Planos de Aeropuerto-Alfa
Planos de Aeropuerto-Alfa
Cargado por
Alex SO NICECopyright:
Formatos disponibles
Planos de Aeropuerto-Alfa
Planos de Aeropuerto-Alfa
Cargado por
Alex SO NICEDescripción original:
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Copyright:
Formatos disponibles
Planos de Aeropuerto-Alfa
Planos de Aeropuerto-Alfa
Cargado por
Alex SO NICECopyright:
Formatos disponibles
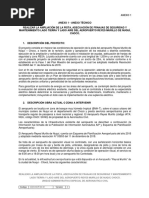
Diseño de Plano de aeródromo para
Junio 2015
movimientos en tierra y rutas/modelos de
superficie para aplicaciones de sistema GNSS
Aeropuerto de Caudé (Teruel)
Autor: Pablo Fernández Bobadilla Sánchez email: pabferde@topo.upv.es
Tutor: Israel Quintanilla García email: iquinta@cgf.upv.es
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
ÍNDICE
1. Introducción ........................................................................... 2
2. Objetivos ................................................................................ 5
3. Antecedentes ......................................................................... 6
4. Programas a utilizar ................................................................ 9
4.1 ArcGIS ............................................................................... 9
4.2 OruxMaps.......................................................................... 11
5. Metodología ......................................................................... 13
5.1 Plano para movimiento en tierra de aeronaves .............. 13
5.2 Rutas y modelos de superficie para OruxMaps ............... 33
6. Simulador de vuelo Google sobre modelos superficies ........ 54
7. Resumen/Conclusión............................................................ 55
8. PLANOS ................................................................................ 56
9. ANEXOS ................................................................................ 60
10. Glosario ............................................................................. 67
11. Bibliografía......................................................................... 70
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
1. Introducción 2
El aeropuerto de Teruel es conocido bajo el nombre Plataforma Aeroportuaria- Teruel
Plata es un aeródromo situado muy cerca del Pueblo de Caudé (Teruel), entrando en
servicio en febrero de 2013. Está destinado como centro de mantenimiento, de
reciclado de aeronaves, almacenamiento de corta y larga duración y para el
almacenamiento de aeronaves pesadas.
OACI: LETL
El aeropuerto todavía no está previsto para pasajeros hoy en día. Está ubicado en el
antiguo campo de Tiro del Ejercito del Aire, que tras cerrarse se vendió al ayuntamiento
de Teruel, que junto a la Diputación General de Aragón llevan el motor del proyecto del
aeródromo.
El Aeropuerto se encuentra en las coordenadas siguientes:
40°24′43″N 1°13′03″O
Imagen Google Maps Situación España PROVINCIA TERUEL
Nota:
El Código de aeropuertos de OACI
Es un código que se le asigna a los aeropuertos que sirve para identificarlos alrededor
del mundo, y está compuesto por 4 caracteres alfanuméricos. Están definidos por la OACI
(Organización de aviación civil internacional), y su labor es el control del tráfico aéreo, la
planificación de vuelos para los aviones y también sirven para identificar las estaciones
meteorológicas o centros de control de área. La IATA, a diferencia de este código, es
usada como pizarras de las aerolíneas, equipajes y reservas.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Imagen Google Maps PNOA
Imagen Google Maps+PNOA “Fusión”
El nuevo aeropuerto que ya está operativo, tiene una pista de 2825 metros de largo
(9266 𝑝𝑖𝑒𝑠1) con una orientación de pista 18 − 36 2. Una superficie de asfalto y una
plataforma de mantenimiento de aeronaves de 2700 metros cuadrados y de
estacionamiento de 120 hectáreas.
La zona está compuesta de una zona industrial para la implantación de empresas y con
un hangar para capacidad de aviones de transporte de alta capacidad de
almacenamiento como un Airbus 380. Contiene unas instalaciones de extinción de
incendios y una terminal de servicios general.
El aeropuerto está comunicado por carretera a través de la N-234 y de la A-23, a 2
kilómetros del pueblo de Caudé y 10 kilómetros de la ciudad de Teruel.
1. Un pie equivale a 33 centímetros
2. 18-36 se refiere a la orientación de pista 18: rumbo 180º 36: rumbo 360º, Sur magnético y Norte
magnético
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Imagen aérea del aeropuerto de Caudé (Teruel) en fase de construcción
1º Imagen 2º Imagen
Nota:
Las dos últimas imágenes podemos observar las plataformas de reciclaje de
aeronaves (1º imagen) y de estacionamiento (2º imagen), esta última
estará centrado en nuestro estudio para elaborar el plano, ya que la
plataforma de reciclaje no es una superficie para estacionamiento regular
de aeronaves, si no será la plataforma rectangular situado enfrente del
hangar de mantenimiento del aeropuerto. Esta plataforma está todavía en
construcción ya como se ve en la imagen solo está hecho una cuarta parte
de la plataforma.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
2. Objetivos 5
El objetivo de este proyecto es elaborar tres Planos alternativos de aeródromo para
movimientos en tierra y rutas/modelos de superficie para aplicaciones de sistema
GNSS (móviles) para la tripulación de aeronaves que desean conocer las calles de rodaje,
plataforma y pista de despegue del aeródromo de Teruel. Se realizan tres planos debido
a que no se sabe aún si habrá más de una salida a pista ya que la plataforma aún no está
terminada del todo. Se diseñará rutas y modelos de superficie del aeropuerto para un
sistema de GNSS de Android para facilitar a la tripulación datos para su circulación en
pistas. (Ver en página 67 “Anexo 4 CAPITULO 14” las normas de diseño del plano para
movimiento en tierra de aeronaves).
Para realizar este proyecto hay que recoger datos informativos de la página
www.enaire.es que es responsable de la gestión y control del tránsito aéreo, y de las
redes de comunicación, navegación y vigilancia. Esta entidad pública está adscrita al
Ministerio de Fomento. Conforme a la Ley 09/2010, esta empresa está asignada al
suministro de los servicios de tránsito aéreo en las fases de ruta y aproximación.
Las funciones de ENAIRE en navegación aérea son: (página Enaire.es)
La planificación, dirección, coordinación, explotación, conservación y
administración del tráfico aéreo, de los servicios de telecomunicaciones e
información aeronáutica, así como de las infraestructuras, instalaciones y redes
de comunicaciones del sistema de navegación aérea. El objetivo es que las
aeronaves que se desplazan por el espacio aéreo español obtengan la máxima
seguridad, fluidez, eficacia y puntualidad.
La elaboración y la aprobación de distintos tipos de proyectos, además de la
ejecución y gestión de control de las inversiones.
La evaluación de las necesidades y propuestas para nuevas infraestructuras, al
igual que las posibles modificaciones en la ordenación del espacio aéreo.
La participación en la formación aeronáutica específica y sujeta a la concesión de
licencias oficiales.
Servicio de información aeronáutica/cartas de navegación de los
aeropuertos de España
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
La siguiente imagen 3 se observa las cartas de navegación que hoy en día están
6
disponibles del aeropuerto Caudé (Teruel):
Imagen 3
Con los datos recogidos tenemos que tener en cuenta las dimensiones de la pista de
aterrizaje, como la de calles de rodaje y las plataformas, la situación de las instalaciones
como la terminal, la red eléctrica, depósitos ,hangares e información sobre los pesos
máximos exigidos en la plataforma para evitar hundimiento de la misma.
La plataforma de estacionamiento, parte de ella está en construcción, ahora solo hay un
acceso a pista, pero en el futuro podría haber tres. Se realizarán 3 planos alternativos
con uno a varios accesos a pista. Se explicara todo en la parte de metodología de ArcGIS.
Para el desarrollo del sistema de GNSS (móviles) del aeropuerto de Teruel para pilotos
civiles se elaborará modelos de superficie en 2D con distinto formato y simbología que
el del plano en movimiento en tierra, ya que nuestro objetivo es crear unos modelos de
superficie con simbología parecida a la superficie real, y las rutas se elaboraran con el
mismo sistema de referencia WGS84 que se utilizará para los modelos de superficie para
el sistema GNSS y el plano de aeródromo para movimiento en tierra el ETRS89.
Hay que tener en cuenta que el sistema de referencia ETRS89 que se utilizará para crear
los planos para movimiento en tierra es compatible con el sistema de referencia WGS84
para la creación de rutas y los modelos de superficie, ya que a efectos prácticos son
compatibles. Pero en este proyecto se utilizará ambos sistemas.
