Abstract
Human-robot interaction (HRI) promises to be a means whereby manufacturing companies will be able to address current challenges like a higher demand for customization. However, despite comparably low costs, there are only few applications in practice. To date, it remains unclear which factors facilitate or hinder the successful introduction of industrial collaborative robots (cobots). In a three-step approach, we first developed a comprehensive two-dimensional framework covering three separate phases and four essential components for human-robot working systems. Secondly, we reviewed related literature to identify relevant success factors. Thirdly, in an online survey we asked leading representatives of German manufacturing companies (n = 81) to assess the importance of these factors from a practical point of view. The results reveal that besides technology-related factors like occupational safety and appropriate cobot configuration, employee-centered factors like the fear of job loss and ensuring an appropriate level of trust in the robot are considered important. However, company representatives seem to underestimate the impact of subtle measures to increase employee acceptance which could be incorporated into internal communication strategies prior to and during the introduction of cobots. Comparative analysis based on three distinct application scenarios suggests that most success factors’ practical importance is independent of the motivation for implementing HRI. Furthermore, answers from practitioners in free-text fields reveal that success factors which intuitively come to their mind such as financial factors are not necessarily perceived most important. Finally, we argue for more application-oriented research that focuses on practically relevant factors to guide HRI research, inform cobot development, and support companies in overcoming apparent barriers.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Automation using industrial robots has been a driver in enterprises during the last decades, leading to an ever-increasing number of industrial robots being implemented in factories [1]. However, the research agenda in the past view years has focused on developing smaller lightweight robots which enable direct interaction with humans without the need for a physical separation, e.g. by security fences. For some years, collaborative robots (cobots) have been commercially available [2]. These robots are usually small, flexible, easy to program, and due to their safety features capable of working with humans in a shared workspace. Hence, they offer enterprises the opportunity to implement human-robot interaction (HRI) applications. Whereas huge conventional industrial robots have been mostly implemented in large companies, cobots are considered an appropriate solution for small- and medium-sized enterprises (SMEs), which typically produce many product variants in small lot sizes and thus require flexible, mobile, and easy-programmable devices [3].
However, apart from show cases and pilot implementations, it is still hard to find successful HRI solutions in practice, especially in SMEs [4]. Hence, the question arises, why the adoption of this promising new technology is progressing so slowly. This is especially surprising given the potential of addressing pressing current challenges, such as shortages of qualified workers [5], increased customer demands for quickly available and individually designed products, and a more competitive market with high pressure on product prices [6] by the introduction of cobots.
Different possible barriers to cobot adoption in enterprises have been discussed, such as insufficient acceptance by employees [7]. However, to the best of our knowledge, there is no holistic and empirically validated overview of success factors in HRI in industrial contexts. Most research focuses predominantly on technical challenges or investigates interactions with social or humanoid robots within a service context. On the contrary, industrial HRI (iHRI) is a very new phenomenon [8] that is underrepresented in research [9], although the development of hybrid teams consisting of humans and their robotic interaction partners raises many new questions also in this application domain. These questions also refer to human factors and social aspects, whose relevance is increasingly acknowledged in functional usage scenarios like manufacturing [10].
Furthermore, in recent years, concerns about the external validity and the representativeness of many theoretically driven studies have been raised. This refers on the one hand to small and non-representative samples [11] consisting of students rather than construction workers, although both populations are known to differ in several ways [12, 13]. Another major criticism are unrealistic experimental application scenarios [14], which take place either in lab [15,16,17] or in virtual reality environments [18]. These concerns call for more in situ studies.
It is still unknown which factors determine the success of implementing an industrial HRI solution in practice. Whereas regulatory, safety, and economical aspects are quite salient, a holistic framework incorporating soft factors referring to employee acceptance or the organizational context is missing. Additionally, the lack of in situ studies demonstrates the further need to improve alignment between research agendas and practical needs of company representatives.
Consequently, this study aims to gather insights about what practitioners consider important when introducing an HRI solution, and to identify reasonable future research directions from a technical as well as a cognitive perspective. This leads to the following research questions:
-
1.
What are relevant success factors from a research as well as a practical perspective regarding HRI implementations and how do enterprise representatives judge their respective importance?
-
2.
How and to what extent does the goal an enterprise wants to achieve by introducing iHRI, influence the perceived importance of these factors?
Answering these questions should pave the way for an increased adoption of this novel technology in practice.
2 Theoretical background
2.1 Industrial human-robot interaction
Industrial robots have been used in production for decades. According to data from the International Federation of Robotics (IFR) [1], between 2013 and 2018, the number of new installations of industrial robots worldwide increased on average by 19% per year, while the stock of operating industrial robots grew by 13% per year. Almost three quarters of installations (74%) are located in only five countries, namely China, Japan, the USA, Korea, and Germany. Most industrial robots are used by the automotive and electrical/electronics industry (each approx. 30% of total installations). While traditional industrial robots still play an important role in manufacturing automation and most robots continue to be operated separately from humans, HRI can be seen as an upcoming trend in production lines. HRI research attracts attention from various research disciplines such as robotics technology when it comes to physical HRI (pHRI), as well as psychology and cognitive science when it comes to cognitive HRI (cHRI), a recent subfield concerned with human factors to account for the complex personal and social dynamics between humans and robots [19]. The latter issues have been intensively explored with regard to service robots or social robots typically used in elderly care or in private households, for example. However, they are also of increasing importance in other application domains, like industrial HRI, which is concerned with robots used in production and manufacturing. This domain provides a multitude of practical applications and hence, a high economic impact, especially for SMEs [20]. Surprisingly, very little research has been carried out to enable robot designers to improve the ergonomic and cognitive aspects for working with cobots [21].
Human-robot collaboration (HRC) refers to a special type of interaction, characterized by (the opportunity for) direct physical contact between a robot and a human, according to ISO definition 8373:2012 [22, 23]. However, even in research literature, the terms HRI and HRC are often used synonymously, whenever a robot is run without a security fence separating it from a human interaction partner [24]. This imprecise use of termini neglects differing requirements of the respective interaction types, for example with regard to employee competencies and security mechanisms, which are only built-in in some types of robots [25]. Existing classification approaches differentiate between several subtypes of HRI, without a consensus having already emerged [26]. Figure 1 provides an integrated overview of the most important types of HRI and their characteristics.
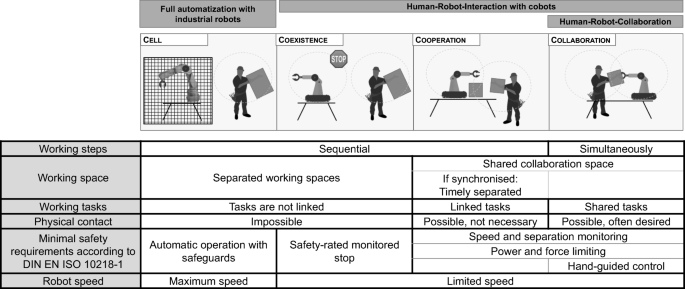
Different interaction types and their characteristics (translated from [27])
In coexistent scenarios, human and robot do not share a common working space, just as in conventional automation. Since no physical separation prevents incidental contacts between human and robot, the cobot is equipped with a security mechanism which makes it stop moving as soon as it detects a human in its workspace [28]. Physical contact is only possible in “operation stop” mode [25]. The interaction is therefore limited to the avoidance of collisions.
In cooperation scenarios, humans and robots share a common working space. However, in timely synchronized cooperation they enter the working space one after another, so that human and robot are not present in the same working space at the same time. In addition, cooperation is characterized by sequential work steps and does not necessarily require physical contact to accomplish the work.
The highest level of interaction takes place in collaborative scenarios, in which humans and robots work simultaneously on the same object in the same working space while performing a joint work activity [25]. In consequence, while conventional industrial robots require physical separation from humans for safety reasons, cobots allow usage in a wider spectrum of interaction options ranging from coexistence to collaboration.
The direct physical interaction of humans and robots without barriers means new safety risks for employees [29]. In order to minimize these, cobots are equipped with various integrated safety features defined by ISO/TS 15066:2016 [30] allowing high levels of automation in the vicinity of the operator [31], namely safety-rated monitored stop, speed and separation monitoring, power and force limiting, and hand guiding.
The safety-rated monitored stop is used for robot applications, where the robot stops and remains stopped when the operator is in close proximity [32]. It is usually implemented by sensors detecting human presence. Since the cobot is only able to resume automatic operation when the person leaves the collaboration area [33], these robots are used for coexistent application scenarios. With speed and separation monitoring, there is no danger for employees when they approach the moving cobot. For this purpose, the cobot must maintain a specified speed and distance from the operator at all times, taking into account the relative speeds between operator and robot [33]. Therefore, the position of humans and the cobot must be known at any time. The implementation can be carried out using different approaches such as 3D image processing or inertial motion capture suits [29]. In contrast to the safety-rated stop, the presence of persons does not necessarily lead to a stop in operation, but initially results in a slowing of the robot’s movements. Ensuring safety by power and force limiting means that human safety is achieved by dimensioning the engine of the robot in such a way that the forces do not exceed a predefined restriction [34]. This on the other hand severely limits payload and speed [29].
2.2 Collaborative robots
Collaborative robots (cobots) are a special type of industrial robot particularly designed for direct interaction with the worker [35]. Consequently, the ability to seamlessly interact with humans is a core part of their functionality and effectiveness [36]. Hence, cobots provide the necessary technology for implementing HRC which promises perfect synergy between the typical complementary strengths of human beings and robots resulting in a superior working system [37]. Table 1 provides an overview of typical complementary capabilities of humans and robots.
The term cobot was first used in a patent specification defining HRC as a method for direct physical interaction between a person and a general-purpose manipulator controlled by a computer [45]. From a technical perspective, cobots are often small and lightweight robots which are relatively inexpensive compared to traditional industrial robots [41]. They usually have less dangerous housing edges and integrated sensors to reliably detect intentional or unintentional contact with their environment [46].
