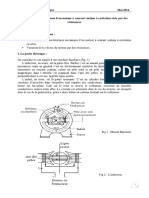
Cours Alternateur
Cours Alternateur
Télécharger au format doc, pdf ou txt
Vous aimerez peut-être aussi
- Cours AlternateurDocument8 pagesCours AlternateurAsm Ma100% (11)
- Chap7 - Protection de Distance MiCOM P444Document41 pagesChap7 - Protection de Distance MiCOM P444Salvador Fayssal100% (2)
- TP N 1 Pompes Et CompresseursDocument17 pagesTP N 1 Pompes Et CompresseursNasro DjePas encore d'évaluation
- Correction: V CC VDocument6 pagesCorrection: V CC Vzakariae ben-akka100% (1)
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabD'EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabPas encore d'évaluation
- Cours Sur Les Machines Synchrones Triphasés - Vesion3 - 2Document26 pagesCours Sur Les Machines Synchrones Triphasés - Vesion3 - 2Mohamed Berrached100% (1)
- Machine Synchrone PDFDocument10 pagesMachine Synchrone PDFAyoub AL FaidyPas encore d'évaluation
- Cours AlternateurDocument8 pagesCours AlternateurFatma Borgi Ep Saadaoui100% (1)
- Cours AlternateurDocument7 pagesCours Alternateuranyos_05100% (2)
- Machines SynchronesDocument16 pagesMachines SynchronesAyoub AkoucharPas encore d'évaluation
- Production Et Distribution de L'énergie ÉlectriqueDocument59 pagesProduction Et Distribution de L'énergie ÉlectriquemaronnamPas encore d'évaluation
- Machine SynchroneDocument9 pagesMachine SynchroneMohamed TdPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- Generatrices A Courant ContinuDocument12 pagesGeneratrices A Courant ContinuHajri Mohamed100% (3)
- Moteur Asynchrone TriphaséDocument61 pagesMoteur Asynchrone TriphaséJulesPas encore d'évaluation
- TP2:Diagramme de Potier D'un Alternateur: Réaliser Par: Hassine Abir / Attig Houda Classe & Filiére & GroupeDocument2 pagesTP2:Diagramme de Potier D'un Alternateur: Réaliser Par: Hassine Abir / Attig Houda Classe & Filiére & GroupeSarra SdiriPas encore d'évaluation
- Calcul Des Machines ElectriquesDocument14 pagesCalcul Des Machines Electriquesfayssal22Pas encore d'évaluation
- Machine Synchrone: Pôles LissesDocument13 pagesMachine Synchrone: Pôles LissesBelkacem Nadir100% (1)
- TP 1 MCC A Excitation en SerieDocument6 pagesTP 1 MCC A Excitation en SerieBessem Bhiri67% (3)
- Amelioration Du Facteur de Puissance DDocument10 pagesAmelioration Du Facteur de Puissance DIr Djolinha Kinamvuidi100% (2)
- Principe de Fonctionnement Du TélérupteurDocument14 pagesPrincipe de Fonctionnement Du Télérupteurhoussineadam100% (2)
- Machine À Courant ÉléctriqueDocument21 pagesMachine À Courant ÉléctriqueYounesHamoudi100% (1)
- TP5 Etude de La Génératrice À Excitation ShuntDocument3 pagesTP5 Etude de La Génératrice À Excitation Shuntthieke100% (1)
- Machines Electriques: La Machine À Courant ContinuDocument118 pagesMachines Electriques: La Machine À Courant ContinuAbdesslem Jarray100% (4)
- Sujet Corrige-Moteur Asynchrone PDFDocument3 pagesSujet Corrige-Moteur Asynchrone PDFAmine Lôrênzo100% (1)
- Câblage Dahlander, Le Schéma en Détail.Document4 pagesCâblage Dahlander, Le Schéma en Détail.allaabdellahPas encore d'évaluation
- Rhéostat de DémarrageDocument2 pagesRhéostat de DémarrageAsm Ma75% (4)
- Correction SerieDocument6 pagesCorrection SerieSidahmed LarbaouiPas encore d'évaluation
- Cour CIRCUIT MAGNETIQUEDocument8 pagesCour CIRCUIT MAGNETIQUERahal karim100% (2)
- ALTERNATEURSDocument8 pagesALTERNATEURSamos carlos guei100% (2)