3. Antecedentes
La zona hasta hace unos 20 años estaba abandonada y pertenecía al Ejercito del Aire
como campo de Tiro para las aeronaves militares de dicha institución.
Dicha zona se eligió por su buena orografía, buena visual, buena meteorología, y
apartado de zonas pobladas.
Cuando el Ejército del Aire cerró dicha base de Tiro, el Ayuntamiento de Teruel y la Junta
de Aragón empezaron a desarrollar lo que hoy en día es el aeropuerto de Teruel.
Antes de su desarrollo tuvieron que hacer durante un tiempo trabajos topográficos de
la zona para levantamiento de terreno y nivelar la zona de pista, rodaje y plataforma.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
En la página de Enaire.es (Imagen 3) vemos que Teruel solo tiene cartas de navegación
7
del aeródromo (sin el plano de estacionamiento / atraque de aeronaves y sin el plano
de movimiento en tierra) y la carta de navegación de aproximación visual.
Con esto podemos decir que es un aeródromo aún de segundo nivel comparado por
ejemplo con el de Barcelona/El Prat que es de primer nivel:
Imagen 4
Según el anexo 4 de ICAO (ORGANICACION DE AVIACION CIVIL INTERNACIONAL) que es
un organismo especializado de las naciones unidas, las cartas aeronáuticas se clasifican
en:
• Especificaciones generales
• Cartas aeronáuticas 1:10000 / 1:500000 y Escalas
pequeñas
• Cartas de salida normalizada
• Cartas de navegación en ruta
• Cartas de llegada normalizada
• Cartas de aproximaciones
• Por instrumentos, de precisión y de visual
• Cartas de posición
• Cartas de navegación de aérea
• Planos de obstáculos de aeródromo
• Plano estacionamiento y atraque de aeronaves
• Presentación electrónica de Cartas Aeronáuticas.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Recuadro de los tipos de cartas de navegación con sus escalas
8
Según el recuadro el plano a realizar debe de tener una escala entre 1:10000 a 1:20000.
No se pueden hacer planos mayores o menores a esas escalas establecidas por ley.
El plano de aeródromo de obstáculos es el único de los planos de aeródromo que puede
sobre pasar la escala 1:20000 hasta 1:30000.
En el apartado de anexo se pueden ver las cartas de navegación de Teruel ya realizados
y en el glosario sus definiciones.
Anexo 1 (Datos del Aeródromo).
Anexo 2 (ADC – Plano de aeródromo – OACI).
Anexo 3 (AOC – Plano de obstáculos de aeródromo (tipo A) –
OACI)- AOC/1 – RWY 18.
Anexo 4 (AOC – Plano de obstáculos de aeródromo (tipo A) –
OACI)- AOC/2 – RWY 36.
Anexo 5 (VAC – Carta de aproximación visual – OACI).
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
4. Programas a utilizar 9
4.1 ArcGIS
¿Qué es ArcGIS?
ArcGIS es un conjunto de programas del campo de los Sistemas de Información
Geográfica. La compañía que lo comercializa
y lo produce es ESRI, donde se agrupan
varias aplicaciones para hacer análisis,
editar, capturar, tratar, diseñar, publicar e
imprimir datos de información geográfica.
Se engloban en familias temáticas como
ArcGIS Móvil para gestionar y capturar
información del campo o ArcGIS Server, para
la publicación y gestión web.
El ArcGIS Desktop incluye en sus últimas ediciones herramientas como
ArcMap, ArcCatalog, ArcReader, ArcScene y ArcGlobe. También se distribuye
comercialmente en tres niveles de licencias que son ArcView, ArcEditor y ArcInfo.
¿Qué es lo que vamos hacer con ArcGIS?
En este programa nuestro objetivo es diseñar el plano con las herramientas descritas en
el apartado anterior, habrá que saber qué sistema de referencia utilizar, utilizar líneas,
puntos y polígonos para identificar y georreferenciar cualquier objeto o superficie del
aeropuerto. Hay que identificar los taxiways (calles de rodaje) y la pista de aterrizaje.
También habrá que realizar tres modelos de
superficie alternativos para exportalo en un
formato que lo pueda leer el programa que se
va a utilizar. Se crearán también las rutas y se
exportarán para que se lea en la aplicación
GNSS. Habrá que realizar un “back track 4 ” en
las rutas para cuando vayamos hacer un
despegue utilizando la zona de espera como
ayuda, y para aterrizaje lo mismo para ir a la plataforma, ya como hemos dicho las salidas
se encuentran en el centro de la pista y no en la cabeceras como suele ser normal.
4. Backtrack, en inglés, significa dar la media vuelta en la cabecera debido a falta de acceso a la pista por
la cabecera.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Se harán recorridos tanto para cuando se ha aterrizado como para cuando se va a
10
despegar.
Imagen ARCMAP (ARCGIS) Plano de un aeropuerto de EEUU
En la imagen superior podemos observar cómo quedaría un plano de un aeropuerto en
ArcGIS. En el caso de este proyecto el objetivo es diseñar un plano de movimiento en
tierra de las aeronaves. Se creara una Geodatabase5 con su sistema de referencia
correspondiente donde se crearán tanto Feature Class 6 para puntos, líneas y polígonos.
Una forma de digitalizar tanto calles de rodaje, como pista de aterrizaje y plataformas
es añadir una Ortofoto desde el propio ArcGIS.
ArcGIS te da opción de añadir mediante conexión a internet unas capas base de ortofoto
de todo el mundo, donde podemos ir a la zona del proyecto para poder digitalizar las
plataformas y pistas del aeropuerto de Teruel.
Como este aeropuerto es muy moderno muchas Empresas no han actualizado aun las
ortofotos. En la parte de metodología se verá que las ortofotos que se carga en ArcGIS
de la zona del aeropuerto están actualizadas y se podrá digitalizar sin ningún problema,
en cambio sobre las ortofotos de Google Earth no se podría porque no están
actualizadas hoy en día.
5. Geodatabase de ArcGIS es una colección de datasets geográficos de varios tipos contenidos en una
carpeta de sistema de archivos común, una base de datos de Microsoft Access o una base de datos
relacional multiusuario DBMS.
6. Feature Class en ArcGIS, una colección de elementos geográficos con el mismo tipo de geometría (como punto, línea
o polígono), los mismos atributos y la misma referencia espacial. Clases de entidad pueden ser almacenadas en
geodatabases, shapefiles, coberturas, u otros formatos de datos.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
4.2 OruxMaps 11
¿Qué es ORUXMAPS y para qué sirve?
OruxMaps es una aplicación de visualización
gratuita para tabletas y móviles Android. Cuenta
con mapas de navegación GPS y con
características adicionales utilizando mapas en
línea o fuera de línea en muchos idiomas, el
autor de este programa es José Vázquez. Es unas
de las pocas aplicaciones gratuitas en el mundo
y es usado por miles de usuarios mediante la
adición de capacidades en GPS en línea o fuera
de línea para este tipo de dispositivos Android
¿Qué es lo que vamos hacer con OruxMaps?
Este programa de Android es un sistema de navegación donde se puede hacer tus
propios Tracks (rutas) tanto para movimiento
en tierra por carretera como para aviación. Se
puede incluir tanto mapas normales de
carreteras como cartas de navegación para
rutas de vuelo y modelos de superficies en
capas kml.
En este proyecto el objetivo es crear rutas con
líneas desde ArcGIS y expórtalas al programa
de OruxMaps de Android. Se importará el
modelo de superficie realizado en ArcGIS para
el sistema GNSS que lo incluiremos como
fondo que podrá ser utilizado en modo
“offline”.
La pista tiene dos direcciones tanto sur como
norte como hemos hablado antes. Las salidas
serán 3, 2 o 1 dependiendo del modelo
alternativo, donde podremos especificar qué
salida tomar para acceder a la pista tanto Sur
como Norte.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
La pista tiene dos zonas de espera en ambos lados de la pista, en las cabeceras.
12
Estas rutas se guardaran en carpetas e
identificado por nombres, para poder
cargarlos según la pista y calle de rodaje
asignado.
Se importarán los modelos de superficie
para visualizar en modo 2D el
aeropuerto con detalles de pista, pista
de rodaje y plataforma.
