Commande Foc Msap
Commande Foc Msap
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- 650 Freewind PDFDocument64 pages650 Freewind PDFRobert100% (1)
- Mini Projet: Modélisation (Et Simulink) Du MSAPDocument18 pagesMini Projet: Modélisation (Et Simulink) Du MSAPayoub93% (45)
- Chapitre 1 Modélisation de La Machine Asynchrone Double Étoile Et Son AlimentationDocument38 pagesChapitre 1 Modélisation de La Machine Asynchrone Double Étoile Et Son AlimentationOmari GE50% (4)
- Nouveau Document Microsoft Office Word 0Document18 pagesNouveau Document Microsoft Office Word 0arif amira100% (1)
- Compte Rendu Mas MCC MsDocument24 pagesCompte Rendu Mas MCC MsAbderrazzak TaPas encore d'évaluation
- Cours MSAP M2ME UMBB 2022Document51 pagesCours MSAP M2ME UMBB 2022Aklil MPas encore d'évaluation
- Moteur CCDocument8 pagesMoteur CCthe_modestPas encore d'évaluation
- Les Machines AsynchronesDocument20 pagesLes Machines Asynchronesbedoui marwenPas encore d'évaluation
- Machine À Courant Continu - WikipédiaDocument28 pagesMachine À Courant Continu - WikipédiaNantenaina Jacques BerthinoPas encore d'évaluation
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza Nabil100% (1)
- Les Moteurs À Courant Continu, Synchrone Et AsynchroneDocument11 pagesLes Moteurs À Courant Continu, Synchrone Et AsynchroneHamza NabilPas encore d'évaluation
- Commande D'une Génératrice Asynchrone Double Stator Intégrée Dans Un Système Éolien À Vitesse VariableDocument19 pagesCommande D'une Génératrice Asynchrone Double Stator Intégrée Dans Un Système Éolien À Vitesse Variableعماد الدينPas encore d'évaluation
- GnkincteDocument20 pagesGnkinctesalahouchenesalahPas encore d'évaluation
- Chapitre 1Document18 pagesChapitre 1Oumaima JORAICHEPas encore d'évaluation
- Sans Nom 1Document10 pagesSans Nom 1Main VertePas encore d'évaluation
- 2cours Technique de Commande de La Vitesse MAS 2ème Chapitre 2020Document13 pages2cours Technique de Commande de La Vitesse MAS 2ème Chapitre 2020Sa BinPas encore d'évaluation
- Var - Chap - 3 - Modélisation Et Commande de MAS V1Document22 pagesVar - Chap - 3 - Modélisation Et Commande de MAS V1Rayane KORA ZAKIPas encore d'évaluation
- MS MoteurDocument21 pagesMS MoteurFarid OudjamaPas encore d'évaluation
- Compte Rendu Machines Électriques 2 - 1Document22 pagesCompte Rendu Machines Électriques 2 - 1xrsbsk5qd4Pas encore d'évaluation
- Principe de Fonctionnement Des Machines AsynchronesDocument3 pagesPrincipe de Fonctionnement Des Machines AsynchronesSa rahPas encore d'évaluation
- MOCN ProjetDocument10 pagesMOCN Projetboubeghla nadirPas encore d'évaluation
- Cours 6Document7 pagesCours 6mohamed nasrilarbiPas encore d'évaluation
- Machines SynchronesDocument12 pagesMachines SynchronesZaki LarabaPas encore d'évaluation
- Mini ProjetDocument13 pagesMini ProjetHoussine Gue100% (4)
- Cours 2 - Machine SynchroneDocument52 pagesCours 2 - Machine SynchroneAbdeLilah Ait TajerPas encore d'évaluation
- Chapitre 3 Entrainements ElectriquesDocument29 pagesChapitre 3 Entrainements Electriquesdanazevedo82Pas encore d'évaluation
- Expose Chapitre 5 LotfiDocument23 pagesExpose Chapitre 5 LotfiThe AlgerianmanPas encore d'évaluation
- Le Moteur Asynchrone TriphaseDocument8 pagesLe Moteur Asynchrone TriphaseaminePas encore d'évaluation
- Exposé MasyncDocument11 pagesExposé MasyncLéon AgbessiPas encore d'évaluation
- Cours 9Document6 pagesCours 9mohamed nasrilarbiPas encore d'évaluation
- Machine AsynchroneDocument6 pagesMachine AsynchroneRedouane Elkissouni100% (2)
