Cours Systèmes Embarqués - Le Bus CAN
Cours Systèmes Embarqués - Le Bus CAN
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Chapitre 3 Architecture Système AutomobileDocument22 pagesChapitre 3 Architecture Système AutomobileHichem GuedriPas encore d'évaluation
- QCM Langage PythonDocument5 pagesQCM Langage PythonSamira cherifPas encore d'évaluation
- Les CapteursDocument4 pagesLes CapteursMR GHOULPas encore d'évaluation
- SP20 TE 01 19 - S01 - SentrainerDocument6 pagesSP20 TE 01 19 - S01 - SentrainerBatungwanayo EnzoPas encore d'évaluation
- Sommaire Batiprix 2014 Volume 8 PDFDocument1 pageSommaire Batiprix 2014 Volume 8 PDFnarimenePas encore d'évaluation
- Méthodes D'oprtimisation Algorithme Génétiques Exercice Corrigé TSPDocument37 pagesMéthodes D'oprtimisation Algorithme Génétiques Exercice Corrigé TSPGROUPE PFE75% (4)
- 1 BusCAN TrameDocument16 pages1 BusCAN Trameabdousewager100% (1)
- Canbus 2021Document13 pagesCanbus 2021Ayoub ChrifPas encore d'évaluation
- Bus CANDocument9 pagesBus CANato ndongo fabricePas encore d'évaluation
- Cours Bus CANDocument38 pagesCours Bus CANWarpynew C.L.APas encore d'évaluation
- Cours Bus CANDocument30 pagesCours Bus CANnawzat100% (1)
- Bus CanDocument12 pagesBus CanØûssæmã SâmsøümPas encore d'évaluation
- Bus CANDocument8 pagesBus CANAhmed Arrouj100% (2)
- 9296 Tp7com Bus Cansujet PDFDocument2 pages9296 Tp7com Bus Cansujet PDFfatihaPas encore d'évaluation
- TP2 Bus CanDocument12 pagesTP2 Bus Cansamsoum1100% (1)
- LE BUS CAN Cours Prof-1Document6 pagesLE BUS CAN Cours Prof-1Sam .BPas encore d'évaluation
- BV Robo ProfDocument9 pagesBV Robo Profasfirane2013Pas encore d'évaluation
- TP1 Bus CAN-2Document7 pagesTP1 Bus CAN-2samsoum1Pas encore d'évaluation
- Can BUSDocument35 pagesCan BUSgmpsti100% (1)
- TP CanDocument5 pagesTP CanBadr EddinePas encore d'évaluation
- Gestion Des Systemes Electriques Et Electro LP MSAV Sujet 2 - CorrigéDocument6 pagesGestion Des Systemes Electriques Et Electro LP MSAV Sujet 2 - CorrigéBernard MbotchackPas encore d'évaluation
- Cours Bus CANDocument66 pagesCours Bus CANyassinePas encore d'évaluation
- Chapitre 1 MOTOVENTILATEURDocument13 pagesChapitre 1 MOTOVENTILATEURBernard MbotchackPas encore d'évaluation
- Dossier Ressources: Support D'étudeDocument30 pagesDossier Ressources: Support D'étudeImad ElberrouaguiPas encore d'évaluation
- Plan MultiplexageDocument3 pagesPlan MultiplexageTyler TwiixPas encore d'évaluation
- EE MKA2 2023 - ProfDocument34 pagesEE MKA2 2023 - Profmbotchack396Pas encore d'évaluation
- Valdo - FlexrayDocument8 pagesValdo - Flexrayfranckkwabou2Pas encore d'évaluation
- Motor Management 2Document6 pagesMotor Management 2Bernard MbotchackPas encore d'évaluation
- Épreuve GMP 1Document5 pagesÉpreuve GMP 1aimePas encore d'évaluation
- Le Bus CanDocument32 pagesLe Bus CanDragon1700100% (1)
- Chapitre 1 Motoventilateur - CopieDocument42 pagesChapitre 1 Motoventilateur - CopieBernard MbotchackPas encore d'évaluation
- Bus CanDocument52 pagesBus Canyounes100% (1)
- Retroviseur Et Siege Motorises 2023 - EtudiantDocument18 pagesRetroviseur Et Siege Motorises 2023 - EtudiantBernard MbotchackPas encore d'évaluation
- ESP CapteursDocument6 pagesESP CapteursAiche MokhtarPas encore d'évaluation
- TP1 Can Oc2Document9 pagesTP1 Can Oc2samsoum1Pas encore d'évaluation
- Gestion Des Systemes Electriques Et Electro LP MSAV Sujet 3Document6 pagesGestion Des Systemes Electriques Et Electro LP MSAV Sujet 3Bernard MbotchackPas encore d'évaluation
- CC de Technologie Des Vh-VeDocument3 pagesCC de Technologie Des Vh-Vefranckkwabou2Pas encore d'évaluation
- Diag Bus CANDocument5 pagesDiag Bus CANBen MouhandPas encore d'évaluation
- Construction EE 2022 CorrigéDocument11 pagesConstruction EE 2022 CorrigéBernard MbotchackPas encore d'évaluation