En la imagen 6 podemos ver un ejemplo
de ruta asignada de vuelo con una carta
de navegación aérea de fondo. El
resultado de los tracks (rutas) debe ser
así aunque en la imagen sean rutas de
vuelo, no de movimiento en tierra.
El piloto con su Móvil Android podrá
utilizar dicho programa en caso de baja
visibilidad en el aeropuerto o cuando el
aeropuerto no sea conocido.
IMAGEN 6
Este programa también ayudará a los pilotos a identificar las salidas asignada por la torre
de control y así evitar posibles incidentes en caso de que algún otro avión este en rodaje.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
5. Metodología 13
En este apartado explicaremos los pasos para realizar el plano de movimiento en tierra
de aeronaves mediantes ArcGIS y cómo hacer tracks (rutas) y modelos de las superficies
del aeropuerto en el OruxMaps.
5.1 Plano para movimiento en tierra de aeronaves
En ArcGIS como hemos explicado en apartado anterior está compuesto por varios
programas. Los programas a utilizar son el ArcCatalog y el ArcMap.
El primer programa a utilizar es el ArCatalog, donde vamos a crear una Geodatabase con
su sistema de referencia y se creará Feature Class con puntos, líneas y polígonos para
las superficies y objetos en general del plano a desarrollar. Se va a realizar primero la
alternativa con tres salidas, desde ahí haremos los demás planos alternativos. Se seguirá
las normas OACI para el diseño de estos planos, para ello se digitalizará en color y su
simbología seguirá dichas normas luego se diseñará en blanco y negro que será junto al
plano en color el plano que se quiere realizar.
Abrimos el ArcCatalog y seleccionamos la carpeta donde vamos a trabajar:
Creamos una Geodatabase y la nombramos como Caudé:
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Geodatabase /Features Classes
14
Se crean varios Features Classes de polígonos (uno para pista, otro para pista de rodaje,
otro para plataforma, puntos de enlaces de pista con rodaje, hangares….), y líneas y
puntos. Utilizaremos el ETRS89 como sistema de referencia para hacer el Plano con Huso
30N.
Ejemplo de creación de Feature Class de polígonos
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
15
Este proceso es el mismo para todos exceptuando cuando se quiere crear puntos o
líneas, que en la 1º imagen habría que seleccionar el tipo de Feature Class a crear tanto
si es línea como punto o polígono.
El resultado total de Features Classes:
Una vez terminado todas las Feature Classes tenemos que recordar que en caso de que
falte alguno se añadirán durante el proceso de desarrollo del Plano en el ArcMap.
Para ello hay que recordar que en el ArcMap hay un icono que nos lleva directamente al
ArcCatalog en caso de llegar a cabo dicho proceso.
Cerramos el ArcCatalog y abrimos el ArcMap para empezar a crear el Plano.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Una vez abierto el ArcMap se va a la tabla de contenidos se selecciona la carpeta de
16
“layers” y con el botón derecho de ratón se va a propiedades y selecciona el UTM ETRS89
Huso 30N.
Es importante seleccionarlo ya que los Feature Class creados antes están creados con
ese sistema de Referencia:
Añadimos las Features Classes del Geodatabase creada al ArcMap:
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Una vez cargados los Features Classes se va a la pestaña de añadir capa justo al lado de
17
la Escala y le damos a”Add basemap”:
Con esto se puede acceder a capas de ortofotos del aeropuerto para poder digitalizar la
pista calle de rodaje, la plataforma, la pista, las instalaciones…. se selecciona la capa
“Imagery” que viene por defecto en ArcMap.
Nota:
1. Se puede utilizar las otras capas, pero hay que mirar que estén marcadas los límites
de las superficies del aeropuerto.
2. También ArcMap te permite importar mapas desde PNOA, o utilizar formatos shapes
de líneas o polígonos importados de catastro de España.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Al cargase buscamos la zona del aeropuerto:
18
LOCALIZACION DEL AEROPUERTO EN ARCGIS
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Una vez cargado el mapa base, vamos a editor y le damos a “start editing” y
19
seleccionamos primero la capa pista para crearla:
Se va seleccionando las capas que queremos hacer y las creamos, como por ejemplo la
Plataforma: MARRON CLARO
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
20
Instalaciones: MORADO
Pista: EN ROJO
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Pista de Rodaje: VERDE
21
Se añade una Feature Class para las zonas de espera en las cabeceras de pista, creándolo
de la misma manera que las demás Features Classes de tipo polígono:
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Se va al editor de nuevo y se crea la superficie de espera/cambio de sentido en la
22
cabecera:
Ahora se crean las líneas tanto calles de rodaje como las líneas donde de espera a pista
Es importante tener una escala específica en el proyecto ya que al intentar aumentar o
disminuir la escala algunos objetos pueden agrandarse o encogerse, para ello vamos a
propiedades de layers, y en “general” se va a reference scale y ponemos escala 1:4000.
Así podremos mantener la escala de objetos constante:
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Se crea una Feature Class para identificar las entradas a pista (en amarillo) desde la calle
23
de rodaje:
Una vez terminado las superficies líneas y puntos, se incluyen una serie de objetivos en
sí que identificaran como por ejemplo el helipuerto que hay en el aeródromo, los
números de pista… en este apartado la simbología de la plataforma se iguala al de
rodaje.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Por último se nombran las superficies por partes:
24
PISTA: R-1, R-2, R-3, R-4
Calle de rodaje: T-1, T-2, T-3
ENTRADA A PISTA: E-1, E-2, E-3
ENTRADA A PLATAFORMA: G-1, G-2, G-3
Nombraremos también las instalaciones como la terminal, bomberos….
Una vez finalizado todo el resultado sería el siguiente
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Este plano en color sirve para identificar las zonas de cada superficie.
25
Ahora se realiza el plano en blanco y negro que junto al plano en color se identificará los
puntos críticos que son las intersecciones entre calles de rodaje y la pista en lugares
conflictivos del aeropuerto.
Para ellos se crean dos Features Classes, una para la pista, otra para las calles de rodaje
y otra para la plataforma.
Se digitalizará sobre el plano en color, la pista será en negro el resto será zona blanco
con bordes negros para no tener problemas a la hora de identificar las superficies.
Imagen plano 1 blanco y negro
Una vez realizado este plano se identifican los puntos críticos del aeropuerto. Se puede
observar que los puntos críticos son en este caso la E-1, E-2, E-3 y la G-3.
Imágenes puntos críticos plano 1
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Resultado del plano con tres salidas a pista, en el “PLANO 1” se puede ver el plano
26
completo.
Imagen plano 1 según OACI “ver plano 1 apartado planos”
En este plano hay que incluir una capa de señalización de la zona en construcción hasta
que la plataforma esté terminada, una vez terminada la obra en el futuro se actualiza el
plano quitando la capa (WIP). Hay que seguir las normas marcadas en este tipos de
planos (anexo 4 de OACI capítulo 14) por eso la mayoría de planos en movimiento de
tierra de todos los aeropuertos del mundo te marcan solo las coordenadas del
aeropuerto y las coordenadas de estacionamiento de aeronaves y no la cuadrícula
correspondiente. En este tipo de planos se añaden unas flechas que indican el cambio
de la declinación magnética con el norte verdadero. La escala es 1:10000 ya que los
planos de aeródromos tienen que estar entre escalas 1:10000 y 1:20000 exceptuando
el de obstáculos que tiene un límite hasta escala 1:30000. Se añade la resistencia de las
superficies, esta resistencia indica el máximo peso que puede aguantar cuando una
aeronave pasa o estaciona sobre ella. La elevación de la plataforma es de 1108 metros.
Ver Anexo 6 (ejemplo Plano de Gerona).
Nota: La mayor parte de la información es sacada del ANEXO 1.
Este plano es una alternativa con tres salidas a pista, hoy en día está diseñada con solo
salida. La primera salida sería para aviones pequeños o de recreo, la segunda y la tercera
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
serían para aviones de gran tonelaje y superficie alar grandes. El primero tiene una
27
anchura de 10 metros, mientras la segunda es de 27 metros y la tercera de 23 metros.
Para poder orientar el plano de cualquier forma se va a propiedades y en general
ponemos en “rotation” 350º.
