
Abstract
High latitude drainage basins are experiencing higher average temperatures, earlier snowmelt onset in spring, and an increase in rain on snow (ROS) events in winter, trends that climate models project into the future. Snowmelt-dominated basins are most sensitive to winter temperature increases that influence the frequency of ROS events and the timing and duration of snowmelt, resulting in changes to spring runoff. Of specific interest in this study are early melt events that occur in late winter preceding melt onset in the spring. The study focuses on satellite determination and characterization of these early melt events using the Yukon River Basin (Canada/USA) as a test domain. The timing of these events was estimated using data from passive (Advanced Microwave Scanning RadiometerâEOS (AMSR-E)) and active (SeaWinds on Quick Scatterometer (QuikSCAT)) microwave remote sensors, employing detection algorithms for brightness temperature (AMSR-E) and radar backscatter (QuikSCAT). The satellite detected events were validated with ground station meteorological and hydrological data, and the spatial and temporal variability of the events across the entire river basin was characterized. Possible causative factors for the detected events, including ROS, fog, and positive air temperatures, were determined by comparing the timing of the events to parameters from SnowModel and National Centers for Environmental Prediction North American Regional Reanalysis (NARR) outputs, and weather station data. All melt events coincided with above freezing temperatures, while a limited number corresponded to ROS (determined from SnowModel and ground data) and a majority to fog occurrence (determined from NARR). The results underscore the significant influence that warm air intrusions have on melt in some areas and demonstrate the large temporal and spatial variability over years and regions. The study provides a method for melt detection and a baseline from which to assess future change.

Content from this work may be used under the terms of the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 licence. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
1. Introduction
Alaskan winters have warmed by 3.5â°C over the past 50 years, almost twice that of the annual average temperature increase (Karl et al 2009). Observations and climate models have found greater warming in winter, and projections suggest changes in winter will continue (Hay and McCabe 2010). The late winter and early spring period in the Arctic is significant due to its control on the initiation of ecological and hydrological processes and shifts to earlier melt and green-up dates are already being experienced and expected in the future (Serreze et al 2000, Cayan et al 2001, Stone et al 2002, Schwartz et al 2006, Wang et al 2011). Additionally, the late spring is important for surface energy budgets because of changes in albedo and solar radiation that result in higher outgoing shortwave radiation than other seasons and for the large amounts of latent heat required to melt snow (Male and Granger 1981, Cohen 1994). Of particular significance during this period are early melt events, defined here as short-lived melt events detected with remotely sensed passive microwave brightness temperatures that occur before the relatively continuous spring melt onset. A typical seasonal sub-arctic snow cycle starts with snow fall and accumulation throughout late fall and winter until temperatures rise and are consistently around or above the freezing point in mid to late spring when the snowpack melts during the day and refreezes at night when temperatures drop. This usually lasts for several days to weeks until temperatures at night are higher and the snowpack becomes isothermal, saturated and actively melts day and night until the surface is snow free. Early melt events occur before this melt cycle begins in the spring and are much shorter events (one or a few days), usually a result of brief warm temperatures, warm moist air (fog) or rain on snow.
While developing an algorithm for determining the spring melt onset with passive microwave data, the earlier, short term events were noticed and hypothesized to impact the structure of the snowpack, create ice lenses, and affect melt runoff. However, little is known of the events' characteristics or effects, leading to such questions as: what are the influencing or causative factors? Are these events increasing in number, area, and frequency? What is their spatial and temporal variability? In order to investigate these questions, we considered satellite detected early melt events for the Yukon River Basin for the period 2003â2009. We utilized multiple datasets (ground station data, model data, and remote sensed data) in order to validate the detections, as well as to explore possible causes. Results illustrate the spatial and temporal variability of melt events and highlight the need for future study on the significance of the effects of these events, especially with increasing temperatures amplifying changes in late winter when these events tend to occur.
It is hypothesized that the satellite detected melt events can be explained by rain on snow (ROS), melt from warm air mass intrusions resulting in positive net turbulent flux, or melting of the snowpack due to temperature and radiative heating. ROS events have previously been investigated in the literature and found to have significant biological, hydrological, and ecological impacts (Putkonen and Roe 2003, Ye et al 2008, Grenfell and Putkonen 2008, Rennert et al 2009, Bartsch et al 2010, Hansen et al 2011). Biologically, ROS events can result in ungulate (caribou, musk oxen, reindeer) mortality because the ability to effectively forage is impeded by ice layers that can require costly energy expenditures (Aanes et al 2000, Grenfell and Putkonen 2008, Putkonen et al 2009, Rennert et al 2009). Hydrologically, rain on snow can lead to severe flooding. The ice layers serve as impediments that double snowpack storage capacity (liquid water holding capacity is about 14.2% near ice layers compared to an average capacity of 6.8%) and the snowpack's high conductivity (due to saturation and preferential flow paths) produces high discharge (Singh et al 1997). The latent heat carried by rain not only heats snow and creates melt, it also raises the underlying soil temperature impacting the permafrost heat budget (if the amount of rain is large enough) due to the reduction of the insulative properties of the snowpack (Putkonen and Roe 2003, Grenfell and Putkonen 2008, Rennert et al 2009, Westermann et al 2011). This modification of winter soil temperature may have consequences for the annual hydrological cycle (Grenfell and Putkonen 2008) and may have long-lasting impacts on permafrost degradation and maximum thaw depth (Westermann et al 2011).
