Moving robots into the future
Incorporating the latest advances in motion planning,
manipulation, 3D perception, kinematics, control and navigation

Incorporating the latest advances in motion planning,
manipulation, 3D perception, kinematics, control and navigation

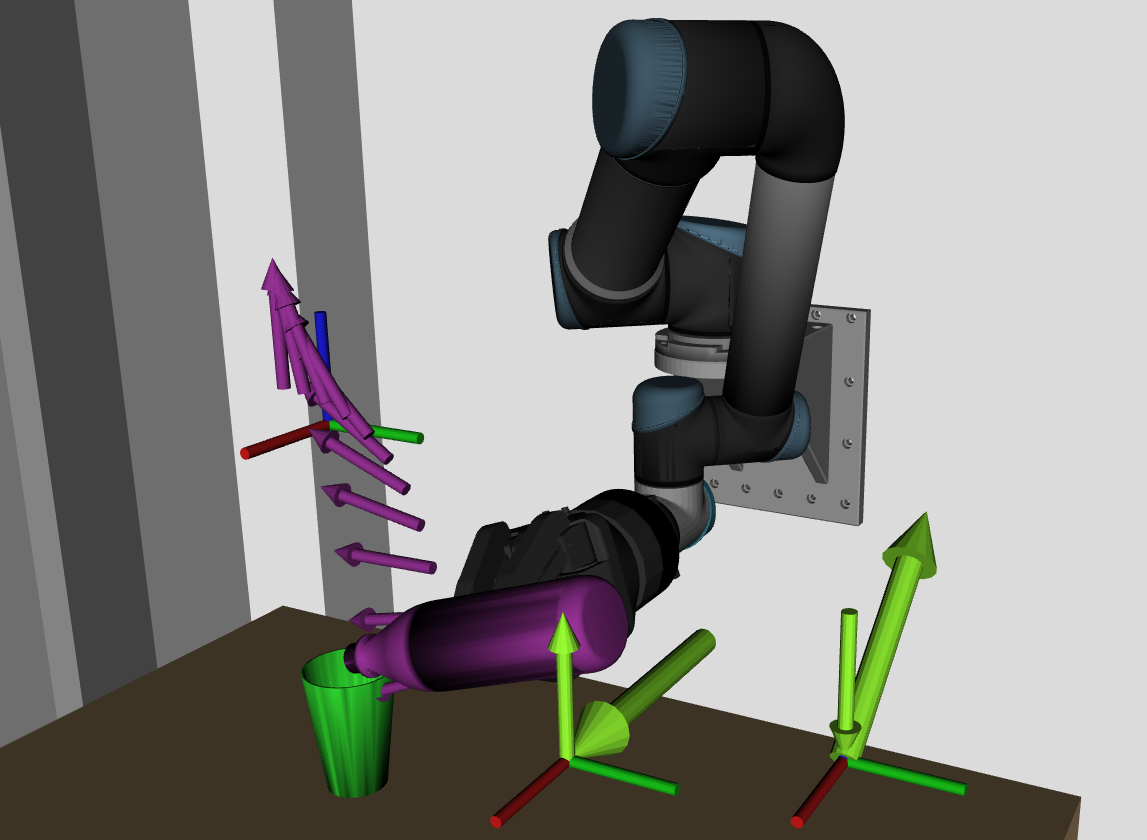
Generate high-degree of freedom trajectories through cluttered environments and avoid local minimums
Analyze and interact with your environment with grasp generation
Solve for joint positions for a given pose, even in over-actuated arms
Execute time-parameterized joint trajectories to low level hardware controllers through common interfaces
Connect to depth sensors and point clouds with Octomaps
Avoid obstacles using geometric primitives, meshes, or point cloud data