Table 2 compares two robot models from the German manufacturer KUKA with a comparable payload. In contrast to the industrial robot KR6-2, the lightweight robot model LBR iiwa 7 possesses the necessary security mechanisms to be used in collaborative scenarios.
At first glance, optical differences in the robot’s morphology are apparent. This is because the cobot is designed to prevent injuries such as bruising or cuts from sharp edges. The cabling is also integrated in the cobot to prevent possible dangers such as strangulation. The conventional industrial robot has a greater maximum range, and maximum speed. It is also superior to the cobot in its repeatability. The lower repetitive accuracy of cobots [49] is usually due to the required compliant behavior, intended to ensure safety in terms of HRI [50]. While according to [50] for example, Rethink Robotics’ Baxter uses compliant motor-driven springs, Universal Robots utilizes joints with compliant elastic elements for their UR-3/UR-5/UR-10 robots. Such special mechanical components, together with specific control strategies and complex dynamic analyses, could therefore lead to lower repeatability. This should be taken into account when selecting a suitable implementation concept, since conventional systems with additional sensors must be used if commercial cobots do not have sufficiently high positioning accuracy for the task [51]. In this context, [50] propose a collision-detecting sensorized polymeric skin, covering different robotic structures and featuring intrinsically high repeatability and accuracy.
As shown in Table 2, a cobot offers additional flexibility for possible applications due to its lower dead weight and better kinematics (seven axes).
The lightweight construction and the typically easy programming interfaces, e.g. by hand-guiding, open up mobile design opportunities for applications at various workplaces and allow the robot to be used flexibly for different tasks. This makes them especially suitable for companies with small lot sizes, many production variants, and fluctuating production volumes [52]. Therefore, experts attribute a high market potential to cobots, especially for SMEs, which are usually characterized by these specific production characteristics. However, several publications in recent years have shown that this potential has only been realized to a small degree in practice [7, 28, 53] and is only recognized to a limited extent by SMEs [54]. Recently, the IFR considered the forecasts for the global market growth of collaborating robots as “over-hyped” and regards the cobot market with a worldwide share of 3.24% of the total annual installations of robots for 2018 as being still in its infancy [55]. However, since the absolute stock of industrial robots is rising, the number of cobots sold has increased [1].
Some cobots possess anthropomorphic design features and trigger emotional as well as social responses of humans [16], which are inherently prone to anthropomorphize mechanical entities, i.e., to attribute human characteristics to obviously inanimate technical entities [56]. This tendency can be strengthened for example by contextual factors like providing a robot with a background story [57] or by their visual appearance. The industrial cobots Baxter and Sawyer by manufacturer Rethink Robotics serve as examples for a new class of robots which can be classified either as social or as industrial robots [58]. Furthermore, the organizational context in which a cobot is deployed adds another dimension of social complexity [59]. Hence, this wide range of complex mental processes and resulting human and social success factors should be taken into account in cobot introduction processes.
The specific design features of cobots, little existing practical knowledge, and especially the high level of interactivity they offer make their introduction processes very different to technology adoption processes for classical automation devices like big industrial robots, which do not enable direct interaction with employees [60]. In practice, companies face difficulties especially in identifying, planning, and implementing collaborative working scenarios and struggle with assessing the benefits and drawbacks of introducing cobots from a production-oriented as well as an economic viewpoint.
2.3 Application scenarios
Previous research reveals that companies pursue different objectives when introducing HRI solutions in their production, some of which focus on classical production-oriented key performance indicators (KPI), whereas others impact on indirect measures like job attractiveness [27]. In the following, we describe three typical goals associated with the introduction of cobots. Each is motivated by a certain external circumstance posing a challenge for manufacturing companies.
-
1.
Increasing job attractiveness
During the last years, a shortage of skilled workers has become prevalent especially in highly industrialized countries like Japan, the USA and many European Countries [61]. This also affects manufacturing companies which struggle to recruit sufficiently qualified engineers and skilled production workers [5]. Recent data shows that in 2018 it took companies 23 days longer to fill vacancies compared to 2015 [5]. Hence, employers compete for appropriate personnel on the labor market and make big efforts to increase their chances of recruiting suitable personnel. The reputation and publicity of large companies and their financial capabilities, which often allow them to offer higher salaries, makes finding appropriate staff even more challenging for SMEs. Additionally, the manufacturing industry in particular suffers from a poor image in the younger generation, which is shaped by reports of offshoring manufacturing activities and by typically dull, dangerous, and dirty work being perceived as less attractive than paper work in an office [62]. Consequently, many companies regard cobots as a means of relieving employees from physically and mentally stressful tasks, and therefore to increase their job attractiveness to applicants. Additionally, they believe that cobots can be helpful in leveling up their reputation as an innovative employer which can be a decisive criterion especially for young and technology-oriented applicants [27].
-
2.
Increasing flexibility
Mass customization and mass personalization are on-going trends in the production industry driven by increasingly diversified customer needs. Companies aim to fulfill them without losing the classical advantages of mass production such as cost-efficiency due to economies of scale [6]. So far, industrial robots have mainly been used in fully automated cells for mass production with large batch sizes [32]. For SMEs in particular, which often produce small batches and offer a wide range of variants, fully automated robot cells are uneconomical due to long changeover times [63] which would cause their production to be too inflexible to dynamically handle diverse customer requirements. By means of adaptable, easily reprogrammable cobots, companies aim to increase flexibility in their production in order to be able to respond flexibly to increasingly individual customer requirements.
-
3.
Increasing productivity
While the strengths of humans lie, e.g., in sensorimotor tasks or in adapting to new processes, robots have strengths in accuracy, perseverance, and reproducibility [38, 40, 41]. In traditional manufacturing with humans and robots operating separately, the respective strengths have not yet been combined. Some application scenarios offer the opportunity of reducing products’ lead-time with constant use of human resources, e.g., if a cobot makes it easier for an employee to work by holding workpieces in the correct position or if it takes over certain work steps, for example by being responsible for carrying workpieces to the next work station. In conclusion, with the help of HRI systems, some companies expect to increase productivity in situations in which it would be unfeasible or inefficient to automatize a complete working step, but delegating small aspects of the working step to a cobot could ease work for employees.
3 Conceptual work: developing a framework for the introduction process
Different frameworks and reference models for cobot introduction processes in assembly lines have already been presented. One “systematic approach to implement cobots in an assembly system” [64] relies on the engineering design cycle by [65]. In their three-phase model, the authors distinguish between concept development phase, exploration phase, and decision phase. Hence, their model focuses on how to make a decision to use a cobot, how to select an appropriate product, and how to develop a concept for implementing it at a given workstation. The actual implementation and the operation phase of the cobot remain out of scope. In a later publication, they present a three-dimensional reference model, which brings together the chosen interaction model, the HRI team composition, and the resulting HRI safety implications [26]. This reference model does not include a procedural component.
A morphology of HRI implementations proposed by [41] includes quantitative as well as qualitative conceptual and technical aspects. They take into account five different perspectives on HRI applications, namely the objectives and economics associated with HRI implementation, product characteristics of the cobot type, the production process in which the cobot should be integrated, requirements and characteristics for the resulting HRI system, and safety principles. They also specify a set of mostly quantitative indicators for each level to consider when planning an HRI application.
A two-dimensional design and implementation framework proposed by [52] includes key questions to be answered from different perspectives. They distinguish between a system, embodiment, and detail viewpoint, which refers to the granularity of the information needed for conceptualizing an HRI implementation ranging from general to specific. The framework is generic enough to be useful for other technologies as well.
Another approach relies on a version of the HTO-framework by [67] adapted to the context of HRI [66]. It originates from occupational safety and accident investigation in order to identify the origins of failures and to attribute them to either the human operator (H), the technology (T), or the organisation (O), that is, to the management or work environment, for example. The strength of this model lies in the fact that it accounts for the complexity of socio-technical systems, whose parts must be considered holistically [66].
All frameworks or reference models share the goal of guiding HRI designers through the complex planning process without neglecting important aspects, points of views, or indicators. Most of them focus on technical and production process-related considerations, whereby employee-centered factors like acceptance remain underrepresented. None of the models explicitly include the operation phase after the actual implementation and only one approach relies on the notion of the worker and cobot building a joint socio-technical system operating dynamically within complex and often social contexts [66].
To classify success factors, we differentiate between the four components of the social-technical HRI working system, namely (1) human operator, (2) cobot, (3) working system, and (4) enterprise and contextual factors similarly used by [68] (Fig. 2).
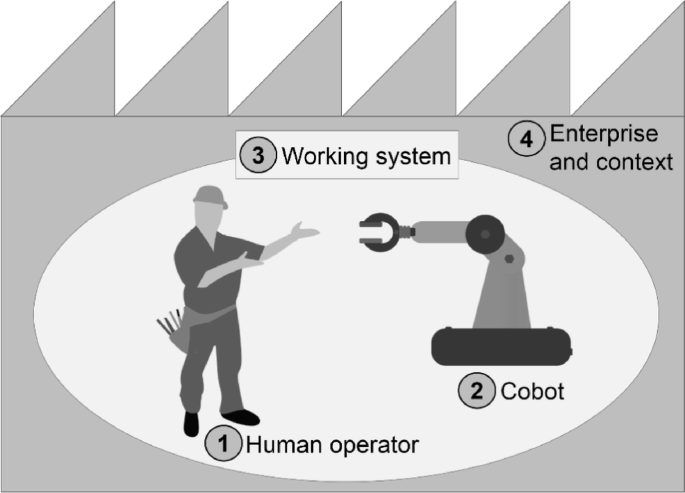
Four essential parts of HRC solution (vertical framework dimension)
Other researchers refer to human operator and cobot by using the terms subject and object factors, respectively [68, 69]. The human operator level incorporates all individual factors of the employee that collaborates with the robot, whereas the cobot level describes its functional as well as non-functional characteristics. The human operator and the cobot form a working system (ISO 6385:2016 [70]), whose effectiveness and efficiency depends on the employee’s individual abilities, the performance of the cobot, and on their interaction. In the sense of the user-centered design process (ISO 9241-210:2019 [71]), the context of use, user requirements, and needs have to be considered to make the cobot application successful. Finally, the enterprise and context level focuses on framework conditions such as the work culture in the given enterprise or the position of the human operator within the company’s hierarchy. The importance of these framework conditions have been stressed in recent literature [2, 72].