Ecologically, ROS events have been found to be a significant source of stream NO3-N during the winter, resulting in acidic downstream waters impacting aquatic biota and in recent years, the portion of the annual NO3-N export has increased (Eimers et al 2007). This coincides with an increase in frequency and extent of ROS occurrences in many Arctic and sub-arctic areas (Rennert et al 2009, Bartsch et al 2010, Liston and Hiemstra 2011). Liston and Hiemstra (2011) modeling results of domain averaged trends in the past 30 years (1979â2009) found decreasing snow and increasing rain on snow throughout the Arctic, with rain on snow days increasing by 0.03 days per decade, total snow days decreasing 2.49 days per decade, and air temperature (with snow on the ground) increasing by 0.17â°C per decade. As air temperatures increase in the future, ROS events are projected to be more frequent, have a wider spatial extent, and become common in areas they are now rare (Ye et al 2008, Rennert et al 2009, Hansen et al 2011). A typical global climate model scenario projects a 40% increase in the area affected by ROS by 2080â2089, driven by winter warming and trends toward positive North Atlantic Oscillation (NAO) phase associated with warm air incursions (Putkonen and Roe 2003).
The significant effects of and the projected future increase in ROS events motivate research into their causes and characteristics, however, studying ROS events is challenging due to their sporadic occurrence, and the need for consistent and wide coverage meteorological data and accurate rain and snow measurements (Grenfell and Putkonen 2008). While most evidence is anecdotal, several studies have attempted to characterize ROS events using station data, reanalysis datasets, and climate models (Rennert et al 2009). There are disadvantages to each approach including sparse coverage, difficulty in determining precipitation in cold regions, and spatial resolution and scale issues (Rennert et al 2009).
Satellite data have also been used; specifically, Grenfell and Putkonen (2008) used Special Sensor Microwave Imager (SSMI) data and an emissivity model to detect the stages of ROS with spectral gradients and polarization ratios. The ROS events were characterized by a low gradient ratio and large polarization ratio compared to the normal snowpack conditions (Grenfell and Putkonen 2008). During the ROS event, a rapid change in emissivity and temperature occurs initially and is followed by the freezing of liquid with a persistent Tb signature from the formation of ice layers and grain size change that may last until melt onset in the spring (Grenfell and Putkonen 2008).
Though similar to Grenfell and Putkonen (2008)'s previous study, the research presented here utilizes higher resolution passive microwave data from the Advanced Microwave Scanning RadiometerâEarth Observing System (AMSR-E) which has 12.5 km spatial resolution compared to SSMI's 25Â km. In addition, the algorithm and method for melt detection differs between the two studies; here detection depends on melt thresholds and diurnal amplitude variation changes in conjunction with a backscatter change detection approach using QuikSCAT active microwave data, while Grenfell and Putkonen (2008) utilize a ratio approach. Further, our study strives to provide a better understanding of all early melt events (not just ROS), providing a spatially and temporally distributed picture of the variability and significance of these events across the Yukon River Basin in Alaska.
Better characterization of early melt events and ROS is important for improving modeling and algorithm performance. Streamflow and flood prediction may be improved through the estimation of timing and volume of runoff from ROS events (Singh et al 1997, McCabe et al 2007). Runoff from the snowpack is affected by surface melt, movement of water through the pack (preferential flow paths), infiltration into the soil, overland flow, and snow metamorphism (Singh et al 1997). The transit time from melt at the surface to the base of the pack can be estimated from simple continuity reasoning, however, meltwater flux moves more slowly when refreezing has taken place (Bengtsson 1982), a significant consideration for modeling of runoff. Although ROS events are more likely to cause severe flooding than short melt events induced radiatively (Kattelmann 1985), melting of the snowpack without ROS also has significant effects, changing the structure of snowpack stratigraphy and volume storage capacity, possibly affecting runoff dynamics. Additionally, the operational algorithms for passive microwave satellite data products (snow water equivalent) may be impacted by melt events in mid-winter and should be considered (Rees et al 2010).
2. Study area
The analysis focuses on the Yukon River Basin (YRB) for the time period 2003â9 when both AMSR-E and QuikSCAT data are available. The YRB (figure 1) is one of the largest basins in North America; it drains 853â300 km2 and stretches from northwestern Canada through central Alaska, covering several ecoregions and land cover types, and encompasses a range of elevations (Brabets et al 2000). The majority of the basin can be characterized by a sub-arctic nival regime with snowmelt driving runoff (Brabets et al 2000, Woo et al 2008). For the YRB, future climate modeling studies suggest earlier snowmelt timing of longer duration, the largest positive temperature changes in winter, and increased runoff with the largest changes in May, June, and July (Hay and McCabe 2010). Given the projections for significant change in the critical time of late winter prior to melt onset, the YRB is an ideal study area for focusing on the occurrence and variability of early melt events.
3. Data and methods
To detect and validate events, several datasets were utilized, including passive and active microwave data, model output from SnowModel (Liston and Hiemstra 2011), variables from the National Centers for Environmental Prediction (NCEP) North American Regional Reanalysis (NARR) (Mesinger et al 2006), and weather station data for some specific sites.
