Unidad de Operador Del NautoPilot
Unidad de Operador Del NautoPilot
Descargar como pdf o txt
También podría gustarte
- Carta Responsiva CompraventaDocumento1 páginaCarta Responsiva CompraventaInterface Ciber80% (20)
- ACR RLB-41 Manual CastellanoDocumento5 páginasACR RLB-41 Manual CastellanoHarryAún no hay calificaciones
- Schindler Escaleras Miconic f4 9300 9500 9700Documento226 páginasSchindler Escaleras Miconic f4 9300 9500 9700Gabriel Angel Cares Muñoz100% (7)
- Manual User Tron SART20.en - EsDocumento30 páginasManual User Tron SART20.en - EsAndres GonzalezAún no hay calificaciones
- Manual Español IC-M25Documento48 páginasManual Español IC-M25Luciano VeraAún no hay calificaciones
- Menú A La Mesa - Restorán Faro BelénDocumento11 páginasMenú A La Mesa - Restorán Faro BelénDANIELA LARA SEPULVEDAAún no hay calificaciones
- STR 6000aDocumento57 páginasSTR 6000aErly Muñoz100% (1)
- 03-MF-2420339280 COMPACT OPTIMUM ELECT ES E03.09Documento101 páginas03-MF-2420339280 COMPACT OPTIMUM ELECT ES E03.09Federico Erbes0% (1)
- Manual Ce UromacDocumento84 páginasManual Ce UromacCarlos José Domínguez AnguitaAún no hay calificaciones
- ManualDMF Optima Steamer PDFDocumento34 páginasManualDMF Optima Steamer PDFVitoko Espinoza VivarAún no hay calificaciones
- Manual Radio Control IKUSIDocumento133 páginasManual Radio Control IKUSIOscar Contreras100% (1)
- T 16 KDocumento4 páginasT 16 KSmeloAún no hay calificaciones
- Manual Operador 320XPCDocumento170 páginasManual Operador 320XPCmaocaleirl100% (2)
- UNIC ES MINI GRÚAS - v3Documento12 páginasUNIC ES MINI GRÚAS - v3MarkCarstensAún no hay calificaciones
- Owner's Manual Es Generac Vt8-Vtevo Rev 06Documento31 páginasOwner's Manual Es Generac Vt8-Vtevo Rev 06Raimundo GuevaraAún no hay calificaciones
- Manual de Servicio: Fresadora en Frío PL 1000 RSDocumento222 páginasManual de Servicio: Fresadora en Frío PL 1000 RSALFREDO DIAZAún no hay calificaciones
- Manual Alarma Sumi 980 PDFDocumento6 páginasManual Alarma Sumi 980 PDFDaniel PortaAún no hay calificaciones
- Ausa Dumper 200-250-300RMDocumento37 páginasAusa Dumper 200-250-300RMRaul LYARRAún no hay calificaciones
- Ficha Tecnica Platf. Tijera Diesel 15M y 18M Haulotte H15SX H18SXDocumento2 páginasFicha Tecnica Platf. Tijera Diesel 15M y 18M Haulotte H15SX H18SXLaura SaloméAún no hay calificaciones
- Ecosonda Furuno FCV628Documento84 páginasEcosonda Furuno FCV628Luis Alberto Paredes GonzálezAún no hay calificaciones
- Tele Radio: TigerDocumento26 páginasTele Radio: TigersaulAún no hay calificaciones
- Manual de Mantenimiento HT 132 RTJ PRODocumento252 páginasManual de Mantenimiento HT 132 RTJ PROMartin PeluffoAún no hay calificaciones
- Error p0001Documento6 páginasError p0001Anonymous iPsAbwiAún no hay calificaciones
- M550 - THOR - M8 2408 MU 02 - 11 - 2011 SpaDocumento56 páginasM550 - THOR - M8 2408 MU 02 - 11 - 2011 SpaYoseth Jose Vasquez Parra100% (1)
- Manual InstruccionesDocumento144 páginasManual InstruccionesangelAún no hay calificaciones
- HTL 4010 USO - ESP - 2010 - ComprimidoDocumento208 páginasHTL 4010 USO - ESP - 2010 - ComprimidoUnax Ugalide AizagaAún no hay calificaciones
- Ircc-Proc-Pts-0121 V 8Documento45 páginasIrcc-Proc-Pts-0121 V 8ninitakaAún no hay calificaciones