- Chapitre 4 Moteur Courant Continu PDFDocument7 pagesChapitre 4 Moteur Courant Continu PDFKouki Nizar50% (2)
- Chapitre 3 Moteur À Courant ContinuDocument14 pagesChapitre 3 Moteur À Courant ContinuFatima Zahra Amalou100% (1)
- Exercices Moteur Asynchrone PDFDocument22 pagesExercices Moteur Asynchrone PDFalaeddinePas encore d'évaluation
- TD Machines Électriques 2-Partie 4Document4 pagesTD Machines Électriques 2-Partie 4Maha BadriPas encore d'évaluation
- Chapitre 2 GeneratriceDocument26 pagesChapitre 2 Generatricehachimou roufaiPas encore d'évaluation
- Le Transformateur Triphasé PDFDocument15 pagesLe Transformateur Triphasé PDFmarwa tayari100% (1)
- Chapitre 3 MCCDocument76 pagesChapitre 3 MCCDl OramPas encore d'évaluation
- Courant Alternatif Monophasé-Cours 2003Document13 pagesCourant Alternatif Monophasé-Cours 2003Babacar Tounkara100% (2)
- Chapitre 4 - Les Transformateurs Nouveau 1Document25 pagesChapitre 4 - Les Transformateurs Nouveau 1Oudjoud KeddourPas encore d'évaluation
- Exos Machine SynchroneDocument14 pagesExos Machine SynchroneIkram Ikram100% (3)
- Machine AsynchroneDocument5 pagesMachine AsynchronemidoPas encore d'évaluation
- L'Électricité - Découvreurs et Inventeurs: Tome IVD'EverandL'Électricité - Découvreurs et Inventeurs: Tome IVÉvaluation : 3 sur 5 étoiles3/5 (2)
- Électrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsD'EverandÉlectrotechnique | Pas à Pas: Bases, composants & circuits expliqués pour les débutantsÉvaluation : 5 sur 5 étoiles5/5 (1)
- L'électricité - Découvreurs et Inventeurs: Tome IID'EverandL'électricité - Découvreurs et Inventeurs: Tome IIÉvaluation : 5 sur 5 étoiles5/5 (1)
- L'énergie solaire: Survit facilement grâce à l'énergie solaire hors réseauD'EverandL'énergie solaire: Survit facilement grâce à l'énergie solaire hors réseauPas encore d'évaluation
- Chapitre 4Document8 pagesChapitre 4ali hadjiPas encore d'évaluation
- Cours AlternateurDocument9 pagesCours Alternateurmouhawilya44100% (1)
- Cours AlternateurDocument8 pagesCours AlternateurAhmed KramdiPas encore d'évaluation
- Cours ALT 2010 - New1Document8 pagesCours ALT 2010 - New1Assane FallPas encore d'évaluation
- Machine AsynchroneDocument7 pagesMachine AsynchroneFatma Borgi Ep SaadaouiPas encore d'évaluation
- Machines Synchrones Cours - SDocument12 pagesMachines Synchrones Cours - Simane grounjarPas encore d'évaluation
- Fonction Convertir Machines Synchrones Triphases CoursDocument5 pagesFonction Convertir Machines Synchrones Triphases CoursdddddPas encore d'évaluation
- Machines SynchronesDocument4 pagesMachines SynchronesTarak BenslimanePas encore d'évaluation
- Cours Sur Les Machines Synchrones Triphases - Pour ER - Vesion1Document20 pagesCours Sur Les Machines Synchrones Triphases - Pour ER - Vesion1amoskemagnonPas encore d'évaluation
- Chapitre 02 Machines SynchronesDocument20 pagesChapitre 02 Machines Synchronesvally kashalaPas encore d'évaluation
- 08 Moteur SynchDocument6 pages08 Moteur Synchmathis.morinPas encore d'évaluation
- Moteur ContinueDocument3 pagesMoteur ContinueToumana MnyssirPas encore d'évaluation
- Covertir1p PDFDocument5 pagesCovertir1p PDFpqnamwPas encore d'évaluation
- TD P9: ARQS Magnétique, Induction: Rappels Sur L'inductionDocument6 pagesTD P9: ARQS Magnétique, Induction: Rappels Sur L'inductionnicolas.jcmlPas encore d'évaluation
- Programme JSFST2024 - RevuDocument4 pagesProgramme JSFST2024 - RevuamirddinebPas encore d'évaluation