3.1. Passive microwave data
Brightness temperature (Tb) data from the Advanced Microwave Scanning Radiometer-Earth Observing System (AMSR-E) on the Aqua satellite (Ashcroft and Wentz 2006) was used to determine when and where surface melt occurred. Water in the snowpack increases the emissivity which results in a significant difference in Tb between wet and dry snow (Chang et al 1976, Ulaby et al 1986). Further, the bulk permittivity of snow is modified by rain on snow, resulting in a change in Tb that can be measured by passive microwaves (Grenfell and Putkonen 2008). Using the 36.5 GHz vertical channel due to its sensitivity to snow wetness (Ramage et al 2006) and relatively higher spatial resolution (14 × 8 km2 resolution which is gridded as 12.5 km pixels in the NSIDC Equal-Area Scalable Earth (EASE) grid), melt onset was determined as the first date when Tb was greater than 252 K and the diurnal amplitude variation (DAV), or difference between the ascending and descending passes, was greater than 18 K for three of five consecutive days. These thresholds have been previously determined and validated in the YRB (Apgar et al 2007). Typically melt onset is followed by a period of high DAV where the snowpack is melting during the day and refreezing at night. At the end of this meltârefreeze period, or high DAV, the snowpack may be actively melting both day and night until snow disappearance. Figure 2 illustrates these melt timing parameters.
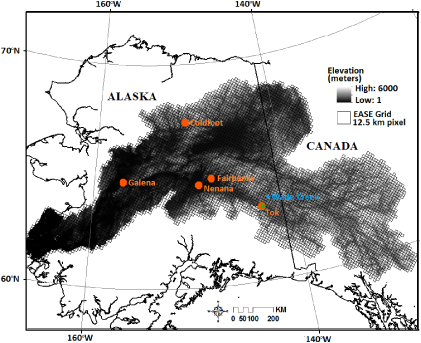
Figure 1. Overview of the Yukon River Basin study area with elevation and EASE-grid. Locations of ground station sites mentioned in the text are marked with orange circles. The pixel illustrated in figure 2 at Tok is marked green and the hydrological data used in figure 2 comes from Wade Creek marked blue. Topographic data (1:250â000 scale) is from Long and Brabets (2002).
Download figure:
Standard imageFor early melt event detection, the time period of analysis was constrained to between the first of the year and the melt onset date derived from the passive microwave data (described in the section above). Similar to the melt onset determination, early melt events were defined when the Tb was greater than 252 K and DAV was greater than 10 K. A lower DAV threshold (10 K) was employed for the early melt event detection because visual inspection of the data showed some definitive events were missed due to the DAV threshold being too high (supplementary material, figure S1 available at stacks.iop.org/ERL/8/014020/mmedia). Other algorithms were tested but not used, including utilizing the 18.7 GHz wavelength (more sensitive to deeper melt infiltration and noisier than 36.5 GHz in the DAV signal), as well as a single channel polarization difference previously suggested for the detection of ice lenses (Rees et al 2010).
3.2. Active microwave data
Melt events prior to melt onset (the start of the meltârefreeze period leading to continuous melt) were also determined from the active microwave sensor SeaWinds on QuikSCAT (13.4 GHz, Ku-band). SeaWinds scatterometer data (Jet Propulsion Laboratory) were processed and gridded to a 12.5 km regular grid as described in Kidd et al (2003, 2005), Bartsch et al (2007, 2010). An increase in backscatter reflects a refreezing/icing event, while surface melt results in a drop in backscatter up to â6 decibels (dB) (Bartsch et al 2010). Given these characteristics, a change detection approach considers days before and after the event. Specifically, a date was determined as a thaw and refreeze event when the difference in the mean daily backscatter of the three days before and after the date exceeded 1.5 dB, a threshold previously validated from ground observations on Yamal Peninsula, Russia, as explained in Bartsch et al (2010). Wilson et al (2012) successfully used this methodology to determine frequency and extent of icing/thawârefreeze events across Alaska.
3.3. Passive and active microwave data
In this study early melt events were detected using both the AMSR-E detection algorithm (section 3.1) and the QuikSCAT change detection algorithm (section 3.2). Specifically, the QuikSCAT freezeâthaw detections were used to validate and filter the AMSR-E detected events5, so that the determination of an early melt event occurred when both sensors' thresholds were met. Due to this combination of the passive and active sensors, the early melt events results should be viewed as conservative estimates. QuikSCAT is highly sensitive to snow wetness and can map actively melting areas, while AMSR-E (at 36.5 GHz) is sensitive to surface melt and distinguishes between dry and wet snow (Foster et al 2011). Both sensors were used in this study to provide more confidence in the detection of melt events. Because the AMSR-E DAV threshold was lowered (to 10 K from 18 K) in order to make the algorithm more sensitive for detecting the short, early melt events, there resulted in an overestimation of events which was countered by also requiring the QuikSCAT detection to be met. Refer to the supplementary material (available at stacks.iop.org/ERL/8/014020/mmedia) for more on the comparison between the two sensors. Previous studies have used QuikSCAT and AMSR-E data to complement each other for melt onset detection in order to reduce uncertainty and improve detection of snow cover and melt (Foster et al 2011). Combining AMSR-E and QuikSCAT has also been found to improve sea ice mapping (Yu et al 2009).
