TD 2
TD 2
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Rapport SLICDocument11 pagesRapport SLICunfair deathPas encore d'évaluation
- 6-TD InterruptionsDocument4 pages6-TD InterruptionsMassinissa BouarabPas encore d'évaluation
- Serie D'Exercices Systèmes D'Exploitation 2 - L3 InterblocageDocument1 pageSerie D'Exercices Systèmes D'Exploitation 2 - L3 InterblocageYumaPas encore d'évaluation
- Ae 2Document4 pagesAe 2SebriPas encore d'évaluation
- Fiche TD 1 Synchronisation Des ProcessusDocument3 pagesFiche TD 1 Synchronisation Des ProcessusDou Æa100% (1)
- TP3 GestionCPUDocument3 pagesTP3 GestionCPUzakiPas encore d'évaluation
- TD OrdonnancementDocument4 pagesTD OrdonnancementbenfatahPas encore d'évaluation
- Tp2 Les ThreadsDocument3 pagesTp2 Les ThreadsGrille BillePas encore d'évaluation
- SERIE TD SYSTEME TACHES SE2 (2020-2021) VFDocument2 pagesSERIE TD SYSTEME TACHES SE2 (2020-2021) VFmassil12600Pas encore d'évaluation
- Corrigé Examen Archi 2017 - 2018Document3 pagesCorrigé Examen Archi 2017 - 2018Anas MaghrebiPas encore d'évaluation
- SemaphoreDocument4 pagesSemaphoreNihed AttiaPas encore d'évaluation
- TP2 Fragmentation Horizontale Et VerticaleDocument1 pageTP2 Fragmentation Horizontale Et VerticaleSomaya AyouchPas encore d'évaluation
- Chapitre 3Document8 pagesChapitre 3ehj2tj3tv ekztjzjPas encore d'évaluation
- Algorithmique Avancée Et Complexité - Séance 5Document1 pageAlgorithmique Avancée Et Complexité - Séance 5Hicham LoukiliPas encore d'évaluation
- TD N°4 Synchronisation Des Processus: Exercice 1Document4 pagesTD N°4 Synchronisation Des Processus: Exercice 1ifaoui shathaPas encore d'évaluation
- CC de Introdution Systemes Mobiles - CorrigeDocument2 pagesCC de Introdution Systemes Mobiles - CorrigeYandoya DjibiPas encore d'évaluation
- Examen AO Corrig Univ Guelma 2018Document6 pagesExamen AO Corrig Univ Guelma 2018Siaka Dycosh BertePas encore d'évaluation
- Chap2.parallelisme.2014 2015Document9 pagesChap2.parallelisme.2014 2015Massi ZoutatPas encore d'évaluation
- Corrige Examen SE2 2023Document2 pagesCorrige Examen SE2 2023KhadijaPas encore d'évaluation
- Mi06 l2 Se1 Emd2014Document8 pagesMi06 l2 Se1 Emd2014minaPas encore d'évaluation
- SynchronisationDocument21 pagesSynchronisationChaima ZeroualPas encore d'évaluation
- Structures RépétitivesDocument4 pagesStructures RépétitivesFranck N'guessanPas encore d'évaluation
- Corrige Examen 1 ABD07022006Document4 pagesCorrige Examen 1 ABD07022006Hajer BkPas encore d'évaluation
- Sujet TD TP1Document8 pagesSujet TD TP1Merry MPas encore d'évaluation
- Université Sultan Moulay Slimane: Examen Informatique (Compilation)Document2 pagesUniversité Sultan Moulay Slimane: Examen Informatique (Compilation)AMINPas encore d'évaluation
- CMTDDocument11 pagesCMTDNazim AberkanePas encore d'évaluation
- TD IpsDocument82 pagesTD IpsmodoPas encore d'évaluation
- Correction Exercie SEDocument6 pagesCorrection Exercie SEOthmane SerrajPas encore d'évaluation
- UntitledDocument4 pagesUntitledELKESS MOHAMMED AMINEPas encore d'évaluation
- Chap06 1Document98 pagesChap06 1Mike OdjoPas encore d'évaluation
- 1 Contrôle SE1 20-06-2021 Avec CorrigéDocument2 pages1 Contrôle SE1 20-06-2021 Avec CorrigéanasPas encore d'évaluation
- Exa 2Document5 pagesExa 2iheblinko21Pas encore d'évaluation
- Exercice S Dex AmenDocument7 pagesExercice S Dex AmenAli NasserPas encore d'évaluation
- BDW1 TD2 CorrectionsDocument5 pagesBDW1 TD2 CorrectionsGVHNJYPas encore d'évaluation
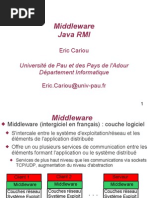
- Cours MiddlewareDocument60 pagesCours MiddlewareLarme D'espoirePas encore d'évaluation
- TD Série 3 Tubes NommésDocument1 pageTD Série 3 Tubes NomméssamaPas encore d'évaluation