For the assignment of success factors to the presented levels, it is decisive to whose property the success factor relates. For instance, trust in the robot is assigned to the human interaction partner, because it is a human characteristic to either trust or mistrust a robot.
The horizontal dimension refers to the chronology of a cobot introduction process in an enterprise (Fig. 3). We divide this process into three main phases; first, the decision phase, in which a company elaborates whether it is useful and feasible to introduce a cobot solution; second, the implementation phase, in which the cobot’s specifications have to be clarified; and third, the operation phase, in which the cobot is run, monitored, and evaluated within the production environment. For sure, it has to be taken account that these three phases are neither completely separated, nor do they constitute a one-directional linear process in practice. For example, practical issues in the implementation phase can lead to a reconsideration of the general usefulness of a cobot solution and to a withdrawal of the former decision, which results in a process with iterative circles. Furthermore, as with any model, dividing the whole process into only three parts oversimplifies reality, since the decision phase could be further divided into idea and concept phase, exploration phase, and actual decision phase like in the model by [64], for example.

Three phases of the cobot introduction process (horizontal framework dimension)
Success factors are assigned to the phase in which its achievement can actually be measured. Although as many success factors as possible should be considered in the decision phase to come to a qualified decision, some factors like, e.g., the reliability of a robot, operationalized as the number of malfunctions per working time, can only be measured when it is in productive operation. Therefore, this success factor is assigned to the operation phase.
While the decision phase is characterized by estimating relevant parameters and identifying circumstances which lie beyond the companies’ sphere of influence, most factors in the implementation phase can be actively influenced. A similar differentiation is used by [73] in their so-called HRC acceptance model (HRC-AM), which is an adaption of the classical technology acceptance model (TAM), first introduced by [74] and further developed and adapted to different contexts like automation [75] or even HRI [73, 76,77,78]. They distinguish determinants of robot acceptance into anchor variables that lie beyond an organization’s sphere of influence and adjustment variables that can be shaped by the organization. In the operation phase, formerly anticipated measures can finally be tracked and used for evaluation.
4 Empirical work
The research design generally follows a mixed method approach, that is, a combination of qualitative and quantitative methods. This approach allows incorporating a researcher and a practitioner perspective. While the researchers’ point of view is represented by a systematic literature review, revealing relevant aspects and possible success factors for the introduction of cobots in enterprises, the practitioners’ perspective is determined by means of an online survey of 81 company representatives.
4.1 Systematic literature review
To gather an overview of relevant literature, we searched the following databases for scientific, peer-reviewed publications related to the topic of collaborative robots (in a workplace setting) with a publication date no earlier than 2005:
-
Springer Link
-
Science Direct (Elsevier)
-
Sage Journals
-
Taylor & Francis online
-
DOAJ (Directory of open access journals)
The term for search was (collaborat* AND robot*) OR (cooperat* AND robot*) OR cobot in which the asterisk functioned a placeholder for any characters. Additionally, we searched in Google Scholar using the following more specific search term: ((collaborat* AND robot*) OR (cooperat* AND robot*) OR cobot) AND (manufacturing OR assembly OR industry OR industrial OR workplace). The literature search was conducted in October 2018.
This initial search yielded 754 matches (including duplicates) containing the term in the title. After removing duplicates, articles that did not focus on HRI at all or on HRI in non-industrial sectors, 95 articles remained. In the next step, we screened the abstracts and the Result sections of the remaining articles to check whether they included information about relevant success factors or environmental conditions, and, if so, whether that information was generalizable in a sense that it did not stem from merely a single case study. We ended up with 22 publications, which we analyzed deeply. By screening reference lists of those publications, we identified and added another 15 publications. Altogether, this provided us with 37 scientific publications for the literature review. Figure 4 visualizes the entire search and selection process.

Procedure to identify and select relevant publications for the systematic literature review
4.2 Online survey
Based on the results of the literature review, that is, a comprehensive list of success factors considered in research literature, we conducted a quantitative online survey, in which German practitioners evaluated the importance of the identified success factors. Hence, while the list of success factors stems from international research literature, the empirical evaluations of importance are based on a country-specific sample and should be interpreted in the light of the German manufacturing context (cf. Limitations). In this sense, the exploratory literature work was a prerequisite for the quantitative empirical work. In order to test whether success factors depend on the goal companies seek to achieve by HRI applications, subjects were randomly assigned to one of three possible scenarios presented in chapter 2.3.
4.2.1 Participants
Participants were recruited via a panel provider. Since we were particularly interested in the viewpoint of enterprises, we only included subjects that met the following inclusion criteria: (a) Employed in an enterprise in the manufacturing industry; (b) worked within the enterprise either in manufacturing/production, or in logistics/materials, or as a manager/CEO; and (c) worked either as a production planer or in a managerial position, e.g., as team leader or factory leader. Screening questions at the beginning of the survey were used to check whether participants matched the given criteria. These criteria were intended to ensure that all subjects possessed practical expertise regarding production processes, were used to reasoning on a strategic level in their enterprise, and held decision authority. Furthermore, speeders who completed the survey in less than five minutes were excluded from the data to increase quality. Since the survey was implemented in German, only people living in Germany and able to speak German were recruited. They took part on a voluntary basis and were rewarded for completing the survey according to the panel provider’s terms of use.
This resulted in a sample of 81 participants (63 male, 18 female). All participants were aged between 24 and 75 years (M = 46.96; SD = 12.749) and had between one and 47 years of practical working experience (M = 15.94; SD = 10.632). Forty-nine participants had completed an apprenticeship (60.5 %), 30 held an academic degree (37.0 %), and two had not completed neither an apprenticeship nor a study (2.5 %). Sixty-one of 81 participants (75.3%) worked in the production/manufacturing, whereas 14.8% worked on a managerial level and 9.9% in logistics/materials. Further, 85.3% were in a leading position, such as team leader or factory leader, whereas the remaining 14.8 % work as production planners. Altogether, based on this demographic data, subjects were expected to have sufficient experience as well as expertise to provide qualified information.
Figure 5 shows the distribution of the industrial sectors of the companies in the sample compared to the distribution in the German economy as of 2018. Overall, the distribution seems comparable, which is also suggested by a significant Spearman’s correlation, r = 0.71, p = .020. To conclude, although some sectors like mechanical engineering are overrepresented (24.7 % compared to 16.9 %), the distribution can be regarded as representative for the German economy.
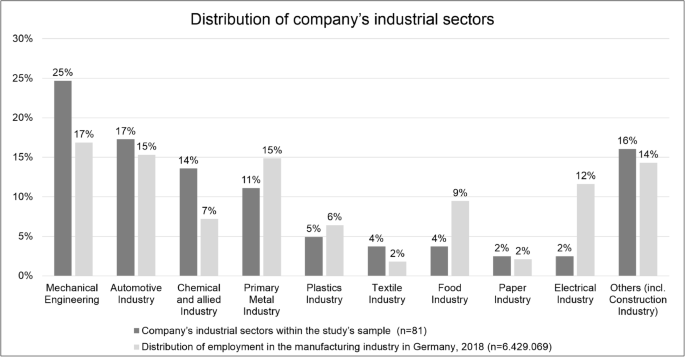
Distribution of company’s industrial sectors within the study’s sample and the German manufacturing industry, respectively. Source of economic data: German Federal Statistical Office
Forty-six of 81 subjects (57 %) work in large companies, whereas the remaining 35 subjects (43 %) are employed in SMEs, according to European Union’s (EU) classification [79], neglecting balance sheet total, which was not questioned in our survey due to pragmatic issues. Large companies are therefore overrepresented in the present study.
Thirty-eight of 81 (46.9 %) subjects have already dealt very intensively with automatization solutions and 16 out of 81 (19.8 %) with collaborative robots in particular. Twenty-one participants (25.9 %) possess practical experience with the introduction of a cobot in their current or past enterprise.
On average, it took participants 12:10 min to complete the entire survey.
4.2.2 Materials
At the beginning of the survey, subjects were shown a specific scenario, in which a company named Meyer Ltd. planned to introduce a cobot to tackle a specific external challenge. The three different scenarios were created according to the typical real-life goals of companies, as described in chapter 2.3.
We asked participants on a five-point, one-sided Likert-scale ranging from 1 = not realistic to 5 = very realistic, whether they consider it as realistic that (a) their employer would face a similar situation to the fictitious company, and (b) their employer would have similar considerations to address this situation, that is, consider introducing a cobot solution. For both aspects, the scores lay between reasonably realistic and quite realistic (M = 3.20, SD = 1.239 and M = 3.26; SD = 1.292, respectively, n = 81). A one-way analysis of variance (ANOVA) revealed no significant differences in ratings across the three scenarios, (F(78) = 2.247, p = .112; F(78) = 1,771; p = .177). We interpret these results in a sense that the scenarios were realistic enough for the participants to make reasonable considerations and judgments of importance of possible success factors.
4.2.3 Measurements
The rating scale to assess the importance of the given success factors was a five-point, one-sided Likert scale with verbal items, ranging from 1 = not important to 5 = very important. The verbal descriptions were chosen according to [80] and were presented in German. Due to the equidistant verbal labels, the scale is considered as quasi-metric for data analysis purposes.
4.2.4 Design
We used a one-way between-subjects design. The goal of cobot introduction was used as three-leveled nominal independent variable. The quasi-metric scaled perceived importance of each possible success factor was used as dependent variables.