3.4. Model derived snow dataset
Detected early melt events were compared with air temperature (2Â m), precipitation, and snow water equivalent (SWE) depth spatially distributed variables from the dataset derived from the SnowModel and MicroMet modeling system described in Liston and Hiemstra (2011). This is a physically based model that relies on topographic data (1Â km DEM), land cover data (hybrid dataset of GlobCover and Circumpolar Arctic Vegetation Map), and atmospheric forcing data (NASA Modern Era Retrospective-Analysis for Research and Applications or MERRA) (Liston and Hiemstra 2011, and references therein). Rain on snow (ROS) is generated as a secondary product from the primary data fields. The model derived variables are on a 10Â km grid, a finer resolution than typical climate models, allowing for snow evolution process representation to be improved. This grid resolution is also relatively comparable to the EASE-grid scale used to map the AMSR-E data (12.5Â km). SnowModel has been previously authenticated and there is confidence in the representativeness of the simulated snow data products (Liston and Hiemstra 2011). The model is used here for validation and attribution of the satellite detections of melt and is viewed as a conservative estimate of rain on snow.
3.5. NCEP North American Regional Reanalysis (NARR)
NCEP NARR data, including air temperature (2 m), dew point temperature, visibility, and relative humidity, were used to determine the occurrence of fog. Fog was defined when the difference between air temperature and dew point temperature was less than 2.5â°C, or when relative humidity was greater than 98%, or when visibility was less than 1000 km (AMS 2000, OFCM 2005). NARR data are on a 349 × 277 (0.3° or 32 km) grid and were re-sampled (nearest neighbor technique) to the 12.5 km EASE-Grid to compare to the AMSR-E data.
The relatively moister and warmer conditions forming fog are considered to affect snow and melting. Snowmelt is accelerated with condensation melt associated with warm, moist air mass intrusions that result in higher melt rates than those produced from radiation or sensible heat alone (Zuzel et al 1983). Additionally, snowmelt during ROS is sensitive to net turbulent flux (sensible and latent heat flux) which provides over three-fourths of the energy for snowmelt (Marks et al 1998). Condensation on the snow surface from high humidity, air temperatures, and winds results in enhanced snowmelt (Marks et al 1998).
3.6. Meteorological and hydrological data
Meteorological and hydrological data for several pixels were used to validate early snowmelt detection and model results. Temperature, precipitation, and snow depth variables were obtained from the National Climate Data Center's global summary of the day data for several sites, including Coldfoot, Galena, Nenana, and Fairbanks, Alaska. Air temperature and snow depth for some sites (Tok) are from the USDA Natural Resources Conservation Service Soil Climate Analysis Network (SCAN). Discharge data were obtained from the USGS National Water Information System. The available data were compared to time series of satellite brightness temperatures and backscatter and the detections of melt. For example, some stations had precipitation and snow depth allowing melt events detected by satellite to be corroborated with rain on snow. Only Tok and Galena data are shown in the results section in the interest of space.
3.7. Data limitations and uncertainties
There are several limitations and uncertainties to consider in the datasets utilized in this study. The remote sensing data products are limited by spatial resolution and scale issues. There is considerable sub-grid variability within a pixel footprint for both sensors. Since the interest of the study is the timing of melt and the signal is significant and distinct in both the emissivity increase (for passive microwave sensors) and backscatter drop (for active microwave sensors), the determination of melt timing is assumed to have a large signal to noise ratio enabling adequate detection amid contributions from sub-grid variability due to vegetation and topography. However, these factors do contribute some uncertainty to the datasets. Noise contributed from the instrument, azimuth effects, irregular sampling, and land cover heterogeneity are in general minimal for the QuikSCAT backscatter signal (Bartsch et al 2007). Differing overpass times are assumed negligible since data from QuikSCAT is a daily average of multiple retrievals and data from AMSR-E is averaged to two daily averages (one for morning and night) to calculate DAV. Additionally, while the original gridded data for each of the datasets is relatively similar (10 km for SnowModel and 12.5 km for AMSR-E and QuikSCAT) there is uncertainty introduced when scaling to the 12.5 km grid utilized for the analysis. Uncertainty is also introduced when comparing a single point ground station data to a 12.5 km pixel. The ground station and SnowModel datasets in general agree well, especially with regard to air temperature and presence of snowpack. SnowModel was rigorously validated against multiple data sources and found to be a good representation of the Arctic climatology (Liston and Hiemstra 2011). However, these SnowModel simulations do have some limitations including assumptions of static vegetation distribution and one way atmospheric forcing, as well as not including blowing snow processes. The NARR dataset represents an improved depiction of hydrology and landâatmosphere interaction compared to other reanalyses, because of its more accurate forcings to the land surface model, higher resolution, and direct assimilations of variables such as radiance (Mesinger et al 2006). However, like all (re)analysis products it is limited by its numerical approximations of physical and dynamical processes and the data it assimilates.
