Ejercicios 11.6
Ejercicios 11.6
Descargar como pdf o txt
También podría gustarte
- Modelo de Parcial Algebra UBA XXI 4Documento3 páginasModelo de Parcial Algebra UBA XXI 4Martín BustamanteAún no hay calificaciones
- Ejercicios de Denis ZillDocumento141 páginasEjercicios de Denis ZillCamilo OchoaAún no hay calificaciones
- Tema1 6Documento6 páginasTema1 6Juan Francisco Gutierrez HernandezAún no hay calificaciones
- Deber Calculo ProblemasDocumento4 páginasDeber Calculo ProblemasJonathan David Sánchez Chamorro0% (1)
- 8 - La Recta en El PlanoDocumento2 páginas8 - La Recta en El PlanoHarim02Aún no hay calificaciones
- Taller 2Documento2 páginasTaller 2Ana maríaAún no hay calificaciones
- Taller N°4 - Algebra Lineal IDocumento2 páginasTaller N°4 - Algebra Lineal IMaria Paula OrtizAún no hay calificaciones
- 4to Examen de Rectas y Planos - Ints. 2017Documento1 página4to Examen de Rectas y Planos - Ints. 2017Mariela LezamaAún no hay calificaciones
- Taller 2 PDFDocumento5 páginasTaller 2 PDFDaniel Antonio Vanegas CanoAún no hay calificaciones
- Geometria Afin EjerciciosDocumento4 páginasGeometria Afin Ejerciciosniwep59990Aún no hay calificaciones
- MaterialGeoEspacio 2020Documento10 páginasMaterialGeoEspacio 2020Ernesto Americo Hidalgo CastellanosAún no hay calificaciones
- Practica Geo-An.Documento7 páginasPractica Geo-An.Fabi Montoya100% (1)
- Portafolio 5 Práctica Álgebra LinealDocumento20 páginasPortafolio 5 Práctica Álgebra LinealEdwin Villalobos MartínezAún no hay calificaciones
- Cambio de Coordenadas MultivariadoDocumento4 páginasCambio de Coordenadas MultivariadoSalazar Mendoza DanielaAún no hay calificaciones
- Ejercicios Resueltos Sobre La Recta en El Espacio IIDocumento8 páginasEjercicios Resueltos Sobre La Recta en El Espacio IIVictor OlivaresAún no hay calificaciones
- Lista Ef 2023 2Documento2 páginasLista Ef 2023 2Stefano Giacomo Landa MoranteAún no hay calificaciones
- Listado 2Documento1 páginaListado 2rlagos.soleAún no hay calificaciones
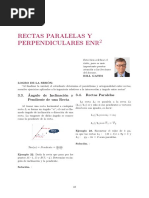
- S01 - s2 - Rectas Paralelas y PerpendicularesDocumento6 páginasS01 - s2 - Rectas Paralelas y PerpendicularesYul Yanet HuamaniAún no hay calificaciones
- 2017-01 Guia-12 R3Documento12 páginas2017-01 Guia-12 R3laycubaAún no hay calificaciones
- Imi Semana - 5 Sesion 1Documento5 páginasImi Semana - 5 Sesion 1Omar Cristian Arapa QuispeAún no hay calificaciones
- Algebra Lineal Grupo 10 Taller 2Documento266 páginasAlgebra Lineal Grupo 10 Taller 2Felipe Chaves DelgadilloAún no hay calificaciones
- Recta en R2-Mb-Epis-2023-BDocumento2 páginasRecta en R2-Mb-Epis-2023-BVictor VeraAún no hay calificaciones
- Departamento de Matem Aticas: Algebra LinealDocumento1 páginaDepartamento de Matem Aticas: Algebra LinealOSCAR PULIDOAún no hay calificaciones
- Modelo de Parcial Algebra UBA XXI 2Documento3 páginasModelo de Parcial Algebra UBA XXI 2Martín BustamanteAún no hay calificaciones
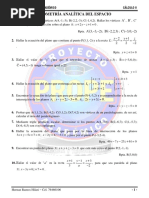
- Geometria Analitica Del EspacioDocumento4 páginasGeometria Analitica Del EspacioDaniel LezcanoAún no hay calificaciones
- PD1 Matemática BásicaDocumento2 páginasPD1 Matemática Básicahuamalianonelson5Aún no hay calificaciones
- Serie VectorialDocumento7 páginasSerie Vectorialdraft 42Aún no hay calificaciones
- Geometría Analítica en 3DDocumento2 páginasGeometría Analítica en 3Dhernando rham100% (1)
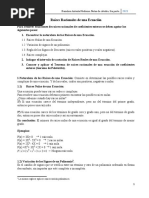
- Raíces Racionales de Una EcuaciónDocumento7 páginasRaíces Racionales de Una EcuaciónMaritza ReyesAún no hay calificaciones
