Synthese Grafcet Selon EN 60848
Synthese Grafcet Selon EN 60848
Transféré par
Paul DayangDroits d'auteur :
Formats disponibles
Synthese Grafcet Selon EN 60848
Synthese Grafcet Selon EN 60848
Transféré par
Paul DayangTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Droits d'auteur :
Formats disponibles
Synthese Grafcet Selon EN 60848
Synthese Grafcet Selon EN 60848
Transféré par
Paul DayangDroits d'auteur :
Formats disponibles
OUTIL GRAFCET
UTILISATION DU LOGICIEL AUTOMGEN
INTRODUCTION
Le contenu du présent document a été défini lors de la réunion du 7 novembre 2003. Il a pour but de:
- fixer les notations de l'outil GRAFCET à utiliser pour la rédaction des sujets de bac et des futurs dossiers
techniques de systèmes ;
- définir les limites d'utilisation du logiciel AUTOMGEN lors de l’épreuve du baccalauréat.
Ce document est à prendre en considération pour la rédaction des sujets de bac 2005. Il est
néanmoins souhaitable qu'il soit utilisé pour la formation des élèves de première dès cette année.
Etaient présents à cette réunion :
Gérald Carton
Jean-François Compagnon
Lionel Comtet
Laurent Lecuyer
François Moine
Yves Renaud
Jean-Luc Rose
Gilles Vienot
Rédaction du document :
Laurent Lecuyer
Yves Renaud
Lecture et contrôle du document :
Alain Abry
Jean-François Compagnon
François Moine
Jean-Luc Rose
Pour la partie graphisme et règles d'évolutions de l'outil GRAFCET, le support de référence est la norme
NF EN 60848 de AOUT 2002 (Indice de classement C 03-190).
Les notations des GRAFCET du point de vue PC ainsi que les schémas pneumatiques devront être conformes à la
norme NF ISO 1219-2 de juin 1998 (indice de classement E 04-057). Les repères des matériels pneumatiques
devront être fournis à l'élève.
Bibliographie:
NF EN 60848 de AOUT 2002.
NF ISO 1219-2 de juin 1998
LIVRE «le GRAFCET » S MORENO & E PEULOT (Educalivre)
LIVRE «le GEMMA » S MORENO & E PEULOT (Educalivre)
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 1/23
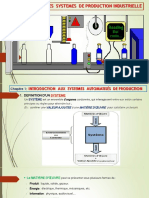
1. Structure d’un système automatisé de production (SAP)
ordres
PARTIE COMMANDE PARTIE
PARTIE COMMANDE PARTIE
(PC) OPERATIVE
(PC) OPERATIVE
(PO)
(PO)
informations
informations ordres
PARTIE
PARTIE
RELATION
RELATION
(PR)
(PR)
Il est constitué de trois parties :
La Partie Opérative (PO) qui opère sur la matière d’œuvre et le produit. Elle regroupe :
- les effecteurs : dispositifs terminaux qui agissent directement sur la matière d’œuvre pour lui donner sa
valeur ajoutée (outils de coupe, pompes, têtes de soudure, etc.) ;
- les actionneurs : éléments chargés de convertir l’énergie afin de l’adapter au besoin de la partie
opérative ; cette énergie étant ensuite consommée par les effecteurs (moteur, vérin, électroaimant,
résistance de chauffage, etc.) ;
- les préactionneurs : éléments chargés :
- d'adapter le faible niveau énergétique disponible en sortie de la P.C. au besoin de la P.O ;
- de distribuer ou de moduler l’énergie délivrée aux actionneurs (contacteur, distributeur, variateur de
vitesse,…).
- les capteurs qui assument l’ensemble des fonctions de la chaîne d’acquisition de données (fin de course
de vérin, détecteur de position, capteur de température, etc.)
La Partie Relation (PR) qui comporte le pupitre de dialogue homme-machine équipé des organes de
commande permettant la mise en/hors énergie de l’installation, la sélection des modes de marche, la commande
manuelle des actionneurs, la mise en référence, le départ des cycles, l’arrêt d’urgence… ainsi que des
signalisations diverses telles que voyants lumineux, afficheurs, écrans vidéo, Klaxons, sonneries, etc.
La Partie Commande (PC) regroupe les composants (relais électromagnétique, opérateur logique, etc.) et les
constituants (API, cartes à microprocesseur, micro-ordinateurs, etc.) destinés au traitement des
informations émises par les organes de commande de la PR et capteurs de la PO.
Les ordres résultants sont transmis aux préactionneurs de la PO et aux composants de signalisation de la PR afin
d’indiquer à l’opérateur l’état et la situation du système
La dimension «point de vue» caractérise la situation de l’observateur décrivant le Système
automatisé.
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 2/23
2. Notion de point de vue
PARTIE COMMANDE PARTIE
PARTIE COMMANDE PARTIE
(PC) OPERATIVE
(PC) OPERATIVE
(PO)
(PO)
Point de
vue
Point de Point de vue
SYSTEME PO-PR
vue
PC
PARTIE
PARTIE
RELATION
RELATION
(PR)
(PR)
2.1. SAP Point de
vue
système (procédé et processus)
Description faite par un observateur se situant d'un point de vue externe au SAP.
Le point de vue système décrit le comportement du système vis à vis du produit.
Le procédé est l’ensemble des fonctions successives exécutées sur un même produit au cours de sa
fabrication.
Le processus est l’organisation du procédé. C’est la succession des fonctions simultanées réalisées sur
tous les produits présents dans le système automatisé.
Le GRAFCET du point de vue système permet le dialogue entre le client et le concepteur pour la
spécification du système automatisé.
2.2. Point de vue partie opérative
Description du comportement du système faite par un observateur se situant d'un point de vue interne au SAP
et externe à la PC. Les choix technologiques de la PO sont effectués.
Le point de vue partie opérative décrit les actions produites par les actionneurs à partir des informations
acquises par les capteurs.
Le GRAFCET du point de vue partie opérative permet le dialogue entre le concepteur de la partie opérative et
le concepteur de la partie commande.
La notation, à ce niveau peut être littérale (ex : fermeture de la porte) ou symbolique en utilisant les repères
du dossier technique.
2.3. Point de vue partie commande
Description du comportement du système par un observateur se situant d'un point de vue interne à la PC
Ce GRAFCET prend en compte les choix technologiques et l’ensemble des échanges PC PO et PC
Opérateur. Il décrit dans un premier temps la marche normale et peut évoluer en fonction des modes de
marches et d’arrêts imposés par le cahier des charges du système automatisé.
C’est le GRAFCET du point de vue du réalisateur de la Partie Commande
La notation retenue à ce niveau est la notation symbolique utilisant les repères du dossier technique.
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 3/23
3. Le modèle GRAFCET
L'AFCET (Association Française pour la Cybernétique Economique et Technique) et l'ADEPA (Agence nationale
pour le DEveloppement de la Production Automatisée) ont mis au point et développé une représentation
graphique qui traduit, sans ambiguïté, l'évolution du cycle d'un automatisme séquentiel.