El segundo plano alternativo es un plano con solo dos salidas a pista. Este plano
cambiará su aspecto con respecto al de tres salidas, la pista en vez de estar dividida en
4 partes por sus 3 salidas, ahora será tres partes en dos salidas, luego tendrá:
R-1–PISTA
R-2–PISTA
R-3–PISTA
E-1–ENTRADA
E-2–ENTRADA
T-1—CALLE RODAJE
T-2–CALLE RODAJE
G-1—ENTRADA PLATAFORMA
G-2–ENTRADA PLATAFORMA
Con estos datos se copiará la Geodatabase del anterior y se irá modificando tanto la
superficie como los nombres correspondientes de cada superficie:
Imagen plano color plano 2
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Digitalización modo blanco y negro:
28
Imagen plano 2 blanco y negro
Los puntos críticos se señalan en las siguientes imágenes en color:
Imágenes puntos críticos plano 2
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Resultado final del plano con dos salidas, ver “PLANO 2”:
29
Imagen plano 2 ver “plano2 apartado planos”
Esta segunda alternativa se elimina la primera salida del anterior plano, en este caso se
quedarían las dos de mayor anchura.
En este plano se elimina un punto crítico que sería la salida 1º de la anterior, la escala y
el resto de objetos añadidos del plano son los mismos. Las dimensiones de las entradas
y de las calles de rodaje son las mismas.
Este plano, la 1º salida hay que recordar que en la obra ya está hecho el levantamiento
topográfico, si se decide terminar dicha salida este plano sería el definitivo.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
El tercer plano alternativo es un plano con solo una salida a pista y el que debe estar en
30
la página de enaire.es actualizada hoy en día debido a la fase de construcción de una
parte de la plataforma. Este plano cambiará su aspecto con respecto a los anteriores, la
pista está divida en dos partes por una salida, queda constituido de la siguiente forma:
R-1–PISTA
R-2–PISTA
E-1–ENTRADA
T-1—CALLE RODAJE
G-1—ENTRADA PLATAFORMA
Con estos datos se copiará la Geodatabase del anterior y se irá modificando tanto la
superficie como los nombres correspondientes de cada superficie.
Este plano será por ahora el que más se acerca al plano real que buscamos, ya que la
plataforma hoy en día está en construcción parte de ella, y por ahora el acceso 1º de la
segunda alternativa se ha realizado el levantamiento topográfico junto al resto de
plataforma en desarrollo.
Para este último plano hay que tener en cuenta la zona de helicópteros, ya que es la
única zona de la plataforma en construcción (WIP) que está realizada, y el tripulante
helicóptero necesita una clave para poder llegar a pista por la calle de rodaje G-1 en este
caso.
Se elimina el acceso que está en el centro de la plataforma:
Imagen plano 3 color
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Digitalización modo blanco y negro:
31
Imagen plano 3 blanco y negro
Los puntos críticos serían los siguientes:
Imágenes puntos críticos plano 3
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
32
Por último se incluirá la clave descrita anteriormente:
Imagen zona WIP plano 3 “ver plano 3 apartado planos”
Esta clave ayudará al tripulante del helicóptero a dirigirse a la intersección de salida a
pista de rodaje G-1 para posterior salida a pista. Hay que recordar que la mayoría de los
helicópteros hacen su salida a pista en vuelo rasante por las pistas, siguiendo las líneas
de rodaje, por ello en este plano se incluye esta clave, para dar información al tripulante
su recorrido en caso de no tener líneas de rodaje a la vista. Se podrían incluir en los
anteriores planos pero al tener ambas más de una salida, no es necesario implementar
este tipo de clave, al estar la zona del helipuerto muy cercana a esas salidas, y se da por
hecho que las líneas son visibles para el tripulante. Ver “PLANO 3”.
El aeropuerto de Teruel tiene una plataforma detrás del hangar muy amplio donde
permanecerán aviones para reciclaje, este aparcamiento no es necesario incluirlo
dentro de los planos como hemos explicado en la introducción. Hay que recordar que la
zona de helipuerto está formada pero todavía no está integrada en la plataforma, con
ello puede que aún el material de superficie del helipuerto sea provisional.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
5.2 Rutas y modelos de superficie para OruxMaps 33
Antes de utilizar esta aplicación de Android, vamos a crear una Geodatabase y Feature
Class de líneas en ArcMap para crear rutas en la calles de rodaje y pista, para luego
expórtalo en un formato que pueda leer el ORUXMAPS.
En la capa “layers”, en propiedades, seleccionamos el sistema de referencia que será en
este caso el WGS84 30N al ser esta una aplicación de sistema GNSS.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Cargamos la capa base de la ortofoto que viene por defecto en ArcMap y se busca como
34
hicimos anteriormente la zona del aeropuerto:
Con la Geodatabase creada se van creando las rutas tanto para ir a pista como a la
plataforma según la pista donde se desea ir o donde se salga.
Para ello creamos unas carpetas en el directorio según los modelos de superficie
alternativos que se han realizado.
Las rutas correspondiente que se nombraran Despegue y Aterrizaje, dentro de estas
carpetas, habrá otras dos carpeta que serán nombradas 18 y 36, que son las cabeceras
de la pista.
Dentro de estas carpetas guardaran las rutas, para ellos se crean Features Classes de
cada ruta y se exportarán en Formato KML en cada carpeta correspondiente.
Este formato se usa en muchas aplicaciones como Google Earth, y para esta aplicación
de Android.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Con el ArcMap abierto y la ortofoto de base, se va creando las Features Classes según el
35
modelo 1 (tres salidas), ya que haciendo estas rutas de este modelo, haremos las rutas
de los otros modelos alternativos, solo cambiando el nombre del archivo
correspondiente según el nombre de salida y calle de rodaje para los modelos de
superficies que se crearán (tres alternativas) según las salidas que tenga.
Es importante saber que tanto para el aterrizaje y despegue el avión tendrán que pasar
por las superficies que están en los laterales de las cabeceras de la pista para dar la
media vuelta, las rutas pasaran siempre por esas zonas.
EJEMPLO DE FEATURE CLASS PARA RUTA 36-E1-T1-G1
Digitalización de la ruta aterrizaje 36-E3-T3-G3 para modelo 1:
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
36
Para poder exportarlo tenemos que ir al ArcToolsBox, y en “convertion tools”
seleccionamos To KML y seleccionamos “layer to KML”.
Imagen ArcToolBox para to KML
Lo nombramos y lo exportamos a la carpeta plano, aterrizaje, 36 (pista) con una escala
(layer output escale) de 10000.
Imagen ventana Layer to Kml
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
37
Una vez exportado podemos comprobar que funciona la ruta por ejemplo en el Google
Earth:
Imagen de la ruta en Google Earth
Se ve en la imagen que el archivo KML funciona perfectamente. El único inconveniente
es que la ortofoto del Google Earth no está actualizada, pero el archivo está
georreferenciado satisfactoriamente.
Ahora hacemos lo mismo para demás rutas para el modelo 1:
36-E2-T2-G2:
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
38
36-E1-T1-G1:
Una vez realizamos el de aterrizaje por la pista 36, hacemos las rutas de aterrizaje en la
Pista 18:
18-E3-T3-G3
18-E1-T1-G1
18-E2-T2-G2
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Ya terminado las rutas de aterrizaje para ir a plataforma, se realiza las rutas para ir a
39
pista desde la plataforma.
Pista 36
G1-T1- E1-36:
G2-T2- E2-36:
G3-T3- E3-36:
Pista 18:
G1-T1- E1-18:
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
40
G2-T2- E2-18:
G3-T3- E3-18:
Una vez terminado las rutas se exportan todos a KML como se ha explicado antes con el
ejemplo de la primera ruta realizada, y se comprueba en Google Earth antes para ver
que las rutas funcionan correctamente. Hay que recordar que las rutas son para todos
iguales con la diferencia que para cada modelo de superficie tienen uno/dos salidas
menos con respeto al “modelo 1”. Por ello los nombres para cada ruta en un modelo
concreto solo cambia el nombre debido a que la salida se les nombra con nombre
distinto.
Ahora toca a la aplicación OruxMaps.
Enchufando el móvil al puerto USB del ordenador, se accede a las carpetas del OruxMaps
y se meten los archivos KML en la carpeta de TRACKSLOGS de OruxMaps.
Carpeta rutas “directorio del OruxMaps de Android”
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Desconectando el móvil del puerto USB y abrimos el OruxMaps con el móvil:
41
Imágenes de OruxMaps Android Móvil
Cargando el archivo por ejemplo el archivo de la carpeta “Rutas para modelo 1” G1-T1-
E1-36 (despegar pista 36 saliendo por la primera salida) y el archivo 36-E1-T1-G1
(aterriza por la pista 36 y sale por la salida 1), para ello vamos al símbolo de la carretera
y donde pone cargar capa KML/GPX.