4. Results
To illustrate the occurrence and validity of early melt events, time series of several of the datasets used in this study are shown in figure 2 for 2003 and 2009 for a pixel encompassing Tok, Alaska where meteorological and hydrological data were available. Both QuikSCAT and AMSR-E detected an early melt event around January 19 (day 19) in 2009 while there was no early melt event in 2003. The 2009 melt event coincided with a rain on snow occurrence in SnowModel and above freezing air temperature data from the SCAN site at Tok. Of note is the increase in discharge relative to the mean immediately after the end of the associated high DAV (green line) in 2009 which is not seen in 2003. Early melt events or ROS events were not found for this pixel in the other years investigated (2004â2008). Compared to 2003, 2009 had a longer meltârefreeze period (20 days compared to 13 in 2003), primarily a result of the melt onset date being earlier (day 95 compared to day 100 in 2003). The end of meltârefreeze is relatively the same (115 for 2009 and 113 for 2003). In 2003, there were several periods of warmer temperatures prior to melt onset that were not significant enough to meet the melt thresholds. It should be noted that the air temperatures are daily averages at the 2 m level and so are not an exact (but rather a proximate) indication of surface temperatures.
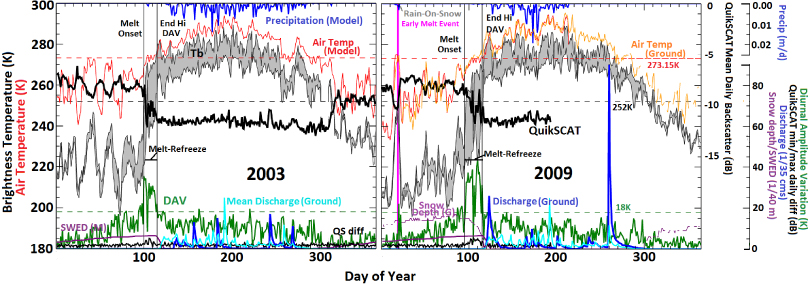
Figure 2. Time series of multiple datasets for a 12.5 km EASE-grid pixel encompassing Tok, Alaska (63.3216°N, 143.109°W). Left panel shows 2003âa year when there were no early melt events. Right panel shows 2009âa year of a rain on snow associated early melt event (pink vertical line). AMSR-E brightness temperatures are shaded gray and diurnal amplitude variation green. Solid black line is the mean daily backscatter (dB) from QuikSCAT and the thin bottom black line is the daily difference in minimum and maximum backscatter. Precipitation (top blue), air temperature (red), and SWE depth (dark purple) are from SnowModel. Air temperature (orange) and snow depth (light purple) are from the USDA Natural Resources Conservation Service Soil Climate Analysis Network (SCAN). Discharge (bottom dark blue with mean as cyan) is from Wade Creek Tributary near Chicken site 15320100 (see figure 1). Melt timing parameters (onset, meltârefreeze, end of high DAV) are shown with vertical black lines and labels.
Download figure:
Standard imageTo show further validation of the satellite detected melt events, figure 3 shows time series of brightness temperatures and ground station data for a pixel that encompasses Galena, Alaska. The ground station data corroborate two melt events detected by the sensor in 2003 as rain on snow. In 2006, a satellite detected melt event was not associated with rain on snow and most likely was due to fog or a warm air mass in the area. SnowModel matched the ground and satellite results in 2006 but not in 2003, highlighting the utility of combining approaches rather than just relying solely on one or the other. Other ground station locations were investigated (see figure 1 for locations) but the results are similar and not shown in the interest of space.
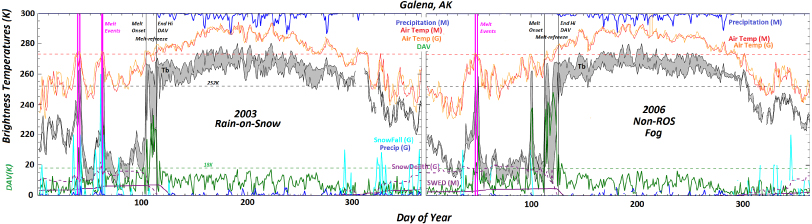
Figure 3. Time series of multiple datasets for a 12.5 km EASE-grid pixel encompassing Galena, Alaska (64.7406°N, 156.8856°W) for 2003 (left) a year with two early melt events associated with rain on snow as corroborated by ground station data of precipitation (bottom dark (rain) and light (snow) blue) and snow depth (bottom dashed purple line) and for 2006 (right) a year with one early melt event associated with fog (no rain on snow). Ground station data is from the Global Historical Climatology NetworkâDaily (USC00503212). Brightness temperature is shaded gray, DAV is green, air temperature from SnowModel is red and from ground station data is orange, precipitation from SnowModel is top blue line, SWE depth from SnowModel is bottom solid purple line. Early melt events are pink lines and melt timing (onset and refreeze) are black, labeled vertical lines.
Download figure:
Standard imageFollowing the multiple dataset and pixel validation of the early melt event algorithm, the algorithm was applied to the entire Yukon River basin to observe the spatial and temporal variation of early melt days. Figure 4 shows the range of early melt days for 2008 and representative pixel time series for areas with a relatively large number of melt days (5â6) compared to a relatively small number of melt days (1â2) and to no early melt days. Early melt days appear to coincide spatially, reflective of synoptic atmospheric patterns. Areas closer to the ocean exhibit more melt variability before melt onset due to a milder, maritime climate. The same events can be seen in several of the pixels (notably figures 4(A)â(C)) but the occurrences are not always significant enough to represent actual melt in each place. It should be noted that the early melt event results are a conservative estimate due to the utilization of both the active and passive sensors.
