Unidad 3 Métodos de Búsqueda
Unidad 3 Métodos de Búsqueda
Descargar como docx, pdf o txt
También podría gustarte
- Unidad 6 Diseño de ProgramasDocumento6 páginasUnidad 6 Diseño de ProgramasJeikel JosueAún no hay calificaciones
- Unidad 5. Gerencia Del Area de Equipos y TecnologiaDocumento9 páginasUnidad 5. Gerencia Del Area de Equipos y TecnologiaJosé Francisco Q100% (1)
- 3 2 Herramientas para Apoyar Al Proceso y La Ejecucic3b3n de Las Revisiones de SoftwareDocumento1 página3 2 Herramientas para Apoyar Al Proceso y La Ejecucic3b3n de Las Revisiones de SoftwareSamuelEuripidesLariosMendezAún no hay calificaciones
- Manual Haccp de Los Panetones en GeneralDocumento24 páginasManual Haccp de Los Panetones en Generalesther valeria laura100% (2)
- Analisis de Sistema.Documento13 páginasAnalisis de Sistema.Franlismar MedinaAún no hay calificaciones
- Instrumentacion Didactica - Estadistica Inferencial I - IQ-cDr. Jose A. Sarricolea ValenciaDocumento39 páginasInstrumentacion Didactica - Estadistica Inferencial I - IQ-cDr. Jose A. Sarricolea ValenciaJose Adalberto Sarricolea ValenciaAún no hay calificaciones
- Diseño de Interfaces de UsuarioDocumento13 páginasDiseño de Interfaces de UsuarioDairelys MartinezAún no hay calificaciones
- Metodo de BusquedaDocumento14 páginasMetodo de Busquedayorgeni moronAún no hay calificaciones
- Administrar Fallas en La RedDocumento11 páginasAdministrar Fallas en La RedAdonay MolinaAún no hay calificaciones
- Codificacion Efectiva Captura de Datos Efectiva y EficienteDocumento13 páginasCodificacion Efectiva Captura de Datos Efectiva y EficientekrameloratAún no hay calificaciones
- Unidad 1 Introducción A Los Sistemas MultimediaDocumento7 páginasUnidad 1 Introducción A Los Sistemas MultimediaNova Issei Gremory100% (1)
- Decisiones Bajo Certidumbre - Unidad 3 Alejandro VeleiroDocumento16 páginasDecisiones Bajo Certidumbre - Unidad 3 Alejandro VeleiroAlejandro VeleiroAún no hay calificaciones
- Unidad 3 Decisiones Bajo CertidumbreDocumento15 páginasUnidad 3 Decisiones Bajo CertidumbreJeikel JosueAún no hay calificaciones
- Cardinalidad de Base de DatosDocumento3 páginasCardinalidad de Base de DatosANTONY JAHIR ORTIZ ROMERO100% (2)
- Unidad 6 Proteccion y SeguridadDocumento18 páginasUnidad 6 Proteccion y SeguridadjhiecooAún no hay calificaciones
- Diseño de Sistema Fases. PrototiposDocumento6 páginasDiseño de Sistema Fases. PrototiposEdgardo Molina0% (1)
- Unidad 5 SimulacionDocumento11 páginasUnidad 5 Simulacion12345alex12345100% (2)
- Unidad 4 Diseño de SistemasDocumento3 páginasUnidad 4 Diseño de SistemasCristianHerediaAún no hay calificaciones
- Unidad 5 de ImplantacionDocumento11 páginasUnidad 5 de ImplantacionJose RangelAún no hay calificaciones
- UJNIDAD 5 Simulación de Sistemas ContinuosDocumento8 páginasUJNIDAD 5 Simulación de Sistemas Continuosjjgl19890% (2)
- Fundamentos y Elementos BásicosDocumento10 páginasFundamentos y Elementos Básicosdani_228469497Aún no hay calificaciones
- Actividad 2Documento5 páginasActividad 2Boris Rojas AguilarAún no hay calificaciones
- Procedimientos Especiales para La Generacion de Variables AleatoriasDocumento9 páginasProcedimientos Especiales para La Generacion de Variables AleatoriasGiovanni SalazarAún no hay calificaciones
- Unidad 2Documento10 páginasUnidad 2Christian Espinosa GalindoAún no hay calificaciones
- Propiedades ADLDocumento30 páginasPropiedades ADLMONICA YAMILE BERMUDEZ SEGURAAún no hay calificaciones