Participants were quasi-randomly assigned to each condition, yielding 28 participants in the increasing job attractiveness condition, 25 participants in the increasing flexibility condition, and 28 participants in the increasing productivity condition. Because we expected a high rate of screen-outs due to the specific population, we employed a quasi-randomization algorithm that assigned incoming participants to the condition with least completes. Therefore, we managed to achieve almost equal-distribution of participants to the conditions despite our relatively small sample and the large screen-out rates.
4.2.5 Procedure
At the beginning, participants had to pass three screening questions. After that, we provided all participants with some introductory information about cobots, together with one of the three fictitious enterprise scenarios. In order to ensure that participants read the entire scenario description, they were technically forced to stay on this page for at least 20 seconds before being able to proceed.
Thereafter, participants had to pass a manipulation check. They were asked to choose the fictitious enterprise’s strategic goal mentioned in the scenario shown before. Participants who did not answer correctly had to leave the survey. On the next page, participants were asked to rate the realism of the presented scenario. Afterwards, they should imagine being responsible for a cobot introduction process within the described company. In free-text fields, they were asked to enter the most important success factors. Afterwards, participants were asked to assess the importance of randomized batteries of possible success factors for the HRI solution in the fictitious company with regard to the achievement of the enterprise’s goal according to the presented scenario.
At the end of the survey, participants were asked to provide information about their personal experience with automatization and cobots, as well as some general information about their employer and their general professional experience. After submitting their answers, subjects were redirected to the panel provider’s website where they received their reward for participating.
5 Results and discussion
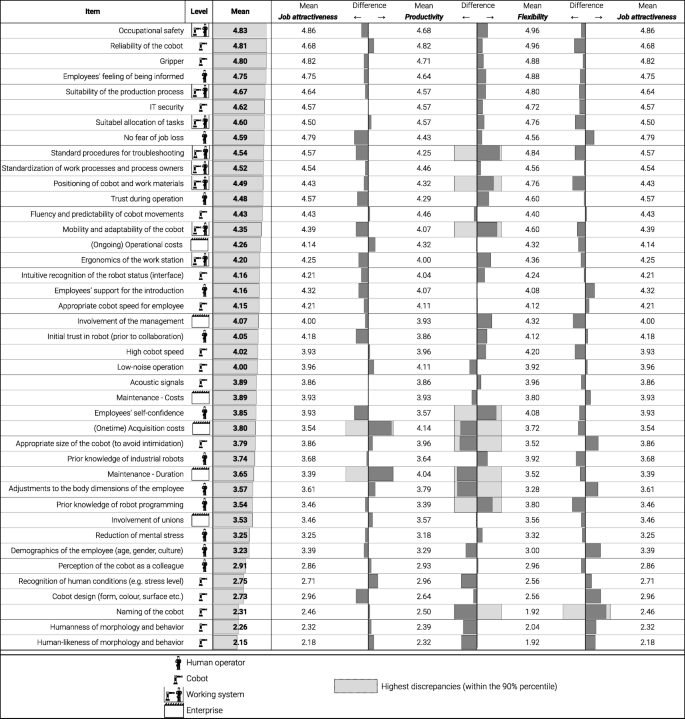
Figure 6 shows the success factors identified from literature, their integration into our proposed framework, and their importance ascribed by company representatives. In the following subchapters, we discuss some important themes that arise from the ratings.

Perceived importance of success factors for cobot introduction based on empirical research (framework)
5.1 Occupational safety
It is not surprising that occupational safety was rated most important (M = 4.83). Insufficient safety mechanisms are a key obstacle, since decision-makers are often directly responsible for the safety of their employees. The high level of awareness is in line with practical experiences as well as with findings from literature identifying safety issues as a main barrier to cobot introduction [27], especially since not only the cobot itself but the whole working systems has to be considered in a risk analysis [38]. This often represents a complex and time-consuming endeavor potentially undermining the key advantage of cobots being highly adaptable to new tasks and working situations.
Introducing a cobot in a shared environment leads to new hazards that should be considered and ideally eliminated [31]. In the methodology of [31], hazards are categorized according to their hazard paths between the origin and the affected person, namely exposure, contact, and collision. While exposure refers to all hazards that can occur from distance (e.g., vapors), contact includes those hazards that can cause damage through direct contact, even if human, robot, or both are at rest (e.g., exposed electrical contacts). The third type of hazard relates to the collision of human and robot. Hazards of this type are evaluated based on the kinetic energy defined in ISO/TS 15066:2016 [30]. Within Annex A of ISO 10218-2:2011 [81], various hazards are listed that can occur in the context of robot systems. The list is based on ISO 12100:2010 [82], which deals with safety of machines in general and proposes hazards of different kinds such as mechanical, electrical, thermal, noise, vibration, radiation, material, ergonomic, environmental, and combined hazards. The listed hazards can be used for a top-down risk assessment approach [29]. For this purpose, the application designer works with a safety expert identifying possible hazards for each step in the process, which are assessed afterwards in a risk evaluation, whereby risk is defined as “the product of the severity of the damage and the probability of occurrence” [83]. The severity of damage can range from minor incidents resulting in no or minor injuries to catastrophic consequences leading to death or injuries with permanent disability. Risk matrices can be used to identify highest priority hazards by combining expected severity and probability [84]. On the other hand, the probability of occurrence can vary from very unlikely to very likely [29]. In addition to the aforementioned standards ISO 10218-2:2011 [81] and ISO 12100:2010 [82], the risk assessment process should consider ISO/TR 14121-2:2012 [85], which provides practical guidance for risk assessment as well as ISO 10218-1:2011 [33], ISO 13849-1:2015 [86], and the European machinery directive 2006/42/EC [87], which describe detailed procedures for risk assessment of a workplace and its individual components [88].
In addition, the technical specification ISO/TS 15066:2016 [30] was introduced in 2016 to address the increasing use of cobots, which, unlike conventional industrial robots, allow direct contact through integrated safety features. This opens up new possibilities compared to ISO 10218 (version 2011) containing restrictive safety requirements, severely limiting physical interaction between human and industrial robots. In the near future, the release of an updated version of ISO 10218 is planned, which includes instructions on the safety of cobot systems from ISO/TS 15066. A current draft (ISO 10218-1:2020-04) already exists. In this context, the progressive development of new standards over the past years illustrates the increasing trend toward industrial HRI [89].
Apart from legal issues, it has to be taken into account that occupational safety also influences workers’ acceptance of a technology. If employees doubt their cobot will always work safely in any case, they will interact less fluently or even refuse to work with it. However, it has to be noted that perceived safety does not necessarily reflect real safety [90].
5.2 Fear of job loss
Prior research revealed that employees often associate the introduction of robotic technology with a fear of being replaced by machines [13], which has been a typical barrier to technology adoption processes since the first industrial revolution [91]. It is therefore considered an important success factor for companies to address employees’ worries about losing their jobs. Often, there is only a thin line between perceiving a cobot as a supporting colleague or a superior competitor [92], which makes it hard for decision-makers to predict how employees will relate to the cobot [93]. Our findings reveal that decision-makers are well aware of the big impact of this fear on the success of a cobot introduction (M = 4.59).
The vision of being replaced by a cobot threatens employees’ concept of self-worth and raises concerns about their long-term economic situation [94], which stresses the psychological relevance and rationalizes the possible negative impact on employees’ behavior. Hence, [95] conclude that this fear is one of the most influential factors hindering cobot acceptance.
Whether this fear can be rectified by actual developments on the labor market driven by increasing adoption of automation and robotic technology has been subject of many studies and controversial discussions in the public [96]. In any case, it is important to distinguish conventional automation from cobots, because the latter are not intended to completely substitute humans but complement them in a collaborative scenario [38]. This fact is supposed to minimize fears of being replaced [97]. However, the predominant usage in coexistent and cooperative application scenarios in reality [27] and the lack of knowledge about differences and similarities to classical industrial robots make virulent fears of job-loss plausible. Additionally, experimental findings reveal that even if workers are able to identify advantages compared to classical robots, they nevertheless expect cobots to have a negative impact on the availability of jobs [91].
Consequently, those concerns should be considered in internal top-down communication strategies. Besides avoiding fear of job loss, employees’ feeling of being informed (M = 4.75) and employees’ support for the introduction (M = 4.16) are among the most important factors on human operator level. This strengthens the necessity to inform staff properly and transparently about the impending change and the corresponding benefits for them [98]. In order to raise acceptance, company representatives should state clearly that cobots are generally no appropriate means for substituting but rather for complementing the human work force. Furthermore, employees should be provided with reasons and expected advantages that led to the decision for the cobot introduction. Although the need to inform staff is common sense in change management literature, an exploratory case study in the industrial context revealed a lack of employees’ knowledge on how a cobot introduction would change their daily work routines [98]. Even if management is well-aware of the need to inform staff, the actual implementation and execution of communication strategies frequently show deficits [53]. However, a high involvement of employees in the cobot introduction process has the potential to evoke a feeling of participation and identification with the project and to encourage employees to support the initiative. According to the rating results, the involvement of unions in the introduction process does not seem to be a necessary but a helpful prerequisite (M = 3.53).
5.3 Trust in the cobot
Trusting the cobot prior to its introduction (M = 4.05) as well as during operation phase (M = 4.48) is the most important human factor during the decision and the operation phase, respectively. This demonstrates that company representatives acknowledge the relevance of soft, employee-related aspects and do not merely focus on the system’s functionality. Employees’ trust in the cobot is also considered a crucial aspect in research literature and has been found to depend on social and emotional factors [99]. Trust can be conceptualized as a necessary yet not sufficient prerequisite for successful HRI [100] and cobot acceptance [101]. However, trust evolution begins before the actual implementation of a cobot, that is, before the reliability becomes apparent. Therefore, initial trust prior to actual interaction and dynamic trust during interaction should be differentiated, as it is done within the widely used trust in automation model by [102], one of the most comprehensive models in this domain [103]. According to this model, trust can be divided into three components, namely dispositional, situational, and learned trust. Whereas dispositional and most situational factors can hardly be influenced, initial and dynamic learned trust result from an employee’s mental model of the robot, that is, an internal representation of the cobot’s characteristics from which actual expectations are derived and which is continuously modified by experiences [104, 105].
