Ce document contient les détails d'un examen final pour un cours de diagnostic des systèmes, y compris des notes préliminaires, des exercices et des questions. L'examen porte sur des sujets tels que les observateurs de Luenberger, les observateurs à entrées inconnues et la génération de résidus par espace de parité statique.
0 évaluation0% ont trouvé ce document utile (0 vote)
164 vues6 pages
Ce document contient les détails d'un examen final pour un cours de diagnostic des systèmes, y compris des notes préliminaires, des exercices et des questions. L'examen porte sur des sujets tels que les observateurs de Luenberger, les observateurs à entrées inconnues et la génération de résidus par espace de parité statique.
Ce document contient les détails d'un examen final pour un cours de diagnostic des systèmes, y compris des notes préliminaires, des exercices et des questions. L'examen porte sur des sujets tels que les observateurs de Luenberger, les observateurs à entrées inconnues et la génération de résidus par espace de parité statique.
Ce document contient les détails d'un examen final pour un cours de diagnostic des systèmes, y compris des notes préliminaires, des exercices et des questions. L'examen porte sur des sujets tels que les observateurs de Luenberger, les observateurs à entrées inconnues et la génération de résidus par espace de parité statique.
Téléchargez comme PDF, TXT ou lisez en ligne sur Scribd
Télécharger au format pdf ou txt
Vous êtes sur la page 1/ 6
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
UNIVERSITÉ DJILLALI LIABES SIDI BEL ABBES
FACULTÉ DE GENIE ELECTRIQUE DEPARTEMENT : AUTOMATIQUE
Examen Final 20 Module : Diagnostic des Systèmes Semestre : 03 20 Groupe : Master 2 en Automatique Date et Durée : 22/01/2019 (10h :30), 01h :30
Note préliminaire : (00.75 pts)
- Tous documents non autorisés et interdite d’utilisés le téléphone portable et effaceur ;
- En cas de doute sur la compréhension de l’énoncé, explicitez ce que vous comprenez et poursuivez l’exercice dans cette logique ; - Sujet d'examen comporte la plupart des questions indépendantes les unes des autres ; - Répondre aux questions directe sans démonstration sauf les questions de cours ; - Réponde seulement sur les grandes étapes de calcul sans démonstration et formule mathématique ; - L’examen et répondre à 40% de cours et 60% de TD ; - Le calcul se fait par trois chiffres après la virgule.
Nom :……….…………………. Prénom :……………..……………. Matricule : ……...…………
Exercice N°01 : (Question de cours) (03.75 pts chaque mot 0.25pts)
Compléter les paragraphes par les mots indiqués sur la liste suivante : Dérivation, Localiser, Aléatoire, Normale, Détecter, Luenberger, Représentation, Plusieurs, informations, Temps, Défaillants, Mathématique, Redondance, Intermittent.
A) Le diagnostic est un système l’aide à la décision qui permet de Détecter et
de Localiser les composantes ou des organes Défaillants d’un système. B) Défaut est défini comme une Dérivation non permise d’au moins une propriété ou un paramètre caractéristique du système par rapport à un comportement Normale ou acceptable. C) Défaut Intermittent est un cas particulier de défaut avec la propriété particulier que le signale revient de façon Aléatoire à sa valeur nominale. D) Redondance matérielle sont principe de base de diagnostic de défaut repose sur la notion de redondance, qui permet de fournir au système Plusieurs informations différentes sur une même variable. E) Le modèle Mathématique d’un système dynamique (son comportement évalue au cours du Temps Défini par sa Représentation d’état. F) Le générateur de résidus, est à base d’un observateur d’état. Est donné par la Représentation d’état de Luenberger.
M. H .CHEBI 1 Exercice N°02 : (Question de cours) (03.00 pts chaque réponse 0.5 pts)
A) Donner les formules mathématiques des relations suivantes :
Formules a) La condition d’observabilité du système ;
b) La représentation d’état d’un
observateur à entrées inconnues (UIO) ;
c) La représentation d’état discrète d’un
système semis d’un défaut ;
d) Equation d’erreur de reconstruction.