Ce diagramme fonctionnel: le GRAFCET (Graphe Fonctionnel de Commande, Etapes Transitions) permet de
décrire les comportements attendus de l'automatisme en imposant une démarche rigoureuse, évitant ainsi les
incohérences dans le fonctionnement.
3.1. Définitions
Le modèle est défini par un ensemble constitué :
- d’éléments graphiques de base comprenant : les étapes, les transitions, les liaisons orientées.
- d’une interprétation traduisant le comportement de la partie commande vis-à-vis de ses entrées et de ses
sorties, et caractérisée par les réceptivités associées aux transitions et les actions associées aux étapes.
- de 5 règles d’évolution définissant formellement le comportement dynamique de la partie commande.
- d’hypothèses sur les durées relatives aux évolutions.
3.2. Eléments graphiques de base
Etape initiale
0
Action
Transition
1 Percer Récéptivité
associée à
Liaison Fin de perçage la transistion
2 Déplacer
Etape: une étape représente une situation stable de la PC
Une étape est soit active soit inactive. On peut associer à chaque étape i une variable Xi image
de son activité.
ex: Etape 2 active X2 = 1 Etape 2 inactive X2 = 0
Etape initiale: étape active au début du fonctionnement. Elle se représente par un double carré.
Liaisons Elles relient les étapes aux transitions et les transitions aux étapes. Le sens général d’évolution
orientées: est du haut vers le bas. Dans le cas contraire, des flèches doivent être employées
Transitions : une transition indique une possibilité d'évolution d’activité entre deux ou plusieurs étapes.
Cette évolution s'accomplit par le franchissement de la transition.
Réceptivité : La réceptivité associée à une transition est une fonction logique :
- des entrées (capteurs, commande opérateur)
- des activités des étapes (Ex : X1 pour étape 1 active.)
- des variables auxiliaires (Ex : [C1=10] pour un test sur compteur C1)
Action: L'action indique, dans un rectangle, comment agir sur la variable de sortie, soit par assignation
(action continue), soit par affectation (action mémorisée)
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 4/23
4. Règles d’évolution
Règle 1 : Situation initiale
La situation initiale est la situation à l'instant initial, elle est donc décrite par l'ensemble des étapes
actives à cet instant.
Règles 2 : Franchissement d’une transition
Une transition est validée lorsque toutes les étapes, immédiatement précédentes reliées à cette
transition, sont actives. Le franchissement d'une transition se produit :
- lorsque la transition est VALIDÉE ;
- ET QUE la réceptivité associée à cette transition est VRAIE.
Règles 3 : Evolution des étapes actives
Le franchissement d’une transition provoque simultanément :
- L’activation de toutes les étapes immédiatement suivantes.
- La désactivation de toutes les étapes immédiatement précédentes.
Règle 4 : Evolutions simultanées
Plusieurs transitions simultanément franchissables sont simultanément franchies.
Règle 5 : Activation et désactivation simultanée d’une même étape
Si au cours d’une évolution, une même étape se trouve être à la fois activée et désactivée, elle reste
active.
5. Règle de syntaxe
L’alternance étape-transition et transition-étape doit toujours être respectée quelle que soit la séquence
parcourue.
6. Les réceptivités
6.1. Les réceptivités associées aux transitions
Une proposition logique, appelée réceptivité, qui peut être vraie ou fausse est associée à chaque transition.
Description d’une réceptivité par une expression
Description d’une réceptivité par un texte
booléenne
1 1
Porte fermée et
présence pièce a.(b+c)
2 2
6.2. Réceptivité toujours vraie
La notation 1 (1 souligné) indique que la réceptivité est toujours vraie.
1
Dans ce cas, l’évolution est dite toujours fugace (voir § 12), le
1 franchissement de la transition n’est conditionné que par l’activité
de l’étape amont
2
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 5/23
6.3. Front montant et descendant d’une variable logique
Front montant Front descendant
La notation indique que la réceptivité n’est vraie que La notation indique que la réceptivité n’est vraie que
lorsque la variable passe de la valeur 0 à la valeur 1. lorsque la variable passe de la valeur 1 à la valeur 0.
1 1 1
a a+ b (a.b)
2 2 2
La réceptivité n’est vraie La réceptivité n’est vraie
que lorsque a passe de que lorsque a est vraie ou La réceptivité n’est vraie que lorsque le produit logique
l’état 0 à l’état 1 que b passe de l’état 0 à « a.b » passe l’état 1 à l’état 0
l’état 1
6.4. Réceptivité dépendante du temps
La notation est de la forme
1 a
« t1/variable/t2 ». Dans l’exemple ci-contre,
la réceptivité n'est vraie que 3 s après que Réceptivité vraie
3s/a/7s « a » passe de l’état 0 à l’état 1, elle ne Réceptivité fausse
redevient fausse que 7 s après que « a » 3s 7s
2 passe de l’état 1 à l’état 0.
Simplification usuelle
L’utilisation la plus courante est la temporisation de la variable d’étape avec un temps t2 égal à
zéro :
1 X1 Dans ce cas la durée d’activité de l’étape 1 est de 5 s.
5s/X1 Remarque : Il est possible d’utiliser cette notation lorsque
X2 l’étape temporisée n’est pas l’étape amont de la transition.
2 5s
6.5. Valeur booléenne d’un prédicat
Un prédicat est une expression contenant une ou plusieurs variables et qui est susceptible de devenir une
proposition vraie ou fausse.
Exemple 1 Exemple 2 Exemple 3
1 1 1
[C1=4] [Température [t>10°C].h
supérieure à 40°C]
2 2 2
La réceptivité est vraie lorsque la La réceptivité est vraie lorsque la
Le langage littéral peut être utilisé.
valeur courante du compteur est température est supérieure à 10°C
égale à 4. et le niveau haut h est atteint.
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 6/23
7. Les actions associées
Une ou plusieurs actions élémentaires ou complexes peuvent être associées à une étape. Les actions
traduisent ce qui doit être fait chaque fois que l’étape à laquelle elles sont associées est active. Il
existe 2 types d’actions :
- les actions continues.
- Les actions mémorisées.
7.1. Action continue
L’exécution de l’action se poursuit tant que l’étape à laquelle elle est associée est active et que la condition
d’assignation (expression logique de variables d’entrées et/ou de variables internes) est vérifiée. En l’absence de
condition l’action s’effectue tant que l’étape à laquelle elle est associée est active.
X1
1 Action A
b X2
Action A
7.1.1. Action avec condition d’assignation (action conditionnelle)
Une proposition logique, appelée condition d'assignation, qui peut être vraie ou fausse,
conditionne l’action continue. La condition d'assignation ne doit jamais comporter de front de variables
d’entrées et/ou de variables internes.
c
1 Action A X1
b X2
Action A
7.1.2. Action avec condition d’assignation dépendante du temps
La condition d’assignation n’est vraie que 5 secondes après que « c » passe de l’état 0 à l’état 1 (front montant
de c) ; elle ne redevient fausse que 3 secondes après que « c » passe de l’état 1 à l’état 0 (front descendant de
c).