- Vectores Rectas Planos en Certamenes T3Documento3 páginasVectores Rectas Planos en Certamenes T3Caterin MoraAún no hay calificaciones
- Recta en El Espacio - Eduado GagoDocumento22 páginasRecta en El Espacio - Eduado GagoMartin LuqueAún no hay calificaciones
- Geometría Analítica RectasDocumento4 páginasGeometría Analítica RectasAnthony MoranAún no hay calificaciones
- 3.1 Sesión - 9Documento33 páginas3.1 Sesión - 9dennistoribitoAún no hay calificaciones
- Parcial 2 Grupo 2 (Copia)Documento1 páginaParcial 2 Grupo 2 (Copia)María GuarinAún no hay calificaciones
- Taller 2 PDFDocumento5 páginasTaller 2 PDFMiguel CruzAún no hay calificaciones
- Taller Rectas y PlanosDocumento3 páginasTaller Rectas y PlanosMiguel Salazar Di ColloredoAún no hay calificaciones
- Taller Planos y RectasDocumento2 páginasTaller Planos y RectasMatias FuentesAún no hay calificaciones
- Notas de CalculoDocumento22 páginasNotas de CalculoRicardo VillanuevaAún no hay calificaciones
- Ejercicios de Denis ZillDocumento139 páginasEjercicios de Denis ZillMiguel Angel Pozadas20% (5)
- Taller Vectores, Rectas y Planos V2Documento5 páginasTaller Vectores, Rectas y Planos V2Diego7120Aún no hay calificaciones
- UntitledDocumento3 páginasUntitledGabi FrapiAún no hay calificaciones
- Inteligencia Emocional (Goleman) 20pDocumento5 páginasInteligencia Emocional (Goleman) 20pdiatronivAún no hay calificaciones
- Modelo de Parcial Algebra UBA XXI 6Documento3 páginasModelo de Parcial Algebra UBA XXI 6Martín BustamanteAún no hay calificaciones
- DIST. DE PUNTO A RECTA. PARALELISMO - PERPENDICUL - Introducción A La Matemática para La Ingenieria PDFDocumento2 páginasDIST. DE PUNTO A RECTA. PARALELISMO - PERPENDICUL - Introducción A La Matemática para La Ingenieria PDFJair PuicónAún no hay calificaciones
- Taller Vectores, Rectas y Planos PDFDocumento5 páginasTaller Vectores, Rectas y Planos PDFDiego7120Aún no hay calificaciones
- Guía Semana 6-Mat 315-2023 (Geometría Del Espacio) - Con Respuestas-Corr.Documento6 páginasGuía Semana 6-Mat 315-2023 (Geometría Del Espacio) - Con Respuestas-Corr.Melvin QuezadaAún no hay calificaciones
- RectaDocumento4 páginasRectaMelani CorroAún no hay calificaciones
- Evaluaciones Resueltas Cálculo Vectorial 2019A EPNDocumento30 páginasEvaluaciones Resueltas Cálculo Vectorial 2019A EPNKAGGHGAún no hay calificaciones
- 04 - TP4. Recta y Plano 2023Documento6 páginas04 - TP4. Recta y Plano 2023Matemática ParticularAún no hay calificaciones
- Taller 5 Plano Cartesiano PDFDocumento3 páginasTaller 5 Plano Cartesiano PDFXxGran GamerXxAún no hay calificaciones
- 8-Rectas en R3Documento22 páginas8-Rectas en R3Fabrizio ChervazAún no hay calificaciones
- Funciones de Una VariableDocumento15 páginasFunciones de Una VariableJORGE LOPEZAún no hay calificaciones
- Unidad 2 Recta en El Espacio GuiaDocumento6 páginasUnidad 2 Recta en El Espacio GuiaMarlon LeivaAún no hay calificaciones
- Sesión6 - Rectas en El EspacioDocumento15 páginasSesión6 - Rectas en El EspacioAlberto MedinaAún no hay calificaciones
- Enero 2020Documento2 páginasEnero 2020845675 845675Aún no hay calificaciones
- Ce82 2020 0 Semana 1 Sp2 Ejercicios de Recta y Parabola (Respuestas)Documento7 páginasCe82 2020 0 Semana 1 Sp2 Ejercicios de Recta y Parabola (Respuestas)Selthon Luis Ore SalcedoAún no hay calificaciones
- Ce82 2020 0 Semana 1 Sp2 Ejercicios de Recta y Parabola (Respuestas)Documento7 páginasCe82 2020 0 Semana 1 Sp2 Ejercicios de Recta y Parabola (Respuestas)Selthon Luis Ore SalcedoAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
