Unidad 3 Aso
Unidad 3 Aso
Descargar como docx, pdf o txt
También podría gustarte
- Tarea - Unidad 3 - Teoremas de Conservación.Documento23 páginasTarea - Unidad 3 - Teoremas de Conservación.Karol Danitza Aguirre Nova50% (2)
- Guia Eleccion MotovibradorDocumento10 páginasGuia Eleccion Motovibradorhugo CHIVI ARGANDOÑAAún no hay calificaciones
- Informe Algoritmos de PlanificacionDocumento4 páginasInforme Algoritmos de PlanificacionNoelia Carolina Paredes ReynosoAún no hay calificaciones
- Algoritmo Turno Rotativo y Algoritmo SRTF - Paul Andrea David PetroDocumento10 páginasAlgoritmo Turno Rotativo y Algoritmo SRTF - Paul Andrea David Petropaula andrea david petroAún no hay calificaciones
- UF0852 - Instalación y actualización de sistemas operativosDe EverandUF0852 - Instalación y actualización de sistemas operativosCalificación: 5 de 5 estrellas5/5 (1)
- S04 - Planficación de CPUDocumento26 páginasS04 - Planficación de CPUXiomara HuingoAún no hay calificaciones
- Planificacion Del ProcesadorDocumento51 páginasPlanificacion Del ProcesadorAaron Hernan Chilin ValleAún no hay calificaciones
- SO Cap5 PreguntasDocumento5 páginasSO Cap5 PreguntasjeAún no hay calificaciones
- Algoritmos de PlanificacionDocumento10 páginasAlgoritmos de PlanificacionRamon Lloret PertusaAún no hay calificaciones
- Unidad 3Documento38 páginasUnidad 3Marcelo Gudiño MendezAún no hay calificaciones
- Planificación Del ProcesadorDocumento6 páginasPlanificación Del ProcesadorTirbelys P. GuerreroAún no hay calificaciones
- Capitulo 6Documento19 páginasCapitulo 6John MorrilloAún no hay calificaciones
- Calendarización de ProcesosDocumento24 páginasCalendarización de ProcesosIsabel AvalosAún no hay calificaciones
- Algoritmo de PlanificacionDocumento10 páginasAlgoritmo de PlanificacionGerard AntonyAún no hay calificaciones
- S04 - s7 Planificacion de ProcesosDocumento37 páginasS04 - s7 Planificacion de Procesosdiaz524owoAún no hay calificaciones
- Selección Del Mejor Algoritmo de Planificación de Procesos.Documento11 páginasSelección Del Mejor Algoritmo de Planificación de Procesos.Edgar Alberto Enríquez OlimánAún no hay calificaciones
- Algoritmos de PlanificaciónDocumento4 páginasAlgoritmos de PlanificaciónSebastian CatañoAún no hay calificaciones
- Actividad #11 Trabajo Autónomo.Documento8 páginasActividad #11 Trabajo Autónomo.Enzo HerreraAún no hay calificaciones
- Programación de Servicios y ProcesosDocumento3 páginasProgramación de Servicios y ProcesosMeryderDleon0% (1)
- Algoritmos de PlanificacionDocumento12 páginasAlgoritmos de PlanificacionHeber Sanchez SanchezAún no hay calificaciones
- Apuntes Arquitectura de Computadoras UnlaDocumento63 páginasApuntes Arquitectura de Computadoras UnlaDexterAún no hay calificaciones
- Tema - Planificación de ProcesosDocumento7 páginasTema - Planificación de ProcesosTelmo EstradaAún no hay calificaciones
- Algoritmos PlanificacionDocumento20 páginasAlgoritmos PlanificacionBeatrizAún no hay calificaciones
- Actividad 5Documento3 páginasActividad 5oscar garayAún no hay calificaciones
- Algoritmos de PlanificaciónDocumento13 páginasAlgoritmos de PlanificaciónJungkook ParkAún no hay calificaciones
- Planificación Del ProcesadorDocumento28 páginasPlanificación Del ProcesadorccoyocAún no hay calificaciones
- Sistemas Operativos MonoprocesadorDocumento12 páginasSistemas Operativos Monoprocesadorbryan.camargoAún no hay calificaciones
- SO - Clase 05. Planificación de ProcesosDocumento4 páginasSO - Clase 05. Planificación de ProcesosÉver Regalado LúeAún no hay calificaciones
- Cap 4 Administración Del Procesador Yosnel JimenezDocumento13 páginasCap 4 Administración Del Procesador Yosnel JimenezYosnel Alberto Jiménez LedesmaAún no hay calificaciones
- S04.s4 - MaterialDocumento27 páginasS04.s4 - MaterialSebastian Soto ArevaloAún no hay calificaciones
- 2.5 y 2.6 - Niveles Objetivos y Criterios de La PlanificaciónDocumento12 páginas2.5 y 2.6 - Niveles Objetivos y Criterios de La PlanificaciónJuan alejandro Valenzuela garciaAún no hay calificaciones