5s/c/3s
X1
1 Action A
X2
b c
5s
Action A
3s
7.1.3. Action retardée
L'action retardée est une action continue dont la condition d'assignation n'est vraie qu'après une durée t1
spécifiée depuis l'activation de l’étape associée. Dans l’exemple ci-dessous, l’action A sera exécutée 5s après
l’activation de l’étape 1.
5s/X1
X1
1 Action A
b X2
5s
Action A
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 7/23
7.1.4. Action limitée dans le temps
L'action limitée dans le temps est une action continue dont la condition d'assignation n'est vraie que
pendant une durée t1 spécifiée depuis l'activation de l’étape à laquelle elle est associée.
Représentation équivalente
5s/X1
X1
1 Action A 1 Action A
5s/X1
b Action A
2
5s
7.2. Action maintenue ou mémorisée
Pour qu'une action reste maintenue lorsque l'étape qui l'a commandée vient d'être désactivée, il faut utiliser
une action mémorisée.
En mode mémorisé c’est l’association d’une action à des événements internes qui permet d’indiquer qu’une
variable de sortie prend et garde la valeur imposée si l’un des événements se produit.
7.2.1. Action à l’activation et à la désactivation
Une action à l’activation est une action mémorisée Une action à la désactivation est une action
lors de l’activation de l’étape liée à cette action. mémorisée lors de la désactivation de l’étape liée à
cette action.
10 C:=0
10 C:=C+1
Incrémentation du compteur C à l’activation de l’étape Mise à 0 du compteur C à la désactivation de l’étape
10 10.
10 KM1:=1
KM1=1 dès l’activation de l'étape 10 et reste à 1 jusqu'à l’activation de
l’étape 16.
16 KM1:=0
7.2.2. Action sur événement
Une action sur évènement est une action mémorisée conditionnée à l’apparition d’un événement, l’étape à
laquelle l’action est reliée étant active. Il est impératif que l’expression logique associée à l’évènement
comporte un ou plusieurs fronts de variables d’entrées.
a X10
Incrémentation du compteur C sur le
front montant de « a », l’étape 10 a
10 C:=C+1
étant active. Valeur
courante de C 0 1 2
7.2.3. Action au franchissement
La notion d'action au franchissement de la norme EN 60848 n'est pas reprise dans ce document.
8. Commentaires
Un commentaire relatif aux éléments graphiques d’un GRAFCET peut être
placé entre guillemets. 10 "étape d'attente"
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 8/23
9. Les structures de base
9.1. Séquence linéaire
Une séquence linéaire est composée d’une suite d’étapes qui peuvent être activées les unes après les autres.
9.2. Sélection de séquence
Une sélection de séquence est un choix d’évolution entre plusieurs séquences à partir d’une ou plusieurs
étapes. Elle se représente graphiquement par autant de transitions validées en même temps qu’il peut y avoir
d’évolution possibles. L’exclusion entre les séquences n’est pas structurelle. Pour l’obtenir, il faut s’assurer soit
de l’incompatibilité mécanique ou temporelle des réceptivités, soit de leur exclusion logique.
Exclusivité logique Exclusivité technologique Exclusivité avec priorité
3 3 3
a.b a.b 1S1.d 1S2.d
a a.b
4 5
4 5 4 5
Les réceptivités /a.b et a.b sont Les réceptivités 1S1.d et 1S2.d sont Les réceptivités a et /a.b sont
logiquement exclusives. technologiquement exclusives par exclusives avec priorité à l’évolution
les capteurs fins de course 1S1 et 34 sur l’évolution 35 si a=1 et
1S2 du vérin 1A. b=1.
9.3. Saut d’étapes et reprise de séquence
Saut d’étapes Reprise de séquence
Le saut d’étapes permet de sauter une ou plusieurs étapes La reprise de séquence permet de recommencer
lorsque les actions associées à ces étapes deviennent plusieurs fois la même séquence tant qu’une
inutiles. condition n’est pas obtenue.
10 10
c.e c.e d
11 11
a a
12 c.e 12
b c.e
13 13
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 9/23
9.4. Séquences simultanées (séquences parallèles)
Si le franchissement d’une transition conduit à activer plusieurs étapes en même temps, ces étapes
déclencheront des séquences dont les évolutions seront à la fois simultanées et indépendantes.
Si l'étape 29 est active, la réceptivité « e »
provoque, lorsqu'elle est vraie, l'activation
29 ACTION B simultanée des étapes 30 et 40.
Les deux séquences évoluent alors indépendamment
e l’une de l’autre.
Les étapes 32 et 41 sont des étapes d'attente; dès
30 ACTION A 40 ACTION D qu’elles sont actives, la transition 32,4133 est
franchie ( 1 : réceptivité toujours vraie) ce qui
d b entraîne simultanément, l’activation de l’étape 33 et
la désactivation des étapes 32 et 41.
31 ACTION C 41 On remarque :
- que l’activation de l’étape 32 permet d'éviter que
a l'action C se poursuive lorsque a est vraie et que b ne
l'est pas encore.
- que l’activation de l’étape 41 permet d'éviter que
32 l'action D se poursuive lorsque b est vraie et que a ne
l'est pas encore.
1
33 ACTION F
10. Les structures particulières
10.1. Etape et transition source
Etape source Transition source
Une étape source est une étape qui ne possède aucune Une transition source et une transition qui ne
transition amont. Dans l’exemple ci-dessous, l’étape source possède aucune étape amont. Par convention, la
initiale 1 n’est active qu’à l’initialisation (et tant que la transition source et toujours validée et est franchie
réceptivité c.e n’est pas vraie) dès que sa réceptivité est vraie. Dans l’exemple ci-
dessous, l’étape 10 est activée dès que la réceptivité
10 « c.d »est vraie.
c.d
c.e
10
11
b
a
12 11
b a
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 10/23
10.2. Etape et transition puits
Etape puits Transition puits
Une étape puits est une étape qui ne possède aucune Une transition puits et une transition qui ne possède
transition aval ; sa désactivation est possible par un ordre aucune étape aval. Dans l’exemple ci-dessous,
de forçage d’un GRAFCET de niveau supérieur (voir § 13) lorsque la transition puits est validée et que « c.d »
est vraie, le franchissement de cette transition a pour
unique conséquence de désactiver l’étape 11.
10
10
d
b
11
11
a
c.f
c.e 12
c.e
13
11. Remarques sur les liaisons orientées
11.1. Liaison orientée de bas en haut
Par convention le sens d’évolution est toujours de bas en haut. Des flèches doivent être utilisées si cette
convention n’est pas respectée ou si leur présence peut apporter une meilleure compréhension.
Solution conseillée Solution à éviter
1 1
15
15
11.2. Repère de liaison
Lorsqu’une liaison orientée doit être interrompue, (dans des dessins complexes ou dans le cas
de représentation sur plusieurs pages), le repère de l’étape de destination ainsi que le repère de 28
la page à laquelle elle apparaît doivent être indiqués.
Ci-contre, évolution vers l’étape 29 de la page 2.