- Webasto Air Top 3500 ST y Air Top 5000 STDocumento4 páginasWebasto Air Top 3500 ST y Air Top 5000 STLigron ANaeAún no hay calificaciones
- Rt890e4 Om CTRL307 08 SpanishDocumento202 páginasRt890e4 Om CTRL307 08 SpanishPEDROAún no hay calificaciones
- Optimun PDFDocumento140 páginasOptimun PDFVictorMoraUrrutiaAún no hay calificaciones
- DK10 MonofasicoDocumento1 páginaDK10 MonofasicoNachoTorresOgalde100% (1)
- Inversor Sunny-Boy 2500Documento50 páginasInversor Sunny-Boy 2500Pedro BadajozAún no hay calificaciones
- Fallo Sensor NoxDocumento9 páginasFallo Sensor NoxDaniel Alex SánchezAún no hay calificaciones
- IT HSE 19 Rev 2 Instructivo Instalación y Retiro de JIB Grúa RTDocumento16 páginasIT HSE 19 Rev 2 Instructivo Instalación y Retiro de JIB Grúa RTRonny AdonesAún no hay calificaciones
- Lmi SMDocumento94 páginasLmi SMJosé barriosAún no hay calificaciones
- Hardstone 1 PDFDocumento22 páginasHardstone 1 PDFDaniel Dusan CruzAún no hay calificaciones
- Trabajo de BuceoDocumento29 páginasTrabajo de BuceocomoquetalAún no hay calificaciones
- Jotron TRON TR-20 CastellanoDocumento11 páginasJotron TRON TR-20 CastellanoHarry GutierrezAún no hay calificaciones
- Navtex SNX300Documento28 páginasNavtex SNX300ArnaldoloAún no hay calificaciones
- MY-SSO-001 Reglamento Interno de Tránsito UM 2023 Rev. 13Documento58 páginasMY-SSO-001 Reglamento Interno de Tránsito UM 2023 Rev. 13ALDO CALDERON SOSAAún no hay calificaciones
- HDS Rubia-Tir-7400-15w40Documento13 páginasHDS Rubia-Tir-7400-15w40Nico Jeria100% (1)
- Big Blue 500X Pro: Manual Del OperadorDocumento64 páginasBig Blue 500X Pro: Manual Del Operadorjulio peña limaAún no hay calificaciones
- Pauta MantencionDocumento1 páginaPauta Mantencionfernando oteizaAún no hay calificaciones
- Manual Del Operador de GrúaDocumento14 páginasManual Del Operador de GrúaLuis Alberto Basilio Verastegui100% (1)
- MU HA26RTJ ES E12.21Documento154 páginasMU HA26RTJ ES E12.21Marketing Occimaq100% (1)
- 7d8c87f92f0f4f83b4b53a801136dbd0Documento1 página7d8c87f92f0f4f83b4b53a801136dbd0Claudio Lobsang TseringAún no hay calificaciones
- Calibrado Del Cuentarrevoluciones y VelocímetroDocumento8 páginasCalibrado Del Cuentarrevoluciones y VelocímetroLuisyxime Luisyxime100% (1)
- Manual de Operador s85 GenieDocumento33 páginasManual de Operador s85 GenieJaime Basquez PaccoAún no hay calificaciones
- Certificado GanchoDocumento3 páginasCertificado GanchopabloAún no hay calificaciones
- Maquina de Soldar Tauro PCT-650Documento28 páginasMaquina de Soldar Tauro PCT-650ArielAún no hay calificaciones
- Manual Operación Grua Horquilla Hyster ChicasDocumento218 páginasManual Operación Grua Horquilla Hyster Chicasanysaavt07Aún no hay calificaciones
- Chevrolet-Traverse 2019 ES-MX MX Bfbedd2d16Documento471 páginasChevrolet-Traverse 2019 ES-MX MX Bfbedd2d16Frank GarciaAún no hay calificaciones
- FC1000305 Botador PasadoresDocumento4 páginasFC1000305 Botador Pasadoresvictor campillay100% (1)
- Ac220-5 Engrase y MantencionDocumento510 páginasAc220-5 Engrase y MantencionborisAún no hay calificaciones
- Manual Usuario H12 - 15 - 18SX - SXL - ESP - E12.18Documento116 páginasManual Usuario H12 - 15 - 18SX - SXL - ESP - E12.18Miguel Henriquez TizkaAún no hay calificaciones