- Algoritmo Round FinalDocumento11 páginasAlgoritmo Round FinalangelllloooooAún no hay calificaciones
- Planificación de ProcesosDocumento37 páginasPlanificación de ProcesosMiguel Angel Parra MuñozAún no hay calificaciones
- Módulo 2 - Lectura 4Documento20 páginasMódulo 2 - Lectura 4lautaritolibertiAún no hay calificaciones
- AlgoritmosDocumento5 páginasAlgoritmosJose Luis Bigorra GarcíaAún no hay calificaciones
- Algoritmos de Planificación de ProcesoDocumento14 páginasAlgoritmos de Planificación de Procesosaul coyAún no hay calificaciones
- FSO - Algoritmos de Planificación - Algoritmo SJF (Shortest Job First)Documento9 páginasFSO - Algoritmos de Planificación - Algoritmo SJF (Shortest Job First)Genova100% (1)
- Trabajo 5 Sistemas OperativosDocumento4 páginasTrabajo 5 Sistemas Operativoseduardo janns martinezAún no hay calificaciones
- Planificacion de Los ProcesosDocumento9 páginasPlanificacion de Los ProcesosKdavid Marichal VeglianteAún no hay calificaciones
- Algoritmo de Planificación 2Documento3 páginasAlgoritmo de Planificación 2willy mendez silvestreAún no hay calificaciones
- 07 - Planificación - RESUMENDocumento4 páginas07 - Planificación - RESUMENandersonAún no hay calificaciones
- Algoritmo de PlanificacionDocumento7 páginasAlgoritmo de PlanificacionPablo Dh OnettoAún no hay calificaciones
- Administracion Del ProcesadorDocumento38 páginasAdministracion Del ProcesadorOmar CarmonaAún no hay calificaciones
- Cuestionario SO - Semana 8Documento6 páginasCuestionario SO - Semana 8PabloAún no hay calificaciones
- Planificación CPU PDFDocumento34 páginasPlanificación CPU PDFRodrigo HigueraAún no hay calificaciones
- Para Recordar SO Gestión de ProcesosDocumento6 páginasPara Recordar SO Gestión de ProcesoscamiloAún no hay calificaciones
- S04.s4 - Material PDFDocumento28 páginasS04.s4 - Material PDFAlbert RomeroAún no hay calificaciones
- Foro Analizar Las Estrategias de Los Algoritmos de Planificación de ProcesosDocumento10 páginasForo Analizar Las Estrategias de Los Algoritmos de Planificación de Procesoslenin villalbaAún no hay calificaciones
- Administracion de Procesos NEWDocumento68 páginasAdministracion de Procesos NEWWilkier RosalesAún no hay calificaciones
- Gestion de ProcesosDocumento4 páginasGestion de Procesosedu2991Aún no hay calificaciones
- So 4Documento8 páginasSo 4Yeray FernandezAún no hay calificaciones
- Unidad 5 y 6 Cpu y Disk SchedulingDocumento9 páginasUnidad 5 y 6 Cpu y Disk SchedulingAbihail BlackStarAún no hay calificaciones
- Algoritmo de Planificación SRTF FINALDocumento5 páginasAlgoritmo de Planificación SRTF FINALKevin Fernando Pachon SolerAún no hay calificaciones
- S.O ActividadDocumento4 páginasS.O ActividadEsteban FernándezAún no hay calificaciones
- Actividad 2-SistemasOperativosDocumento10 páginasActividad 2-SistemasOperativosKimy EmiliaAún no hay calificaciones
- Algoritmode Planificaciónpor PrioridadesDocumento4 páginasAlgoritmode Planificaciónpor PrioridadesMateo BurbanoAún no hay calificaciones
- Niveles, Objetivos y Criterios de PlanificaciónDocumento27 páginasNiveles, Objetivos y Criterios de Planificaciónlelouch4Aún no hay calificaciones
- Sesion 2 Sistemas Operativos AvanzadosDocumento6 páginasSesion 2 Sistemas Operativos Avanzadosshioky coomerAún no hay calificaciones
- Algoritmos de PlanificacionDocumento2 páginasAlgoritmos de PlanificacionLester Josue Garcia ValladaresAún no hay calificaciones
- Administración Del Procesador (Scheduling) - Universidad Católica Andrés BelloDocumento48 páginasAdministración Del Procesador (Scheduling) - Universidad Católica Andrés Bellodarioleonz0% (1)
- Desarrollo de componentes software para servicios de comunicaciones. IFCT0609De EverandDesarrollo de componentes software para servicios de comunicaciones. IFCT0609Aún no hay calificaciones
- Desarrollo y optimización de componentes software para tareas administrativas de sistemas. IFCT0609De EverandDesarrollo y optimización de componentes software para tareas administrativas de sistemas. IFCT0609Aún no hay calificaciones