Etape 29
page 2
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 11/23
11.3. Cas de la sélection de séquence
Solution conseillée Solution à éviter
3 3
4 5 6 4 5 6
12. Evolution fugace
Dans certains cas, l’application des règles d’évolution peut conduire à franchir successivement des transitions si
les réceptivités associées aux transitions postérieures sont déjà vraies lors du franchissement de la ou des
premières transitions considérées. L’évolution correspondante est dite fugace.
Les étapes intermédiaires correspondantes, dites étapes instables , ne sont pas activées, mais on consi dère
qu’elle ont été « virtuellement » activées et désactivées le long du chemin d’évolution intuitive,
et de même que les transitions correspondantes ont été « virtuellement » franchies.
Exemple d’évolution fugace
Situation antérieure : étape 11 active, a=0, b=1 et c=0
11 11 Interprétation intuitive de l’évolution :
Le changement de valeur de « a » provoque le franchissement de la transition
(1) et l’activation virtuelle de l’étape 12, la transition (2) est ensuite
(1) a (1) a virtuellement franchie, car b=1, pour aboutir à la situation postérieure : étape
13 active.
12 12
Interprétation vraie de l’évolution :
(2) b (2) b Le changement de valeur de « a » conduit directement à la situation
postérieure : étape 13 active.
13 13
(3) c (3) c
12.1. Conséquence d’une évolution fugace sur les assignations
Exemple d’action continue associée à une étape instable
11 11 Situation antérieure : étape 11 active, a=0, b=1 et c=0
(1) a (1) a Le changement de valeur de « a » conduit directement à la situation
postérieure : étape 13 active.
12 KM1 12 KM1 La situation antérieure (étape 11 active) et la situation postérieure
(étape 13 active) assignent la valeur 0 à la variable de sortie KM1.
(2) b (2) b L’étape instable 12 n’étant pas réellement activée, l’assignation à la
valeur 1 de KM1 n’est pas effective au cours de cette évolution fugace.
13 13
(3) c (3) c
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 12/23
12.2. Conséquence d’une évolution fugace sur les affectations
Exemple d’action mémorisée associée à l’activation
d’une étape instable
11 11
Situation antérieure : étape 11 active, a=0, b=1 et c=0
(1) a (1) a Le changement de valeur de « a » conduit directement à la
situation postérieure : étape 13 active.
12 KM1:=1 12 KM1:=1 L’affectation de la valeur 1 à la variable de sortie KM1 est
effective car elle est la conséquence de l’activation virtuelle de
(2) b (2) b l’étape 12.
13 13
(3) c (3) c
13. Structuration par forçage d’un GRAFCET partiel
L’ordre de forçage de situation émis par un GRAFCET hiérarchiquement supérieur permet de modifier la
situation courante d’un GRAFCET hiérarchiquement inférieur, sans qu’il y ait franchissement de transition.
L’ordre de forçage est un ordre interne prioritaire sur toutes les conditions d’évolution et a pour effet d’activer
la ou les étapes correspondant à la situation forcée et de désactiver les autres étapes du GRAFCET forcé.
L’ordre de forçage est représenté dans un double rectangle associé à l’étape pour le différencier d’une action.
Lorsque l’étape 2 est active, le GRAFCET nommé GPN est forcé dans la situation
2 GPN{10} caractérisée par l’activité de l’étape 10 (l’étape 10 est activée et les autres étapes
sont désactivées).
Lorsque l’étape 20 est active, le GRAFCET nommé GC est forcé dans la situation
20 GC{30,35} caractérisée par l’activité des étapes 30 et 35 (les étapes 30 et 35 sont activées et
les autres étapes sont désactivées).
Lorsque l’étape 25 est active, le GRAFCET nommé GPN est forcé dans la situation
25 GPN{*} où il se trouve à l’instant du forçage.
On appelle également cet ordre « figeage ».
Lorsque l’étape 22 est active, le GRAFCET nommé GPN est forcé dans la situation
22 GPN{ } vide. Dans ce cas aucune de ses étapes n’est active.
Lorsque l’étape 34 est active, le GRAFCET nommé G4 est forcé dans la situation
34 G4{INIT} dans laquelle seules les étapes initiales sont actives.
14. Structuration par encapsulation
Cette nouvelle notion de la norme n'est pas reprise dans ce document.
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 13/23
15. Structuration par macro-étapes
Avec la notion de macro-représentation, on se donne le moyen de reporter à plus tard ou sur une autre page la
description détaillée de certaines sé quences.
La macro-étape est la représentation unique d’un ensemble d’étapes et de transitions nommé
M2 expansion de macro-étape.
Exemple d’une macro étape M2 représentée avec son expansion :
L’expansion de la macro-étape commence par une
seule étape d’entrée et se termine par une seule étape de
E2
sortie, étapes qui représentent les seuls liens possibles
avec le GRAFCET auquel elle appartient.
d
(1) a Le franchissement de la transition (1) active l’étape E2.
21 H1
La transition (2) ne sera validée que lorsque l’étape S2
M2 e sera active.
Le franchissement de la transition (2) désactive l’étape S2.
(2) b KM1
22 H1
S2
16. Structuration par GRAFCET de tâches et/ou sous-programme
La norme EN 60848 ne fait pas référence à ces notions et ne définit donc pas de symboles graphiques pour le
GRAFCET de gestion des tâches. Nous pouvons continuer à utiliser la structuration par GRAFCET de sous-
programme(s) en indiquant, entre guillemets (et pas dans un rectangle d’action), le nom du sous-programme
appelé.
GRAFCET PRINCIPAL GRAFCET sous programme SP1
10 20 "entrée"
Sdcy.CI X11+X13
11 "SP1:20-24" 1er appel 21 2V1-14
1ére réponse
X24 2S2
12 1V1-14 22
1S2 2S1
"SP1:20-24" 2 appel
ème
13
2ème réponse
X24
14 1V1-12 24 "sortie"
1S1 X12+ X14
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 14/23
17. Codage des applications avec AUTOMGEN
17.1. Utilisation des symboles
Afin d’améliorer la lisibilité des programmes réalisés sous AUTOMGEN, il est souhaitable d’utiliser des symboles
pour représenter les variables. Nous choisirons plutôt des symboles donnant l'aspect fonctionnel de la variable
représentée.
Exemples : Bouton marche, pompe 1, malaxer, etc.
Il faut néanmoins faire attention à ce que le symbole n'introduise pas d’ambiguïté entre « organe de commande »
et « action ».
Par ailleurs, le tableau suivant doit être présent dans tout sujet d'examen:
AUTOMGEN
Repère Fonction Variable A.P.I.
Symbole Variable
S2 BP « Départ cycle » %I1.0 Départ cycle i0
17.2. Syntaxe des variables
La syntaxe retenue pour les variables est la syntaxe AUTOMGEN (et non la C.E.I.)
17.3. Notation des actions
Le logiciel AUTOMGEN offre la possibilité de noter plusieurs actions dans un
même rectangle d'action en les séparant par une virgule. 1 Avancer,Monter
Cette notation ne devra pas être utilisée lors de la rédaction des
sujets d'examens. .
Néanmoins, si un candidat l'utilise, il ne devra pas être pénalisé.
