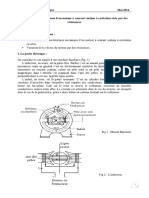
Machine À Courant Éléctrique
Machine À Courant Éléctrique
Télécharger au format docx, pdf ou txt
Vous aimerez peut-être aussi
- Rapport Alternateur TriphaseDocument9 pagesRapport Alternateur TriphaseSami ZakhnoufPas encore d'évaluation
- Exercice BobatoDocument3 pagesExercice BobatoSalma Mk0% (1)
- MCCDocument8 pagesMCCAyoub JoubixPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- TP n03 Moteur A Courant Continu Elm s5!20!21 1Document3 pagesTP n03 Moteur A Courant Continu Elm s5!20!21 1Ondjy Manchiny ValmirPas encore d'évaluation
- Machines SynchronesDocument16 pagesMachines SynchronesAyoub AkoucharPas encore d'évaluation
- 2F.C22 - Machine À Courant ContinuDocument5 pages2F.C22 - Machine À Courant ContinuUmar Muhammet100% (1)
- TP MasDocument16 pagesTP MasMajected92100% (1)
- TP Machine AsynchroneDocument5 pagesTP Machine AsynchroneMohammed Reda GailaPas encore d'évaluation
- TP MSDocument13 pagesTP MSmohammed1salah1heniaPas encore d'évaluation
- HacheurDocument13 pagesHacheurMustapha BeziouiPas encore d'évaluation
- Machine Courant ContinuDocument3 pagesMachine Courant Continu11minutemail100% (1)
- M203 Machine A Courant CountinuDocument76 pagesM203 Machine A Courant Countinuabdelouahed chakraPas encore d'évaluation
- TD2Document2 pagesTD2Shai MaPas encore d'évaluation
- TP Moteur ShuntDocument10 pagesTP Moteur ShuntYoucef SouidiPas encore d'évaluation
- Exercices Sur MCC L3-ElmDocument4 pagesExercices Sur MCC L3-ElmCommande ElmPas encore d'évaluation
- Chapitre 4 MAS G15Document29 pagesChapitre 4 MAS G15Coumba Laobė NdiayePas encore d'évaluation
- Exercices MCCDocument4 pagesExercices MCCEl Idrissi Hajar0% (1)
- TP 1 MCC A Excitation en SerieDocument6 pagesTP 1 MCC A Excitation en SerieBessem Bhiri67% (3)
- Seriemcc 1Document2 pagesSeriemcc 1lazraqy100% (1)
- Simulation Des Machines À Courant Continu Dans L PDFDocument10 pagesSimulation Des Machines À Courant Continu Dans L PDFKa AissaPas encore d'évaluation
- MCCDocument4 pagesMCChouss110% (1)
- TP 6 Accrochage Alternateur Triphase ReseauDocument7 pagesTP 6 Accrochage Alternateur Triphase ReseauAmiir AmirPas encore d'évaluation
- TD1 Electrotechnique Moteur À Courant ContinuDocument2 pagesTD1 Electrotechnique Moteur À Courant ContinuAyoub El Badri100% (1)
- La Machine AsynchroneDocument12 pagesLa Machine AsynchroneLamine Ahmed100% (1)
- AlternateurDocument3 pagesAlternateurRachid Bba100% (2)
- Chapitre 2-1 :MCCDocument4 pagesChapitre 2-1 :MCCjob100% (1)
- TP N°2 Commande D'un Moteur À Courant Continu Par Un Redresseur Monophasé Commandé Double Alternance - PD2Document4 pagesTP N°2 Commande D'un Moteur À Courant Continu Par Un Redresseur Monophasé Commandé Double Alternance - PD2marPas encore d'évaluation
- Compte Rendu TP2 - Machine À Courant ContinuDocument9 pagesCompte Rendu TP2 - Machine À Courant ContinuAbderrahim HamdadPas encore d'évaluation
- TD MCCDocument2 pagesTD MCCGbah KONEPas encore d'évaluation
- TP Machines Synchrones 1plus2Document4 pagesTP Machines Synchrones 1plus2omar ballalouPas encore d'évaluation
- Generatrices A Courant ContinuDocument12 pagesGeneratrices A Courant ContinuHajri Mohamed100% (3)
- Commande MCCDocument20 pagesCommande MCCMoez YoussefPas encore d'évaluation
- Cours Machines AsynchronesDocument53 pagesCours Machines Asynchronesminoungou constantPas encore d'évaluation