- Controle Continu 1 Departement de Génie Informatique Ue Gi 31: Systèmes D'Information Et Genie LogicielDocument2 pagesControle Continu 1 Departement de Génie Informatique Ue Gi 31: Systèmes D'Information Et Genie LogicielFred NjankouoPas encore d'évaluation
- ExamSys2 LMD Epreuve 2013 2014corDocument2 pagesExamSys2 LMD Epreuve 2013 2014corFatima Laiche100% (1)
- Chapitre 02 OfficialDocument66 pagesChapitre 02 Officialsabri rabiePas encore d'évaluation
- Null 5Document15 pagesNull 5arielle stella TSAMOPas encore d'évaluation
- M1idsm Bda Exam1920Document4 pagesM1idsm Bda Exam1920jeannicoPas encore d'évaluation
- 60 Questions Corrigées QCM Génie Logiciel CorrigéDocument4 pages60 Questions Corrigées QCM Génie Logiciel CorrigéAdo BetPas encore d'évaluation
- 1 - Communication Et Synchronisation Entre Processus 2Document42 pages1 - Communication Et Synchronisation Entre Processus 2Wided Touhami100% (1)
- ExamSys1 LMD 2007 2008 EpreuveCorDocument2 pagesExamSys1 LMD 2007 2008 EpreuveCoredoPas encore d'évaluation
- TD SNMP IRS CorrectionDocument5 pagesTD SNMP IRS Correctionnourhene.mendili100% (1)
- Technologies Du Web PDFDocument3 pagesTechnologies Du Web PDFSelma ArabiPas encore d'évaluation
- Chapitre 5-Synchronisation Des ProcessusDocument6 pagesChapitre 5-Synchronisation Des ProcessusIssouf Boubacar100% (1)
- Tuto de Calcul D'adresseDocument25 pagesTuto de Calcul D'adresseN'guessan Maxime KocoboPas encore d'évaluation
- Sujet 2 Modelisation Avancee CorrectionDocument3 pagesSujet 2 Modelisation Avancee CorrectionJULIO STEPHANEPas encore d'évaluation
- TD7 PaginationDocument2 pagesTD7 Paginationrayen boukomPas encore d'évaluation
- EXamen SD - Variante - 1 - 231109 - 073629Document2 pagesEXamen SD - Variante - 1 - 231109 - 073629Djihene Babahenini100% (2)
- TD2 2021-2022Document2 pagesTD2 2021-2022ayoub attiPas encore d'évaluation
- Chapitre 3-1Document22 pagesChapitre 3-1simon ODOHPas encore d'évaluation
- EMD SE 2021 SolutionDocument4 pagesEMD SE 2021 SolutionfatimaPas encore d'évaluation
- Ef Bdda RSD GL 2018 2019Document3 pagesEf Bdda RSD GL 2018 2019sara nardjes khiatPas encore d'évaluation
- TD2 SynchronisationDocument3 pagesTD2 SynchronisationDjamila BekhedidjaPas encore d'évaluation
- TD Transaction PDFDocument2 pagesTD Transaction PDFromuald LanePas encore d'évaluation
- Correction - TD6 - Gestion de La Memoire PDFDocument4 pagesCorrection - TD6 - Gestion de La Memoire PDFAdil Abouelhassan100% (1)
- Serie2_S4_2022Document2 pagesSerie2_S4_2022leonelramsyPas encore d'évaluation
- TP1 - InterruptionsDocument11 pagesTP1 - InterruptionsNesrine BerrahmounePas encore d'évaluation
- TTLL2COMMS3Document1 pageTTLL2COMMS3unfair deathPas encore d'évaluation
- EXAMEN SSI Janvier2020Document1 pageEXAMEN SSI Janvier2020unfair deathPas encore d'évaluation
- Quelque Question Cours OptimisationDocument2 pagesQuelque Question Cours Optimisationunfair deathPas encore d'évaluation
- Loi 18-04Document28 pagesLoi 18-04unfair deathPas encore d'évaluation
- Solu TDDocument6 pagesSolu TDunfair deathPas encore d'évaluation
- Loi 15-04Document9 pagesLoi 15-04unfair deathPas encore d'évaluation
- Technologies Réseaux Examen 2014 - 2015 SOLUTIONDocument6 pagesTechnologies Réseaux Examen 2014 - 2015 SOLUTIONunfair death100% (1)
- Examen 2019-2020 Reseaux Sans Fil SolutionDocument11 pagesExamen 2019-2020 Reseaux Sans Fil Solutionunfair deathPas encore d'évaluation
- TD 1Document2 pagesTD 1unfair deathPas encore d'évaluation
- 3 RTC SignalisationDocument5 pages3 RTC Signalisationunfair deathPas encore d'évaluation
- TP VoipDocument14 pagesTP Voipunfair deathPas encore d'évaluation
- CN-L3 - TD1 - Codage en Ligne GTR 21Document5 pagesCN-L3 - TD1 - Codage en Ligne GTR 21unfair deathPas encore d'évaluation
- TTLL3COMMS5Document1 pageTTLL3COMMS5unfair deathPas encore d'évaluation
- Solution Exo FHSSSDocument1 pageSolution Exo FHSSSunfair deathPas encore d'évaluation