- Manual Ranger 2021 09Documento441 páginasManual Ranger 2021 09Carlos ChiesaAún no hay calificaciones
- MANUAL DOOSAN LEK 1.4 - OrganizedDocumento4 páginasMANUAL DOOSAN LEK 1.4 - OrganizedElizardo TapiaAún no hay calificaciones
- Presen. Binotto PeruDocumento10 páginasPresen. Binotto PeruDanny M Hurtado TaypeAún no hay calificaciones
- File - 5359 - Manual Arctig-130 y Arctig-160 (JS) 22112010Documento16 páginasFile - 5359 - Manual Arctig-130 y Arctig-160 (JS) 22112010Hugo Cesar Follano50% (2)
- 320 XPC Manual Del OperadorDocumento152 páginas320 XPC Manual Del OperadordarwinAún no hay calificaciones
- RCM410R D00403 M XxesDocumento28 páginasRCM410R D00403 M XxesDeimer zapaAún no hay calificaciones
- Caucagua Ptar VenezuelaDocumento14 páginasCaucagua Ptar VenezuelaLeonardo AraujoAún no hay calificaciones
- Documentación de Una ISO 14001Documento2 páginasDocumentación de Una ISO 14001Leonardo AraujoAún no hay calificaciones
- EcosondaDocumento34 páginasEcosondaLeonardo AraujoAún no hay calificaciones
- PG 01 Control de La DocumentaciónDocumento12 páginasPG 01 Control de La DocumentaciónLeonardo AraujoAún no hay calificaciones
- TecNM GA MADocumento16 páginasTecNM GA MALeonardo AraujoAún no hay calificaciones
- English Grammar - The BasicsDocumento49 páginasEnglish Grammar - The BasicsLeonardo AraujoAún no hay calificaciones
- Radioteléfono VHFDocumento146 páginasRadioteléfono VHFLeonardo AraujoAún no hay calificaciones
- Compañías Navieras Autorizadas 2013 PDFDocumento14 páginasCompañías Navieras Autorizadas 2013 PDFLeonardo AraujoAún no hay calificaciones
- Ejercicios de Geometría Plana PDFDocumento7 páginasEjercicios de Geometría Plana PDFLeonardo AraujoAún no hay calificaciones
- Edvard Grieg Peer Gynt1 Morning Mood PianoDocumento5 páginasEdvard Grieg Peer Gynt1 Morning Mood PianoLeonardo AraujoAún no hay calificaciones
- Parcial 1 GeometriaDocumento2 páginasParcial 1 GeometriaLeonardo AraujoAún no hay calificaciones
- Ecoetiqueta Un Instrumento de MercadoDocumento21 páginasEcoetiqueta Un Instrumento de MercadoLeonardo AraujoAún no hay calificaciones
- Trabajo Seguridad Industrial en BuquesDocumento31 páginasTrabajo Seguridad Industrial en BuquesLeonardo Araujo100% (2)
- Trapecios y SimpsonDocumento30 páginasTrapecios y SimpsonLeonardo Araujo100% (5)
- Carta de Recomendacion para Abrir Cuenta 08-17-1Documento1 páginaCarta de Recomendacion para Abrir Cuenta 08-17-1Leonardo Araujo100% (1)
- Ecoetiquetado Etiqueta EcologicaDocumento4 páginasEcoetiquetado Etiqueta EcologicaLeonardo AraujoAún no hay calificaciones
- Declaracion Jurada No Contribuyente de Impuesto Sobre La RentaDocumento1 páginaDeclaracion Jurada No Contribuyente de Impuesto Sobre La RentaLeonardo AraujoAún no hay calificaciones
- Perfil Del Jefe de MantenimientoDocumento4 páginasPerfil Del Jefe de MantenimientoMarko SanzAún no hay calificaciones
- E215C 21-30 ToneladasDocumento13 páginasE215C 21-30 Toneladaskuroh22_Aún no hay calificaciones
- CONSIDERACIONESDocumento14 páginasCONSIDERACIONESLaura V. PardoAún no hay calificaciones
- Mantenimiento de Equipos Aire Acondicionado: Tipo de Documento: ProtocoloDocumento2 páginasMantenimiento de Equipos Aire Acondicionado: Tipo de Documento: ProtocoloYesenia Ana Yurivilca SurichaquiAún no hay calificaciones