- TP Machine 2Document6 pagesTP Machine 2abdeslam riahiPas encore d'évaluation
- Machine SynchroneDocument7 pagesMachine Synchronehdjs5Pas encore d'évaluation
- MCC Et TDDocument18 pagesMCC Et TDDame GayePas encore d'évaluation
- Electrotechnique Fondamentale 2Document87 pagesElectrotechnique Fondamentale 2BensalemPas encore d'évaluation
- Exercices Corrigés Moteur Synchrone - Cours TechProDocument4 pagesExercices Corrigés Moteur Synchrone - Cours TechProImane ZahiriPas encore d'évaluation
- TD5 Moteurs A Courant ContinuDocument4 pagesTD5 Moteurs A Courant ContinuHajri MohamedPas encore d'évaluation
- TP Machine 1Document9 pagesTP Machine 1abdeslam riahiPas encore d'évaluation
- TP M1 - Alternateur - Synchrone - Autonome PDFDocument3 pagesTP M1 - Alternateur - Synchrone - Autonome PDFKhī RãPas encore d'évaluation
- Cours AlternateurDocument8 pagesCours AlternateurAhmed KramdiPas encore d'évaluation
- Machines Synchrones Et AsynchronesDocument18 pagesMachines Synchrones Et AsynchronesbenhabriaPas encore d'évaluation
- Cours Machine Synchrone TgettDocument22 pagesCours Machine Synchrone TgettJosef PrincePas encore d'évaluation
- Exo Corrige MCC FsDocument20 pagesExo Corrige MCC FsDama DiawaradamaPas encore d'évaluation
- TD MCC-2020 PDFDocument6 pagesTD MCC-2020 PDFazizPas encore d'évaluation
- TD3 Generatrices A Courant ContinuDocument3 pagesTD3 Generatrices A Courant ContinuHajri MohamedPas encore d'évaluation
- Machine Synchrone Cours TGMDocument6 pagesMachine Synchrone Cours TGMSaid Mamou100% (3)
- Machine Electrique IiDocument3 pagesMachine Electrique IiOncle LinkPas encore d'évaluation
- Chapitre6 MCCDocument11 pagesChapitre6 MCCmaroua belhadjPas encore d'évaluation
- Transformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiqueD'EverandTransformateur À Semi-Conducteurs: Révolutionner le réseau électrique pour la qualité de l'électricité et l'efficacité énergétiquePas encore d'évaluation
- Grille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesD'EverandGrille Intelligente: Échange d'électricité et d'informations entre les maisons et les centrales électriquesPas encore d'évaluation
- L'électricité - Découvreurs et Inventeurs: Tome IID'EverandL'électricité - Découvreurs et Inventeurs: Tome IIÉvaluation : 5 sur 5 étoiles5/5 (1)
- Machine Synchrone PDFDocument10 pagesMachine Synchrone PDFayoumaaoui5100% (12)
- La Machine Asynchrone Monophasée (TP N°3 " Usthb ")Document12 pagesLa Machine Asynchrone Monophasée (TP N°3 " Usthb ")laperouse2008100% (16)
- Rapport AlamiDocument17 pagesRapport AlamiMohamed HilmiPas encore d'évaluation
- TP OnduleurDocument6 pagesTP OnduleurMaman De BaraaPas encore d'évaluation
- Capabilité EnnonceDocument5 pagesCapabilité EnnonceYounesHamoudiPas encore d'évaluation
- Les Grands Courants de Pensé Du Management D'entreprise Et de La GRHDocument10 pagesLes Grands Courants de Pensé Du Management D'entreprise Et de La GRHYounesHamoudiPas encore d'évaluation
- Elements FinisDocument15 pagesElements FinisYounesHamoudiPas encore d'évaluation
- Gestion Du Rayon JardinDocument11 pagesGestion Du Rayon JardinYounesHamoudiPas encore d'évaluation
- Multi Vibrate UrDocument8 pagesMulti Vibrate UrYounesHamoudiPas encore d'évaluation
- Implantation en ChainonsDocument6 pagesImplantation en ChainonsYounesHamoudi100% (1)