During the operation phase, it is evident that the (perceived) actual reliability of the cobot (M = 4.81), defined as coincidence between employees’ expectations and actual observations, mainly determines the level of trust [106]. Trust in the robot often increases when working with the robot for the first time, since the employee can become familiar with the robot through contact with it [107]. Additionally, the fluency and predictability of cobot movements increases dynamic trust and is hence attributed a high importance rating. These two aspects combine to form a so-called functional component of trust, which determines to what extent employees actually rely on the cobot. Apart from those functional issues, especially initial trust can be influenced by internal top-down communication strategies. Measurements for influencing initial trust are more subtle and complex. They aim at fostering employees’ willingness to accept the cobot in advance, and to develop an appropriate mental model which allows for positive experiences during the interaction. Since trust evolves in a non-linear way and is especially vulnerable during first interactions, it is decisive that the latter are perceived as positive. Many good experiences are necessary to compensate for a single negative experience [108, 109].
Hence, it seems reasonable for company representatives to address the issue of employees’ trust. Their goal should be to calibrate the trust level in an appropriate manner, that is, employees should neither over- nor underestimate the capabilities of the cobot, because this could lead to its misuse or disuse [110]. In case of misuse, an operator would probably rely too much on the robot and thereby overlook its drawbacks and failures. In case of disuse, an operator would refuse to rely on the cobot and hence, would not realize its potential.
Surprisingly, though, according to the literature many factors, which serve to increase trust in the cobot, were attributed only minor importance in the survey. This refers particularly to factors influencing affective trust. Whereas cognitive trust is based on (rational) knowledge about the device, affective trust originates from a spontaneous and thoughtless reaction to the devices, which can be influenced by subconscious mechanisms like anthropomorphizing the robot [111]. This affective response can be improved for example by giving the cobot a human-like name (M = 2.31), a human-like design (M = 2.15), or a likeable design (M = 2.73), all factors that are considered less important. This also holds true for perceiving the robot as some kind of colleague (M = 2.91). These findings suggest that company representatives are not aware of measures for enhancing human-robot trust, although they acknowledge its importance in terms of the success of the HRI solution. This is in line with findings by [53] indicating that acceptance is considered important by company representatives, but rarely sufficiently addressed in practice in the implementation process. Although many decision-makers in the production sector know about the ineffectiveness of a purely technocratic implementation approach, they often fail to establish a process that fosters acceptance, because they probably underestimate the impact of subtle yet influential measures to alter (affective) trust development.
5.4 Appropriate cobot configuration
At first glance, it becomes obvious that factors on working system level like the suitability of the whole production process (M = 4.57), task allocation (M = 4.60), as well as the positioning of working materials (M = 4.49) at the new cobot workstation are overall of highest importance. Company decision-makers seem to consider cobots as a solution, whose success depends to a high degree on the possibility to be fluently integrated in an existing process. The latter should be carefully selected and analyzed in advance, as not every process is suitable for implementing a human-cobot work system. This illustrates the complexity companies face even early in the decision phase, because they need to have considerable knowledge on the necessary prerequisites for an optimal workstation configuration. Furthermore, they recognize the necessity of adjusting the cobot configuration according to the employees’ demands. For instance, practitioners consider it quite important to adjust the cobot’s working speed to the speed of the employee (M = 4.15), which helps to avoid an increasing stress level. It is notable that adjusting the working speed of the cobot was more important than maximizing it (M = 4.02). Aligning the cobot’s position to the employee’s body dimensions was considered average important (M = 3.57). The same holds true for employee demographics (M = 3.23) like age, gender, and cultural background, although prior research reveals that individual as well as cultural factors shape the acceptance of cobots, since they are often related to the affinity for technology [112].
5.5 Financial factors
With regard to financial factors, one-time acquisition (M = 3.60) and maintenance costs (M = 3.69) are considered less important than ongoing operational costs (M = 4.26) which have a larger impact on key indicators like unit costs from a long-term perspective. However, it has to be admitted that cost calculation represents another key challenge because the attribution of value-added to the human operator and the cobot is fuzzy in joint human-cobot teams and total costs exceed one-time acquisition costs of the cobot itself [41].
Overall, comparing the ratings for financial factors with the number of mentions in the open-ended questions reveals a discrepancy between salience and importance of factors. Participants provided 251 meaningful answers in the free text fields, which we clustered into different groups, as shown in Fig. 7.

Success factors mentioned in free text fields (clustered) with number of mentions
Financial aspects were mentioned by far most frequently, followed by production flexibility, handling and programming, attractive working conditions, and occupational safety. Financial factors seem to come quickly into the minds of participants although they are attributed only average importance. A comprehensive list of success factors as provided in this framework could help to overcome discussions primarily driven by financial considerations, thereby overshadowing other important success factors.
5.6 Independence of company goals
In order to examine whether the importance of success factors depends on the goal that drives the cobot introduction, we conducted a one-way multivariate analysis of variance (MANOVA) with the presented scenario as independent variable (three levels) and the evaluated possible success factors as dependent variables. As MANOVA is regarded robust against violations of the assumption of normal distribution [113], MANOVA was used although data was not normally distributed. Correlations between dependent variables were low (r < .90), indicating that multicollinearity was not a confounding factor in the analysis. No multivariate outliers were found, as indicated by Mahalanobis distance (p > .001). The analysis revealed no significant effect, F(82,76) = 1,05, p = .415; Wilks’ Λ = .220, which means that success factors are overall independent of the goal associated with cobot introduction. This facilitates generating a comprehensible list of success factors and recommendations to foster cobot implementations applicable to a wide range of companies facing different challenges and pursuing different goals.
However, Fig. 8 shows some remarkable discrepancies in the rating of some success factors dependent on the goal. In the following, we discuss comparably large discrepancies (90% percentile of discrepancies).
Perceived importance of success factors for cobot introduction based on empirical research (bar chart)
Most differences can be found between the productivity and flexibility scenario. Not surprisingly, the cobot’s mobility and adaptability as well as its positioning in relation to working materials at the workstation is much more important if a company is seeking to increase the flexibility of their production. Short changeover times and quick tool changes enable the necessary adaptability of the system and hence a high level of production flexibility [114]. Cobots’ suitability for flexible production environments (e.g., [32]) and the growing demand for greater product diversity and product individualization (e.g., [115]) make the standardized handling of errors while introducing the cobot highly relevant. Hence, well-established standard procedures for troubleshooting are considered more important for improving flexibility than for increasing productivity.
Deviations from the standardized work practice by human interaction partners could cause the HRI to fail. For example, if an employee does not place a certain workpiece in the pre-defined joint hand-over area with the cobot, the latter is unable to proceed unless cobots are equipped with artificial intelligence for object recognition and independent planning of trajectories and work steps. Well-defined detailed manuals on how to perform the manual work avoids unintended cobot behaviors, defects, or downtimes. Additionally, also in case of a defect, employees should know how to perform troubleshooting to re-start the working process without losing much time. In a flexible production environment, in which the robot is required to adapt regularly to different production processes, it is of increasing importance to have these manuals prepared for each process.
Furthermore, flexibility seems to pose increased demands at employees. Their self-confidence and prior knowledge of robot programming are considered of superior importance. Company representatives probably consider programming skills necessary for adapting the cobot to different tasks. Self-confidence might be necessary to cope with different application scenarios without being afraid of dealing with changes.
On the contrary, for the productivity scenario, indicators influencing costs per unit like acquisition costs and maintenance duration are of superior importance. Additionally, an appropriately sized cobot, which is adjusted to the body dimensions of the human operator, is considered crucial. It is noteworthy that this adjustment is obviously considered as a means to increase productivity and fluency of HRI rather than as a means for enhancing ergonomics and in turn job attractiveness. The fact that company representatives acknowledge the importance of a suitable configuration of the cobot, which has to form an optimal working system with the corresponding human operator, underpins the notion of human-robot teams as socio-technical systems.
Surprisingly, only a few discrepancies compared to the job attractiveness scenario were identified, although this scenario is the only one that focuses primarily on employees’ satisfaction instead of production characteristics. Company representatives highlight the differences between the other two scenarios, with which they are probably more familiar. Some factors such as the ergonomics of the workstation have not been considered as significantly more important for the job attractiveness condition. This might stem from little knowledge and awareness about aspects facilitating job attractiveness.
6 Limitations
Since we recruited participants via a panel provider, we cannot be sure whether the given company details are true. However, random manual checks did not indicate any implausibility within our data. The empirical data relies on evaluations of practitioners who are by nature subjective. We are unable to derive any information about whether the success factors are indeed important. To objectify the subjective evaluations, large databases with information about the development of companies’ performance metrics before and after cobot implementations would be necessary. Additionally, it remains unclear whether the collection of success factors was exhaustive. A broader search including additional scientific databases as well as full text instead of title search could have revealed some additional factors. However, it can be assumed that the most relevant success factors were covered because practitioners did not frequently mention additional factors in free-text fields.
While the framework and the included success factors are globally representative, the assessments of importance relies on a sample of German company representatives. Therefore, these empirical results cannot be generalized to other countries, especially since previous studies highlight the influence of a subject’s culture on their general attitude toward robots and their willingness to work with them [116]. However, cross-natural studies revealed that individual factors are usually more important than country-specific ones when it comes to robot acceptance at work, which suggests that results should be transferrable to other countries at least to some extent [112]. Thereby, it has to be taken into account that the density of industrial robots in Germany is far above average with 338 units per 10,000 employees compared to 99 units per 10,000 employees worldwide [1]. Additionally, Germany is a technology-oriented country with a comparably high degree of automation, which is associated with high robot acceptance and experience in integrating them in production lines [112], and with a comparably high shortage of skilled workers which puts job attractiveness into focus [61]. Therefore, importance ratings might differ in countries with different characteristics in that factors related to the well-being of employees might be assigned less importance in countries with an abundant supply of labor for instance.
