NEWTON EULER Esferico
NEWTON EULER Esferico
Descargar como pdf o txt
También podría gustarte
- Modelado y Control Cinemático de Un Robot de Seis Grados de Libertad (KUKA120)Documento25 páginasModelado y Control Cinemático de Un Robot de Seis Grados de Libertad (KUKA120)Morgan G. Vásquez100% (5)
- Taller No6 Mecania Del MDocumento15 páginasTaller No6 Mecania Del MAndres PachecoAún no hay calificaciones
- Modelo Dinámico 2R-P PDFDocumento15 páginasModelo Dinámico 2R-P PDFMarco RodríguezAún no hay calificaciones
- Cinemática Directa de Un Robot SCARADocumento24 páginasCinemática Directa de Un Robot SCARAcss_unac100% (6)
- Deber 3 - Cinemática de Robots IndustrialesDocumento5 páginasDeber 3 - Cinemática de Robots IndustrialesCristian UrrestaAún no hay calificaciones
- Matriz de TransformaciónDocumento8 páginasMatriz de TransformaciónpactroAún no hay calificaciones
- Brazo Robotico de 5 GLDDocumento15 páginasBrazo Robotico de 5 GLDWALTER MAX MONTAÑO CAMACHOAún no hay calificaciones
- Funciones Comandos en MatlabDocumento11 páginasFunciones Comandos en Matlabjohnelectronica50% (2)
- Modelamiento y Simulación de Péndulo InvertidoDocumento19 páginasModelamiento y Simulación de Péndulo InvertidoJames BenavidesAún no hay calificaciones
- GuiaDocumento12 páginasGuiaLuis Fernando Lima GomezAún no hay calificaciones
- Toolbox Robótica de MATLABDocumento4 páginasToolbox Robótica de MATLABEric PierceAún no hay calificaciones
- Yacimientos de Hidrocarburos en Sistemas Karsticos PDFDocumento285 páginasYacimientos de Hidrocarburos en Sistemas Karsticos PDFAngie SalasAún no hay calificaciones
- Facilidades de ProducciónDocumento55 páginasFacilidades de ProducciónBheto ReyesAún no hay calificaciones
- Cinemática de Brazo Manipulador de 2 GDL SalomonDocumento8 páginasCinemática de Brazo Manipulador de 2 GDL Salomonjuanillofc100% (5)
- Informe 1 Robo2 FinalDocumento24 páginasInforme 1 Robo2 FinalWILLIAM BERRIOS ROJASAún no hay calificaciones
- Examen Robotica Unidad3Documento10 páginasExamen Robotica Unidad3alejandrocamposgarcia777Aún no hay calificaciones
- Toolbox Robotica en MatlabDocumento35 páginasToolbox Robotica en MatlabWilliams Ayala100% (1)
- Cinematica InversaDocumento27 páginasCinematica InversaHector GuerreroAún no hay calificaciones
- Tema 3 - Cinemática Del RobotDocumento49 páginasTema 3 - Cinemática Del Robotxabiermikel.cAún no hay calificaciones
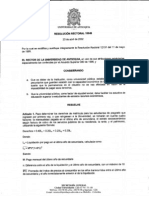
- RR 15849Documento6 páginasRR 15849Universidad de Antioquia100% (2)
- Robotica Con MatlabDocumento17 páginasRobotica Con MatlabJE JosephAún no hay calificaciones
- MatrizJacobiana 2020Documento46 páginasMatrizJacobiana 2020drake JonasAún no hay calificaciones
- MATLAB (Manual Programacion Interface Vectores - 2da Edicion)Documento111 páginasMATLAB (Manual Programacion Interface Vectores - 2da Edicion)FIDEL TOMAS MONTEZA ZEVALLOSAún no hay calificaciones
- Estructura Mecanica de Un RobotDocumento21 páginasEstructura Mecanica de Un RobotPalmeras01Aún no hay calificaciones
- Analisis de Un Robot Manipulador Scara ARTICULODocumento22 páginasAnalisis de Un Robot Manipulador Scara ARTICULOcarlos.otiniano9811Aún no hay calificaciones
- Lab Nº2 - Matrices de Rotación - 2015-I PDFDocumento4 páginasLab Nº2 - Matrices de Rotación - 2015-I PDFAndree Gutierrez SucllaAún no hay calificaciones
- T6 - Modelo Matematico Robot 3 GradosDocumento3 páginasT6 - Modelo Matematico Robot 3 GradosSalvador OlmosAún no hay calificaciones
- PRACTICA #1 DE ROBÓTICA - Transformaciones Espaciales y Matriz de RotacionDocumento24 páginasPRACTICA #1 DE ROBÓTICA - Transformaciones Espaciales y Matriz de RotacionJerry Rodriguez FloresAún no hay calificaciones