17.4. Utilisation des langages littéraux
Les langages littéraux, quels qu'ils soient, ne seront pas traités au niveau des sujets d'examens. L’élève
n'aura ni à analyser, ni à utiliser ces langages littéraux. Si dans un programme d'examen fourni avec le sujet, il
existe une partie utilisant un langage littéral, celle ci devra être réalisée sur un folio séparé ou explicitée.
17.5. Fichiers de configuration
Les fichiers de configuration ont pour fonction de faire le liens entre les variables logicielles et les adresses
physiques liées à l’automate. Ces fichiers de configuration sont assez complexes à manipuler. L'èléve ne devra
pas avoir à intervenir sur ces fichiers lors de l'examen, néanmoins ceçi peut être fait en formation afin de
faire le lien entre l'aspect matériel et l'aspect logiciel.
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 15/23
18. Exemple : tunnel de séchage de pièces
Vue de face
TUNNEL DE SECHAGE
Détecteur
Lampes infrarouge
Pièce à S3 Détecteur
sécher
Butée S4
Vérin
Plan incliné
Convoyeur
M
3
Poste
d'évacuation
Vue de dessus Vérin
1S1 Détecteur
Pièce à
sécher 1S2 Détecteur
Plan incliné
S3 Convoyeur S4
Poste
d'évacuation
18.1. Fonctionnement
La pièce à sécher, déposée par l'opérateur sur la plan incliné, descend par gravité au poste de chargement.
Les opérations suivantes sont alors possibles :
- appui sur le B.P Sdcy chargement de la pièce sur le tapis roulant (sortie de la tige du vérin)
- pièce dans le tunnel convoyage en avant et lampes infrarouge en service
- capteur S4 sollicité convoyage en arrière et résistance de chauffage en service
- pièce hors du tunnel convoyage en arrière et arrêt du chauffage
- capteur S3 sollicité évacuation de la pièce sèche par gravité et arrêt.
Remarques:
- Le convoyage est beaucoup plus long que le passage dans l'étuve.
- Il est plus économique de redémarrer l'étuve à chaque demande de séchage que d'alimenter en permanence
les lampes à infrarouge !
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 16/23
18.2. GRAFCET du point du vue système
GRAFCET du point de vue procédé GRAFCET du point de vue processus
ce qu'il faut faire ! comment le faire !
0
0
autorisation de fonctionnement
autorisation de fonctionnement
Charger la pièce
à sécher sur le
Charger la pièce 1 convoyeur
1 à sécher sur le
convoyeur Pièce sur le convoyeur
Pièce sur le convoyeur
Convoyer la pièce
2 vers l'étuve
Convoyer la pièce
2 vers l'étuve Pièce dans l'étuve
Pièce dans l'étuve
Convoyer la pièce
3 dans l'étuve 4 Sécher la pièce
Sécher la pièce
3 Pièce à l'extrémité de l'étuve
Pièce sèche Convoyer la pièce
4 vers le poste de
chargement
Convoyer la pièce
4 vers le poste de Pièce hors de l'étuve
chargement
Convoyer la pièce
Pièce évacuée 3 vers le poste de
chargement
Pièce évacuée
Le GRAFCET du point de vue procédé Le GRAFCET du point de vue processus correspond à la
correspond à la vision d’un observateur qui réalité du fonctionnement du système automatisé qui réalise
suivrait le long de la chaîne un seul produit en plusieurs tâches simultanément.
cours de fabrication (GRAFCET descriptif du
fonctionnement exposé au § 18.1)
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 17/23
18.3. GRAFCET du point de vue Partie opérative
Liste des représentations symboliques des entrées/sorties concernées :
La commande « départ cycle » Sdcy est gérée matériellement par la PC mais nécessaire pour élaborer le
GRAFCET du point de vue PO.
les capteurs (internes à la PO) les actionneurs (internes à la PO) :
S3 : pièce sur le convoyeur moteur MAV: « marche avant »
S4 : pièce à l'extrémité de l'étuve moteur MAR : « marche arrière »
1S1 : tige rentrée lampe infrarouge LI : séchage
1S2 : tige sortie 1A+ : sortie tige vérin de chargement
1A - rentrée tige vérin de chargement
Sdcy Sdcy.1S1 Mouvements
des actionneurs
1 1A+
Informations
capteurs MAV
1S2
1S1 2 MAV 1A- MAR
Pièce dans l'étuve
1S2 1A+
3 MAV 4 LI
S3 1A-
S4
S4 LI
4 MAR
Pièce hors de l'étuve
3 MAR
S3
Le GRAFCET du point de vue partie opérative correspond à la vision d’un observateur qui regarderait les
mouvements des actionneurs à partir des informations acquises par les capteurs.
Remarques :
- la structure retenue (séquences simultanées) n'est pas obligatoire ; nous aurions pu utiliser soit des actions
continues avec condition d’assignation soit plusieurs actions liées à une même étape mais cette
représentation nous paraît plus conviviale pour la compréhension du processus !
- l'absence d'étapes d'arrêt (attente) n'est pas gênante car, après la convergence en ET, la marche « arrière »
se poursuit. Il est nécessaire d'attendre que le capteur S3 ne soit plus sollicité (front descendant de S3) pour
arrêter le processus car cette réceptivité sera bien vérifiée lorsque la pièce sèche sera tombée au poste
d'évacuation !
- l'absence de capteur à l'entrée de l'étuve nous interdit d'utiliser une représentation symbolique pour les
réceptivités concernées.
- l’utilisation de la notation littérale est possible pour la totalité du GRAFCET.
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 18/23
18.4. GRAFCET du point de vue partie commande
Liste des représentations symboliques des entrées/sorties concernées :
Organes de commande et capteurs Préactionneurs
Sdcy : départ cycle KMAV : Contacteur « marche avant »
Satu : arrêt d'urgence KMAR : Contacteur « marche arrière »
S3 : pièce sur le convoyeur KMS : Contacteur « séchage »
S4 : pièce à l'extrémité de l'étuve 1V1-14 : Distributeur « sortie tige »
1S1 : tige rentrée
1S2: tige sortie KMP0 : Contacteur « mise en énergie PO »
GRAFCET de fonctionnement normal (GFN)
X0 > 10
GRAFCET de Sûreté (GS)
X1.Sdcy.1S1
11 1V1-14
0 GFN{10}
1S2
X10. Satu.KMP0
12 KMAV
1
20s/X12
Satu+KMPO
13 KMAV KMS
S4
10s/X14
14 KMAR KMS
S3
Remarques :
- le parallélisme structural a été remplacé par un cycle linéaire qui remplit la même fonction
- le vérin étant piloté par un distributeur monostable (cf. schéma pneumatique p 22), l'ordre de rentrer la tige
de ce dernier n'a pas été réécrit puisque, si l'ordre précédent (« sortir tige » lié à l'étape 11) n'existe plus, le
tiroir du distributeur revient automatiquement en position de départ et la tige rentre inéluctablement !