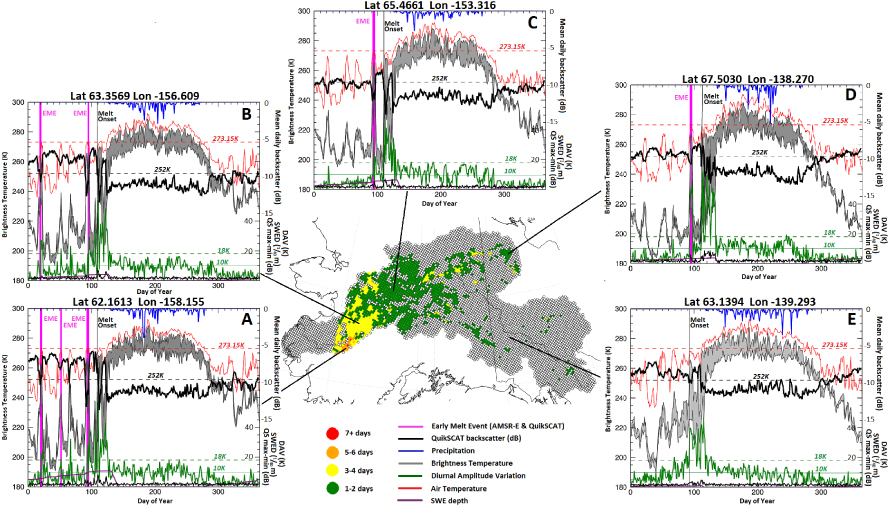
Figure 4. Number of early melt days detected by AMSR-E and QuikSCAT for 2008 across the Yukon River Basin (center) and select pixel time series of the various melt day categories (A)â(E). Time series show the brightness temperature min and max (gray shaded) with its threshold of 252 K (dashed gray line), the diurnal amplitude variation (bottom green line) with its threshold for melt onset of 18 K (dashed green line) and threshold for early melt events at 10 K (solid thin green line), the air temperature (red) with the 0° threshold (dashed red line), snow water equivalent depth (purple), and precipitation (upper blue line) from SnowModel. Early melt events (EME) (which can encompass multiple melt days6) are hot pink vertical lines and melt onset is demarcated with a vertical black line. QuikSCAT mean daily backscatter (dB) is the thick solid black line (right axis) and the difference between the minimum and maximum backscatter per day is shown at the bottom of each plot with the thin black line. Backscatter decreases coincide with Tb increases; both indicate melt. Panel (A) shows the orange category (5â6 days)âmostly broadleaf forest land cover, (B) shows the yellow category (3â4 days)âbroadleaf and dwarf shrublands, (C) and (D) show the green category (1â2 days)âneedleleaf and broadleaf forest, and (E) shows no daysâneedleleaf forest land cover.
Download figure:
Standard imageTo investigate the possible causative factors of the satellite detected early melt events, the events were first checked against ROS occurrences (from SnowModel), then fog occurrences (from NCEP NARR data), and all events, including the remaining events not explained by ROS and fog, were checked against above freezing temperatures (also from NCEP NARR). In 2009 (figure 5), 30% of the melt days coincided with ROS, while the rest were fog related (table 1). Those events not explained by ROS or fog corresponded to positive temperature days giving more confidence to the detection method and results since all the melt events were associated with above freezing temperatures. The proportion of events explained by ROS, fog, or positive temperatures varied considerably across years (figure 6). That said, there were some areas of consistent early melt event occurrence (figure 7), specifically the western end of the basin in the Innoko Lowlands comprised of substantial areas of wetlands and flat river flood plains (Wahrhaftig 1965). Fog occurrences explained more events than ROS. In some years (2003 and 2008) ROS and fog did not explain many of the detected events (but all of the events including those unexplained by ROS and fog were associated with above freezing temperatures).
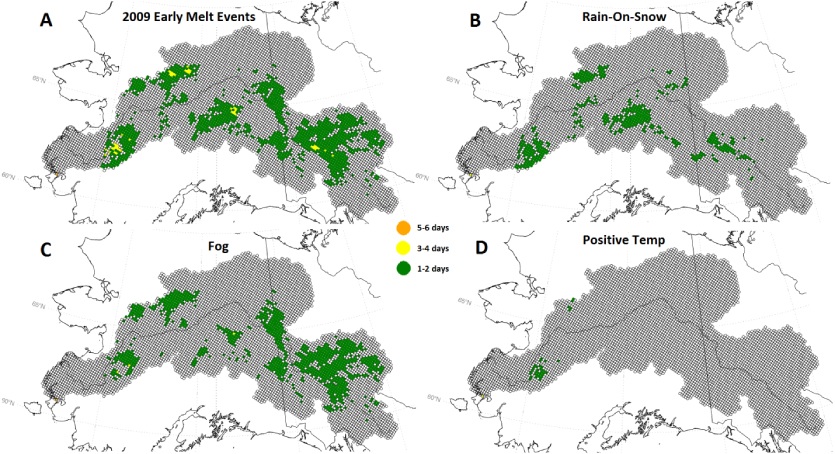
Figure 5. (A) Number of satellite (AMSR-E and QuikSCAT) detected early melt events for 2009 across the Yukon River basin with green showing 1â2 days, yellow 3â4 days, and orange 5â6 days; (B) number of the satellite detected events that coincide with rain on snow (ROS) from SnowModel; (C) number of satellite detected events coinciding with fog occurrence from NCEP NARR data; (D) the remaining (not associated with ROS or fog) satellite detected events which coincide with above freezing temperatures from NCEP NARR. For 2009, the majority of detected events are explained by ROS and fog.