Imagen OruxMaps Android “cargar rutas”
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Al dar a Cargar KML/GPX nos abre el directorio de tracklogs con las carpetas del
42
proyecto:
Ejemplo de cómo cargar una ruta exportada desde ArcGIS en OruxMaps
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Cuando se da a cargar nos sale una
43
ventana con unas opciones, te la opción
de invertir la ruta, aviso a la llegada al
destino y grabar la ruta en GPS.
Las opciones de navegación te permiten
grabar el recorrido que se quiere
diseñar, en caso de estar en el
aeropuerto se podría realizar
grabaciones de rutas (tracks) incluso de
waypoints por donde se circula, pero es
mucho más costoso y a la vez mucho
tiempo para realizarlo. Por ello es
mucho más sencillo crear las rutas desde
ArcGis y expórtalos directamente en
formato KML o GPX que son dos
formatos que OruxMaps puede leer.
Opciones de navegación OruxMaps
Nota:
El único fallo que se puede encontrar es
que cuando se carga el archivo no se sabe
por dónde comienza y finaliza, por ello,
cuando se carga y la dirección de las
flechas es contrario a tu ruta, se da a la
opción invertir ruta.
Cuando se carga la ruta como el ejemplo
de la imagen de la derecha, estando tu
posición (no señalada) en la plataforma,
ayudaría a movilizarte por esas calles de
rodaje (G1-T1-E1) hacia la pista 36 por la
primera salida (modelo de superficie 3).
Tendríamos para ello que visualizar los
planos de movimiento en tierra para
reconocer los nombres de las calles de
rodaje y ver los puntos críticos de ese
aeropuerto para evitar desorientarse o
conflictos.
Imagen G1-T1-E1-36
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
44
Imágenes 36-E1-T1-G1 (aterrizar por pista 36, salida 1, modelo superficie 1)
Vemos que los archivo funciona perfectamente y la dirección de la flechas indica por
donde se tiene que ir para dirigirse a la zona de la plataforma o la pista según qué salida
o entrada tomar. Todos los archivos funcionan de la misma manera la única diferencia
es que cada uno tiene tres, dos o una salida dependiendo del modelo de superficie a
desarrollar.
CREAR MODELO DE SUPERIFICE PARA FONDO DE ORUXMAPS:
En OruxMaps puedes descargar en
online mapas de PNOA y de IGN
mediante WMS.
OruxMaps te la opción de integrar tu
propio mapa en modo offline, sin
necesidad de carga mapas o planos en
internet, para ello se va a crear tres
modelos de superficie alternativos, con
simbología muy similar a una ortofoto
para poder identificar bien las salidas,
pista y plataforma.
Se crean Features Classes, simplemente
para digitalizar la zona de nuevo con un
modelo distinto al hecho en ArcGIS
anteriormente para poder leerlo en la
aplicación de Android.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Modelo superficie 1 para OruxMaps con capa topográfica 45
Modelo superficie 2 para OruxMaps con capa topográfica
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Modelo superficie 3 para OruxMaps con capa topográfica 46
Una vez terminando los modelos de superficie se exportan en formato KML ya que este
formato permite que pueda ser leído el OruxMaps como modelo de superficie (no como
ruta como hicimos antes), y por tanto se puede georreferenciar sin ningún problema.
En ArcToolsBox en “convertion tools” seleccionamos To Kml, al abrirse la pestaña
elegimos “map to Kml”.
Ventana ArcToolBox
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Se añade en “input” el archivo de ArcGIS del proyecto, ósea el archivo .mxd (guardado
47
con el diseño de plano que se está visualizando en ese instante) y en el output lo
guardamos en la capeta del proyecto y en “map output scale” ponemos 1:10000.
(Se exportan sin las capas base como puede ser PNOA o Base topográfica, solo con las
capas de superficies realizadas).
Ventana map to KML
Una vez elaborado el KML, podemos cargarlo en Google Earth:
Ejemplo modelo 1 en Google Earth
Viendo que funciona se exporta los dos modelos de superficie alternativos restantes
para OruxMaps.
(Se recuerda que las ortofotos de Google Earth no están actualizadas).
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
GOOGLE EARTH dos salidas:
48
Ejemplo modelo 2 en Google Earth
GOOGLE EARTH una salida:
Ejemplo modelo 3 en Google Earth
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
Ahora conectando otra vez el móvil al Puerto USB del ordenador y guardando los
49
archivos de los planos en “mapsfiles” dentro del directorio de OruxMaps.
Quitando el USB y abriendo el OruxMaps cargando la del modelo1_OruxMaps, dando
en el icono del mapa y en “cargar capa KML”:
Ventana OruxMaps cargar capa Kml
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
El resultado final de los modelos de superficie según las salidas que tenga sería la
50
siguiente: (se han realizado tres modelos distintos de tres, dos y una salida).
EJEMPLO MODELO 1 Formato KML en OruxMaps con base PNOA
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
EJEMPLO MODELO 2 Formato KML en OruxMaps con base IGN
51
También se puede visualizar en 3D con el icono del mapa:
Nota:
Cuando se da a modo 3D, tendrá
que cargarse una malla de terreno
y suele tardar unos minutos,
debido su peso que ronda los 15 y
18 Mb, por ello se necesita tener
acceso a internet.
Imagen icono 3D OruxMaps
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
EJEMPLO MODELO 2 “3D” Formato KML en OruxMaps con PNOA
52
EJEMPLO MODELO 3 Formato KML en OruxMaps con base IGN
Estos tipos de modelos suelen ser muy útiles a la hora de conocer con detalle el
aeropuerto, ya que estos modelos están formados por capas y se pueden sustituir por
las ortofotos del aeropuerto que estén cargadas y se pueden cargar estos modelos en
modo offline en caso de no tener línea. Esto ayudaría al tripulante de cualquier aeronave
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
conocer con detalle las superficies mediante estos sistemas de GNSS y a tiempo real. En
53
caso de que las obras de la plataforma vayan realizándose los archivos inmediatamente
se actualizarían, y así no se esperaría a la
próxima actualización del PNOA, IGN o
cualquier servidor WMS.
Cuando se carga los modelos en modo KML, se
puede ajustar y quitar las capas que se desee.
Dando al icono del mapa cuando la KML está
cargada, se pulsa en Ajustar capas KML, y te
sale una ventana como en la imagen de la
derecha.
Para desactivar una capa hay que apretar
durante más de dos segundos y quedará en
color rojo, si se quiere volver a activar, el
mismo proceso, pulsando sobre él hasta que se
queden las letras de la capa en blanco.
Por ultimo cargamos las rutas que se requiera
sobre las capas del modelo de superficie
cualquiera. Se puede ver en la imagen de abajo
como quedaría el producto final con el ejemplo de modelo 3 con despegue en la pista
18 desde G3-T3-E3.
Modelo 3 despegue pista 18-G3-T3-E3 en OruxMaps
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
6. Simulador de vuelo Google sobre los modelos superficies 54
Este simulador viene por defecto en Google Earth y ayuda a un tripulante de aeronaves
a conocer el aeropuerto antes de realizar el vuelo real. Podemos cargar cualquier
modelo de superficie para el simulador para poder ver con detalle las pistas y plataforma
y ver que el modelo creado está georreferenciado sobre el modelo de malla de Google
Earth. Este simulador nos da unos datos imprescindibles para orientarnos tanto en ejes
“X”, “Y” y sobre todo “Z”. El sistema que utilizada es un HUD (head-up display), que es
un sistema integrado en el avión para dar datos de velocidad, rumbo, altitud, grado de
inclinación del propio avión para poder llegar a pista.
En la imagen de la derecha podemos
ver los parámetros de HUD, los que
están numerados en rojo son los
parámetros geomáticos a explicar.