- Práctica RobóticaDocumento11 páginasPráctica RobóticaRichi PérezAún no hay calificaciones
- Examen 1Documento2 páginasExamen 1Lyus88Aún no hay calificaciones
- Cinematica Directa e Inversa-2009Documento64 páginasCinematica Directa e Inversa-2009Betoys58580100% (1)
- TRAYECTORIASDocumento23 páginasTRAYECTORIASCarlos VazquezAún no hay calificaciones
- Lab Nº1 - Morfología Del Robot - 2013-IDocumento11 páginasLab Nº1 - Morfología Del Robot - 2013-IMauricio LewisAún no hay calificaciones
- OPERADORES CINEMÁTICOS Roger Miranda ColoradoDocumento53 páginasOPERADORES CINEMÁTICOS Roger Miranda ColoradoGustavo CamachoAún no hay calificaciones
- PRÁCTICA #1 Robotica - 2020Documento24 páginasPRÁCTICA #1 Robotica - 2020JUAN ANTONIO MARQUEZ CORNEJOAún no hay calificaciones
- Lab 4Documento2 páginasLab 4chrflomAún no hay calificaciones
- Practica 1.Documento17 páginasPractica 1.Roberto AguilarAún no hay calificaciones
- P1 Lab RoboticaDocumento5 páginasP1 Lab Roboticagian123Aún no hay calificaciones
- Cinematic A Directa e InversaDocumento22 páginasCinematic A Directa e InversaILiana Mendivil100% (1)
- Laboratorio 3 Servomotores Robótica UPNDocumento5 páginasLaboratorio 3 Servomotores Robótica UPNPrimus 2018Aún no hay calificaciones
- Practica4 - ROBOTICAS MATLABDocumento15 páginasPractica4 - ROBOTICAS MATLABferocilloAún no hay calificaciones
- Lab Nº3 - Orientación Espacial - 2019 - ImparDocumento6 páginasLab Nº3 - Orientación Espacial - 2019 - ImparAnonymous 9PUWc98ymAún no hay calificaciones
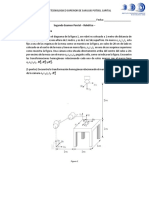
- Segundo Examen Parcial RoboticaDocumento3 páginasSegundo Examen Parcial RoboticaLuis Guillermo Cervantes ChávezAún no hay calificaciones
- Robot Cilindrico R - Practica1Documento6 páginasRobot Cilindrico R - Practica1Carlos FuentesAún no hay calificaciones
- Sistemas Flotantes de ProducciónDocumento1 páginaSistemas Flotantes de ProducciónmauricioAún no hay calificaciones
- 1.matrices de RotacionDocumento34 páginas1.matrices de RotacionFrancisco ZalamancaAún no hay calificaciones
- Matlab RoboticaDocumento19 páginasMatlab Roboticajagm2000100% (1)
- Robotica Industrial Herramientas Matemáticas para La Localización IndustrialDocumento34 páginasRobotica Industrial Herramientas Matemáticas para La Localización Industrialcorpses88Aún no hay calificaciones
- Crea Robot Con MATLABDocumento10 páginasCrea Robot Con MATLABAndre Williams Montenegro SalcedoAún no hay calificaciones
- NEWTON EULER CartesianoDocumento17 páginasNEWTON EULER CartesianoFatima MoralesAún no hay calificaciones
- NEWTON EULER CilindricoDocumento19 páginasNEWTON EULER CilindricoFatima MoralesAún no hay calificaciones
- Tarea 9Documento7 páginasTarea 9virginia.ch.ing.eltAún no hay calificaciones
- InformeDocumento18 páginasInformePaola Maribel GuamanAún no hay calificaciones
- CALCULOSDocumento22 páginasCALCULOSOmar SánchezAún no hay calificaciones
- Fundamentos Robotica U04Documento26 páginasFundamentos Robotica U04Rodrigo Rato MartinezAún no hay calificaciones
- ANEXO de FuncionesDocumento22 páginasANEXO de FuncionesAlvaroFernandezVillarAún no hay calificaciones
- Control 3 Ejercicios Resueltos ComputacionDocumento11 páginasControl 3 Ejercicios Resueltos ComputacionJack JonhsonAún no hay calificaciones
- Capitulo4 1Documento78 páginasCapitulo4 1snoops961Aún no hay calificaciones
- Cinemática Del Robot PolarDocumento16 páginasCinemática Del Robot PolarERNESTOAún no hay calificaciones
- Campo de movimiento: Explorando la dinámica de la visión por computadora: campo de movimiento reveladoDe EverandCampo de movimiento: Explorando la dinámica de la visión por computadora: campo de movimiento reveladoAún no hay calificaciones
- Gráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraDe EverandGráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraAún no hay calificaciones
- Anual Uni-Semana 03 FísicaDocumento28 páginasAnual Uni-Semana 03 FísicaMarco Antonio Palacios Reyes0% (1)
- Cinetica Tridimensional de Un Cuerpo RigidoDocumento31 páginasCinetica Tridimensional de Un Cuerpo RigidoAnthony García TorresAún no hay calificaciones
- Material GuiaMov1Documento26 páginasMaterial GuiaMov1MARIA CAMILA SERRANO CAROAún no hay calificaciones
- Informe VectoresDocumento6 páginasInforme VectoresDaniela Ramirez OspinaAún no hay calificaciones
- FisicaDocumento3 páginasFisicaGolden ChildAún no hay calificaciones
- Cinematica-Movimento Rectilineo TeoriaDocumento9 páginasCinematica-Movimento Rectilineo TeoriaFelix LeonAún no hay calificaciones
- Clase de Física 6Documento23 páginasClase de Física 6Rolando AnchundiaAún no hay calificaciones
- Cinematica FisicaDocumento33 páginasCinematica FisicaIvan Hagler Becerra VasquezAún no hay calificaciones
- Trabajo FisicaDocumento49 páginasTrabajo FisicaEmmanuel Perales MonteroAún no hay calificaciones
- Semana 4 - Infografía - Cinemática Del Cuerpo RígidoDocumento15 páginasSemana 4 - Infografía - Cinemática Del Cuerpo RígidoJulio FloresAún no hay calificaciones
- Manual General de MecanismosDocumento71 páginasManual General de MecanismosDiego Ivan Sosa HernandezAún no hay calificaciones
- Fisica V 3.0 Esquiu-1Documento121 páginasFisica V 3.0 Esquiu-1Diego María AlcayagaAún no hay calificaciones
- Guía #2. Grado 7. Ciencias Naturales y Medio Ambiente (Integrada) - Primer Período 2021Documento4 páginasGuía #2. Grado 7. Ciencias Naturales y Medio Ambiente (Integrada) - Primer Período 2021St GeorgeAún no hay calificaciones
- D - Clase 01Documento35 páginasD - Clase 01Edgardo Asencio SevillanoAún no hay calificaciones
- Fisica - 1 - BGU (1) - 25-56Documento32 páginasFisica - 1 - BGU (1) - 25-56pascalelasoAún no hay calificaciones
- TALLER FisicaDocumento8 páginasTALLER FisicaJohan Cervantes PizarroAún no hay calificaciones
- Tema 2 Cinematica de La Partícula1Documento34 páginasTema 2 Cinematica de La Partícula1Rubén LozanoAún no hay calificaciones
- Análisis de Mecanismos de PalancasDocumento18 páginasAnálisis de Mecanismos de PalancasCesar GonzalezAún no hay calificaciones
- Mapas ConceptualesDocumento6 páginasMapas ConceptualesHenry QuishpeAún no hay calificaciones
- La Aceleración Metodo Analitico y GraficoDocumento2 páginasLa Aceleración Metodo Analitico y GraficoLuis PulloquingaAún no hay calificaciones
- Centros de Rotacion Cuerpo RigidoDocumento79 páginasCentros de Rotacion Cuerpo RigidoRodney FigueroaAún no hay calificaciones
- Planificación Semana 15 A 28 Física 1ro Bgu Segundo Trimestre - VideoDocumento20 páginasPlanificación Semana 15 A 28 Física 1ro Bgu Segundo Trimestre - VideoElenita SaltosAún no hay calificaciones
- Vector de PosicionDocumento10 páginasVector de Posicionantoninox67% (3)
- 6 Ciencias Naturales JM JTDocumento17 páginas6 Ciencias Naturales JM JTANGEL RAFAEL ANAYA PUERTAAún no hay calificaciones
- EjerciciosDocumento11 páginasEjerciciosAlejandra CastroAún no hay calificaciones
- Fisica Ingreso Cap.5Documento14 páginasFisica Ingreso Cap.5PepeAún no hay calificaciones
- Semana 1 - Equilibrio de Una PartículaDocumento18 páginasSemana 1 - Equilibrio de Una PartículaMajo GutierrezAún no hay calificaciones
- Qué Es Cinemática ForoDocumento6 páginasQué Es Cinemática ForoRoselyn AlcantaraAún no hay calificaciones
- Documento Complementario de Unidad 1Documento25 páginasDocumento Complementario de Unidad 1Ines Paola Orozco MelendezAún no hay calificaciones