Download figure:
Standard image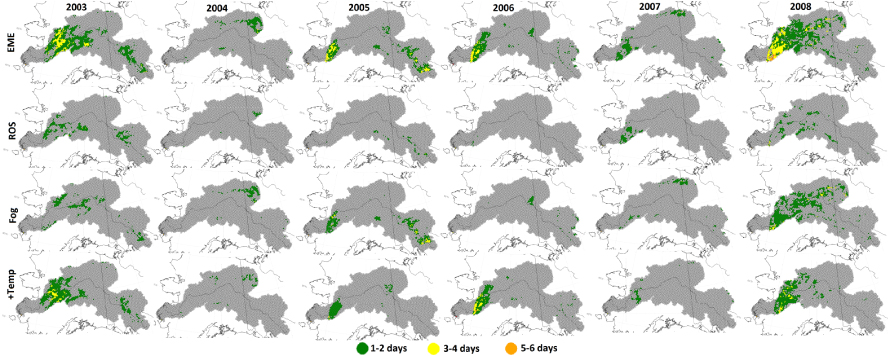
Figure 6. Temporal and spatial variability of the occurrence of early melt days for years 2003 through 2008: (top row) detected by satellite (AMSR-E and QuikSCAT); (second row) days coinciding with rain on snow (ROS) from SnowModel; (third row) days coinciding with fog occurrences; and (bottom row) remaining days not ROS or fog that are associated with above freezing temperatures.
Download figure:
Standard image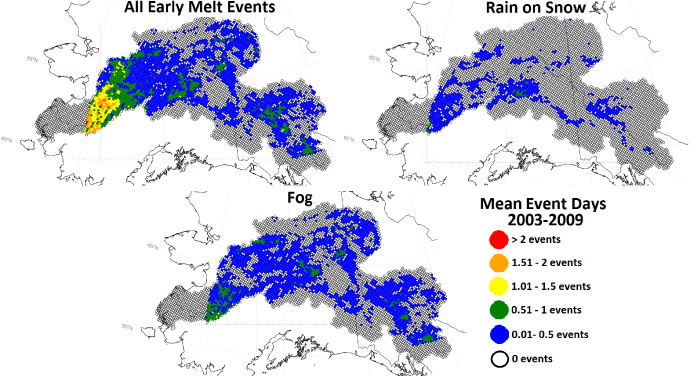
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 7. The mean number of early melt events for 2003â2009 as detected by both passive (AMSR-E) and active (QuikSCAT) satellite sensors, illustrating areas of consistent early melt occurrence.
Download figure:
Standard image{kind=link}
Table 1. Number of pixels with early melt events (EME), the total number of early melt days for the year, the number and per cent of early melt days coinciding with rain on snow (ROS) and fog. The remaining events not explained by ROS or fog correspond with above freezing temperatures (last columns).
| Â | Number of pixels with EME | Total number of detected EMEs | EME and ROS | EME and Fog | EME and Temp | |||
|---|---|---|---|---|---|---|---|---|
| Â | Number | Per cent (%) | Number | Per cent (%) | Number | Per cent (%) | ||
| 2003 | 1247 | 2123 | 416 | 20 | 390 | 18 | 1317 | 62 |
| 2004 | 228 | 287 | 28 | 10 | 169 | 59 | 90 | 31 |
| 2005 | 549 | 1035 | 76 | 7 | 666 | 64 | 293 | 28 |
| 2006 | 465 | 811 | 8 | 1 | 96 | 12 | 707 | 87 |
| 2007 | 311 | 405 | 140 | 35 | 174 | 43 | 91 | 22 |
| 2008 | 1483 | 2739 | 298 | 11 | 1436 | 52 | 1005 | 37 |
| 2009 | 1327 | 1645 | 497 | 30 | 1109 | 67 | 39 | 2 |
5. Discussion
The spatial and temporal occurrences of detected early melt events demonstrate the large variability associated with this phenomenon. Considerable spatial variation in ROS trends were also found by Liston and Hiemstra (2011). There are some areas of consistent occurrence toward the western end of the basin which may reflect the synoptic conditions of a more maritime climate and air mass patterns, or the characteristics of the land cover/ecoregion of the wetlands and flat flood plains of the Innoko Lowlands/Interior Bottomlands (Brabets et al 2000). Wilson et al (2012) also found frequent formation of ice layers in southwestern Alaska using QuikSCAT icing detections. Other studies have found ROS to be associated with southwesterly flow bringing warm air incursions, and upper level flow (represented with 500 hPA geopotential height field from ERA-40) to be better at characterizing events than rain amounts (which tend to be underestimated) (Rennert et al 2009). ROS has been found to be associated with the Pacific-North American (PNA) pattern with the negative phase producing conditions likely to foster ROS events for Alaska (Rennert et al 2009). Further, ROS events in Spitsbergen have been linked to the North Atlantic Oscillation (NAO) when warm air incursions (prominent in the positive phase of NAO) passed through the region (Putkonen and Roe 2003).