- la solution retenue pour mettre en service le chauffage consiste, puisqu'il n'y a pas de capteur à l'entrée du
tunnel, à utiliser des temporisations :
- 20 s = temps nécessaire à la pièce pour entrer dans le tunnel
- 10 s = temps nécessaire à la pièce pour traverser le tunnel
- dès l’initialisation de la PC (ou lors d’un appuie sur le B.P. « arrêt d'urgence » Satu, ou lors de la mise hors
énergie de la PO), le GS qui est hiérarchiquement supérieur au GFN force ce dernier à l'étape 10 de telle sorte
qu'aucun ordre ne puisse être émis par la partie commande ce qui sera nécessairement obtenu puisque les
étapes non écrites dans l'ordre de forçage (11, 12, 13, 14) sont systématiquement désactivées. Après ce
forçage de situation, on s’assure que la situation forcée est bien obtenue (X10=1), que l’arrêt d’urgence est
déverrouillé et que la mise en énergie de la PO est effective pour activer l’étape 1 du GS. L’évolution du GFN
n’est possible que si l’étape 1 du GS est active
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 19/23
18.5. Schéma de puissance et de distribution de l’énergie électrique
L1
L2 3 x 400 V
+ N + PE
L3
KMPO
N Q0
Q1 Q3
Q5 gG
F1
Q4
I> I>
T1 I> I> I>
H1: Système 230 V / 24 V
sous tension 63 VA
(balise)
KMPC KMS
Q2
KMAV KMAR
I>
Alimentation
A.P.I. 230 V
Com 24 V
Alimentation U1 V1 W1
des préactionneurs
M1
3
Moteur convoyeur Lampes à infrarouge
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 20/23
18.6. Schéma de commande : solution pour machine classée non dangereuse (catégorie 1)
PO
PC
ce
n
in
in
n
iè
re
r nt
io
on
io
ns
ns
tp
r è
eu va
ns
ns
up s t e
eu rri
e) s i
te
te
en
(p u m
oy a
te
itr en
te
oy a
so st è
us
us
em
nv he
e
nv he
us
us
ag
so
so
Sy
co arc
co arc
rg
so
so
ch
ha
e
M
PO
is
is
PC
Sé
C
M
M
24 V
Q4 KMP0
I>
Q5
Sapc KMPC KMPO Contacts
1 2 3 4 des sorties
de l' A.P.I.
KMPC
Sortie de
0 sécurité
Smpc KMPC de l'A.P.I.
OS1 P>
Satu
Sapo
Smpo KMPO
KMAR KMAV
Com
H2 KMPC HPC KMPO 0V1-12 HPC KMAV KMAR KMS 1V1-14
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 21/23
Remarque relative à la sortie de sécurité de l’A.P.I.:
Comme tout constituant à base de circuits électroniques, l’automate peut présenter des dysfonctionnements et ne
plus assurer l’exécution normale de son programme. L’origine peut être :
- un défaut mémoire ou défaut processeur ;
- un déclenchement du chien de garde (suite à un temps d’exécution du programme trop long).
- un défaut d’alimentation.
L’automate intègre un dispositif d’auto détection et de diagnostic des défauts associé à la sortie « Sécurité » qui
est:
- à l'état 1 si l'automate est en RUN sans défaut (contact fermé) ;
- à l'état 0 si l'automate est en STOP ou RUN avec présence d'un défaut (contact fermé).
Entrées A.P.I. 1S1, 1S2 : détecteurs inductifs montés sur
le corps du vérin.
0V 24 V 0 1 2 3 4 5 6
S3, S4 : détecteurs photoélectriques de
type reflex.
KMP0
Satu Sdcy 1S1 1S2
S3 S4
18.7. Schéma de puissance pneumatique
1S1 1S2 OZ : Groupe de conditionnement d’air constitué :
1A - d’un filtre (F) à air destiné à éliminer les impuretés
solides et liquides (eau) ;
- d’un manodétendeur, ou régulateur (R) qui permet
d’obtenir une pression stable (réglable et affichée
sur le manomètre) ;
1V2 1V3
- d’un lubrificateur (L) qui assure la lubrification des
distributeurs et des vérins par pulvérisation de
particules d’huile entraînées par l’air comprimé
1V1 (inutile lorsque ces éléments sont équipés de tiroirs
4 2
et tige de piston en céramique)
0V1 : distributeur 3/2 (3 orifices, 2 positions)
1V1-14 monostable à commande électropneumatique
3 1
0S1 : Détecteur de pression ou pressostat qui ferme
son contact si la pression dans le circuit est au-dessus
0V1 2
du seuil de réglage.
F R L 1V1 : distributeur 4/2 (4 orifices, 2 positions)
0V1-12 0S1 monostable à commande électropneumatique.
3 1
1V2 : réducteur de débit réglable avec clapet anti-
retour destiné à régler la vitesse de rentrée de la tige
0Z du vérin.
1V3 : idem 1V2 mais destiné à régler la vitesse de
Les composants sont représentés dans la position de sortie de la tige du vérin.
départ, la pression étant appliquée, conformément au 1 A : Vérin double effet
§4.4.2 de la norme ISO 1219-2.
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 22/23
18.8. Programme AUTOMGEN
18.8.1. Repères, variables et symboles
Variable A.P.I. AUTOMGEN
Repère Fonction TSX17 TSX37 Symbole Variabl
e
Satu BP « Arrêt d’urgence » I0,0 %I1.0 Aturg i0
Sdcy BP « Départ cycle » I0,1 %I1.1 Dep cycle i1
1S1 Détecteur « tige rentrée » I0,2 %I1.2 Tige rentrée i2
1S2 Détecteur « tige sortie » I0,3 %I1.3 Tige sortie i3
S3 Détecteur « présence pièce sur le convoyeur » I0,4 %I1.4 P convoyeur i4
S4 Détecteur « présence pièce à l’extrémité de l’étuve » I0,5 %I1.5 P ext étuve i5
KMPO contact « PO en énergie » I0,6 %I1. energiePO i6
KMAV Contacteur « marche avant » O0,1 %Q2.1 Marche AV o1
KMAR Contacteur « marche arrière » O0,2 %Q2.2 Marche AR o2
KMS Contacteur « séchage » O0,3 %Q2.3 Séchage o3
1V1-14 Pilote du distributeur « sortie tige » O0,4 %Q2.4 Sortie tige o4
- Sortie sécurité A.P.I (*) O0,0 %Q2.0 --- ---
(*) La sortie 0 doit être configurée dans le post-processeur comme sortie de sécurité.