- Examen Téléphonie 2009Document2 pagesExamen Téléphonie 2009unfair death100% (1)
- Examen Téléphonie 2008Document2 pagesExamen Téléphonie 2008unfair death100% (1)
- Corrige Ext Option A 2005Document36 pagesCorrige Ext Option A 2005unfair deathPas encore d'évaluation
- Série D'exercices TD2 Communication Numérique 1Document2 pagesSérie D'exercices TD2 Communication Numérique 1unfair deathPas encore d'évaluation
- TP Signaux Et Systemes TP N°6: Modulation de Fréquence ObjectifDocument8 pagesTP Signaux Et Systemes TP N°6: Modulation de Fréquence Objectifunfair deathPas encore d'évaluation
- Introduction À L'Intelligence Artificielle: 2018 - 2019 Walid AYEDIDocument64 pagesIntroduction À L'Intelligence Artificielle: 2018 - 2019 Walid AYEDIAyedi WalidPas encore d'évaluation
- T RIZDocument4 pagesT RIZouali abirPas encore d'évaluation
- Lecon 1 PapierDocument14 pagesLecon 1 PapierMASSARAM CAMARAPas encore d'évaluation
- Correction Exercice 3 Série Tri 3siDocument2 pagesCorrection Exercice 3 Série Tri 3sims4825014Pas encore d'évaluation
- Chapitre 3 Les Systemes CombinatoiresDocument16 pagesChapitre 3 Les Systemes CombinatoiresOussama EljaafariPas encore d'évaluation
- 3 Algèbre RlationnelleDocument14 pages3 Algèbre RlationnelleBenacer LeilaPas encore d'évaluation
- Livre Blanc Reussir Son Demenagement D Entreprise I2tDocument20 pagesLivre Blanc Reussir Son Demenagement D Entreprise I2tpaulPas encore d'évaluation
- TDReseaux1 PDFDocument5 pagesTDReseaux1 PDFKitanignon Halima DaniogoPas encore d'évaluation
- Memoire 2017 ConstantiniDocument15 pagesMemoire 2017 ConstantinirajaofelixPas encore d'évaluation
- Série n01 - CorrectionDocument5 pagesSérie n01 - CorrectionWafae Ben AbbouPas encore d'évaluation
- Synthese Theories ActionDocument7 pagesSynthese Theories ActionAb SantePas encore d'évaluation
- GSM Sod 2 3 FRDocument2 pagesGSM Sod 2 3 FRrpellegrinemrPas encore d'évaluation
- ArticleCPI Driss BelbachirDocument7 pagesArticleCPI Driss BelbachirAziz TaziPas encore d'évaluation
- Oupes - Permissions 2Document22 pagesOupes - Permissions 2kaiseresisPas encore d'évaluation
- Circuit en Boucle Ouverte - WikipédiaDocument4 pagesCircuit en Boucle Ouverte - WikipédiaDerrick FoakaPas encore d'évaluation
- Performance Rapide - NewDocument13 pagesPerformance Rapide - NewALI JedidiPas encore d'évaluation
- TP No 01 Prise en Main de L'environnement Du Logiciel Proteus ISIS Et de Compilateur MikroC PRO Pour PIC.Document4 pagesTP No 01 Prise en Main de L'environnement Du Logiciel Proteus ISIS Et de Compilateur MikroC PRO Pour PIC.Tamokoue100% (2)
- Modèle Rapport Stage InitiationDocument20 pagesModèle Rapport Stage Initiationmouhib trabelsiPas encore d'évaluation
- Manual Prodipe Clavier Midi1Document18 pagesManual Prodipe Clavier Midi1ValcenyPas encore d'évaluation
- Maint7 V5Document8 pagesMaint7 V5Ashraf FarahPas encore d'évaluation
- Corrige tp2Document2 pagesCorrige tp2victorx95667Pas encore d'évaluation
- Identite Remarquable 2Document1 pageIdentite Remarquable 2N'ganmaPas encore d'évaluation
- Compte Rendu AmpliDocument9 pagesCompte Rendu AmpliSaid LouhaPas encore d'évaluation
- Seq1 Seq2 CorrDocument6 pagesSeq1 Seq2 Corrmutombojonathan03Pas encore d'évaluation
- Android DB - PaperDocument4 pagesAndroid DB - Paperramzi saiidPas encore d'évaluation
- H61M HVSDocument29 pagesH61M HVSThiago SantosPas encore d'évaluation
- Correction TP3Document7 pagesCorrection TP3benhamedsouhailisimmPas encore d'évaluation
- Generals - French - ManualDocument64 pagesGenerals - French - ManualKaïn CoberPas encore d'évaluation
- Yassir Bts Mo9riniDocument11 pagesYassir Bts Mo9riniMR GUNERPas encore d'évaluation
- Analyse Factorielle Des Correspondances-AFCDocument44 pagesAnalyse Factorielle Des Correspondances-AFCAhmed ToujaniPas encore d'évaluation