Sanjiban Choudhury
sanjibanc at cornell dot edu

Assistant Professor
I am an Assistant Professor at Cornell Computer Science where I lead the People and Robot Teaching and Learning (PoRTaL) group. I am also a Research Scientist at Aurora.
My research focuses on advancing imitation learning and decision making in robotics and AI systems. My group works on both theory and algorithms for efficiently training agents with applications to home robots, multi-agent games, language models and self-driving.
Prospective students and undergraduate researchers see this note.
News
| Jul 15, 2024 | New ICML 2024 paper on Hybrid Inverse Reinforcement Learning! We propose a new, practical framework for efficient inverse RL, based on a simple idea: “Don’t be optimal, just be better than the demonstrator” |
|---|---|
| Jun 5, 2024 | We got a Google Research Award for Planning with LLMs! Stay tuned for some exciting work on distilling model-based planning into LLMs to solve decision making tasks. |
| Jun 1, 2024 | Thank you OpenAI for the Superalignment Award! Stay tuned for some exciting work on task super alignment, where we use transfer learning to enable generalization from easy to hard tasks. |
| May 15, 2024 | MOSAIC wins best paper award at Vision-Language Models for Navigation and Manipulation at ICRA 2024! And the best poster award at MOMA workshop at ICRA 2024! |
| Apr 3, 2024 | Excited to finally share MOSAIC! We combine multiple foundation models to design a multi-robot collaborative cooking system. |
| Apr 1, 2024 | Fun talk at Andrea’s class in CMU on To Rl or not to RL! |
| Mar 25, 2024 | New NSF FRR grant on Inverse Task Planning with LLMs with Jeannette Bohg! |
Selected Papers
|
|
MOSAIC: A Modular System for Assistive and Interactive Cooking
Yuki Wang, Kushal Kedia, Juntao Ren, Rahma Abdullah, ..., Sanjiban Choudhury paper / website MOSAIC combines large pre-trained models for general tasks with task-specific modules to enable collaborative cooking. |
|
|
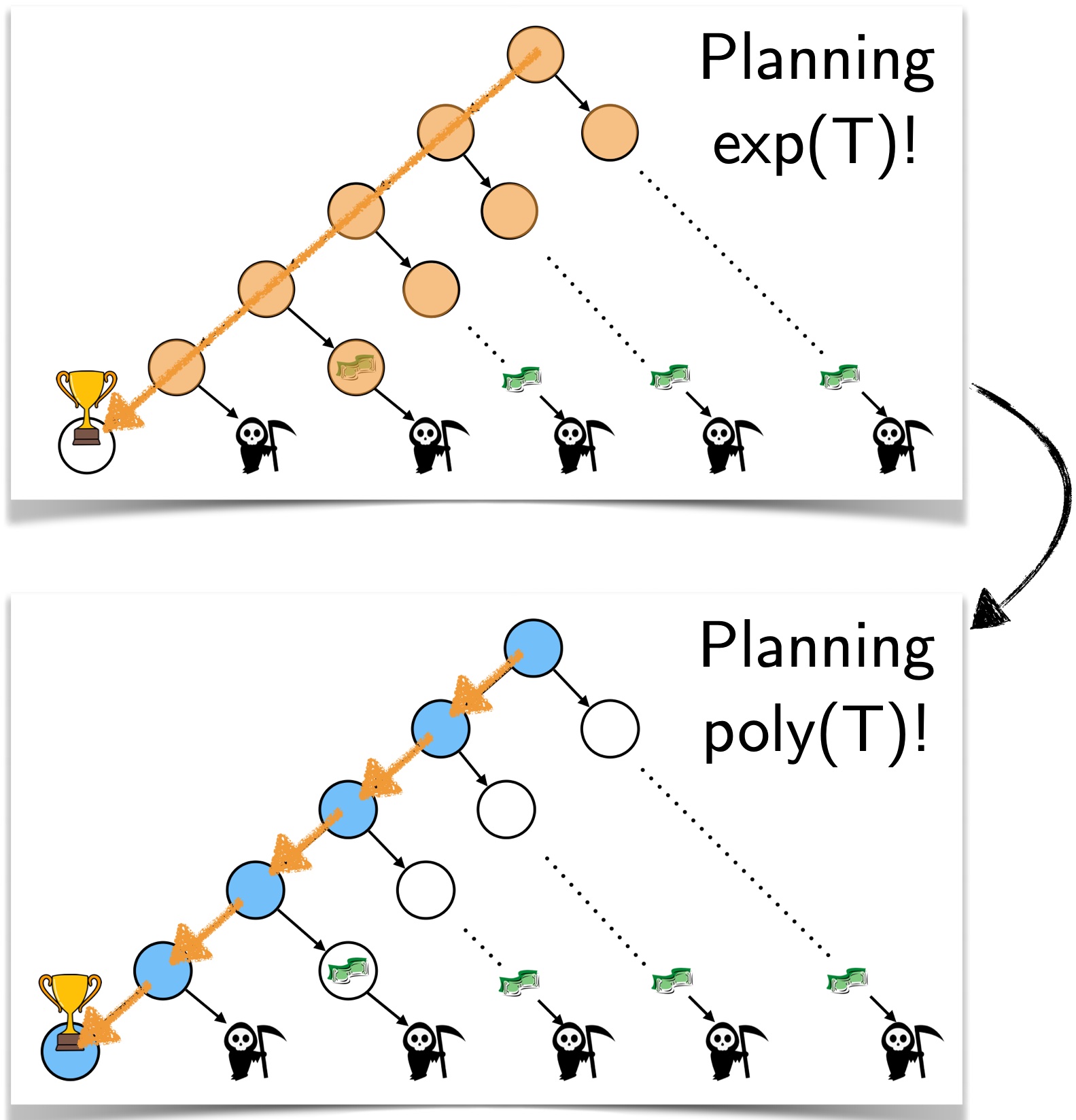
The Virtues of Laziness in Model-based RL: A Unified Objective and Algorithms
Anirudh Vemula, Yuda Song, Aarti Singh, J. Andrew Bagnell, Sanjiban Choudhury International Conference on Machine Learning (ICML), 2023 paper / talk We propose a completely new in Model-based Reinforcement Learning (MBRL) that solves two long-standing challenges: computational efficiency and mismatched objectives. |
|
|
Demo2Code: From Summarizing Demonstrations to Synthesizing Code via Extended Chain-of-Thought
Yuki Wang, Gonzalo Gonzalez-Pumariega, Yash Sharma, Sanjiban Choudhury Neural Information Processing Systems (NeurIPS), 2023 paper / website Demo2Code leverages LLMs to convert demonstrations to robot task code. It recursively summarizes both down to a task specification, then recursively expands the specification to an executable task code. |
|
|
ManiCast: Collaborative Manipulation with Cost-Aware Human Forecasting
Kushal Kedia, Prithwish Dan, Atiksh Bhardwaj, Sanjiban Choudhury Conference on Robot Learning (CoRL), 2023 paper / website ManiCast trains transformer models to predict human motion using cost-aware losses. These forecasts are then used by MPC for collaborative manipulation tasks. |