TPC45 - Pont Roulant
TPC45 - Pont Roulant
Télécharger au format pdf ou txt
Vous aimerez peut-être aussi
- Correction TD Capteur Actionneur 22042020 PDFDocument4 pagesCorrection TD Capteur Actionneur 22042020 PDFAmdouni Ameni100% (2)
- Verin HydrauiqueDocument6 pagesVerin HydrauiqueYounes KaderPas encore d'évaluation
- TP Tia PortaleDocument19 pagesTP Tia PortaleMustafa Semmaa80% (5)
- TP TSI Asservissement-Scilab - FinalDocument5 pagesTP TSI Asservissement-Scilab - FinalGribyPas encore d'évaluation
- Tuto PspiceDocument10 pagesTuto PspicevikinnnPas encore d'évaluation
- TP - DTS Réacteur CarberryDocument2 pagesTP - DTS Réacteur Carberryamine aousPas encore d'évaluation
- TP Sii2018Document24 pagesTP Sii2018fatimaPas encore d'évaluation
- Premiere Sujet 2 2020 Specialite Sciences de L IngenieurDocument12 pagesPremiere Sujet 2 2020 Specialite Sciences de L IngenieurphilPas encore d'évaluation
- Exercice 1 - Moteur À Courant ContinuDocument9 pagesExercice 1 - Moteur À Courant ContinuKOUADIO PATRICEPas encore d'évaluation
- Realisation Du Vumetre Digital-1Document8 pagesRealisation Du Vumetre Digital-1Moise UfoyrwothPas encore d'évaluation
- Premiere Sujet 1 2020 Specialite Sciences de L IngenieurDocument13 pagesPremiere Sujet 1 2020 Specialite Sciences de L IngenieurphilPas encore d'évaluation
- TPs Electronique de PuissanceDocument12 pagesTPs Electronique de Puissancejunior joelPas encore d'évaluation
- TPAsservissements MatlabDocument9 pagesTPAsservissements Matlabrobin barracouPas encore d'évaluation
- S S S 'I: GrafcetDocument12 pagesS S S 'I: Grafcetzoemodo ousmanePas encore d'évaluation
- AP2 - Chaîne D'énergie Mécanique VAE-Excel-2014Document6 pagesAP2 - Chaîne D'énergie Mécanique VAE-Excel-2014beiebfyhfzPas encore d'évaluation
- Sujet TP 2023 2024Document13 pagesSujet TP 2023 2024fotsoarolePas encore d'évaluation
- Série 19 4ST NR 2024 CompteursDocument4 pagesSérie 19 4ST NR 2024 CompteursAbdelbasset ZaiechPas encore d'évaluation
- Chariot de SoudureDocument23 pagesChariot de SoudureAyoub AbidiPas encore d'évaluation
- Chariot de SoudureDocument23 pagesChariot de SoudureAyoub AbidiPas encore d'évaluation
- TD Premier OrdreDocument7 pagesTD Premier OrdreYoussef RagraguiPas encore d'évaluation
- 6115 Enonce Verin 6 AxesDocument6 pages6115 Enonce Verin 6 AxesMohammed RedPas encore d'évaluation
- TP05 CorDocument6 pagesTP05 CorVirginie BoussaudPas encore d'évaluation
- Pid NiveauDocument7 pagesPid NiveauAbderraouf HARCHEPas encore d'évaluation
- TP Spe Serie 2 3 Structurel Dynamique Pilote ElectriqueDocument2 pagesTP Spe Serie 2 3 Structurel Dynamique Pilote ElectriqueAlexandre LamPas encore d'évaluation
- EXAMEN SYNTHESE 2021 AII (Test2) PDFDocument5 pagesEXAMEN SYNTHESE 2021 AII (Test2) PDFSoufiane KhaliliPas encore d'évaluation
- 43 Exercices EngrenageDocument9 pages43 Exercices EngrenageIlyas MhammediPas encore d'évaluation
- TP Automatique Abdelbadii22Document18 pagesTP Automatique Abdelbadii22Brahim BenomarPas encore d'évaluation
- 6GEI630-20083 Lab 1 Asservissement D'un Moteur DC (M1)Document8 pages6GEI630-20083 Lab 1 Asservissement D'un Moteur DC (M1)Yahia NinoPas encore d'évaluation
- Pompe Hydraulique Pour Engin Lourds PDFDocument67 pagesPompe Hydraulique Pour Engin Lourds PDFJawher SalemPas encore d'évaluation
