Este documento explica cómo modelar un sistema de segundo orden en Scilab usando XCOS. Se describe un sistema mecánico masa-resorte-amortiguador y su ecuación diferencial. En XCOS, se diseña un diagrama de bloques con dos integradores en serie representando la ecuación. Luego se asignan parámetros, se agrega una entrada y una salida para visualizar, y se simula obteniendo la respuesta del sistema en el tiempo.
0 calificaciones0% encontró este documento útil (0 votos)
237 vistas8 páginas
Este documento explica cómo modelar un sistema de segundo orden en Scilab usando XCOS. Se describe un sistema mecánico masa-resorte-amortiguador y su ecuación diferencial. En XCOS, se diseña un diagrama de bloques con dos integradores en serie representando la ecuación. Luego se asignan parámetros, se agrega una entrada y una salida para visualizar, y se simula obteniendo la respuesta del sistema en el tiempo.
Este documento explica cómo modelar un sistema de segundo orden en Scilab usando XCOS. Se describe un sistema mecánico masa-resorte-amortiguador y su ecuación diferencial. En XCOS, se diseña un diagrama de bloques con dos integradores en serie representando la ecuación. Luego se asignan parámetros, se agrega una entrada y una salida para visualizar, y se simula obteniendo la respuesta del sistema en el tiempo.
Este documento explica cómo modelar un sistema de segundo orden en Scilab usando XCOS. Se describe un sistema mecánico masa-resorte-amortiguador y su ecuación diferencial. En XCOS, se diseña un diagrama de bloques con dos integradores en serie representando la ecuación. Luego se asignan parámetros, se agrega una entrada y una salida para visualizar, y se simula obteniendo la respuesta del sistema en el tiempo.
Descargue como DOCX, PDF, TXT o lea en línea desde Scribd
Descargar como docx, pdf o txt
Está en la página 1/ 8
MODELADO DE SISTEMAS DE SEGUNDO ORDEN EN SCILAB
A continuación se realizará la simulación de un sistema descrito por una ecuación diferencial de
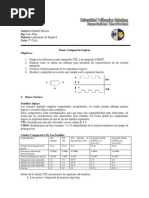
segundo orden. En este sistema de control se simula un sistema mecánico que contiene una masa M sometida a una fuerza externa f(t) y unida a un resorte de constante elástica K, y con un coeficiente de fricción viscosa B, como se describe en la figura:
Sistema de control mecánico masa – resorte – amortiguador.
El objetivo del sistema de control mecánico es ver cómo afecta la fuerza aplicada f(t) al desplazamiento de la masa, descrito por x(t) . La ecuación diferencial que rige el comportamiento de este sistema se puede obtener mediante la segunda ley de Newton y es el siguiente:
Donde la sumatoria de las fuerzas es igual a 0.
Dentro de SCILAB se requiere ingresar al entorno gráfico para realizar este modelado. La herramienta que se utiliza es XCOS y se puede acceder a ella de la siguiente manera:
Paso en XCOS para modelar el sistema:
Escribiendo XCOS desde la interfaz de SCILAB y presionando la tecla enter. Luego se desplegará automáticamente la paleta de objetos de XCOS y su entorno de trabajo.
1. Lo primero que debe hacerse en XCOS es definir la salida del sistema despejando su máxima derivada. Esto a partir de la ecuación descrita anteriormente.
Ecuación del sistema:
En este caso, el término de su máxima derivada es el elemento que acompaña a la masa
(ya que su exponente es 2, el mayor de todos). En este sentido al despejar el término se tiene: 2. Como siguiente paso se diseña en XCOS el diagrama de bloques considerando un integrador en cascada o en serie como orden tenga el sistema.
Como el máximo elemento tiene exponente 2, entonces hay dos integradores que deben graficarse. Desde el punto de vista matemático la salida del sistema x (t ) es la salida del último integrador, mientras que de manera forzada la entrada del segundo integrador es dx (t) , la cual es la salida del primer integrados lo que indica que su entrada deberá ser dt d 2 x (t) dt2 De manera gráfica:
3. Luego se deben asignarlos parámetros del sistema, considere que el sistema mecánico que se está evaluando tiene los valores: a. M = 1 Kg. b. K = 10 Nt seg/m c. B = 1 Nt
Es posible que el diagrama de bloques de XCOS utilice estas mismas letras para denotar a las variables de la ecuación, para lograr esto se debe configurar el contexto en el programa.
En el menú: simulación (o simulation si SCILAB es configurado en inglés), hacer clic en
Asignar contexto (Set Context), se desplegará una pequeña pantalla donde se escribirán los valores de M, K y B.
4. Luego de asignar el contexto se debe obtener la máxima derivada requerida mediante la
ecuación del sistema. Como el sistema es lineal e invariante en el tiempo la ecuación requiere solo de sumas, restas y multiplicaciones por constantes (ganancias constantes). El diagrama de un sistema se muestra en la siguiente imagen:
En la imagen anterior se muestra el diagrama de la ecuación diferencial, note cómo se
ubican las ganancias que representan los coeficientes de la ecuación del sistema.
5. En la imagen anterior se tiene el diagrama de bloques, sin embargo no hay entradas
conectadas ni equipos que permitan visualizar la salida del sistema. En este sentido, se probará el sistema con una entrada generada f(t), para lo que se incorporará el bloque “STEP_FUNTION” o señal escalón, que generará una función escalón unitario.
Por otro lado la salida se visualiza a través de un bloque CSCOPE (que representa un osciloscopio), el diagrama al conectar estos elementos queda de la siguiente manera: 6. Luego que está diseñado el diagrama con sus entradas y salidas se configuran los parámetros de la simulación haciendo doble clic en cada bloque. a. STEP_FUNTION:
b. CSCOPE: Intervalo vertical de -0.01 a 0,2 metros Con un intervalo de tiempo de 10
segundos. En Título se puede colocar: Posición (Metros). Los demás parámetros que no se mencionan no afectan el comportamiento de la salida por lo que no es necesario modificar los valores por defecto c. CLOCK_C: se configura para generar pulsos y tomar muestras cada 0,1 segundo partiendo del instante 0.
d. Otros elementos que se deben configurar son los parámetros de la simulación en
el menú simulación. El único valor que debe modificarse es el tiempo final en el cual se deben colocar 10 segundos. 7. Finalmente todo está configurado para observar la respuesta del sistema, que debe ser similar a la estudiada en el contenido de la semana. De estar todo correcto se debe observar al darle play a la simulación una señal similar a:
Este gráfico se desplegará automáticamente al ejecutar la simulación.
En el material complementario de la semana podrá descargar el archivo en XCOS y probar y
verificar las configuraciones realizadas en este documento.
Importante:
Si quiere representar un modelo eléctrico o electrónico de segundo orden el diagrama de bloques
con los dos integradores es igual. Solo debe cambiar las variables del contexto por los equivalentes a R, L y C. Tal como se muestra en el contenido de la semana. Además recuerde que la ecuación del sistema viene dada por la ley de Kirchhoff, sin embargo, el procedimiento es igual al presentado en este tutorial.