- Acide OrthophosphoriqueDocument15 pagesAcide Orthophosphoriqueraoudha ben mbarekPas encore d'évaluation
- Tableau Garanties Neoliane VitaliteDocument8 pagesTableau Garanties Neoliane VitaliteLaudrien NzilaPas encore d'évaluation
- Corps Présents Ou Absents ? Sur Le Statut Du Corps Dans La Psychanalyse en Ligne - F. Y. Garcia Valenzuela - En-Je N° 39Document11 pagesCorps Présents Ou Absents ? Sur Le Statut Du Corps Dans La Psychanalyse en Ligne - F. Y. Garcia Valenzuela - En-Je N° 39Fabián Yesid García ValenzuelaPas encore d'évaluation
- Bourgoin 0723NDocument58 pagesBourgoin 0723NbimpjbPas encore d'évaluation
- Bac S SVT 2019 Amérique Du Sud - Partie 2.2 SpécialitéDocument3 pagesBac S SVT 2019 Amérique Du Sud - Partie 2.2 Spécialitégzqg9cp7mtPas encore d'évaluation
- Chapitre III Corps Gras-3Document13 pagesChapitre III Corps Gras-3kokinal897Pas encore d'évaluation
- Ange Selon Le Jour de NaissanceDocument7 pagesAnge Selon Le Jour de Naissancenathanmulohwe50Pas encore d'évaluation
- Liste Produits À ControlerDocument1 pageListe Produits À ControlerLmambopoukayahoo.fr Loïc MamboPas encore d'évaluation
- Composition Du 1er Trimestre Communication Ecrite 4ème 2021-2022 Cpeg Agbozo MegbedjiDocument1 pageComposition Du 1er Trimestre Communication Ecrite 4ème 2021-2022 Cpeg Agbozo MegbedjiValdes Marco BAWAPas encore d'évaluation
- Compteur CoulterDocument5 pagesCompteur CoulterKhadidja Nora KIBBOUAPas encore d'évaluation
- Laser Et Orthodontie Clinique de Franck PourratDocument3 pagesLaser Et Orthodontie Clinique de Franck Pourratjean JacquesPas encore d'évaluation
- Chapitre3 Chimie Des EauxDocument24 pagesChapitre3 Chimie Des EauxAnime StagePas encore d'évaluation
- WWT A3 FRDocument2 pagesWWT A3 FRAndra SimonaPas encore d'évaluation
- TP 6Document5 pagesTP 6Tamanegi uzumakiPas encore d'évaluation
- Réticulum Endoplasmique OranDocument7 pagesRéticulum Endoplasmique OranHaitam El OuahabiPas encore d'évaluation
- Effet Du PH Des Lacs Sur Le Succes Reproducteur Du Canard ColvertDocument2 pagesEffet Du PH Des Lacs Sur Le Succes Reproducteur Du Canard ColvertMouad El OuahabiPas encore d'évaluation
- Num - PHPDocument116 pagesNum - PHPsalamPas encore d'évaluation
- La Réglementation PrudentielleDocument24 pagesLa Réglementation Prudentielleoussama el100% (2)
- Magie Du SangDocument17 pagesMagie Du SanggregorygadauPas encore d'évaluation
- Ribosomes PDFDocument5 pagesRibosomes PDFbokkunPas encore d'évaluation
- SMIA, S2, Optique Géométrique, Cours, Chap3et4Document24 pagesSMIA, S2, Optique Géométrique, Cours, Chap3et4aymano jamaloPas encore d'évaluation
- Poly Exo PSDocument12 pagesPoly Exo PShhedfiPas encore d'évaluation
- Cours Cycle de L - EauDocument34 pagesCours Cycle de L - EauPFE100% (1)
- Mali - Code Travail - Arrete ApplicationDocument11 pagesMali - Code Travail - Arrete Applicationtafisco5505Pas encore d'évaluation
- Les Sols Du Tadla Et Leur Repartition Schematique Au 1/5oo Ooo"Document37 pagesLes Sols Du Tadla Et Leur Repartition Schematique Au 1/5oo Ooo"Younes LbsPas encore d'évaluation
- Droit Civil LECON 3 Cours - Les Régimes Spéciaux de Responsabilité : L'ex Des Produits DéfectueuxDocument7 pagesDroit Civil LECON 3 Cours - Les Régimes Spéciaux de Responsabilité : L'ex Des Produits DéfectueuxOceane RivoirePas encore d'évaluation
- Fiche Technique Sauna - Ind01Document4 pagesFiche Technique Sauna - Ind01Jan OlivierPas encore d'évaluation