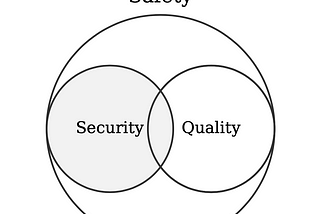
Víctor Mayoral VilchesQuality, safety and security in roboticsFor the last fifty years, we have witnessed the dawn of the robotics industry. But robots have not been created with security as a concern…Apr 19, 2020Apr 19, 2020
Víctor Mayoral VilchesMulti-robot coordination: Distributed synchronization of industrial robots through ROS 2Multi-robot coordination. Distributed synchronization of industrial robots through ROS2May 25, 2019May 25, 2019
Víctor Mayoral VilchesModularity for unifying roboticsThis article provides a sneak peek into the upcoming session “System integration and modularity in robotics using ROS”, which will be given…Sep 26, 2018Sep 26, 2018
Víctor Mayoral VilchesinHackerNoon.comTime Synchronization in modular collaborative robotsIntroducing M-cobots, modular collaborative robotsSep 20, 2018Sep 20, 2018
Víctor Mayoral VilchesinHackerNoon.comTowards a distributed and real-time framework for robotsEvaluation of ROS 2.0 communications for real-time robotic applicationsSep 11, 20181Sep 11, 20181
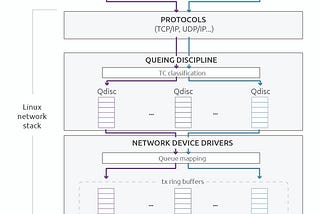
Víctor Mayoral VilchesinHackerNoon.comReal-time Linux communicationsAn evaluation of the Linux communication stack for real-time robotic applicationsSep 5, 2018Sep 5, 2018
Víctor Mayoral VilchesinHackerNoon.comAccelerated robot training through simulation in the cloud with ROS and GazeboIntroducing the robot_gym frameworkSep 4, 20181Sep 4, 20181
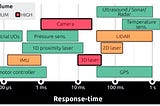
Víctor Mayoral VilchesinHackerNoon.comTime-Sensitive Networking for roboticsEthernet with TSN standards will become the de facto standard for communications on layers 1 and 2, in robotics.Apr 27, 2018Apr 27, 2018
Víctor Mayoral VilchesinSilicon Valley RoboticsTowards fully reconfigurable robotsFrom programming to training machinesMar 14, 2018Mar 14, 2018
Víctor Mayoral VilchesinHackerNoon.comIntroducing the Hardware Robot Information Model (HRIM)A standard interface for robot modules.Feb 6, 2018Feb 6, 2018