While radiation transfer and turbulent exchange (the sum of sensible and latent heat transfer) are the most important exchange processes governing energy interactions at the snow surface (Marks and Dozier 1992), terrain, air mass conditions, and time of year influence which process is more important (Male and Granger 1981). Usually, radiation dominates snowmelt under normal conditions but air mass intrusions (especially warm and wet) can influence the turbulent energy exchange bringing positive sensible heat flux and condensation on the snow surface, initiating snowmelt (Sverdrup 1936, Male and Granger 1981). Thus while sites may be similar physically, geographical differences such as which side of the mountain range or proximity to coast mean the sites will have different air mass intrusions and patterns, affecting the magnitude and relative importance of the energy fluxes (Male and Granger 1981). In this study, fog occurrence is viewed as a proxy for warm air mass intrusion which creates condensation on the snow surface resulting in melt that is detected by the passive microwave. The importance of these warm air intrusions is underscored by the relatively high percentage (table 1) and wide spatial distribution of early melt events that are explained by them.
The variability in causative factors of the melt events is a significant finding from this study. ROS was not the main influence for many of the years and areas, instead fog and positive temperatures largely coincided with and contributed to melt. This result highlights the benefit of utilizing remotely sensed brightness temperatures for detecting melt events. Satellite microwave data can provide near real-time information that is spatially continuous with high temporal resolution that is not affected by darkness or clouds. Relying solely on modeling results or weather station data fails to capture all melt events consistently since they can occur with and without rain on snow. This conclusion is supported by the Banks Island case study where a severe ROS event in October 2003 resulted in 20â000 musk oxen deaths, but detection evidence based only on rain amounts would fail to garner significant attention (Grenfell and Putkonen 2008, Rennert et al 2009, Putkonen et al 2009). Additionally, the sparse network of weather observations in the Arctic and the lack of relevant information collected (i.e. the mixed fraction of rain and snow, not just total dominant precipitation) means ROS are likely underestimated (Grenfell and Putkonen 2008, Putkonen et al 2009).
Further, reliable detection of ROS with automated field equipment is a challenge due to complications from freezing water or melting snow (Putkonen et al 2009). As such, a critical need is field instrumentation that can detect melt events with high temporal resolution. Field data on the specific effects of melt events would further serve to address the current need for information on the storage capacity of snow throughout the various stages of metamorphosis and ice lens development, and the consequent effects on runoff (Singh et al 1997). It may also allow for the quantification of the amount of liquid water in the snow produced by a melt event that is detectable by satelliteâa future direction for research. Early melt events may affect the structure and vertical compaction of the snowpack, number of ice lenses (layers), snowpack wetness, meltwater percolation, underlying soil temperatures, and runoff, thus continued study of their occurrence, effects, and trends is important.
6. Conclusions
An algorithm for detecting early melt events using passive and active microwave sensors was developed and validated against modeling results, reanalysis climate data, and ground based meteorological and hydrological data. Events were detected by defining melt thresholds in passive microwave (AMSR-E) and active microwave (QuikSCAT) datasets. The spatial and temporal variability across the study area (Yukon River Basin) was considerable but there were a few consistent areas of occurrences, notably the wetlands/lowlands of the western end of the basin exhibiting a more maritime climate with frequent warm air mass intrusions. While some events can be explained by ROS events, many more coincide with fog occurrence which may reflect the influence of warm air mass advection. All events (those associated with ROS, fog, and those remaining) are associated with positive temperatures. ROS events may result in changes to hydrology, as seen in the increase in discharge relative to the mean for some pixels. The results suggest a practical methodology for detection of melt events, not confined to ROS, over wider spatial domains than currently possible with just sparse meteorological networks. The similar findings from the diverse data sources utilized in this study enhance the confidence in the results. The results also provide a baseline for assessing future change during the critical late winter/early spring periodâa time of the year when increases in temperature and the resulting effects are projected to be enhanced in the future.
Acknowledgments
We appreciate data and model output from multiple sources: AMSR-E data was provided by the National Snow and Ice Data Center, SeaWinds QuikSCAT data are from the Jet Propulsion Laboratory, NASA, Pasadena, California, NCEP Reanalysis data were provided by the NOAA/OAR/ESRL PSD, Boulder, Colorado, USA, from their web site at www.cdc.noaa.gov/, and all meteorological data were provided by NOAA National Climate Data Center and USDA SCAN and SNOTEL programs. Hydrological were data provided by the USGS National Water Information System. We would like to acknowledge financial support from Lehigh University and NASA Headquarters under the NASA Earth and Space Science FellowshipâGrant NNX10AP14H.
Footnotes
- 5Â
See supplementary material (figures S2âS4 available at stacks.iop.org/ERL/8/014020/mmedia) for a comparison of the early melt detections between AMSR-E and QuikSCAT.
- 6Â
This is the reason why there appear to be fewer events (labeled with pink (E)) then the color of the pixel (green, yellow, or orange). One event can represent multiple days of melt.