- Électronique de Puissance Laboratoire Nº1 Simulation Des Convertisseurs StatiquesDocument5 pagesÉlectronique de Puissance Laboratoire Nº1 Simulation Des Convertisseurs StatiquesFake ShtemaruPas encore d'évaluation
- Tutorat SimPower System Pour TP EPDocument10 pagesTutorat SimPower System Pour TP EPyasserrx4Pas encore d'évaluation
- TP Matlab Machine A Courant Continu Par Armel Sitou AfanouDocument15 pagesTP Matlab Machine A Courant Continu Par Armel Sitou AfanouZied Omar0% (1)
- TP MoteurDocument4 pagesTP MoteurAmine AlaouiPas encore d'évaluation
- Contrôle 4 - 2023Document4 pagesContrôle 4 - 2023Bilal LaakelPas encore d'évaluation
- Laboratoire 1Document9 pagesLaboratoire 1Jean-Pierre AwuPas encore d'évaluation
- DS3 SlciDocument4 pagesDS3 SlciAbdelKarim dergoulPas encore d'évaluation
- TP Automatique LGE - 2024Document40 pagesTP Automatique LGE - 2024ngonoufrank237Pas encore d'évaluation
- TP PSIM Monte ChargeDocument6 pagesTP PSIM Monte ChargePenda NiassPas encore d'évaluation
- TP Moteur CC Tapis EleveDocument4 pagesTP Moteur CC Tapis EleveHatem LaajiliPas encore d'évaluation
- 6117 Enonce DaeDocument5 pages6117 Enonce DaenajibPas encore d'évaluation
- RESUMES TFC Richard NkuluDocument18 pagesRESUMES TFC Richard NkuluRichard NkuluPas encore d'évaluation
- RevMP Sii AutomatiqueDocument30 pagesRevMP Sii AutomatiqueRebbag AnassPas encore d'évaluation
- Sahie Elie - Cer - p5Document20 pagesSahie Elie - Cer - p5Elie SahiePas encore d'évaluation
- tp2 MoteurDocument11 pagestp2 MoteurGvd Hope100% (1)
- TP AsservisementDocument6 pagesTP AsservisementZaineb Ben AbdallahPas encore d'évaluation
- AII - TH - FF 2011 v1Document7 pagesAII - TH - FF 2011 v1akharrazabdessamad0096Pas encore d'évaluation
- TP3 4 Applications A Base de Circuit NE555Document9 pagesTP3 4 Applications A Base de Circuit NE555hajjiPas encore d'évaluation
- TP No8 Poste Automatique de Controle A La Pression CorrigeDocument8 pagesTP No8 Poste Automatique de Controle A La Pression CorrigeYounes Mouhoub50% (2)
- CI SLCI 2 Suj RobotinoDocument6 pagesCI SLCI 2 Suj RobotinoNadim HafsiPas encore d'évaluation
- Theme7 InertieDocument7 pagesTheme7 Inertieellyesbenaissa7Pas encore d'évaluation
- TP6 ScilabDocument6 pagesTP6 ScilabkhawlaaaaPas encore d'évaluation
- TP 124 CompletDocument10 pagesTP 124 CompletNathalie MakoumboPas encore d'évaluation
- CCMP PSI 2021 BassinTractionLHEEA SujetDocument36 pagesCCMP PSI 2021 BassinTractionLHEEA SujetNizar SahidPas encore d'évaluation
- 20 Cours - Correction Des SLCIDocument15 pages20 Cours - Correction Des SLCISilouane HubertPas encore d'évaluation
- Introduction PsimDocument8 pagesIntroduction PsimRahim SelatniaPas encore d'évaluation
- AlgoDocument142 pagesAlgoanonymeeeePas encore d'évaluation
- 33 - Labo - SIC 33-24-9-2 - Generatrice CompoundDocument23 pages33 - Labo - SIC 33-24-9-2 - Generatrice Compoundمحمد الأمين سنوساويPas encore d'évaluation
- Remplissage d'inondation: Flood Fill : Explorer le terrain dynamique de la vision par ordinateurD'EverandRemplissage d'inondation: Flood Fill : Explorer le terrain dynamique de la vision par ordinateurPas encore d'évaluation
- Suppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurD'EverandSuppression des lignes cachées: Dévoiler l'invisible : les secrets de la vision par ordinateurPas encore d'évaluation
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- Vérins Double EffetDocument2 pagesVérins Double EffetElias KinzigerPas encore d'évaluation
- Guidage en Translation PDFDocument141 pagesGuidage en Translation PDFkharrat samir100% (1)
- Sch-Ma-Cablage-Distributeurs 2Document2 pagesSch-Ma-Cablage-Distributeurs 2OMAR SECKPas encore d'évaluation
- PDR Actionneurs ValvitaliaDocument1 pagePDR Actionneurs ValvitaliaHADJER KEDDARPas encore d'évaluation
- TD RDM Traction - CompressionDocument2 pagesTD RDM Traction - Compressionomardzst100% (7)
- 008 S 06 01 Eval StatiqueDocument1 page008 S 06 01 Eval StatiquesedmorabetPas encore d'évaluation
- Rapport de TP de MecaniqueDocument8 pagesRapport de TP de MecaniqueHenry JOSIASPas encore d'évaluation
- Cours 01 AutomatismeDocument20 pagesCours 01 AutomatismenadirPas encore d'évaluation
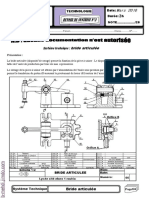
- Devoir de Synthèse N°2 - Technologie - 2ème Sciences (2009-2010) MR Mahdi HannachiDocument4 pagesDevoir de Synthèse N°2 - Technologie - 2ème Sciences (2009-2010) MR Mahdi HannachiMy profilePas encore d'évaluation
- FR - Actuator - Guide de Choix Des Vérins PDFDocument32 pagesFR - Actuator - Guide de Choix Des Vérins PDFMAROIENE50% (2)
- Document de Synthèse Du Stage 725 730Document35 pagesDocument de Synthèse Du Stage 725 730Chakroune100% (1)
- MP Si 1Document15 pagesMP Si 1Ange wilfried FofanaPas encore d'évaluation
- Manual de Servicio-10130Document54 pagesManual de Servicio-10130Marcelo Daniel GutierrezPas encore d'évaluation
- Ressource DistributeursDocument5 pagesRessource DistributeursRodolphe AmoiPas encore d'évaluation
- TD2 Automatisme MECA2Document4 pagesTD2 Automatisme MECA2RyemPas encore d'évaluation
- Rapport de Stage (Nadime KADIM)Document43 pagesRapport de Stage (Nadime KADIM)Amgdoul HatimPas encore d'évaluation
- CRIC Rouleur 4TDocument10 pagesCRIC Rouleur 4Tmohamedkane.ingeniousPas encore d'évaluation
- PART - 2-Automatisme Et Informatique Industrielle - GrafcetDocument17 pagesPART - 2-Automatisme Et Informatique Industrielle - GrafcetMaacha OssamaPas encore d'évaluation
- 6 GemmaDocument5 pages6 GemmaSerge RINAUDOPas encore d'évaluation
- Correctiontd1 Api21Document49 pagesCorrectiontd1 Api21Amira Jbeli100% (3)
- REPARATION U35-3a3 KX101-3a3 RY921-2130-0 - WSM - PDocument126 pagesREPARATION U35-3a3 KX101-3a3 RY921-2130-0 - WSM - PJean-michel HuetPas encore d'évaluation
- Module HydrauliqueDocument35 pagesModule HydrauliqueAziz Kabore100% (2)
- CX 300Document28 pagesCX 300Gweltaz PieguPas encore d'évaluation
- Conception MecaniqueDocument86 pagesConception Mecaniquetarek100% (1)
- Megueddem Mohammed YazidDocument86 pagesMegueddem Mohammed YazidhalifPas encore d'évaluation
- Nettoyeur Plage AnalyseDocument3 pagesNettoyeur Plage AnalyseMohsen SaidiPas encore d'évaluation
- W450311D FR Insight Terex Calibration Troubleshooting FrenchDocument41 pagesW450311D FR Insight Terex Calibration Troubleshooting FrenchcherifPas encore d'évaluation
- 223 Les Actionneurs PDFDocument17 pages223 Les Actionneurs PDFTriki BilelPas encore d'évaluation