1. Rumbo magnético
2. Altímetro
3. Variometro
4. Indicador horizonte
artificial
El rumbo magnético ayuda al
tripulante orientarse en vuelo y en
tierra, este último para orientarse en
las calles de rodaje, la plataforma o
pista. Con el plano general y el de movimiento en tierra, observando el número de pista
se puede saber por dónde va a aterrizar o despegar, en la imagen en este caso estaría
entrando en la pista 18 (sur=180º). El altímetro en aviación standard en general, usan
de unidad de medida el pie, equivalente a 0.33 metros, el tripulante con los planos
general y el de movimiento en tierra sabrá que altitud sobre el nivel del mar está la pista
y la plataforma respectivamente, viendo la imagen se sabría (con la ayuda de los planos)
que la pista y la plataforma están a unos 1018 metros sobre el nivel del mar
(aproximadamente unos 3084 pies), así que el avión en la imagen estaría a unos 565
pies (186 metros) del suelo. El variometro ayuda al tripulante a saber cuántos pies están
recorriendo el avión por minuto, en este caso marca en negativo (descendiendo) a unos
-7430 pies por minuto (2451,9 metros por minuto). Con los planos, controlando el
altímetro y el variometro se podría regular el descenso para tomar tierra sin
consecuencias. El indicador de horizonte artificial indica el grado de inclinación vertical
que se encuentra el avión con respecto al horizonte, importante a la hora de tomar tierra
para su ángulo de planeo, con ayuda del altímetro y los planos tanto el general como el
de obstáculos en este caso, este último debido a la ondulación de la superficie de pista,
al no ser esta zona una superficie no nivelada en ciertos tramos.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
7. Resumen/Conclusión 55
El plano de movimientos en tierra de aeronaves y la creación de rutas/ modelos de
superficie para OruxMaps usan sistemas de referencia ETRS89 y WGS84
respectivamente y en efectos prácticos ambos sistemas son muy parecidos. En los dos
proyectos se crean Geodatabases en ArcGis, y dentro de ellas las Features Classes tanto
de polígonos, líneas y puntos para crear los mapas y las rutas.
Se crean tres planos alternativos de movimientos en tierra debido a que la plataforma
está todavía en construcción (solo hay hecho una tercera parte de la plataforma). La
parte de la plataforma en construcción tiene realizado el levantamiento topográfico y
visualizando las ortofotos se pueden ver las posibles dos salidas que podría tener una
vez terminado.
Las superficies como pistas, calles de rodaje se dividen en zonas que se nombran según
las intersecciones que haya.
Los planos de movimiento en tierra se crean según los datos recogidos en el Anexo 1.
Las rutas se crean con Feature Class de líneas y exportadas como capa a KML y los
modelos de superficie para OruxMaps con polígonos y líneas exportándolos como mapa
a KML desde ArcGIS. Dentro del OruxMaps se puede modificar tanto las rutas como las
capas del modelo de superficie. Y se podrán enlazar rutas creadas desde el propio
OruxMaps a las capas de KML creadas.
En conclusión se puede decir que la Geomática y Topografía nos mete en el mundo
aeronáutico tanto en la construcción de aeropuertos recogidos en el Anexo 14 de OACI
como en la creación de cartas de navegación por el Anexo 4.
El sistema que se utiliza para la creación de planos de aeródromo es muy parecido al
que se utilizada para crear mapas/planos en cartografía en general, pero siguiendo las
normas establecidas por la OACI. El
sistema de GNSS en OruxMaps te
permite hacer rutas desde el
mismo aeropuerto, pero es mucho
más complejo, ArcGIS se puede
hacer rutas digitalizando la zona
georreferenciada y sin tener que
estar en dicha zona. Esta forma de
diseñar aeropuertos en 2D para
estas aplicaciones suele hacerlo la
empresa Indra para sus
simuladores de vuelo ya que
utilizan como escenario el Google
Earth.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
56
8. PLANOS
Plano 1: plano de movimiento en tierra tres salidas a pista
Plano 2: plano de movimiento en tierra dos salidas a pista
Plano 3: plano de movimiento en tierra una salida a pista
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
57
Plano 1
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
58
Plano 2
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
59
Plano 3
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
60
9. ANEXOS
Anexo 1: Datos del Aeródromo
Anexo 2: ADC – Plano de aeródromo – OACI
Anexo 3: (AOC-tipo-A)- OACI – AOC/1 – RWY 18.
Anexo 4: (AOC-tipo-A)- OACI – AOC/1 – RWY 36.
Anexo 5: (VAC – Carta de aproximación visual – OACI).
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
61
Anexo 1
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
62
Anexo 2
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
63
Anexo 3
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
64
Anexo 4
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
65
Anexo 5
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
66
Anexo 6
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
10. Glosario 67
Datos del aeródromo
Estos datos tienen como función dar información de todas las características del
aeropuerto tanto como orografía, meteorología, coordenadas, radios de la torre control,
información de las plataformas, de las pistas de rodaje, pistas. Recoge toda la
información posible para que la tripulación pueda acceder a ellas en caso de desconocer
el aeródromo.
Plano del aeródromo
Este plano tiene como función proporcionar información relativa de las operaciones en
el aeródromo a los tripulantes de las aeronaves, facilitando el movimiento de los aviones
en tierra. Este plano proporciona una vista general del aeropuerto desde tierra.
Plano de obstáculos del aeródromo – Tipo A
Este plano tiene como función proporcionar información sobre los obstáculos o
limitaciones que protegen cuando se desciendo o se asciende. Este plano te asegura la
seguridad en caso de fallo en la aeronave desarrollando una actuación mínima
convenida al despegue o aterrizaje, dando información de los obstáculos que hay cerca
del aeropuerto.
Carta de aproximación visual
Esta carta tiene como función proporcionar información que permita a la tripulación
pasar de las fases de ruta del vuelo y de descensos a la aproximación, hasta pista de
aterrizaje prevista mediante la visual.
Plano de aeródromo para movimientos en tierra
El plano da información a la tripulación para facilitar el movimiento en tierra de las
aeronaves, hacia y desde los puestos de estacionamiento de los aviones. La principal
información de este plano son las calles de rodaje y estos planos se publican cuando el
plano del aeródromo no tiene suficiente detalles para el movimiento en tierra de las
aeronaves.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
CAPÍTULO 14. PLANO DE AERÓDROMO PARA MOVIMIENTOS EN TIERRA — OACI
68
ENLACE EN BIBLIOGRAFÍA 14.1 Función
En este plano suplementario se proporcionará a las tripulaciones de vuelo información
detallada que facilite el movimiento de las aeronaves en tierra, desde y hacia los puestos
de estacionamiento de aeronave, y estacionamiento y atraque de las aeronaves.
14.2 Disponibilidad
Recomendación. — Debería proporcionarse el plano de aeródromo para movimientos
en tierra — OACI, en la forma prescrita en 1.3.2 cuando, debido a la congestión de la
información, no puedan indicarse con suficiente claridad en el plano de
aeródromo/helipuerto — OACI los detalles necesarios para el movimiento en tierra de
las aeronaves a lo largo de las calles de rodaje hacia y desde sus puestos de
estacionamiento.
14.3 Cobertura y escala
14.3.1 La cobertura y la escala serán suficientemente grandes para indicar claramente
todos los elementos mencionados en 14.6.
14.3.2 Recomendación. — Debería indicarse una escala lineal.
14.4 Identificación
El plano se identificará mediante el nombre de la ciudad, población o área a la que presta
servicio el aeródromo y el nombre del aeródromo.
14.5 Declinación magnética
14.5.1 Se indicará la flecha del norte verdadero.
14.5.2 Recomendación. — Debería indicarse la declinación magnética redondeada al
grado más próximo y su variación anual.
Nota. — Este plano no debe estar necesariamente orientado según el norte verdadero.