- Informe Boroscopia Pacifictuna Doña TuñaDocumento38 páginasInforme Boroscopia Pacifictuna Doña TuñaXavier Diaz100% (1)
- 8 - Las Fuerzas PDFDocumento8 páginas8 - Las Fuerzas PDFJennifer RamirezAún no hay calificaciones
- Macros y Campo CalculadoDocumento12 páginasMacros y Campo CalculadoAdrian CanalesAún no hay calificaciones
- Rev06Documento2 páginasRev06jaimeAún no hay calificaciones
- Taller Conceptos Básicos de Termodinámica 2018Documento2 páginasTaller Conceptos Básicos de Termodinámica 2018David HuertasVegaAún no hay calificaciones
- DW Dreamliners DCD7781 SellSheet SPDocumento2 páginasDW Dreamliners DCD7781 SellSheet SPJulio Ricardo Peralta AlcarazoAún no hay calificaciones
- Catálogo Marzo 2024Documento156 páginasCatálogo Marzo 2024Luis Michael Czy HilarioAún no hay calificaciones
- Logica Cableada IntroduccionDocumento19 páginasLogica Cableada IntroduccionJean Perez VasquezAún no hay calificaciones
- Valvula de Retencion Cuadruple de La Direccion Con Control de Mando 950HDocumento6 páginasValvula de Retencion Cuadruple de La Direccion Con Control de Mando 950HGerardo Jesus Sanchez CañizalesAún no hay calificaciones
- BUM-701-Manto 10km-Cotizacion - 7000018452Documento1 páginaBUM-701-Manto 10km-Cotizacion - 7000018452Rc La libertadAún no hay calificaciones
- Cuaderno de Informes Semana #4Documento5 páginasCuaderno de Informes Semana #4patric telloAún no hay calificaciones
- Tema de TesisDocumento3 páginasTema de TesisSantiago ParralesAún no hay calificaciones
- 777F Prueba de Presiones de Transmision JRP 777F Sis 2.0Documento5 páginas777F Prueba de Presiones de Transmision JRP 777F Sis 2.0EDSON JONATHAN SALINAS AYALAAún no hay calificaciones
- Santiago Residuos SolidosDocumento92 páginasSantiago Residuos SolidosJhon Auccacusi HuallpaAún no hay calificaciones
- Nocturna Fisica 1Documento2 páginasNocturna Fisica 1roberthtaipevAún no hay calificaciones
- Mangueras Bomba VacioDocumento1 páginaMangueras Bomba VacioasamautopartesAún no hay calificaciones
- Trucaje de PistonesDocumento38 páginasTrucaje de PistonesMiguel LincangoAún no hay calificaciones
- Informacion Aceros PlanosDocumento19 páginasInformacion Aceros Planosrafael cocaAún no hay calificaciones
- Warrior Spanish ManualDocumento83 páginasWarrior Spanish Manualgracias2021mexAún no hay calificaciones
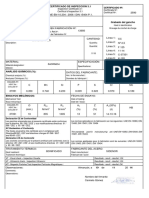
- DE para Asunto Fecha: Informe de Inspección de Unidades Matadero La Tropical, C.ADocumento4 páginasDE para Asunto Fecha: Informe de Inspección de Unidades Matadero La Tropical, C.AJesus S.Aún no hay calificaciones
- Sensor TPMS PDFDocumento34 páginasSensor TPMS PDFManuel Andres Vargas AbastoAún no hay calificaciones
- Contrato de Compraventa de Automotor (Uap315)Documento2 páginasContrato de Compraventa de Automotor (Uap315)Krlos Franck Rguez Hasbun0% (1)
- 77 272 Scudo 603.81.251 Es 01 01.07 L LGDocumento210 páginas77 272 Scudo 603.81.251 Es 01 01.07 L LGJose Maria Ponce RosilloAún no hay calificaciones
- Ejercicios de CinematicaDocumento7 páginasEjercicios de CinematicaKattita BellaAún no hay calificaciones
- Diag Valvula Propocional 6125dDocumento3 páginasDiag Valvula Propocional 6125dLuylly alejandroAún no hay calificaciones