- Modélisation Par Représentation D'état de La MAS Avec SimulinkDocument11 pagesModélisation Par Représentation D'état de La MAS Avec SimulinkMohammed Reda GailaPas encore d'évaluation
- Moteur A Courant ContinueDocument3 pagesMoteur A Courant Continuedj.amin07100% (1)
- Modelisation CMD MSAPDocument35 pagesModelisation CMD MSAPKoukou AmkoukouPas encore d'évaluation
- Chapitre I: Notions Sur La Commande Des Machines ÉlectriquesDocument9 pagesChapitre I: Notions Sur La Commande Des Machines ÉlectriquesGhedir NaouelPas encore d'évaluation
- Mini ProjetDocument12 pagesMini ProjetWail Nou00Pas encore d'évaluation
- Cours ACM Chapitre 1Document11 pagesCours ACM Chapitre 1norediene aouadjPas encore d'évaluation
- Cours - Commande MSAP - S5Document102 pagesCours - Commande MSAP - S5nlgouaina99Pas encore d'évaluation
- Moteur AsynchroneDocument9 pagesMoteur AsynchroneKERKOUD AimenPas encore d'évaluation
- Asservissement de Vitesse D'une Charge Entrainée Par Un Moteur À Courant Continu, À Excitation Séparée ConstanteDocument24 pagesAsservissement de Vitesse D'une Charge Entrainée Par Un Moteur À Courant Continu, À Excitation Séparée ConstanteAlfredho ShactarPas encore d'évaluation
- Chapitre 1 - Moteur Universil Et Takimetre À CCDocument28 pagesChapitre 1 - Moteur Universil Et Takimetre À CCChoaib BendahouPas encore d'évaluation
- Historique: I.1 Eléments Constituant de La Machine AsynchroneDocument12 pagesHistorique: I.1 Eléments Constituant de La Machine Asynchronebenke manouPas encore d'évaluation
- Chapitre II Partie ThéoriqueDocument26 pagesChapitre II Partie ThéoriqueZoubir TerfayaPas encore d'évaluation
- Moteur AsynchroneDocument9 pagesMoteur AsynchroneYassine ZaharPas encore d'évaluation
- Machine SynchroneDocument9 pagesMachine SynchroneEL HAFIANI MOUADPas encore d'évaluation
- Chapitre II MASDocument31 pagesChapitre II MAShawewi100% (1)
- Comparatif Machines ElectriquesDocument0 pageComparatif Machines ElectriquesmarwitosPas encore d'évaluation
- Commande Du Moteur AsynchroneDocument78 pagesCommande Du Moteur AsynchroneTHONYPas encore d'évaluation
- Cours N°3 Modélisation de La Machine SynchroneDocument26 pagesCours N°3 Modélisation de La Machine SynchroneNour zPas encore d'évaluation
- Partie ThéoriqueDocument8 pagesPartie ThéoriquewissemPas encore d'évaluation
- Machine Tournante À Courant AlternatifDocument6 pagesMachine Tournante À Courant AlternatifSofiane HAMCHAOUIPas encore d'évaluation
- Modélisation - MASDocument42 pagesModélisation - MASfarid saadPas encore d'évaluation
- Modélisation Machine AsynchroneDocument5 pagesModélisation Machine AsynchroneMohammed Reda GailaPas encore d'évaluation
- Réglage de La Vitesse de RotationDocument13 pagesRéglage de La Vitesse de Rotationous1990Pas encore d'évaluation
- Chapitre 1 (Introduction Générales) AthmaniDocument18 pagesChapitre 1 (Introduction Générales) AthmaniSamroura YessadPas encore d'évaluation
- Machine Synchrone - WikipédiaDocument16 pagesMachine Synchrone - Wikipédiahassanfofana103Pas encore d'évaluation
- 5Document18 pages5Reda SebaaPas encore d'évaluation
- TP MasDocument16 pagesTP MasMajected92100% (1)
- L’énergie éolienne: Cours, exercices et problèmes corrigésD'EverandL’énergie éolienne: Cours, exercices et problèmes corrigésPas encore d'évaluation
- Exercices d'optique et d'électromagnétismeD'EverandExercices d'optique et d'électromagnétismeÉvaluation : 5 sur 5 étoiles5/5 (1)