- Lowenfeld, V. La Etapa Pre-Esquemática de 4 A 7 AñosDocumento14 páginasLowenfeld, V. La Etapa Pre-Esquemática de 4 A 7 AñosFacundo SuarezAún no hay calificaciones
- Unidad 3Documento3 páginasUnidad 3Facundo SuarezAún no hay calificaciones
- FP AsaditoDocumento3 páginasFP AsaditoFacundo SuarezAún no hay calificaciones
- Clase Caso de UsoDocumento17 páginasClase Caso de UsoFacundo SuarezAún no hay calificaciones
- Pre-Informe Maquina Asincrona Vacio y CortoDocumento5 páginasPre-Informe Maquina Asincrona Vacio y CortosandraAún no hay calificaciones
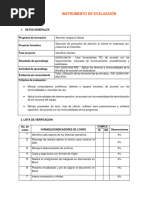
- Ie Ga1 220501046 Aa2 Ev01Documento2 páginasIe Ga1 220501046 Aa2 Ev01cvenus301Aún no hay calificaciones
- Elaboración de Proyecto PastoralDocumento7 páginasElaboración de Proyecto PastoralErick JoelAún no hay calificaciones
- Sennheiser e 914 MicrophoneDocumento8 páginasSennheiser e 914 MicrophoneManuel Herrán GarcíaAún no hay calificaciones
- Solicitud Medica: Zaira Lorena Guevara Muñoz - Registro MedDocumento1 páginaSolicitud Medica: Zaira Lorena Guevara Muñoz - Registro MedNancy Suarez RojasAún no hay calificaciones
- Castillo Tecnologia Almacenes CentrosDocumento17 páginasCastillo Tecnologia Almacenes CentrosNayaret SilvaAún no hay calificaciones
- Incidencia Cultural 1Documento3 páginasIncidencia Cultural 1NobodyAún no hay calificaciones
- PLAN DE CLASE de 11 Ingles ESCUELA LA GRAN COLOMBIADocumento1 páginaPLAN DE CLASE de 11 Ingles ESCUELA LA GRAN COLOMBIAAlcides Salcedo Antequera67% (3)
- Formacion y Modelado de La Superficie TerrestreDocumento14 páginasFormacion y Modelado de La Superficie TerrestrechristianAún no hay calificaciones
- Guia Didactica 1Documento29 páginasGuia Didactica 1gonsanmaAún no hay calificaciones
- Lampara de FotocuradoDocumento12 páginasLampara de FotocuradoThomas Madrid BellioAún no hay calificaciones
- PARQUES NACIONALESpptxDocumento12 páginasPARQUES NACIONALESpptxGerardo Andre Hidalgo WestonAún no hay calificaciones
- Proyecto de TutelaDocumento45 páginasProyecto de TutelaErik MoraAún no hay calificaciones
- Qué Necesitamos Hacer Antes de La SesiónDocumento2 páginasQué Necesitamos Hacer Antes de La SesiónYoRod100% (1)
- Análisis de La Cultura Gastronómica Respecto A La Preparación Del Cuy en El Distrito de Jesús - Cajamarca PDFDocumento104 páginasAnálisis de La Cultura Gastronómica Respecto A La Preparación Del Cuy en El Distrito de Jesús - Cajamarca PDFLuis Martin AlvaradoAún no hay calificaciones
- Lidia Choque ChoqueDocumento2 páginasLidia Choque ChoquePoleras La PazAún no hay calificaciones
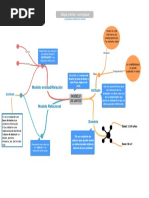
- Mapa Mental-Modelos de DatosDocumento1 páginaMapa Mental-Modelos de Datosjesus manuel contreras florez100% (2)
- Taller2 PDFDocumento6 páginasTaller2 PDFMelanie CespedesAún no hay calificaciones
- Plan de Expansión de Generación y Transmisión Desarrollado Por ETESADocumento5 páginasPlan de Expansión de Generación y Transmisión Desarrollado Por ETESAAugusto GarciaAún no hay calificaciones
- Educación Fisca1Documento53 páginasEducación Fisca1Byron Orlando CastilloAún no hay calificaciones
- Lab 3 - Proteina BrutaDocumento14 páginasLab 3 - Proteina BrutaCourtney QuinnAún no hay calificaciones
- Definición de EstéticaDocumento3 páginasDefinición de EstéticaCARLOS ALBERTO ZEPEDA NU�EZAún no hay calificaciones
- Matemáticas Sin MiedosDocumento6 páginasMatemáticas Sin MiedosHoracio SalvañáAún no hay calificaciones
- Multiplicación AlgebraicaDocumento5 páginasMultiplicación AlgebraicaRoy Marcel Vasquez100% (1)
- Pedro Luis - Lopez ZamudioDocumento4 páginasPedro Luis - Lopez ZamudioZamudio LuisAún no hay calificaciones
- Formato 12 BDocumento6 páginasFormato 12 BfredyAún no hay calificaciones
- El Poder de Los Recuerdos - CentropsimaribelgameDocumento2 páginasEl Poder de Los Recuerdos - CentropsimaribelgameBerta VicenteAún no hay calificaciones
- Ensayos FINALDocumento6 páginasEnsayos FINALandriux rodriguezAún no hay calificaciones