14.6 Datos de aeródromo En este plano se indicará, de manera similar, toda la
información que figure en el plano de aeródromo/helipuerto — OACI correspondiente
a la zona representada, incluyendo:
a) la elevación de la plataforma redondeada al metro o pie más próximo;
b) las plataformas, con sus puestos de estacionamiento de aeronave, su resistencia o las
restricciones debidas al tipo de aeronave, la iluminación, señales y demás ayudas
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
visuales para guía y control, cuando corresponda, incluso el emplazamiento y tipo de los
69
sistemas visuales de guía de atraque;
c) las coordenadas geográficas en grados, minutos, segundos y centésimas de segundo,
de los puestos de estacionamiento de aeronave;
d) las calles de rodaje con sus designaciones, anchura redondeada al metro más
próximo, resistencia o las restricciones debidas al tipo de aeronave cuando corresponda,
la iluminación, señales (incluso los puntos de espera de la pista y, donde se establezcan,
los puntos de espera intermedios), barras de parada, y demás ayudas visuales de guía y
control;
e) donde se establezcan, los lugares críticos con la información adicional debidamente
anotada;
Nota. — La información adicional sobre los lugares críticos puede presentarse en forma
de tabla en el anverso o en el reverso del plano.
f) cuando se establezcan, las rutas normalizadas para el rodaje de aeronaves, con sus
designadores;
g) las coordenadas geográficas en grados, minutos, segundos y centésimas de segundo,
de los puntos apropiados de eje de calle de rodaje; h) los límites del servicio de control
de tránsito aéreo;
i) las instalaciones pertinentes de comunicaciones, enunciadas con sus canales y, si
corresponde, la dirección de conexión;
j) los obstáculos para el rodaje;
k) las zonas de servicios para las aeronaves y edificios de importancia para las
operaciones;
l) el punto de verificación del VOR y la radiofrecuencia de la ayuda correspondiente;
m) toda parte del área de movimiento representada que sea permanentemente
inapropiada para el tránsito de aeronaves, claramente identificada como tal.
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
PLANO DE AERÓDROMO PARA MOVIMIENTO EN TIERRA Y RUTAS/MODELOS DE
SUPERFICIE PARA APLICACIONES DE SISTEMA GNSS
11. Bibliografía 70
http://www.aeropuertodeteruel.com/
BLOQUE II: Sistemas de Proyección y Cartografía Aeronáutica TEMA 7 Cartografía
Aeronáutica (UPV)
http://help.ArcGIS.com/es/ArcGISdesktop/10.0/help/index.html#//00v20000000p000
000
http://www.OruxMaps.com/manual.html
http://www.icao.int/Pages/default.aspx
http://www.icao.int/publications/Documents/9864_6ed_es.pdf
http://www.proteccioncivil.es/catalogo/carpeta02/carpeta24/vademecum12/vdm025
15ar/anexos%201%20a%2018.pdf
http://www.enaire.es/csee/Satellite/navegacion-
aerea/es/Page/1078418725163/?other=1083158950596&other2=1237562802373#an
cla354
IMPORTANTE: NORMAS OACI ANEXO 4 ENLACE DE ABAJO (VER PAGINA 67 EN CASO DE
PROBLEMA DE DESCARGA)
http://apw.cancilleria.gov.co/tratados/AdjuntosTratados/c0d08_OACI-
1944%20ANEXO%20IV.PDF
PABLO FERNÁNDEZ DE BOBADILLA SÁNCHEZ INGENIERÍA GEOMÁTICA Y TOPOGRAFÍA
UNIVERSIDAD POLITÉCNICA DE VALÉNCIA
También podría gustarte
- Proceso de Construccion de AeropuertoDocumento36 páginasProceso de Construccion de AeropuertoBeltran Puma G100% (13)
- Domine Los Drones, Guía Básica para Comenzar a Ganar Dinero con los Drones: Fotografía/Comercial, Tecnología e Ingeniería, RobóticaDe EverandDomine Los Drones, Guía Básica para Comenzar a Ganar Dinero con los Drones: Fotografía/Comercial, Tecnología e Ingeniería, RobóticaCalificación: 5 de 5 estrellas5/5 (1)
- El Area Terminal de Los Aeropuertos - Vicente CudosDocumento1041 páginasEl Area Terminal de Los Aeropuertos - Vicente CudosAdrianM-g100% (2)
- LEGISLACIÓN AERONÁUTICA I - Banco de Preguntas (Delta 1.1) PDFDocumento9 páginasLEGISLACIÓN AERONÁUTICA I - Banco de Preguntas (Delta 1.1) PDFMarkos Flores100% (1)
- Montaje y reparación de sistemas neumáticos e hidráulicos bienes de equipo y máquinas industriales. FMEE0208De EverandMontaje y reparación de sistemas neumáticos e hidráulicos bienes de equipo y máquinas industriales. FMEE0208Aún no hay calificaciones
- Señalización de AeropuertosDocumento50 páginasSeñalización de AeropuertosVíctor Nicolás Rodriguez BravoAún no hay calificaciones
- Acta de Asamblea para Ampliación Del Objeto SocialDocumento7 páginasActa de Asamblea para Ampliación Del Objeto SocialBibiana NeriAún no hay calificaciones
- 2022-1 Aeropuertos (1217)Documento7 páginas2022-1 Aeropuertos (1217)Favian DmdAún no hay calificaciones
- Práctica 3Documento3 páginasPráctica 3lucas quiroz hurtadoAún no hay calificaciones
- Introduccion A Un Proyecto de AeropuertosDocumento11 páginasIntroduccion A Un Proyecto de AeropuertosRamon SalgadoAún no hay calificaciones
- Aeropuerto InformeDocumento6 páginasAeropuerto Informebryan espejo falenAún no hay calificaciones
- AeropuertosDocumento34 páginasAeropuertosjere.tequi45Aún no hay calificaciones
- Etsi Aeronáutica y Del EspacioDocumento8 páginasEtsi Aeronáutica y Del Espaciojonathan bAún no hay calificaciones
- Aeropuertos. Unidad 3 y 4Documento11 páginasAeropuertos. Unidad 3 y 4Juan Manuel Rivas Tonito100% (1)
- Analisis SDP Compañia Aerea Espigon Sur t1Documento11 páginasAnalisis SDP Compañia Aerea Espigon Sur t1Atc LatinoAún no hay calificaciones
- Capacidad de Un AeropuertoDocumento16 páginasCapacidad de Un AeropuertoSantitos RubiñosAún no hay calificaciones
- Aeropuertos 1Documento6 páginasAeropuertos 1Maria Paula AlfonsoAún no hay calificaciones
- Tema 3 Lado AireDocumento90 páginasTema 3 Lado AireIvan Cho67% (3)
- Ampliacion Cabecera 08 Aeropuerto Interancional Matecaña DefinitivoDocumento6 páginasAmpliacion Cabecera 08 Aeropuerto Interancional Matecaña DefinitivoSteve Eduardo ReyesAún no hay calificaciones
- Trabajo de Aeropuertos Grupo 5Documento23 páginasTrabajo de Aeropuertos Grupo 5Anonymous ZBdivmRoAún no hay calificaciones
- Trazo Geometrico Del Campo de VueloDocumento51 páginasTrazo Geometrico Del Campo de VueloCesar Quiroz Viera100% (2)
- CA - 314-2.1.1-2018 - FinalDocumento21 páginasCA - 314-2.1.1-2018 - FinalDavid DanielAún no hay calificaciones
- VALLEDUPAR E13 - Resumen Ejecutivo SKVP FinalDocumento41 páginasVALLEDUPAR E13 - Resumen Ejecutivo SKVP FinalJorgeAún no hay calificaciones
- Preguntas AdicionalesDocumento25 páginasPreguntas AdicionalesYordyWilliamsCaceresQuispeAún no hay calificaciones
- Sistema Aereoportuario de SantiagoDocumento52 páginasSistema Aereoportuario de SantiagoEdgar ZelayaAún no hay calificaciones
- 01 El-Area-Terminal-de-los-Aeropuertos-Vicente-Cudos PDFDocumento1041 páginas01 El-Area-Terminal-de-los-Aeropuertos-Vicente-Cudos PDFMiguelCHAún no hay calificaciones
- Informe de Diagnostico Del Balizaje Del AAJS-27-12-2022Documento29 páginasInforme de Diagnostico Del Balizaje Del AAJS-27-12-2022luis rondonAún no hay calificaciones
- Aeropuerto ELECTIVA VDocumento15 páginasAeropuerto ELECTIVA VTaly AndreinaAún no hay calificaciones
- Cap-6-1 Edificios Terminales de PasajerosDocumento24 páginasCap-6-1 Edificios Terminales de PasajerosMariano GranateAún no hay calificaciones