Furthermore, the lack of significant effects across scenarios could possibly be due to the limitations resulting from the very specific target population. However, the sample size is relatively large compared to similar studies. Additionally, it is possible that subjects were not aware enough of the presented company scenario and judged the presented success factors based on their real company’s context. Due to the many success factors, results could have suffered from fatigue. This would also explain the lack of significant deviations across scenarios for success factors that were expected to differ from a theoretical viewpoint.
7 Conclusion and outlook
Given the high potential of cobots as an advanced future manufacturing technology, which is currently insufficiently realized in practice, we aimed at identifying important success factors for cobot introduction in enterprises from a theoretical as well as a practical perspective. First, we developed a comprehensive framework conceptualizing human-robot teams as socio-technical systems and extracted success factors from research literature. Second, we assessed the latter’s perceived importance from the viewpoint of practitioners dependent on three fictitious company scenarios, in which the cobot implementation is associated with an increase either in production flexibility, in productivity, or in job attractiveness.
Our results emphasize the importance of several topics also discussed in literature such as (perceived) occupational safety and avoiding fear of job loss. Practitioners seem to lack a clear picture of what determines their workers’ trust in a cobot and how to influence trust particularly prior to the actual cobot implementation by appropriate communication strategies. Furthermore, they seem to underestimate the complexity of robot programming, while acknowledging the need to find specific targeted and individually configured solutions to integrate a cobot into the existing production system. Financial factors come quickly to mind, but this high saliency should not be confused with high importance and thus, financial considerations should not primarily drive decisions. Overall, success factors seem to be largely independent from the goal a company seeks to achieve by introducing a cobot. This eases the development of a widely generalizable framework of success factors.
Finally, we call for a greater alignment of HRI research on business needs, stressing the demand for studies outside the lab. Application-oriented research projects should foster bringing relevant research results in practice. This refers particularly to complex and interdependent topics like fear of job loss and (affective) trust, which heavily influence acceptance. Since there is often a thin line between perceiving a cobot as a mistrusted opponent or as a trustworthy supporting device, company managers should be aware of the underlying dynamics in order to be able to develop appropriate communication strategies, which are often missing in practice [117].
Further studies should examine whether and to what extent these subjective opinions correspond to objective data. Therefore, representative and systematic pre-post-studies before and after introducing a cobot are needed. This could also generate more precise future research directions, inform cobot designers, and enhance the practical impact of HRI research.
References
International Federation of Robotics (2019) World Robotics Report 2019 - Industrial Robots, Frankfurt
Steil JJ, Maier GW (2017) Kollaborative Roboter: universale Werkzeuge in der digitalisierten und vernetzten Arbeitswelt. In: Maier GW, Engels G, Steffen E (eds) Handbuch Gestaltung digitaler und vernetzter Arbeitswelten, Living reference work, continuously updated edition, vol 57. Springer, Berlin, pp 1–24
Schou C, Madsen O (2017) A plug and produce framework for industrial collaborative robots. Int J Adv Robot Syst 14:1–10. https://doi.org/10.1177/1729881417717472
Müller-Abdelrazeq SL, Schönefeld K, Haberstroh M, Hees F (2019) Interacting with collaborative robots—a study on attitudes and acceptance in industrial contexts. In: Korn O (ed) SOCIAL ROBOTS: Technological, societal and ethical aspects of human-robot, vol 4. SPRINGER NATURE, Berlin, pp 101–117
Giffi C, Wellener P, Dollar B et al (2018) 2018 Deloitte and The Manufacturing Institute skills gap and future of work study. Deloitte Insights, London
Wang Y, Ma H-S, Yang J-H, Wang KS (2017) Industry 4.0: a way from mass customization to mass personalization production. Adv Manuf 5:311–320. https://doi.org/10.1007/s40436-017-0204-7
Görke M, Blankemeyer S, Pischke D, Oubari A, Raatz A, Nyhuis P (2017) Sichere und akzeptierte Kollaboration von Mensch und Maschine. ZWF Zeitschrift für wirtschaftlichen Fabrikbetrieb 112:41–45. https://doi.org/10.3139/104.111668
Charalambous G, Fletcher SR, Webb P (2017) The development of a Human Factors Readiness Level tool for implementing industrial human-robot collaboration. Int J Adv Manuf Technol 91:2465–2475. https://doi.org/10.1007/s00170-016-9876-6
Meißner A, Trübswetter A (2018) Mensch-Roboter-Kollaboration in der Produktion: Kritische Würdigung etablierter Technikakzeptanzmodelle und neue Erkenntnisse in der Akzeptanzforschung. In: Weidner R, Karafillidis A (eds) Technische Unterstützungssysteme, die die Menschen wirklich wollen: Dritte transdisziplinäre Konferenz. Helmut-Schmidt-Universität, Hamburg, pp 223–233
Vincent J, Taipale S, Sapio B et al (2015) Social robots from a human perspective. Springer International Publishing, Cham
Savela N, Turja T, Oksanen A (2018) Social acceptance of robots in different occupational fields: a systematic literature review. Int J Soc Robot 10:493–502. https://doi.org/10.1007/s12369-017-0452-5
Horstmann AC, Bock N, Linhuber E, Szczuka JM, Straßmann C, Krämer NC (2018) Do a robot's social skills and its objection discourage interactants from switching the robot off? PLoS One 13:e0201581. https://doi.org/10.1371/journal.pone.0201581
Richert A, Müller SL, Schröder S, Jeschke S (2017) Anthropomorphism in social robotics: Empirical results on human–robot interaction in hybrid production workplaces. AI & Soc 1:71–80. https://doi.org/10.1007/s00146-017-0756-x
Hegenberg J, Schimpf DW, Fischer N et al (2019) Pilotstudie zur Roboterunterstützung des Menschen bei manueller Montage. In: Gesellschaft für Arbeitswissenschaft (ed) Arbeit interdisziplinär analysieren - bewerten - gestalten: 65. Kongress der Gesellschaft für Arbeitswissenschaft, GfA-Press, Dortmund, pp 1–6
Sabanovic S, Reeder S, Kechavarzi B (2014) Designing robots in the wild: in situ prototype evaluation for a break management robot. J Hum Robot Interact 3:70–88. https://doi.org/10.5898/JHRI.3.1.Sabanovic
Elprama SA, El Makrini I, Vanderborght B et al (2016) Acceptance of collaborative robots by factory workers: a pilot study on the importance of social cues of anthropomorphic robots. In: The 25th IEEE International Symposium on Robot and Human Interactive Communication, New York, pp 919–924
Jung MF, Hinds P (2018) Robots in the wild: a time for more robust theories of human-Robot interaction. ACM Trans Hum Robot Interact 7:1–5. https://doi.org/10.1145/3208975
Wen J, Stewart A, Billinghurst M et al (2018) He who hesitates is lost (…in thoughts over a robot). In: Proceedings of the Technology, Mind, and Society on ZZZ - TechMindSociety '18. ACM Press, New York, pp 1–6
Mutlu B, Roy N, Sabanovic S (2016) Cognitive human–robot interaction. In: Siciliano B, Khatib O (eds) Springer handbook of robotics, 2nd edn. Springer, Berlin Heidelberg, pp 1907–1934
Bauer A, Wollherr D, Buss M (2007) Human-robot collaboration: a survey. Int J Humanoid Rob 05:47–66. https://doi.org/10.1142/S0219843608001303
Cencen A, Verlinden JC, Geraedts JMP (2018) Design methodology to improve human-robot coproduction in small- and medium-sized enterprises. IEEE ASME Trans Mechatron 23:1092–1102. https://doi.org/10.1109/TMECH.2018.2839357
Murashov V, Hearl F, Howard J (2016) Working safely with robot workers: Recommendations for the new workplace. J Occup Environ Hyg 13:D61–D71. https://doi.org/10.1080/15459624.2015.1116700
International Organization for Standardization (2012) Robots and robotic devices—Vocabulary(ISO 8373:2012)
Bender M, Braun M, Rally P et al (2016) Leichtbauroboter in der manuellen Montage - einfach einfach anfangen: Erste Erfahrungen von Anwenderunternehmen. Fraunhofer IAO, Stuttgart
Aaltonen I, Salmi T, Marstio I (2018) Refining levels of collaboration to support the design and evaluation of human-robot interaction in the manufacturing industry. Procedia CIRP 72:93–98. https://doi.org/10.1016/j.procir.2018.03.214
Malik AA, Bilberg A (2019) Developing a reference model for human–robot interaction. Int J Interact Des Manuf 13:1541–1547. https://doi.org/10.1007/s12008-019-00591-6
Kopp T, Schäfer A, Kinkel S (2020) Kollaborierende oder kollaborationsfähige Roboter? Welche Rolle spielt die Mensch-Roboter-Kollaboration in der Praxis? I40M 2020: 19–23. https://doi.org/10.30844/I40M_20-2_S19-23
Dieber B, Schlotzhauer A, Brandstötter M (2017) Safety & security—Erfolgsfaktoren von sensitiven Robotertechnologien. e&i Elektrotechnik und Informationstechnik 134:299–303. https://doi.org/10.1007/s00502-017-0512-4