- TP Capteurs AutomobilesDocument5 pagesTP Capteurs AutomobilesVida FotsoPas encore d'évaluation
- Identification Des Fils MultiplexesDocument32 pagesIdentification Des Fils MultiplexesMohammed alami100% (1)
- M13 Mise en Œuvre D'un Processus de DiagnosticDocument46 pagesM13 Mise en Œuvre D'un Processus de DiagnosticKc StoriesPas encore d'évaluation
- Maintenance Des Véhicules Automobiles, Seconde-Terminale BEP: Livre de L'élève PDF TéléchargerDocument7 pagesMaintenance Des Véhicules Automobiles, Seconde-Terminale BEP: Livre de L'élève PDF TéléchargerSaint Bezard FrançoisPas encore d'évaluation
- QCM1 Notionsderégulation&d'asservissementDocument1 pageQCM1 Notionsderégulation&d'asservissementMejdi Abassi100% (2)
- Zero Techno Elect P MVT Ipr BitchekiDocument10 pagesZero Techno Elect P MVT Ipr Bitchekikevin nokamPas encore d'évaluation
- Chap 1 Architecture Electrique 1Document10 pagesChap 1 Architecture Electrique 1mbotchack396Pas encore d'évaluation
- FlexrayDocument10 pagesFlexrayFranck Jordan NOZAKAP FOSSIPas encore d'évaluation
- Le Start and Stop 2020Document46 pagesLe Start and Stop 2020quentinhmbtPas encore d'évaluation
- Chapitre 2 Le Bus CANDocument59 pagesChapitre 2 Le Bus CANbrezzy miraPas encore d'évaluation
- Vdocuments Injection-Renault PDFDocument15 pagesVdocuments Injection-Renault PDFibrahim rabbajPas encore d'évaluation
- DiagnostisqueDocument7 pagesDiagnostisqueJoseph Louis NdeyePas encore d'évaluation
- 5 Eobd 1Document14 pages5 Eobd 1LllPas encore d'évaluation
- 6.boite de Vitesse AutoDocument17 pages6.boite de Vitesse AutoDaour NdiayePas encore d'évaluation
- L Architecture MultiplexeDocument6 pagesL Architecture Multiplexeanass sbniPas encore d'évaluation
- Dossier DAE v2Document29 pagesDossier DAE v2Francis Kengne100% (2)
- Flyer Car Train Motronic 2.8 - FRDocument4 pagesFlyer Car Train Motronic 2.8 - FRabdelwahab mahdhi100% (1)
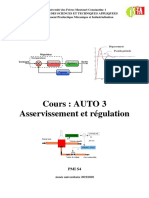
- Cours: AUTO 3 Asservissement Et RégulationDocument83 pagesCours: AUTO 3 Asservissement Et RégulationJure KatumbaPas encore d'évaluation
- MT 1 Textbook StudDocument28 pagesMT 1 Textbook StudAbi MohcinePas encore d'évaluation
- CORRECTION PROPOSE PAR M. SOUOP LT KEKEM TECHNO MECA modifierPCMA 2021Document13 pagesCORRECTION PROPOSE PAR M. SOUOP LT KEKEM TECHNO MECA modifierPCMA 2021elbejoPas encore d'évaluation
- Chapitre - 2 - Le Bus CANDocument59 pagesChapitre - 2 - Le Bus CANsid ali saidjPas encore d'évaluation
- Circuit de Charge AutomobileDocument5 pagesCircuit de Charge AutomobileMohammed sayahPas encore d'évaluation
- Toyota Prius SujetDocument4 pagesToyota Prius SujetDan Cheridan100% (1)
- Le Bus CANDocument17 pagesLe Bus CANInspec TricePas encore d'évaluation
- Cours Systèmes EmbarquésLe Bus CANDocument21 pagesCours Systèmes EmbarquésLe Bus CANMartinezPas encore d'évaluation
- TP 2Document10 pagesTP 2Samira cherifPas encore d'évaluation
- TP 1Document3 pagesTP 1Samira cherifPas encore d'évaluation
- Correction EssaieDocument1 pageCorrection EssaieSamira cherifPas encore d'évaluation
- Instruction TP4Document9 pagesInstruction TP4Samira cherifPas encore d'évaluation
- QcmpythonDocument12 pagesQcmpythonSamira cherifPas encore d'évaluation
- TP 3 AngularDocument6 pagesTP 3 AngularSamira cherifPas encore d'évaluation
- Université Du Québec: Par Arnaud ZinflouDocument162 pagesUniversité Du Québec: Par Arnaud ZinflouSamira cherifPas encore d'évaluation
- Chapitre 1 Systemes Interactifs D Aide A La Decision (Siad)Document61 pagesChapitre 1 Systemes Interactifs D Aide A La Decision (Siad)Samira cherifPas encore d'évaluation
- OSM 1 BoukhobzaDocument54 pagesOSM 1 BoukhobzaSamira cherifPas encore d'évaluation
- Chap14 SolutionsDocument4 pagesChap14 SolutionsSamira cherifPas encore d'évaluation
