Descargue como DOCX, PDF, TXT o lea en línea desde Scribd
Descargar como docx, pdf o txt
Está en la página 1/ 4
ESFUERZO DE TORSIN EN BARRAS
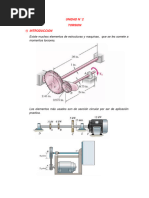
CIRCULARES Consideremos un eje circular unido a un soporte fijo en el extremo como se muestra en la figura. Si se aplica un torque T en el otro extremo, el eje quedas sometido a torsin y su extremo libre rota un ngulo llamado ngulo de torsin. Dentro de los ciertos lmites en ngulo es proporcional a T al igual que a la longitud L del eje. El ngulo detorsin para un eje del mismo material y la misma seccin, pero de longitud doble, se duplicara bajo el mismo torque T.Cuando se somete a torsin un eje circular, toda seccin transversal permanece plana es decir mientras las diferentes secciones transversales a lo largo del eje rotan diferentes cantidades, toda seccin lo hace como una losa rgida. El hecho de que las secciones de un eje circular permanezcan planas se debe a su simetra axial. Considrese los puntos c y d situados en la circunferencia de la seccin transversal del eje y sean c`y d` sus posiciones despus que el eje ha sido sometido a torsin. La simetra axial del eje y de la carga requieren que la rotacin que hubiera llevado la debe ahora llevar d`a c`. As c`y d`deben estar en una circunferencia y el arco c`, d`debe ser igual a cd . Todas las secciones estn sometidas a al mismo torque T y un observador que mire el eje desde A concluida la carga hace que cualquier circulo dibujado en el eje se aleje de el. Se pondr un observador en B para quien las cargas dadas parecen lo mismo (uno en direccin de las manecillas del reloj en la parte delantera y otro en direccin contraria a las agujas en la parte posterior, llegara a la conclusin opuesta es decir que el circulo se mueva hacia el. Ahora se determina la distribucin de deformaciones cortantes en el eje circular de longitud L y radio c que se ha sometido a torsin en un ngulo . Extrayendo del eje un cilindro de radio r considrese el pequeo elemento cuadrado formado por 2 crculos adyacentes y 2 rectas adyacentes trazadas en la superficie del cilindro despus de aplicar cualquier carga. Como se somete el eje a un torque el elemento se transforma en un rombo. Como los crculos que definen 2 de los lados del elemento considerado aqu permanecen constantes la deformacin adyacente debe ser igual al angulo entre las lneas AB y A`B. Para valores pequeos de debe expresarse la longitud de arco AA`como AA`= L. Pero por parte AA`=* o = /L Donde y estn expresados en radianes. La ecuacin obtenida muestra que, como pudo haberse anticipado, la deformacin constante en un punto dado de un eje sometido a torsin es proporcional al ngulo de torsin . Tambin muestra que es proporcional a la distancia de el eje hasta el punto considerado. As la la deformacin constante en el eje circular varia linealmente con la distancia al centro del eje.Se sigue que la deformacin cortante es en la superficie del eje, donde =. Se tiene:
max= c/L eliminando de las ecuaciones puede expresarse la deformacin
cortante a una distancia del eje como: = /c(max)
ANGULO DE TORSION Consideremos el caso de un eje de longitud L y de seccin transversal uniforme de radio c sometido a un torque T en su extremo libre recurdese que el angulo de torsin y la mxima deformacin cortante max se relacionan por: max=c/L Pero en el rango elstico el esfuerzo cortante de fluencia no es excedido en ninguna parte del eje, la ley de hooke es vlida y se tiene que max=max/G o: max=maxG= Tc/jG Igualando los segundos miembros de las ecuaciones y despejando se escribe =TL/JG Donde est en radianes. Se obtiene que el angulo de torsin es proporcional al torque T aplicado al eje. En el caso del eje AB de la figura deben considerarse 4 partes diferentes AC, CD, DE y E. el angulo total de torsin es decir el angulo que rota al extremo A con respecto al extremo B se obtiene aadiendo algebraicamente los ngulos de torsin de cada parte componente. Llamando