Gervasi R, Mastrogiacomo L, Franceschini F (2020) A conceptual framework to evaluate human-robot collaboration. Int J Adv Manuf Technol 108:841–865. https://doi.org/10.1007/s00170-020-05363-1
International Organization for Standardization (2016) Robots and robotic devices—Collaborative robots(ISO/TS 15066:2016)
Mateus JC, Claeys D, Limère V, Cottyn J, Aghezzaf EH (2019) A structured methodology for the design of a human-robot collaborative assembly workplace. Int J Adv Manuf Technol 102:2663–2681. https://doi.org/10.1007/s00170-019-03356-3
Bruno G, Antonelli D (2018) Dynamic task classification and assignment for the management of human-robot collaborative teams in workcells. Int J Adv Manuf Technol 98:2415–2427. https://doi.org/10.1007/s00170-018-2400-4
International Organization for Standardization (2011) Robots and robotic devices—Safety requirements for industrial robots — Part 1: Robots(ISO 10218-1:2011)
Papanastasiou S, Kousi N, Karagiannis P, Gkournelos C, Papavasileiou A, Dimoulas K, Baris K, Koukas S, Michalos G, Makris S (2019) Towards seamless human robot collaboration: integrating multimodal interaction. Int J Adv Manuf Technol 105:3881–3897. https://doi.org/10.1007/s00170-019-03790-3
Romero D, Stahre J, Wuest T et al (2016) Towards an operator 4.0 typology: a human-centric perspective on the fourth industrial revolution technologies. In: 46th International Conference on Computers & Industrial Engineering 2016, 29–31 October 2016:, Tianjin, China
Breazeal C (2004) Social Interactions in HRI: The robot view. IEEE Trans Syst Man Cybern Part C Appl Rev 34:181–186. https://doi.org/10.1109/TSMCC.2004.826268
Selevsek N, Köhler C (2018) Angepasste Planungssystematik für MRK-Systeme. ZWF Zeitschrift für wirtschaftlichen Fabrikbetrieb 113:55–58. https://doi.org/10.3139/104.111865
Grahn S, Gopinath V, Wang XV, Johansen K (2018) Exploring a model for production system design to utilize large robots in human-robot collaborative assembly cells. Procedia Manuf 25:612–619. https://doi.org/10.1016/j.promfg.2018.06.094
Ore F, Hansson L, Wiktorsson M (2017) Method for design of human-industrial robot collaboration workstations. Procedia Manuf 11:4–12. https://doi.org/10.1016/j.promfg.2017.07.112
Krüger J, Lien TK, Verl A (2009) Cooperation of human and machines in assembly lines. CIRP Ann 58:628–646. https://doi.org/10.1016/j.cirp.2009.09.009
Ranz F, Komenda T, Reisinger G, Hold P, Hummel V, Sihn W (2018) A morphology of human robot collaboration systems for industrial assembly. Procedia CIRP 72:99–104. https://doi.org/10.1016/j.procir.2018.03.011
Bradshaw JM, Feltovich PJ, Johnson M (2011) Human-agent interaction. In: Boy GA (ed) The handbook of human-machine interaction: a human-centered design approach. Ashgate, Surrey, pp 283–302
Unhelkar VV, Perez J, Boerkoel JC et al (2014) Towards control and sensing for an autonomous mobile robotic assistant navigating assembly lines. In: 2014 IEEE International Conference on Robotics and Automation (ICRA). IEEE, pp 4161–4167
Darvish K, Wanderlingh F, Bruno B, Simetti E, Mastrogiovanni F, Casalino G (2018) Flexible human–robot cooperation models for assisted shop-floor tasks. Mechatronics 51:97–114. https://doi.org/10.1016/j.mechatronics.2018.03.006
Peshkin M, Colgate E (1999) Cobots: United States Patent(5,952,796)
Haag M (2015) Kollaboratives Arbeiten mit Robotern—vision und realistische Perspektive. In: Botthof A, Hartmann EA (eds) Zukunft der Arbeit in Industrie 4.0. Springer Berlin Heidelberg, Berlin, pp 59–64
KUKA Roboter GmbH (2003) KR 6 - Technical Data, Spez LBR iiwa V7
KUKA Roboter GmbH (2016) LBR iiwa - LBR iiwa 7 R800, LBR iiwa 14 R820 Spezifikation, Spez LBR iiwa V7
Matheson E, Minto R, Zampieri EGG, Faccio M, Rosati G (2019) Human–robot collaboration in manufacturing applications: a review. Robotics 8. https://doi.org/10.3390/robotics8040100
Mazzocchi T, Diodato A, Ciuti G et al (2015) Smart sensorized polymeric skin for safe robot collision and environmental interaction. In: Burgard W (ed) 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS): 28 September - 2 October 2015, Hamburg, Germany. IEEE, Piscataway, pp 837–843
Blankemeyer S, Recker T, Stuke T, Brokmann J, Geese M, Reiniger M, Pischke D, Oubari A, Raatz A (2018) A Method to distinguish potential workplaces for human-robot collaboration. Procedia CIRP 76:171–176. https://doi.org/10.1016/j.procir.2018.02.008
Djuric AM, Urbanic RJ, Rickli JL (2016) A Framework for collaborative robot (CoBot) integration in advanced manufacturing systems. SAE Int J Mater Manuf 9:457–464. https://doi.org/10.4271/2016-01-0337
Oubari A, Pischke D, Jenny M, Meißner A, Trübswetter A (2018) Mensch-Roboter-Kollaboration in der Produktion. ZWF Zeitschrift für wirtschaftlichen Fabrikbetrieb 113:560–564
Baumgartner M, Kopp T, Kinkel S (2020) Industrielle Mensch-Roboter-Kollaboration in KMU: KMU unterschätzen das Potenzial der Mensch-Roboter-Interaktion. wt WerkstattsTechnik online 110: 146–150
Litzenberger G (2019) IFR publishes collaborative industrial robot definition and estimates supply. https://ifr.org/post/international-federation-of-robotics-publishes-collaborative-industrial-rob. Accessed 24 Jun 2020
Złotowski J, Proudfoot D, Yogeeswaran K, Bartneck C (2015) Anthropomorphism: opportunities and challenges in human–robot interaction. Int J Soc Robot 7:347–360
Darling K, Nandy P, Breazeal C (2015) Empathic concern and the effect of stories in human-robot interaction. In: 2015 24th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN): 31 August - 4 September 2015, Kobe, Japan. IEEE, Piscataway, pp 770–775
Brandstetter J (2017) The power of robot groups with a focus on persuasive and linguistic cues: Dissertation, University of Canterbury
Hinds PJ, Roberts TL, Jones H (2004) Whose job is it anyway? A study of human-robot interaction in a collaborative task. HCI 19:151–181
Heßler M (2019) Menschen – Maschinen – MenschMaschinen in Zeit und Raum. Perspektiven einer Historischen Technikanthropologie. In: Heßler M, Weber H (eds) Provokationen der Technikgeschichte. Verlag Ferdinand Schöningh, Paderborn, pp 35–68
McCarthy N (2019) Infographic: the countries facing the greatest skill shortages. https://www.statista.com/chart/4690/the-countries-facing-the-greatest-skill-shortages/. Accessed 24 Jun 2020
Skevi A, Szigeti H, Perini S et al (2014) Current skills gap in manufacturing: towards a new skills framework for factories of the future. In: Grabot B, Vallespir B, Gomes S et al (eds) Advances in Production Management Systems. Innovative and Knowledge-Based Production Management in a Global-Local World. Springer Berlin Heidelberg, Berlin, pp 175–183
Beckert B, Buschak D, Graf B et al (2016) Automatisierung und Robotik-Systeme: Studien zum deutschen Innovationssystem 11-2016, Fraunhofer ISI, Fraunhofer IPA, Karlsruhe
Malik AA, Bilberg A (2017) Framework to implement collaborative robots in manual assembly: a lean automation approach. In: Katalinic B (ed) Proceedings of the 28th International DAAAM Symposium, Zadar, DAAAM International, Vienna, pp 1151–1160
Eekels J, Roozenburg NFM (1991) A methodological comparison of the structures of scientific research and engineering design: their similarities and differences. Des Stud 12:197–203. https://doi.org/10.1016/0142-694X(91)90031-Q
Frennert S (2019) A Human Factor Approach to HRI. In: Salichs MA, Ge SS, Barakova EI et al (eds) Social Robotics. Springer International Publishing, Cham, pp 311–321
Eklund J (2003) An extended framework for humans, technology and organization in interaction. In: Luczak H, Zink KJ (eds) Human factors in organizational design and management - VII: Re-designing work and macroergonomics—future perspectives and challenges ; proceedings of the Seventh International Symposium on Human Factors in Organizational Design and Management held in Aachen, Germany, 1–2 October 2003. IEA Press, Mainz, Aachen, pp 47–60
Meißner A, Trübswetter A (2018) Kollaborierende Roboter in der Produktion - Akzeptanz durch die Beschäftigten. Betriebspraxis & Arbeitsforschung 233:24–27
Müller-Abdelrazeq SL (2020) Triadisches Phasenmodell des Zusammenspiels von Einstellungssubjekt, -objekt und -kontext bei der industriellen Mensch-Roboter-Interaktion. Apprimus Verlag, Aachen
International Organization for Standardization (2016) Ergonomics principles in the design of work systems(ISO 6385:2016)
International Organization for Standardization (2019) Ergonomics of human-system interaction—Part 210: Human-centred design for interactive systems(ISO 9241-210:2019)
Moniz A (2014) Organisational challenges of human–robot interaction systems in industry: human resources implications. In: Machado C, Davim JP (eds) Human resource management and technological challenges. Springer, Cham, pp 123–131
Bröhl C, Nelles J, Brandl C, Mertens A, Nitsch V (2019) Human–robot collaboration acceptance model: development and comparison for Germany, Japan, China and the USA. Int J Soc Robot 130:42–59. https://doi.org/10.1007/s12369-019-00593-0
Davis F (1989) Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q 13:319. https://doi.org/10.2307/249008
Ghazizadeh M, Lee JD, Boyle LN (2012) Extending the technology acceptance model to assess automation. Cogn Tech Work 14:39–49. https://doi.org/10.1007/s10111-011-0194-3