- SMGCS AtmDocumento12 páginasSMGCS Atmandrea martin santa olallaAún no hay calificaciones
- Aeropuertos en Ingenieria CivilDocumento76 páginasAeropuertos en Ingenieria CivilJoelHuamayalliAún no hay calificaciones
- Aeropuerto HuanucoDocumento22 páginasAeropuerto HuanucoHuaquisto BrigAún no hay calificaciones
- TRANSPORTE AEREO - FIO UNaMDocumento9 páginasTRANSPORTE AEREO - FIO UNaMCortez CamiAún no hay calificaciones
- Especificaciones Técnicas de Los AeropuertosDocumento13 páginasEspecificaciones Técnicas de Los Aeropuertoscarlos zeaAún no hay calificaciones
- Infraestructura AeropuertosDocumento351 páginasInfraestructura AeropuertosGuillermo QuijanoAún no hay calificaciones
- CT 154.004 - Cálculo de Distancias DeclaradasDocumento19 páginasCT 154.004 - Cálculo de Distancias DeclaradasMariano BonoperaAún no hay calificaciones
- Especificaciones TécnicasDocumento49 páginasEspecificaciones TécnicasDante Reynaldo VelardeAún no hay calificaciones
- ProyectosDocumento3 páginasProyectosadonisAún no hay calificaciones
- RAC 14 - Aeródromos, Aeropuertos y HelipuertosDocumento298 páginasRAC 14 - Aeródromos, Aeropuertos y Helipuertos86061234871Aún no hay calificaciones
- RIOHACHA E13 - Resumen Ejecutivo SKRH - v4 - 200815 - FinalDocumento38 páginasRIOHACHA E13 - Resumen Ejecutivo SKRH - v4 - 200815 - FinalJorgeAún no hay calificaciones
- Ensayo, Exposiciones.Documento4 páginasEnsayo, Exposiciones.niurkaAún no hay calificaciones
- AeropuertosDocumento34 páginasAeropuertosLorena Luna Enriquez100% (2)
- Informe de AeropuertosDocumento19 páginasInforme de AeropuertosjavierAún no hay calificaciones
- Operaciones y mantenimiento en compañías aéreasDe EverandOperaciones y mantenimiento en compañías aéreasAún no hay calificaciones
- Anexo 14Documento7 páginasAnexo 14Angelica Martinez100% (1)
- Anexo 4Documento32 páginasAnexo 4jryykhc6ngAún no hay calificaciones
- Cartas AeronauticasDocumento16 páginasCartas AeronauticasLuiis CardonaAún no hay calificaciones
- AeródromoDocumento40 páginasAeródromoDahilmar DiazAún no hay calificaciones
- Zonas AeroportuariasDocumento54 páginasZonas AeroportuariasMiguel Angel RodriguezAún no hay calificaciones
- Ampliacion Cabecera 08 Aeropuerto Interancional Matecaña DefinitivoDocumento6 páginasAmpliacion Cabecera 08 Aeropuerto Interancional Matecaña DefinitivojuvermcAún no hay calificaciones
- Trabajo Final Gestion de EquiposDocumento41 páginasTrabajo Final Gestion de EquiposAlfonso Lescano RamirezAún no hay calificaciones
- Tema 2 AerodromosDocumento109 páginasTema 2 AerodromoszetareAún no hay calificaciones
- Aic 07-20 Proy - de Ampliacion Aeropuerto SPJCDocumento7 páginasAic 07-20 Proy - de Ampliacion Aeropuerto SPJCOlivier LaylyAún no hay calificaciones
- Aropuertos Trazado, Control y Dispocicion Del Trazado AereoDocumento15 páginasAropuertos Trazado, Control y Dispocicion Del Trazado AereoJESSICA VARGASAún no hay calificaciones
- Aeropuerto SDocumento14 páginasAeropuerto SLuis López RodriguezAún no hay calificaciones
- Practica Visita Al Aeropuerto de Granada-JaénDocumento11 páginasPractica Visita Al Aeropuerto de Granada-JaénISIDRO GONZALEZ DIAZAún no hay calificaciones
- Aeropuertos NSADocumento10 páginasAeropuertos NSAAndinoAún no hay calificaciones
- Trabajo de Obras Accesorias de Un AeropuertoDocumento44 páginasTrabajo de Obras Accesorias de Un Aeropuertomiguel angelAún no hay calificaciones
- Especificaciones TécnicasDocumento48 páginasEspecificaciones TécnicasDante VelardeAún no hay calificaciones
- ACTIVIDAD 9. Emplazamiento de Un AeropuertoDocumento4 páginasACTIVIDAD 9. Emplazamiento de Un AeropuertoanaagamboaAún no hay calificaciones
- Informe N2 de GutierresDocumento10 páginasInforme N2 de GutierresEsther Guillen GonzalesAún no hay calificaciones
- Diccionario de términos aeronáuticos. Inglés-EspañolDe EverandDiccionario de términos aeronáuticos. Inglés-EspañolAún no hay calificaciones
- Ley de Aeronáutica CivilDocumento41 páginasLey de Aeronáutica CivilJABL5Aún no hay calificaciones
- Decreto 40 - 12 AGO 2013Documento126 páginasDecreto 40 - 12 AGO 2013Jorge Brower GougainAún no hay calificaciones
- SuperficieHorizontalInterna ConicaDocumento10 páginasSuperficieHorizontalInterna ConicaPako NorimotoAún no hay calificaciones
- Tu PasabordoDocumento1 páginaTu PasabordoJose Daniel MazaAún no hay calificaciones
- APP Casos de Estudio en Perú - Primer Grupo de AeropuertosDocumento76 páginasAPP Casos de Estudio en Perú - Primer Grupo de AeropuertosangieagostinigAún no hay calificaciones
- MASS-POL-02 Politica de Requerimiento MASSDocumento10 páginasMASS-POL-02 Politica de Requerimiento MASSMarcel GamezAún no hay calificaciones
- 13.actividades Distributivas para Cuarto Grado de SecundariaDocumento5 páginas13.actividades Distributivas para Cuarto Grado de SecundariaEpi RodriguezAún no hay calificaciones
- Línea de Tiempo Huelga AviancaDocumento8 páginasLínea de Tiempo Huelga Aviancamagda yorlenyAún no hay calificaciones
- ZeltzinDocumento4 páginasZeltzinZeltzinAún no hay calificaciones
- Base de DatosDocumento1 páginaBase de DatosLuis Amaro Villanueva TapiaAún no hay calificaciones
- PRACTICAS DE TALLERES - Guión 02Documento27 páginasPRACTICAS DE TALLERES - Guión 02javier carrascoAún no hay calificaciones
- TrabajoNro4 GESTION ADocumento3 páginasTrabajoNro4 GESTION ARichard Junior Copara LabraAún no hay calificaciones
- 1 Julio Edición Diario Del HuilaDocumento20 páginas1 Julio Edición Diario Del HuilaJhon FigueroaAún no hay calificaciones
- Manual de Capacitacion de BomberosDocumento54 páginasManual de Capacitacion de BomberosWilman Manuel Chávez JimenezAún no hay calificaciones
- Procedimientos S E N E A MDocumento361 páginasProcedimientos S E N E A MCadete del AireAún no hay calificaciones
- Importación de Denim - PPTMDocumento48 páginasImportación de Denim - PPTMsalmonAún no hay calificaciones
- Raac Parte 60Documento31 páginasRaac Parte 60gianellaAún no hay calificaciones
- Res Ejec Proyecto SNPLMéxicoDocumento61 páginasRes Ejec Proyecto SNPLMéxicoSusana CorreaAún no hay calificaciones
- Col-15 - 53-GiaDocumento19 páginasCol-15 - 53-GiaAlejandro Apache FrancoAún no hay calificaciones
- Fundamentos MantenimientoDocumento75 páginasFundamentos MantenimientoGermánAún no hay calificaciones
- Análisis de VentasDocumento113 páginasAnálisis de VentasMaria Soraya Serna TorresAún no hay calificaciones
- Informe Visita Técnica AeropuertoDocumento7 páginasInforme Visita Técnica AeropuertoTirofijo19 SanpaAún no hay calificaciones
- Lic Piloto PRI-A - Procedimientos de ComunicaciónDocumento9 páginasLic Piloto PRI-A - Procedimientos de ComunicaciónDaniel ArmijoAún no hay calificaciones
- Caso South West PDFDocumento11 páginasCaso South West PDFJuanAún no hay calificaciones
- Seguridad de La AviaciónDocumento21 páginasSeguridad de La AviaciónLady Laura Sierra RuizAún no hay calificaciones
- Anexo 1 Anexo TecnicoDocumento31 páginasAnexo 1 Anexo TecnicoYuri DumaAún no hay calificaciones
- Derecho Aeronáutico, Monografia)Documento27 páginasDerecho Aeronáutico, Monografia)Ofelia YarlequeAún no hay calificaciones