- c05b Moteurs AutresDocument34 pagesc05b Moteurs AutresHemza SellamnaPas encore d'évaluation
- dc3 2Document4 pagesdc3 2hatem mradPas encore d'évaluation
- Machines À Courant ContinuDocument25 pagesMachines À Courant Continuchrist MoukoundaPas encore d'évaluation
- Commande Vectorielle Moteur Asynchrone PDFDocument2 pagesCommande Vectorielle Moteur Asynchrone PDFJodyPas encore d'évaluation
- Cours Electrotechnique AvancÉ eDocument42 pagesCours Electrotechnique AvancÉ eAbderrahmane WardiPas encore d'évaluation
- Contribution A L'amelioration de La Robustesse de La Commande D'une Machine Asynchrone A Double AlimentationDocument123 pagesContribution A L'amelioration de La Robustesse de La Commande D'une Machine Asynchrone A Double AlimentationHazrul_Mohamed_Basri100% (1)
- Variateur de VitesseDocument69 pagesVariateur de Vitessezouhir26950% (2)
- Cours Commande VectorielleDocument7 pagesCours Commande VectorielleMohamed BourzaPas encore d'évaluation
- TP #01 - Modélisation Et Simulation de MSAPDocument3 pagesTP #01 - Modélisation Et Simulation de MSAPAklil MPas encore d'évaluation
- Proposition Mastre 2 G Électrique Commande Des Systèmes Electriques 2016 2017Document1 pageProposition Mastre 2 G Électrique Commande Des Systèmes Electriques 2016 2017Latif KebbabiPas encore d'évaluation
- TP 2 PDFDocument4 pagesTP 2 PDFHoussam RekibiPas encore d'évaluation
- Chapitre 3: Machines Asynchrones: 1 Généralités. Mise en Équation 1.1 DéfinitionDocument36 pagesChapitre 3: Machines Asynchrones: 1 Généralités. Mise en Équation 1.1 DéfinitionLina RachaPas encore d'évaluation
- TP3 Variateur de VitesseDocument7 pagesTP3 Variateur de Vitesse22073 22073Pas encore d'évaluation
- Cours - Electricite - Moteur Asynchrone - Terminale StiDocument11 pagesCours - Electricite - Moteur Asynchrone - Terminale StiAissam EssanhajiPas encore d'évaluation
- Moteur Pas A Pas CoursDocument9 pagesMoteur Pas A Pas Coursabou02100% (2)
- Etude Des Machines SynchronesDocument22 pagesEtude Des Machines SynchronesYousra EnnaddamPas encore d'évaluation
- Sans Nom 1Document10 pagesSans Nom 1Main VertePas encore d'évaluation
- Comparatif Machines ElectriquesDocument0 pageComparatif Machines ElectriquesmarwitosPas encore d'évaluation
- TP 6 Machines Electriques 2Document7 pagesTP 6 Machines Electriques 2REZOPas encore d'évaluation
- TP04Document4 pagesTP04جمال ضيفيPas encore d'évaluation
- Research Paper BLDC MotorDocument7 pagesResearch Paper BLDC MotorYesha ShahPas encore d'évaluation
- Thermcross Katalógus-2014-MODocument30 pagesThermcross Katalógus-2014-MOanassPas encore d'évaluation
- 16 Variation VitesseDocument40 pages16 Variation VitessebenjarrayPas encore d'évaluation
- Machines Electriques Tournantes - Document ElèvesDocument73 pagesMachines Electriques Tournantes - Document ElèvesBerLin Dz100% (1)
- dc3 1Document5 pagesdc3 1hatem mradPas encore d'évaluation
- Définition (Enregistré Automatiquement)Document19 pagesDéfinition (Enregistré Automatiquement)ALAPas encore d'évaluation
- Série de TD2 CME M1 Mach Elec 2020Document2 pagesSérie de TD2 CME M1 Mach Elec 2020fatima bentoumiPas encore d'évaluation
- Notice de Montage Equipement de Motorisation Servo Moteur de ...Document12 pagesNotice de Montage Equipement de Motorisation Servo Moteur de ...Cédric RONJONPas encore d'évaluation
- tp3 LoucifDocument13 pagestp3 LoucifMustapha EL Amine GHERDAINEPas encore d'évaluation