Bröhl C, Nelles J, Brandl C et al. (2017) Entwicklung und Analyse eines Akzeptanzmodells für die Mensch-Roboter-Kooperation in der Industrie
Bröhl C, Nelles J, Brandl C et al (2016) TAM reloaded: a technology acceptance model for human-robot cooperation in production systems. In: Stephanidis C (ed) HCI International 2016 - posters' extended abstracts: 18th international conference, HCI International 2016, Toronto, Canada, July 17-22, 2016 : proceedings, vol 617. Springer, Cham, pp 97–103
Lotz V, Himmel S, Ziefle M (2019) You're my mate-acceptance factors for human-robot collaboration in industry. In: Dimitrov D, Hagedorn-Hansen D, von Leipzig K (eds) International Conference on Competitive Manufacturing (COMA 19), 31 January - 2 February 2019, Stellenbosch, South Africa. Department of Industrial Engineering, Stellenbosch University, Stellenbosch, pp 405–411
European Union (2003) Commission recommendation of 6 May 2003 concerning the definition of micro, small and medium-sized enterprises. Official Journal of the European Union, Brussels
Rohrmann B (1978) Empirische Studien zur Entwicklung von Antwortskalen für die sozialwissenschaftliche Forschung. Zeitschrift für Sozialpsychol 9:222–245
International Organization for Standardization (2011) Robots and robotic devices—safety requirements for industrial robots—Part 2: Robot systems and integration(ISO 10218-2:2011)
International Organization for Standardization (2010) Safety of machinery—general principles for design—risk assessment and risk reduction(ISO 12100:2010)
Saenz J, Behrens R, Schulenburg E, Petersen H, Gibaru O, Neto P, Elkmann N (2020) Methods for considering safety in design of robotics applications featuring human-robot collaboration. Int J Adv Manuf Technol 107:2313–2331. https://doi.org/10.1007/s00170-020-05076-5
Marvel JA, Falco J, Marstio I (2015) Characterizing task-based human–robot collaboration safety in manufacturing. IEEE Trans Syst Man Cybern Syst 45:260–275. https://doi.org/10.1109/TSMC.2014.2337275
International Organization for Standardization (2012) Safety of machinery—risk assessment—Part 2: Practical guidance and examples of methods(ISO/TR 14121-2:2012)
International Organization for Standardization (2015) Safety of machinery—safety-related parts of control systems—Part 1: General principles for design(ISO 13849-1:2015)
European Parliament; Council of the European Union (2006) Directive 2006/42/EC of the European parliament and of the council of 17 May 2006 on machinery, and amending Directive 95/16/EC (recast)
Faber M, Bützler J, Schlick CM (2015) Human-robot cooperation in future production systems: analysis of requirements for designing an ergonomic work system. Procedia Manuf 3:510–517. https://doi.org/10.1016/j.promfg.2015.07.215
Robla-Gomez S, Becerra VM, Llata JR, Gonzalez-Sarabia E, Torre-Ferrero C, Perez-Oria J (2017) Working together: a review on safe human-robot collaboration in industrial environments. IEEE Access 5:26754–26773. https://doi.org/10.1109/ACCESS.2017.2773127
You S, Kim J-H, Lee S, Kamat V, Robert LP Jr (2018) Enhancing perceived safety in human–robot collaborative construction using immersive virtual environments. Autom Constr 96:161–170. https://doi.org/10.1016/j.autcon.2018.09.008
Maurtua I, Ibarguren A, Kildal J, Susperregi L, Sierra B (2017) Human–robot collaboration in industrial applications. Int J Adv Robot Syst 14:1–10. https://doi.org/10.1177/1729881417716010
Weiss A, Huber A, Minichberger J, Ikeda M (2016) First application of robot teaching in an existing industry 4.0 Environment: Does It Really Work? Societies 6:1–21. https://doi.org/10.3390/soc6030020
Oliveira R, Arriaga P, Alves-Oliveira P et al (2018) Friends or foes? In: Kanda T, Sabanovic S, Hoffman G et al (eds) Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction - HRI '18. ACM Press, New York, pp 279–288
Granulo A, Fuchs C, Puntoni S (2019) Psychological reactions to human versus robotic job replacement. Nat Hum Behav 3:1062–1069. https://doi.org/10.1038/s41562-019-0670-y
Salvini P, Laschi C, Dario P (2010) Design for acceptability: improving robots’ coexistence in human society. Int J Soc Robot 2:451–460. https://doi.org/10.1007/s12369-010-0079-2
Acemoglu D, Restrepo P (2019) Robots and jobs: evidence from US labor markets. J Polit Econ 128:2188–2244. https://doi.org/10.1086/705716
Sauppé A, Mutlu B (2015) The social impact of a robot co-worker in industrial settings. In: Kim J (ed) CHI 2015 crossings: CHI 2015 ; proceedings of the 33rd Annual CHI Conference on Human Factors in Computing Systems ; April 18 - 23, 2015, Seoul, Republic of Korea. ACM, New York, pp 3613–3622
Charalambous G, Fletcher S, Webb P (2015) Identifying the key organisational human factors for introducing human-robot collaboration in industry: an exploratory study. Int J Adv Manuf Technol 81:2143–2155. https://doi.org/10.1007/s00170-015-7335-4
Sadrfaridpour B, Wang Y (2018) Collaborative assembly in hybrid manufacturing cells: an integrated framework for human–robot interaction. IEEE Trans Autom Sci Eng 15:1178–1192. https://doi.org/10.1109/TASE.2017.2748386
Broadbent E (2017) Interactions With Robots: The truths we reveal about ourselves. Annu Rev Psychol 68:627–652. https://doi.org/10.1146/annurev-psych-010416-043958
Charalambous G, Fletcher S, Webb P (2013) Human-automation collaboration in manufacturing: identifying key implementation factors. In: Proceedings of the 11th International Conference on Manufacturing Research (ICMR2013), Cranfield University, UK, 19–20 September 2013, pp 301–306
Hoff KA, Bashir M (2015) Trust in automation: integrating empirical evidence on factors that influence trust. Hum Factors 57:407–434. https://doi.org/10.1177/0018720814547570
French B, Duenser A, Heathcote A (2018) Trust in Automation - A Literature Review report. CSIRO, Clayton Victoria
de Visser EJ, Peeters MMM, Jung MF, Kohn S, Shaw TH, Pak R, Neerincx MA (2019) Towards a theory of longitudinal trust calibration in human–robot teams. Int J Soc Robot 8:459–478. https://doi.org/10.1007/s12369-019-00596-x
Phillips EK, Ososky S, Grove J, Jentsch F (2011) From tools to teammates: toward the development of appropriate mental models for intelligent robots. Proc Hum Factors Ergon Soc Annu Meet 55:1491–1495. https://doi.org/10.1177/1071181311551310
Lewis M, Sycara K, Walker P (2018) The role of trust in human-robot interaction. In: Abbass HA, Scholz J, Reid DJ (eds) Foundations of Trusted Autonomy. Springer International Publishing, Cham, pp 135–160
Wullenkord R, Fraune MR, Eyssel F et al (2016) Getting in touch: how imagined, actual, and physical contact affect evaluations of robots. In: 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 26-31 August 2016, Columbia University NY, IEEE, Piscataway, pp 980–985
Flook R, Shrinah A, Wijnen L, Eder K, Melhuish C, Lemaignan S (2019) Social Cues in Robot Interaction, Trust and Acceptance. IS 20:455–486. https://doi.org/10.1075/is.18067.flo
Desai M, Kaniarasu P, Medvedev M et al (2013) Impact of robot failures and feedback on real-time trust. In: HRI 2013: Proceedings of the 8th ACM/IEEE International Conference on Human-Robot Interaction. IEEE, Piscataway, pp 251–258
Parasuraman R, Riley V (1997) Humans and automation: use, misuse, disuse, abuse. Hum Factors 39:230–253. https://doi.org/10.1518/001872097778543886
Gompei T, Umemuro H (2018) Factors and development of cognitive and affective trust on social robots. In: Ge SS (ed) Social robotics: 10th International Conference, ICSR 2018, Qingdao, China, 28–30 November 2018, proceedings, vol. 11357. Springer, Cham, pp 45–54
Turja T, Oksanen A (2019) Robot acceptance at work: a multilevel analysis based on 27 EU countries. Int J Soc Robot 11:679–689. https://doi.org/10.1007/s12369-019-00526-x
Finch H (2005) Comparison of the performance of nonparametric and parametric MANOVA test statistics when assumptions are violated. Methodology 1:27–38. https://doi.org/10.1027/1614-1881.1.1.27
Elkmann N, Berndt D, Leye S, Richter K, Mecke R (2015) Arbeitssysteme der Zukunft. In: Schenk M (ed) Produktion und Logistik mit Zukunft. Springer, Berlin Heidelberg, Berlin, Heidelberg, pp 49–149
Russwurm S (2013) Software: Die Zukunft der Industrie. In: Sendler U (ed) Industrie 4.0. Springer Berlin Heidelberg, Berlin, pp 21–36
Li D, Rau PLP, Li Y (2010) A Cross-cultural study: effect of robot appearance and task. Int J Soc Robot 2:175–186. https://doi.org/10.1007/s12369-010-0056-9
Vanderborght B, Berte J, de Coppel G et al (2017) Towards an acceptable socially collaborative robot for the manufacturing industry. In: ICRA workshop IC3 - Industry of the future: Collaborative, Connected, Cognitive: Novel approaches stemming from Factory of the Future & Industry 4.0 initiatives, Singapore, pp 1–2
Acknowledgments
We thank Tobias Kunkel for his valuable suggestions regarding the design of the online study as well as all of the participants in our online survey.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Kopp, T., Baumgartner, M. & Kinkel, S. Success factors for introducing industrial human-robot interaction in practice: an empirically driven framework. Int J Adv Manuf Technol 112, 685–704 (2021). https://doi.org/10.1007/s00170-020-06398-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-020-06398-0