- Introduction À LembarquéDocument82 pagesIntroduction À LembarquéSamira cherifPas encore d'évaluation
- CoursDocument26 pagesCoursSamira cherifPas encore d'évaluation
- DDB 06 2004Document2 pagesDDB 06 2004Samira cherifPas encore d'évaluation
- Chap3 SETDocument8 pagesChap3 SETSamira cherifPas encore d'évaluation
- Coursinformatique Id3264Document44 pagesCoursinformatique Id3264Samira cherifPas encore d'évaluation
- Chap1 SETDocument5 pagesChap1 SETSamira cherifPas encore d'évaluation
- TP Cisco Packet TracerDocument11 pagesTP Cisco Packet TracerSamira cherifPas encore d'évaluation
- HeuristiqueDocument17 pagesHeuristiqueSamira cherif100% (1)
- CoursDocument190 pagesCoursSamira cherifPas encore d'évaluation
- Composants Électroniques, Reconnaître Les Composants - Diodes Et LED PDFDocument5 pagesComposants Électroniques, Reconnaître Les Composants - Diodes Et LED PDFkader djiblirouPas encore d'évaluation
- Fiche Groupe Lourd N 1Document2 pagesFiche Groupe Lourd N 1Othmane El HouariPas encore d'évaluation
- Me Ecobati Fermacell Etancheite H2o FRDocument6 pagesMe Ecobati Fermacell Etancheite H2o FRtheoPas encore d'évaluation
- LEROYMERLIN Cuisine IngeniousDocument14 pagesLEROYMERLIN Cuisine IngeniousDiana Roxana CiobanuPas encore d'évaluation
- Eap 2023Document6 pagesEap 2023ياسين ابن أبو بكرPas encore d'évaluation
- DEVIS triPLEX MR BertrandDocument5 pagesDEVIS triPLEX MR BertrandMariane TchadeuPas encore d'évaluation
- PAP 2021 Technologies de La CommunicationDocument163 pagesPAP 2021 Technologies de La CommunicationZeineb HajjiPas encore d'évaluation
- Initiation Au Froid Commercial RegulationDocument9 pagesInitiation Au Froid Commercial RegulationThierry roland UmPas encore d'évaluation
- React Native-2-22Document21 pagesReact Native-2-22lamiakarimPas encore d'évaluation
- QCM Emf S4Document4 pagesQCM Emf S4Madiha EcoPas encore d'évaluation
- Rapport de StageDocument43 pagesRapport de Stagesihamarbaz14Pas encore d'évaluation
- L'énergie Cinétique Et L'énergie PotentielleDocument6 pagesL'énergie Cinétique Et L'énergie PotentielleBelkaid Moh YassinouPas encore d'évaluation
- TD1 Découvert Power QueryDocument22 pagesTD1 Découvert Power QuerythluffyPas encore d'évaluation
- Selection Table Stick Electrodes FRDocument1 pageSelection Table Stick Electrodes FRLUC BALOMOCK BIIGA100% (1)
- 06 C03 Modele Relationnel ApprofondissementDocument4 pages06 C03 Modele Relationnel ApprofondissementgaetandescellesPas encore d'évaluation
- TP2 TurboDocument5 pagesTP2 TurboJAMILA CIPas encore d'évaluation
- Thermch 3Document40 pagesThermch 3Fa TehPas encore d'évaluation
- ValPar All Makes Catalogue June 2020 FRDocument124 pagesValPar All Makes Catalogue June 2020 FRMathieu Foisy100% (2)
- Performances Stylistiques Des ApprenantsDocument29 pagesPerformances Stylistiques Des Apprenantselongo22Pas encore d'évaluation
- La Renovation Globale CatalogueDocument14 pagesLa Renovation Globale Cataloguefrancois.glowinskiPas encore d'évaluation
- Processus de MARKOVDocument47 pagesProcessus de MARKOVjacquesPas encore d'évaluation
- MGP7112 - Cours 6 - Pensée Design & RisquesDocument37 pagesMGP7112 - Cours 6 - Pensée Design & RisquesDarth VadnanerPas encore d'évaluation
- Algebre 5 Polynomes Et OperationsDocument12 pagesAlgebre 5 Polynomes Et OperationsMabika UrsulePas encore d'évaluation
- 655 - Brochure DosDocument6 pages655 - Brochure DosJesusVasquezLopezPas encore d'évaluation
- Cours - Démarche de Diagnostic - ProfDocument6 pagesCours - Démarche de Diagnostic - ProfOlivier FLOHRPas encore d'évaluation
- Deman Visa FR 2019Document3 pagesDeman Visa FR 2019natanelovaPas encore d'évaluation
- Amphi 2 (17-09-2020)Document34 pagesAmphi 2 (17-09-2020)Mahamat NourPas encore d'évaluation