18.8.2. Programme en langage orienté GRAFCET
GFN
10
GS
X1. Dep cycle . Tige rentrée
11 Sortie Tige
0 F10:{10}
Tige sortie
X10. Aturg . energiePO
12 Marche AV
1
20s/X12
Aturg + energiePO
13 Marche AV Séchage
P ext étuve (10s/X14)
14 Marche AR Séchage
P convoyeur
Document de synthèse : outil GRAFCET et utilisation du logiciel AUTOMGEN 23/23
Vous aimerez peut-être aussi
- FACTORY IO TP Station Separation EleveDocument24 pagesFACTORY IO TP Station Separation EleveKartigenPas encore d'évaluation
- Spring Boot par la pratique: Développer les services Rest avec Spring-Boot et Spring-RestTemplateD'EverandSpring Boot par la pratique: Développer les services Rest avec Spring-Boot et Spring-RestTemplatePas encore d'évaluation
- Programmation Assistée Par OrdinateurDocument64 pagesProgrammation Assistée Par OrdinateurMounir FrijaPas encore d'évaluation
- APEF & Contrat de PhaseDocument23 pagesAPEF & Contrat de PhaseMou Hamoudi100% (4)
- Cours 1 Système OrganisationnelDocument21 pagesCours 1 Système OrganisationnelSamah Sam Bouima100% (4)
- Bridging European and N American Rail Safety Assurance Gaps-Examples of Typical Cases of Cross Acceptace in Both Directions BisDocument11 pagesBridging European and N American Rail Safety Assurance Gaps-Examples of Typical Cases of Cross Acceptace in Both Directions BisRubenPas encore d'évaluation
- Synthese Grafcet (YR3)Document23 pagesSynthese Grafcet (YR3)ALIOU DIALLOPas encore d'évaluation
- Grafcet - Les Normes Du Grafcet - Aii GrafcetDocument13 pagesGrafcet - Les Normes Du Grafcet - Aii GrafcetreyysummerPas encore d'évaluation
- Chapitre II Grafcet 1 PDFDocument11 pagesChapitre II Grafcet 1 PDFChakib Titoussa100% (1)
- 000-Rappels Sur Le GRAFCETDocument13 pages000-Rappels Sur Le GRAFCETbadrPas encore d'évaluation
- GRAFCETDocument13 pagesGRAFCETBOULABIZA MedPas encore d'évaluation
- Le GRAFCETDocument13 pagesLe GRAFCETABAHIPas encore d'évaluation
- Grafcet (YR3)Document24 pagesGrafcet (YR3)Aug Nels Mathieu AnvouliPas encore d'évaluation
- Les Systèmes AutomatisésDocument70 pagesLes Systèmes Automatisésl mPas encore d'évaluation
- 02 GrafcetDocument92 pages02 GrafcetLamnister ZononPas encore d'évaluation
- 01 - CHP 1 - Introduction Aux Systèmes Automatisés de Production (3A-MEM 2023)Document20 pages01 - CHP 1 - Introduction Aux Systèmes Automatisés de Production (3A-MEM 2023)Panel NguessanPas encore d'évaluation
- Etudi Automate 2 Cours Automate 1 EtudiantsDocument2 pagesEtudi Automate 2 Cours Automate 1 EtudiantsMaroua SederPas encore d'évaluation
- API GrafcetDocument294 pagesAPI GrafcetKIMFOUA NZAOU Liné sédricPas encore d'évaluation
- 1-Organisation Generale D'un Systeme AutomatiseDocument4 pages1-Organisation Generale D'un Systeme Automatisefidele brouPas encore d'évaluation
- Notes-Cours Automatisme2023Document15 pagesNotes-Cours Automatisme2023Tabka SouheilPas encore d'évaluation
- Automates Programmables IndustrielsDocument39 pagesAutomates Programmables IndustrielscredoPas encore d'évaluation
- Cle - Cde - IPSL - 16 PDFDocument169 pagesCle - Cde - IPSL - 16 PDFBabacarDiago100% (1)
- 1 Analyse Fonctionnelle PDFDocument36 pages1 Analyse Fonctionnelle PDFAbdellatif Khafif100% (1)
- Chapitre 1Document2 pagesChapitre 1Hocine BoukhiarPas encore d'évaluation
- LES AUTOMATES Sturcture TSMFMDocument33 pagesLES AUTOMATES Sturcture TSMFMEl Hasnaoui YsfPas encore d'évaluation
- 8iblp-Cahier de Technologie 1er Sec Couleur PDFDocument99 pages8iblp-Cahier de Technologie 1er Sec Couleur PDFGuy Ygal100% (1)
- 0 Architecture API - Partie 1Document16 pages0 Architecture API - Partie 1Abdo100% (1)
- API Sturcture PDFDocument8 pagesAPI Sturcture PDFDivin MakitaPas encore d'évaluation
- TAFT-analyse Fonctionnelle TechDocument19 pagesTAFT-analyse Fonctionnelle TechMagicusPas encore d'évaluation
- ContinueDocument2 pagesContinueYahya BortalPas encore d'évaluation
- Le Grafcet v2k5 - ProfDocument35 pagesLe Grafcet v2k5 - Profoumou syPas encore d'évaluation
- Automatisme CoursDocument18 pagesAutomatisme CoursTabka SouheilPas encore d'évaluation
- Analyse Fonctionnelle InterneDocument10 pagesAnalyse Fonctionnelle InterneossaymoPas encore d'évaluation
- Cours Grafcet LEMDocument17 pagesCours Grafcet LEMmahmoud bensassiPas encore d'évaluation
- 31 Grafcet PDFDocument15 pages31 Grafcet PDFBrahim MohamedPas encore d'évaluation
- 01-Cours-Chaine FonctionnelleDocument5 pages01-Cours-Chaine FonctionnelleMohamed HendaouiPas encore d'évaluation
- ProjetttDocument66 pagesProjetttWafa Afsa100% (3)
- Projet TTDocument65 pagesProjet TTAtifi ChaimaPas encore d'évaluation
- Le GRAFCET (Cours) PDFDocument163 pagesLe GRAFCET (Cours) PDFanass kaddouriPas encore d'évaluation
- Automatisme Indust (Grafcet - 2° GIM) - 2023Document33 pagesAutomatisme Indust (Grafcet - 2° GIM) - 2023mohamedji666Pas encore d'évaluation
- Rappels Norme GRAFCETDocument13 pagesRappels Norme GRAFCETSamitr14Pas encore d'évaluation
- DOCPROF GrafcetDocument5 pagesDOCPROF GrafcetBob MinkaPas encore d'évaluation
- 02 Grafcet Points de Vue ProfDocument7 pages02 Grafcet Points de Vue ProfPapy ElpololokoPas encore d'évaluation
- Langage ST Sous Unity Pro-Prise en MainDocument47 pagesLangage ST Sous Unity Pro-Prise en MainJean-Paul Cathalan100% (2)
- Analyse Fonctionnelle InterneDocument11 pagesAnalyse Fonctionnelle InterneossaymoPas encore d'évaluation
- 2 - Automatisme - Grafcet - Partie 1Document163 pages2 - Automatisme - Grafcet - Partie 1simo jinPas encore d'évaluation
- CH1 Systemes AutomatisesDocument3 pagesCH1 Systemes AutomatisesAyoub ElPas encore d'évaluation
- Chapitre 1 Architecture APIs 2L AIIDocument12 pagesChapitre 1 Architecture APIs 2L AIIZaineb YakoubPas encore d'évaluation
- Projet POODocument12 pagesProjet POOPALOUKIPas encore d'évaluation
- Pa Ge de Ga Rde Exp Osã©Document35 pagesPa Ge de Ga Rde Exp Osã©mpikablavyPas encore d'évaluation