Out-of-the box visual demonstrations in Rviz allow new users experimentation with various planning algorithms around obstacles. Execution on physical hardware is then just a click away.
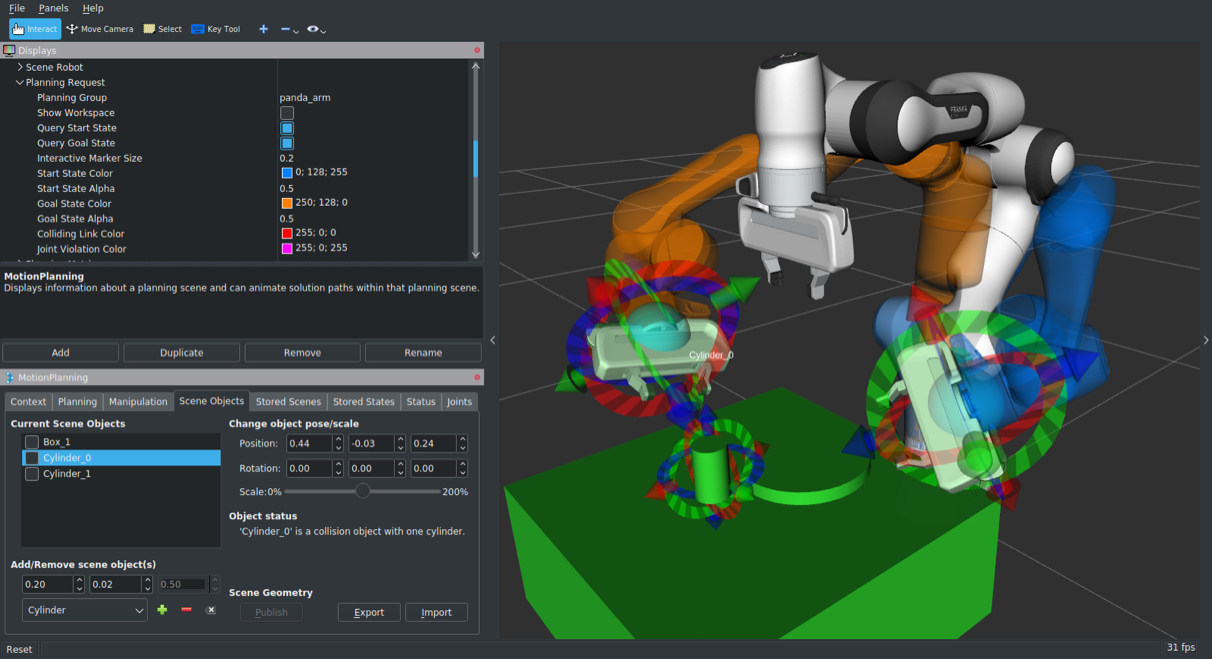

Speed up development and testing cycles by leveraging a full physics-based simulator with MoveIt. Combine Gazebo, ROS Control, and MoveIt for a powerful robotics development platform.
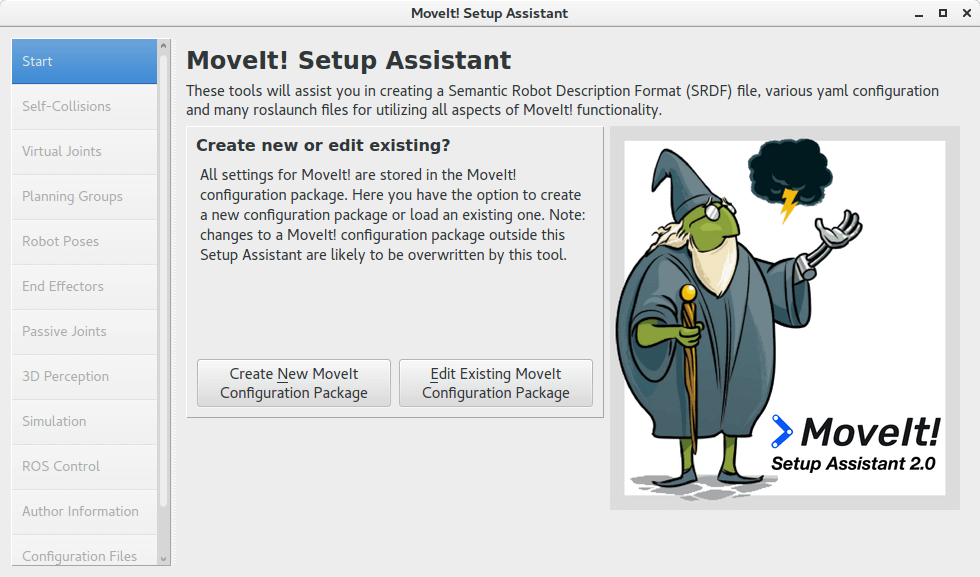
Quickly setup any robot to work with MoveIt with the step-by-step configuration wizard, or use popular pre-configured setups. Also includes configuration of Gazebo and ROS Control.
A flexible and transparent way to define and plan actions that consist of multiple interdependent subtasks.
Libraries for geometric and machine learning-based grasp generation for use with the MoveIt pick and place pipeline.


MoveIt is the most widely used software for manipulation and has been used on over 150 robots. It is released under the terms of the BSD license, and thus free for industrial, commercial, and research use.
By incorporating the latest advances in motion planning, manipulation, 3D perception, kinematics, control and navigation, MoveIt is state of the art software for mobile manipulation.