- Los Estadios de La Metodologia de ChecklandDocumento6 páginasLos Estadios de La Metodologia de ChecklandjuanAún no hay calificaciones
- Tecnologia Estructurada y Orientada A ObjetosDocumento2 páginasTecnologia Estructurada y Orientada A ObjetosGabriel Morales0% (1)
- Guia 1 Unidad I Introduccion A La IODocumento12 páginasGuia 1 Unidad I Introduccion A La IOPACHECOJN100% (1)
- Practica 1 Analisis y Diseño de SistemasDocumento8 páginasPractica 1 Analisis y Diseño de SistemasSergio Quispe FloresAún no hay calificaciones
- Método Del GradienteDocumento2 páginasMétodo Del GradienteMaryorick Vizcarra CondoriAún no hay calificaciones
- Reporte Toma de DecisionesDocumento4 páginasReporte Toma de DecisionesFernando RamirezAún no hay calificaciones
- Caracteristicas Del Lenguaje C++Documento8 páginasCaracteristicas Del Lenguaje C++Gustavo JuveraAún no hay calificaciones
- Estructura de Un Trabajo de InvestigaciónDocumento2 páginasEstructura de Un Trabajo de InvestigaciónJuan José Montes de OcaAún no hay calificaciones
- Resumen Requerimientos Del SoftwareDocumento2 páginasResumen Requerimientos Del SoftwareJuniorLove2012100% (1)
- Material Implantación de SistemasDocumento59 páginasMaterial Implantación de Sistemasmigda01Aún no hay calificaciones
- Caracteristicas Del SoftwareDocumento53 páginasCaracteristicas Del SoftwareRoberto Castilleja0% (2)
- Metodos de AuditoriaDocumento12 páginasMetodos de AuditoriaJose Gregorio Vasquez PinedaAún no hay calificaciones
- Simulacion Ensayo Unidad 1.Documento12 páginasSimulacion Ensayo Unidad 1.Luis IbarraAún no hay calificaciones
- Actividad Práctica 3-1Documento3 páginasActividad Práctica 3-1Jorge OrAún no hay calificaciones
- Contenido Proyecto IIIDocumento6 páginasContenido Proyecto IIIalonzoluis606Aún no hay calificaciones
- Diagramas de Clases InformeDocumento16 páginasDiagramas de Clases InformeWill Farfan UrquizoAún no hay calificaciones
- Programacion No Lineal PDFDocumento27 páginasProgramacion No Lineal PDFJose J Franco MAún no hay calificaciones
- Algoritmos y Lenguaje Deprogramacion Unidad 4Documento16 páginasAlgoritmos y Lenguaje Deprogramacion Unidad 4mario100% (1)
- Características Del ModeloDocumento3 páginasCaracterísticas Del ModeloElisa AlanocaAún no hay calificaciones
- Unidad 3 Decisiones Bajo CertidumbreDocumento9 páginasUnidad 3 Decisiones Bajo CertidumbreAlejandro PerdomoAún no hay calificaciones
- 4.2 - Salidas Estándar de Audio y Video - 4.2. Funcionamiento y Configuración de Salidas de Audio y VideoDocumento1 página4.2 - Salidas Estándar de Audio y Video - 4.2. Funcionamiento y Configuración de Salidas de Audio y VideoScorpion GaymerAún no hay calificaciones
- Requerimientos de Una Administracion Efectiva de InventariosDocumento16 páginasRequerimientos de Una Administracion Efectiva de InventariosKimberly Reed100% (2)
- Definición, Desarrollo y Tipos de Modelos de Investigación de Operaciones.Documento3 páginasDefinición, Desarrollo y Tipos de Modelos de Investigación de Operaciones.salvador cervantes100% (1)
- Herramientas CaseDocumento10 páginasHerramientas CaseJorge LuisAún no hay calificaciones
- Sistema Operativo AUTORESDocumento3 páginasSistema Operativo AUTORESRogers Morales HernandezAún no hay calificaciones
- 4.1. El Flujo de Control de Un ProgramaDocumento10 páginas4.1. El Flujo de Control de Un ProgramabidbifbAún no hay calificaciones
- Documento Sin TítuloDocumento28 páginasDocumento Sin TítuloMaría Alejandra Sant GarciaAún no hay calificaciones