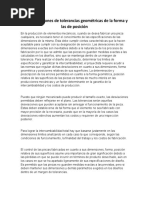
- Representaciones de Tolerancias Geométricas de La Forma y Las de PosiciónDocumento5 páginasRepresentaciones de Tolerancias Geométricas de La Forma y Las de PosiciónJOSELYN CHIPOL SINACAAún no hay calificaciones
- Geometria en El EspacioDocumento14 páginasGeometria en El EspacioLuis CanquizAún no hay calificaciones
- Campos Escalares, Límites y ContinuidadDocumento24 páginasCampos Escalares, Límites y ContinuidadMiguel GonzalezAún no hay calificaciones
- Practica Domiciliaria 2 Fisica 2 PDFDocumento2 páginasPractica Domiciliaria 2 Fisica 2 PDFSherwin Brayan Barboza VasquezAún no hay calificaciones
- HT 03Documento9 páginasHT 03Alexis RetuertoAún no hay calificaciones
- Prisma - CilindroDocumento6 páginasPrisma - CilindroEren gamerAún no hay calificaciones
- Apunte Superficies2 PDFDocumento24 páginasApunte Superficies2 PDFJosé MiguelAún no hay calificaciones
- Apuntes en Proceso Bovedas CilindricasDocumento21 páginasApuntes en Proceso Bovedas CilindricasAlex Mendoza MartinezAún no hay calificaciones
- Tarea 4 Piedrahita DayanaDocumento24 páginasTarea 4 Piedrahita DayanaDayana Isabel Piedrahita López100% (3)
- Semana 15 Cilindro y ConoDocumento5 páginasSemana 15 Cilindro y Conomiguel angeito arcibia mendozaAún no hay calificaciones
- DIapositivas Calculo 222Documento66 páginasDIapositivas Calculo 222Laura Sofia GuerraAún no hay calificaciones
- Temas de Calculo Diferencial en Varias VariablesDocumento135 páginasTemas de Calculo Diferencial en Varias VariablesThiago González100% (1)
- Manual de Dibujo en Ingenieria 2020-2 PDFDocumento248 páginasManual de Dibujo en Ingenieria 2020-2 PDFluis carhuarica romero0% (1)
- Guia-Mat - 2 - (70P) - Ga - VVDocumento70 páginasGuia-Mat - 2 - (70P) - Ga - VVRómulo Lázaro RíosAún no hay calificaciones
- Cap 30 GeometriaDocumento3 páginasCap 30 Geometriaerwin_carryAún no hay calificaciones
- Geometria Del EspacioDocumento10 páginasGeometria Del EspaciooberhAún no hay calificaciones
- Ejercicios Tolerancias Geometricas JLDocumento5 páginasEjercicios Tolerancias Geometricas JLJuan LaraAún no hay calificaciones
- Ley de GaussDocumento10 páginasLey de GaussDíaz Centellas Luis AdriánAún no hay calificaciones
- Optimización Ejercicios 2022Documento23 páginasOptimización Ejercicios 2022jacmen69007298Aún no hay calificaciones
- CilindrosDocumento2 páginasCilindrosalexismeco2Aún no hay calificaciones
- Guia CuadraticasDocumento4 páginasGuia CuadraticasJose Gregorio Flores MachadoAún no hay calificaciones
- Calculo Diferencial e IntegralDocumento5 páginasCalculo Diferencial e IntegralAdrianSanabriaAún no hay calificaciones
- Teorama de PitagorasDocumento14 páginasTeorama de PitagorasAleja ZuzuAún no hay calificaciones
- Dibujo TridimensionalDocumento130 páginasDibujo TridimensionalJuan José Lopez NietoAún no hay calificaciones
- Seminario 11-02-2019Documento3 páginasSeminario 11-02-2019Jhayr EspinozaAún no hay calificaciones
- Solidos de Revolucion - EjerciciosDocumento5 páginasSolidos de Revolucion - EjerciciosJesus Nuñez CuevaAún no hay calificaciones
- Fórmulas de Geofísica AplicadaDocumento11 páginasFórmulas de Geofísica Aplicadafranzales100% (1)
- Conceptos Basicos - Geometria DescriptivaDocumento42 páginasConceptos Basicos - Geometria DescriptivaGabriel Marquez100% (3)
- Puntos Resueltos.Documento3 páginasPuntos Resueltos.Laura CristinaAún no hay calificaciones
- Taller 1Documento7 páginasTaller 1daniel carvajalAún no hay calificaciones