Ti, Li,Ji y Gi el torque interno, longitud, momento polar de inercia de la seccin y modulo de rigidez correspondientes a la parte i, el angulo de torsin total del eje se expresa como: =i(Ti*Li/Ji*Gi) El torque interno Ti en cada parte del eje se obtiene haciendo un corte a travs de esa parte y dibujando el diagrama de cuerpo libre de la porcin del eje localizada a un lado de la seccin. El el caso del eje con seccin circular variable la ecuacin puede aplicarse a un disco de espesor dx. Entonces se dice que :d=T/JG dx donde J es una funcin de x que debe determinarse. Integrando 0 a L se obtiene el angulo total de L
t dx
torsin del eje: = 0 JG
Considrese el ensamblaje de la 3.25 consta de 2 ejes elsticos AD y BE, cada uno de longitud L radio mdulo de rigidez G, los cuales estn unidos a ruedas dentadas conectadas en C. si el torque T se aplica en E ambos quedaran sometidos a torsin. Como el extremo D del eje AD. Como ambos extremos del eje rotan el angulo de torsin de BE es igual a la diferencia entre los ngulos de rotacin B y E, es decir, el angulo de torsin es igual al angulo que el extremo E rota con respecto al extremo B. llamando este angulo de rotacin
E , B se tiene:
E TL = E B = B JG
SISTEMAS HIPERESTATICOS Para determinar los esfuerzos de un eje es necesario calcular primero los torques internos en las diferentes partes del eje. Los torques se obtienen d e la estatica dibujando los diagramas de cuerpo libre de la porcin del eje a un lado de la seccin y escribiendo que la suma de los torques en esa porcin es cero. Hay situaciones en que los torques internos no pueden determinarse por medio de la estatica solamente. En efecto en tales casos los torques externos mismos es decir los torques ejercidos sobre el ejepor los soportes y conexiones no pueden obtenerse del diagrama de cuerpo libre de todo el eje. Las ecuaciones de equilibrio deben ser complementadas por relaciones que incluyan las deformaciones del eje y que se obtengan considerando la geometra del problema. Puesto que la estatica no es suficiente para determinar los torques internos y externos se dice que tales ejes son estticamente indeterminados.
TRANSMISIN DE POTENCIA Las principales especificaciones que deben cumplirse en el diseo de un eje de transmisin son la potencia que se va transmitir y la velocidad de rotacin del eje. Para determinar el torque en el eje recurdese que en dinmica elemental la potencia P asociada con la rotacin de un cuerpo rigido sometido a un torque T es:
P=T
donde es la velocidad angular en radianes por segundo. Pero =rf donde f es la
frecuencia de la rotacin es decir el numero de revoluciones por segundo. La unidad de frecuencia es
seg
y se lee en hertz (Hz).sustituyendo a en la siguiente
ecuacin se obtiene :
P=2 fT Si se usan unidades SI verifquese que con f en Hz y T en N*m la potencia queda en N*m/s es decir en vatios (W). resolviendo la ecuacin para T se obtiene el torque ejercido sobre el eje que transmite una potencia P a una frecuencia de rotacin f.
T =P/2 f Donde P, f y T estn expresadas en las unidades indicadas anteriormente. Despus de haber determinado el torque T que se aplicara al eje habiendo elegido el material por
utilizar el diseador llevara los torques de T y del mximo esfuerzo admisible a la
ecuacin elstica .despejando a J/c
J =T / max C Y se obtiene asi el mismo valor admisible para el parmetro J/c verifquese que si se usan unidades SI, Testara en N*m, max en pa( N/M) y J/c estar en
m3 .
Cuando se usan unidades americanas la frecuencia esta dada en rpm y la potencia en
caballos (hp). Es entonces necesario expresar la frecuencia en revoluciones por segundo8hertz) y la potencia en pies*lb/s o pulg*lb/s mediante el uso de las relaciones siguientes :
1rpm=
1 1 = Hz 1 60 60 s
1 hp=550lb*pies/s=6600lb*pulg/s Si expresamos la potencia en pulg*lb/s la ecuacin dar el valor del torque T en lb*pulg. Llevando este valor de T a la ecuacin expresando max en psi, se obtiene el valor del parmetro J/c en