- Ejercitario Cap 5 ResueltoDocumento3 páginasEjercitario Cap 5 ResueltoVicenteAún no hay calificaciones
- 3.4 Creacion de Componentes Visuales y No Visuales Definidos Por El UsuarioDocumento7 páginas3.4 Creacion de Componentes Visuales y No Visuales Definidos Por El UsuarioCristy Ramos0% (1)
- Simulación Unidad 2 - Pruebas (PVSH) Ok PDFDocumento48 páginasSimulación Unidad 2 - Pruebas (PVSH) Ok PDFErick RodriguezAún no hay calificaciones
- Calculo Integral C5 - 4.3-4.4-4.5Documento11 páginasCalculo Integral C5 - 4.3-4.4-4.5Manuel Quezada EstradaAún no hay calificaciones
- Metodología Kendall y KendallDocumento7 páginasMetodología Kendall y KendallJhonny MoreiraAún no hay calificaciones
- Variable N DimensionalDocumento2 páginasVariable N DimensionalAna Gabriela Laura Nata100% (1)
- Marco Conceptual de Simulación de SistemasDocumento5 páginasMarco Conceptual de Simulación de Sistemaseduard alfredAún no hay calificaciones
- Métodos de BúsquedaDocumento10 páginasMétodos de BúsquedaOmerAún no hay calificaciones
- Métodos de BúsquedaDocumento9 páginasMétodos de BúsquedaOmerAún no hay calificaciones
- Actividad 3 TeleprocesosDocumento18 páginasActividad 3 TeleprocesosJeikel JosueAún no hay calificaciones
- Unidad 3 Decisiones Bajo CertidumbreDocumento15 páginasUnidad 3 Decisiones Bajo CertidumbreJeikel JosueAún no hay calificaciones
- Trabajo N 3 Simulación de ModelosDocumento10 páginasTrabajo N 3 Simulación de ModelosJeikel JosueAún no hay calificaciones
- Unidad 3 Documentación de SistemasDocumento13 páginasUnidad 3 Documentación de SistemasJeikel JosueAún no hay calificaciones
- Unidad 2 Construcción de ProgramasDocumento7 páginasUnidad 2 Construcción de ProgramasJeikel JosueAún no hay calificaciones
- Trabajo N 2 Simulación de ModelosDocumento7 páginasTrabajo N 2 Simulación de ModelosJeikel JosueAún no hay calificaciones
- Informe Unidad 1,2 y 3 Auditoria de SistemasDocumento21 páginasInforme Unidad 1,2 y 3 Auditoria de SistemasJeikel Josue100% (1)
- Informe Unidad 1 y 2 Redes de Área LocalDocumento44 páginasInforme Unidad 1 y 2 Redes de Área LocalJeikel JosueAún no hay calificaciones
- Fundamentos y Elementos Basicos (Unidad 1)Documento4 páginasFundamentos y Elementos Basicos (Unidad 1)Jeikel JosueAún no hay calificaciones
- Asignacion 1 Marco Legal para El Ejercicio de La IngenieriaDocumento3 páginasAsignacion 1 Marco Legal para El Ejercicio de La IngenieriaJeikel JosueAún no hay calificaciones
- Actividad 3 CCDocumento13 páginasActividad 3 CCJeikel JosueAún no hay calificaciones
- Actividad 2 CCDocumento32 páginasActividad 2 CCJeikel JosueAún no hay calificaciones
- Presentación 10% Gerencia de ProyectosDocumento14 páginasPresentación 10% Gerencia de ProyectosJeikel JosueAún no hay calificaciones
- Actividad 1 TeleprocesosDocumento25 páginasActividad 1 TeleprocesosJeikel JosueAún no hay calificaciones
- Temas Nro 3,4,5.6Documento2 páginasTemas Nro 3,4,5.6Jeikel JosueAún no hay calificaciones
- IA Trabajo Tercer CorteDocumento30 páginasIA Trabajo Tercer CorteJeikel JosueAún no hay calificaciones
- Actividad 1 Trabajo EscritoDocumento9 páginasActividad 1 Trabajo EscritoJeikel JosueAún no hay calificaciones
- The Kingdom - Jenika SnowDocumento81 páginasThe Kingdom - Jenika SnowRosa Jimenez100% (4)
- Clase 2Documento28 páginasClase 2Alejandro Daniel Gonzalez SanchoAún no hay calificaciones
- Plan de Negocios Comercializadora de HuevosDocumento10 páginasPlan de Negocios Comercializadora de HuevosYoxana León LandinAún no hay calificaciones