- 4821 Elements de Corrige Sous Epreuve U52 Bts Mci Session 2014Document8 pages4821 Elements de Corrige Sous Epreuve U52 Bts Mci Session 2014Anis Nehari2021Pas encore d'évaluation
- Mon Rapport de Stage ZAMBO en Voie de FinitionDocument27 pagesMon Rapport de Stage ZAMBO en Voie de FinitionkennedyMaudreyne71Pas encore d'évaluation
- Correction Train EpicycloidalDocument3 pagesCorrection Train Epicycloidalfrederic sateraPas encore d'évaluation
- Cours de Sismologie Et G Enie ParasismiqueDocument75 pagesCours de Sismologie Et G Enie ParasismiqueAbdelkader SafaPas encore d'évaluation
- LRN-JRN FR 50HzDocument16 pagesLRN-JRN FR 50Hzabbes ben hemanaPas encore d'évaluation
- MDS CH-21Document24 pagesMDS CH-21AyoubPas encore d'évaluation
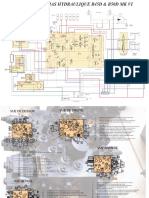
- Schemas Hydraulique - B45D B50D - Mk4 A Mk7 FrenchDocument2 pagesSchemas Hydraulique - B45D B50D - Mk4 A Mk7 FrenchalvaroPas encore d'évaluation
- HangarDocument75 pagesHangarSanae El YamaniPas encore d'évaluation
- Fascicule 70Document419 pagesFascicule 70totobreizh100% (3)
- TP MDFDocument11 pagesTP MDFMusta Bhmd100% (2)
- Guide MaintenanceDocument6 pagesGuide MaintenanceQuentin Da silvaPas encore d'évaluation
- ? Histoire de La Thermodynamique Classique - Définition Et ExplicationsDocument8 pages? Histoire de La Thermodynamique Classique - Définition Et ExplicationsAPPOLON Le NackyPas encore d'évaluation
- Chapitre 3 Adherence Béton AcierDocument13 pagesChapitre 3 Adherence Béton AcierDjamel Eddine BOURIPas encore d'évaluation
- DEEA - FF. Synthèse N°1 - SujetDocument13 pagesDEEA - FF. Synthèse N°1 - SujetAbdessalam ShPas encore d'évaluation
- Manuel Talia GreenDocument36 pagesManuel Talia GreenOvo BabaAzizi Ovo100% (1)
- Machines À Courant Continu MCC: 2.1 GénéralitésDocument9 pagesMachines À Courant Continu MCC: 2.1 GénéralitésHamza ZakiPas encore d'évaluation
- APPLICATIONDocument2 pagesAPPLICATIONfabrication mecaniquePas encore d'évaluation
- Rapport de Stage D Observation Geni Mecanique On Afrique TraveauxDocument44 pagesRapport de Stage D Observation Geni Mecanique On Afrique TraveauxAymen Hssaini0% (1)
- F0332 SilentblocDocument10 pagesF0332 Silentblocballa tattaguinePas encore d'évaluation
- Régulation IndustrielleDocument2 pagesRégulation IndustrielleDiaa Eddine BoudiafPas encore d'évaluation
- Devoir de Synthèse N°1 2011 2012 (Taher Elhaded El Hamma)Document5 pagesDevoir de Synthèse N°1 2011 2012 (Taher Elhaded El Hamma)Youssef CherniPas encore d'évaluation
- Correction EMD 2 MMC 2013Document1 pageCorrection EMD 2 MMC 2013PFEPas encore d'évaluation
- TD 2 Thermodynamique Corrigé PDFDocument4 pagesTD 2 Thermodynamique Corrigé PDFamiramPas encore d'évaluation
- Examen Becm 2018 Pass PDFDocument9 pagesExamen Becm 2018 Pass PDFSoűFiane HãnnāøuiPas encore d'évaluation
- Tour Parallèle 2 PDFDocument6 pagesTour Parallèle 2 PDFAbi ClémentPas encore d'évaluation
- Équipement Électrique: CaractéristiquesDocument37 pagesÉquipement Électrique: CaractéristiquesDAGORNPas encore d'évaluation
- BTS CPI U51 2015 Elements de CorrigeDocument10 pagesBTS CPI U51 2015 Elements de CorrigeAbdel Elouaer100% (1)
- Physique - Lycee de Banyo - Evaluations Harmonisees de La 2ème Sequence - Seconde (2nde C) CamerounDocument2 pagesPhysique - Lycee de Banyo - Evaluations Harmonisees de La 2ème Sequence - Seconde (2nde C) CamerounmiguelemmuelPas encore d'évaluation
- Liste BE GeotechniqueDocument3 pagesListe BE GeotechniqueJames Jatmiko OetomoPas encore d'évaluation