- Analyse Structurelle D - Un Système AutomatiséDocument11 pagesAnalyse Structurelle D - Un Système AutomatiséAbdeslamPas encore d'évaluation
- AutomatismeDocument2 pagesAutomatismeisraalaya167Pas encore d'évaluation
- GrafcetDocument109 pagesGrafcetbadr hadriPas encore d'évaluation
- Cours Api 09 Nov 2023 - Pour Fusion2Document34 pagesCours Api 09 Nov 2023 - Pour Fusion28illyjeanPas encore d'évaluation
- Le Grafcet 1Document54 pagesLe Grafcet 1angelico josephPas encore d'évaluation
- Transversalecoursfichesynthsevf 150629112327 Lva1 App6892Document34 pagesTransversalecoursfichesynthsevf 150629112327 Lva1 App6892Otman OtoPas encore d'évaluation
- Chapitre 3 Programmation Des Interfaces Et Normes ISODocument16 pagesChapitre 3 Programmation Des Interfaces Et Normes ISOAchref AbidiPas encore d'évaluation
- Introduction Aux GrafcetDocument28 pagesIntroduction Aux GrafcetkimoPas encore d'évaluation
- Estimation du mouvement: Avancées et applications en vision par ordinateurD'EverandEstimation du mouvement: Avancées et applications en vision par ordinateurPas encore d'évaluation
- Suite logicielle: Révolutionner la vision par ordinateur avec la suite logicielle ultimeD'EverandSuite logicielle: Révolutionner la vision par ordinateur avec la suite logicielle ultimePas encore d'évaluation
- Rendu de ligne de balayage: Explorer le réalisme visuel grâce aux techniques de rendu ScanlineD'EverandRendu de ligne de balayage: Explorer le réalisme visuel grâce aux techniques de rendu ScanlinePas encore d'évaluation
- Profil de couleur: Explorer la perception et l'analyse visuelles en vision par ordinateurD'EverandProfil de couleur: Explorer la perception et l'analyse visuelles en vision par ordinateurPas encore d'évaluation
- Prise en Main D'un Tableur - ExcelDocument6 pagesPrise en Main D'un Tableur - ExcelPaul DayangPas encore d'évaluation
- Dotnet FrameworkDocument9 pagesDotnet FrameworkPaul DayangPas encore d'évaluation
- AUTOMATIONDocument20 pagesAUTOMATIONPaul DayangPas encore d'évaluation
- Cours General-TableurDocument10 pagesCours General-TableurPaul DayangPas encore d'évaluation
- Stat Initiation ExcelDocument51 pagesStat Initiation ExcelPaul DayangPas encore d'évaluation
- ExcelDocument4 pagesExcelPaul DayangPas encore d'évaluation
- Table UrsDocument6 pagesTable UrsPaul DayangPas encore d'évaluation
- Ce Mini Guide Affaires Foncières Zone OHADADocument11 pagesCe Mini Guide Affaires Foncières Zone OHADAPaul DayangPas encore d'évaluation
- 12588FIIEDDocument32 pages12588FIIEDPaul DayangPas encore d'évaluation
- Cours Tableur GeneralitesDocument5 pagesCours Tableur GeneralitesPaul DayangPas encore d'évaluation
- Cours Grafcet Sommaire: Les Notions de BaseDocument37 pagesCours Grafcet Sommaire: Les Notions de BasePaul DayangPas encore d'évaluation
- MédicatDocument16 pagesMédicatPaul DayangPas encore d'évaluation
- Probatoire CH-TI Méca - Appliq Harmo.2020Document5 pagesProbatoire CH-TI Méca - Appliq Harmo.2020Paul DayangPas encore d'évaluation
- Les Utilisateurs de Windows 7 AutodataDocument1 pageLes Utilisateurs de Windows 7 AutodataPaul DayangPas encore d'évaluation
- TP NumericsDocument4 pagesTP NumericsOmar OmarioPas encore d'évaluation
- Cours - Programmation Orientée Objet JavaDocument82 pagesCours - Programmation Orientée Objet JavaABDALLAH SOUISSIPas encore d'évaluation
- Comment Faire Pour Déployer Des Applications WebDocument5 pagesComment Faire Pour Déployer Des Applications WebDrago RagdragoniPas encore d'évaluation
- CD 24.06.2016-1 PDFDocument340 pagesCD 24.06.2016-1 PDFEric VeillonPas encore d'évaluation
- Modycorapportscientifique 2005 PDFDocument141 pagesModycorapportscientifique 2005 PDFhalianePas encore d'évaluation
- Cours CoavdisDocument88 pagesCours CoavdisMEKONGO ESSO OSCAR100% (1)
- Retele LINDocument4 pagesRetele LINPaul RaduPas encore d'évaluation
- Open NmsDocument30 pagesOpen Nmsnfplacide100% (3)
- MVA107 N. AssaadDocument5 pagesMVA107 N. Assaadnour1960Pas encore d'évaluation
- CE Internet Prof PDFDocument2 pagesCE Internet Prof PDFSapinette Le Phương HòaPas encore d'évaluation
- RR 3188Document166 pagesRR 3188m木乃伊Pas encore d'évaluation
- TP 2 Physique PDFDocument6 pagesTP 2 Physique PDFfatiPas encore d'évaluation
- Mi06 l2 Se1 Emd2012Document6 pagesMi06 l2 Se1 Emd2012minaPas encore d'évaluation
- SQL SportonsprofDocument8 pagesSQL Sportonsprofmassinissaksel2012Pas encore d'évaluation
- Cours Bigonoff 16F877Document535 pagesCours Bigonoff 16F877forio_23100% (2)
- Script Cisco CallManager ExpressDocument9 pagesScript Cisco CallManager ExpressChristian Trésor KandoPas encore d'évaluation
- 3.15 Les Biostatistiques Appliquées À l'ODFDocument12 pages3.15 Les Biostatistiques Appliquées À l'ODFFeragut FergalushPas encore d'évaluation
- AndroidDocument55 pagesAndroidKassamba KPas encore d'évaluation
- Chap Vi DebugDocument9 pagesChap Vi Debugtsantatiana03Pas encore d'évaluation
- TP 1 C SharpDocument8 pagesTP 1 C SharpAymen BereddadPas encore d'évaluation
- Quelques Conseils de Rédaction de ProcédureDocument4 pagesQuelques Conseils de Rédaction de ProcédurepagregPas encore d'évaluation
- Comment Enregistrer Sous PDFDocument2 pagesComment Enregistrer Sous PDFKathrynPas encore d'évaluation
- Pricing List 22-03-2021Document65 pagesPricing List 22-03-2021eugene8787Pas encore d'évaluation
- Supply Chain Managment La Conduite Du Changement PDFDocument6 pagesSupply Chain Managment La Conduite Du Changement PDFGhita QandarPas encore d'évaluation
- The Return of The Not Totally DeadDocument32 pagesThe Return of The Not Totally Deadjeepee100% (1)
- Histoire Du Groupe MetaplanDocument4 pagesHistoire Du Groupe MetaplanHugomarPas encore d'évaluation
- Sas Macro CalmarDocument3 pagesSas Macro CalmarAnonymous PKVCsGPas encore d'évaluation
- TD OrdonnancementDocument5 pagesTD OrdonnancementImèn JndoubiPas encore d'évaluation