- Tesis Yesenia Trillo Mendoza PDFDocumento63 páginasTesis Yesenia Trillo Mendoza PDFYesenia TrilloAún no hay calificaciones
- Brouchure-Programa-MAESTRIA-EN-GERENCIA-DEL-TURISMO-SOSTENIBLE-ULAC EditedDocumento14 páginasBrouchure-Programa-MAESTRIA-EN-GERENCIA-DEL-TURISMO-SOSTENIBLE-ULAC Editeddavidgperez1982Aún no hay calificaciones
- Fluidos de Corte en El MaquinadoDocumento2 páginasFluidos de Corte en El MaquinadoSergio QuinteroAún no hay calificaciones
- Documento A4 Mapa Conceptual Creativo Juvenil ColoridoDocumento1 páginaDocumento A4 Mapa Conceptual Creativo Juvenil ColoridoFernando Munayco ZorrillaAún no hay calificaciones
- Catalogo de Guias y AditamentosDocumento13 páginasCatalogo de Guias y AditamentosViviana Karla valencia giraldo100% (1)
- 1° Practica Calificada GrupalaDocumento2 páginas1° Practica Calificada GrupalaEduardo Sebastián Campos CubaAún no hay calificaciones
- Los Paramos en ColombiaDocumento3 páginasLos Paramos en ColombiaIPJSOLUCIONESAún no hay calificaciones
- Linea Del Tiempo Revolución......Documento2 páginasLinea Del Tiempo Revolución......Benja TrellesAún no hay calificaciones
- Neuropsicologia de La Interaccion Cerebro Con El Medio Ambiente y SociedadDocumento7 páginasNeuropsicologia de La Interaccion Cerebro Con El Medio Ambiente y SociedadEko ValenciaAún no hay calificaciones
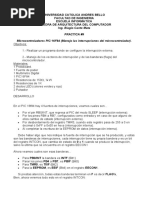
- Practica Numero 9. PIC Interrupciones.Documento6 páginasPractica Numero 9. PIC Interrupciones.Roiberth GonzálezAún no hay calificaciones
- Informe Final de Investigación de MercadosDocumento16 páginasInforme Final de Investigación de MercadosElizabeth GonzalezAún no hay calificaciones
- Reporte RSEDocumento59 páginasReporte RSEnatalinoelAún no hay calificaciones
- Test 3V UrologíaDocumento10 páginasTest 3V UrologíasakuudlAún no hay calificaciones
- Casos de Residuos Solidos en El PeruDocumento10 páginasCasos de Residuos Solidos en El PeruJakceline Rojas MedinaAún no hay calificaciones
- Informe Taller ArduinoDocumento6 páginasInforme Taller ArduinoJhojan QuevedoAún no hay calificaciones
- Repaso Temas Cirugia PreinternadoDocumento31 páginasRepaso Temas Cirugia PreinternadoNatalia GarcíaAún no hay calificaciones
- GFPI-F-135 Guia de Aprendizaje Medio Ambiente SSTDocumento20 páginasGFPI-F-135 Guia de Aprendizaje Medio Ambiente SSTpollitajaimesAún no hay calificaciones
- Non Wovens ThesisDocumento99 páginasNon Wovens ThesisGerardo EspinozaAún no hay calificaciones
- Trabajo Académico en WordDocumento6 páginasTrabajo Académico en Wordfelix SamameAún no hay calificaciones
- Plantas MágicasDocumento7 páginasPlantas MágicasCarolany Campos Sandino100% (1)
- Clase 3. Enfermedades Relacionadas Con Sistema Inmunitario 2Documento16 páginasClase 3. Enfermedades Relacionadas Con Sistema Inmunitario 2Diego AramburoAún no hay calificaciones
- Algoritmos Profesor LunaDocumento82 páginasAlgoritmos Profesor LunaJoshua PerryAún no hay calificaciones
- Taller Procesos AdministrativosDocumento4 páginasTaller Procesos AdministrativosJulian HenaoAún no hay calificaciones
- Modulo Higiene y Seguridad IndustrialDocumento80 páginasModulo Higiene y Seguridad IndustrialLizett Pesantez YarAún no hay calificaciones
- Casos Practicos Ctos X ProcesosDocumento3 páginasCasos Practicos Ctos X ProcesosDaniel S A AmayaAún no hay calificaciones
- Sesión Razones DP e IPDocumento15 páginasSesión Razones DP e IPGiovanni SánchezAún no hay calificaciones