B) Choisir la bonne réponse :
a) Le système dynamique est plus rapide que l’observateur de Luenberger: b) Vrai. c) Faux. d) Aucune de ces réponses. e) L’observateur à entrées Inconnues (UIO) avec blocs d’observateurs (DOC, GOS) serre a : a) Détacté de défaut. b) Isolé le défaut. c) Détecté Isolé le défaut.
Exercice N°03 : (Question de cours) (02.00 pts chaque réponse 01.00 pts)
Répond sur les questions suivantes par des schémas bloc et des relations mathématiques :
Donner le schéma bloc d’un observateur Luenberger
Donner le schéma bloc d’un observateur à entrées Inconnues (UIO)
M. H .CHEBI 2 Exercice N°04 : (Génération de résidus par Espace de parité statique) (04.00 pts chaque réponse 2.00 pts)
Si on considère l’équation de sortie discrète suivante :
1) Déterminer la matrice W du vecteur de parité P(k)=W.y(k)?
>> C1=[1 1 1; 3 2 1;0 1 1];
>> C2=[2 0 1;1 1 0; 2 0 2]; >> p1=-C2*(C1^-1) p1 = -5.0000 1.0000 3.0000 2.0000 -1.0000 -1.0000 -8.0000 2.0000 4.0000 p1 = -5 1 3 1 0 0 2 -1 -1 0 1 0 -8 2 4 0 0 1 2) Est-ce-que les deux matrices W et C sont orthogonaux ?
>> p1*w ans =
M. H .CHEBI 3 0 0 0 0 0 0 0 0 0
Exercice N°05 : (Observateur de Luenberger) (04.50 pts)
Soit le système suivant :
1) Quel est le type de ce système (SISO, SIMO, MIMO, ou MISO) ?
Le type de système est SISO (car une entrée et une sortie), la forme canonique et Commandable (0.5pts) 2) Vérifier la stabilité du système ?
Le système est sable (car les pôles à partie réelle négative)
(0.5 pts) 3) Calculer théoriquement la matrice d’observabilité du système ?
(0.5 pts)
4) Vérifier l’observabilité du système. que concluez-vous ?
Le système est observable
Le système est observable (0.5 pts) 5) Calculer la matrice de gain H de l’observateur par placement de pôles, permettant d’assurer une dynamique de l’observateur 5 fois plus grande que celle du système.
1) H : (équation caractéristique)
(1.0 pts) 6) Vérifier que cet observateur de Luenberger est stable ?
Le système est sable (car les pôles à partie réelle négative)
M. H .CHEBI 4 (0.5 pts) 7) Donner le programme de simulation avec l’observateur sous MATLAB ? clear all clc close all % déclaration d'un système A=[0 1;-2 -3]; B=[1;1]; C=[1 0]; % Stabilité du système P=eig(A) % Observabilité Ob = obsv(A,C); % Vérification de l'observabilité unob = length(A)-rank(Ob); % calcule la matrice de gain H de l'observateur H = place(A,B,P*5) (1.0 pts)
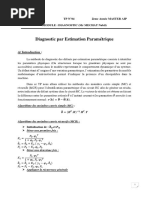
Exercice N°06 : (Observateur à entrées Inconnues (UIO)) (02.00 pts chaque réponse 1.00 pts)
1) Organiser la synthèse d’algorithme de l’observateur UIO (mettre 1, 2….9) ?
Instruction Ordre 1) 02 2) Vérifier la condition d’existence de 01 3) 04 4) 08 5) 09 6) 07 7) 03 8) Vérifier que la paire (A1, C) est observable 05 9) Calculer K1 par placement de pôles 06
2) Réaliser un générateur de résidus à base d’un observateur à entrées inconnues
(UIO) d’après la synthèse précédente (organisé). Soit un système dynamique