Galley Proof
15/12/2017; 14:54
File: idt–1-idt305.tex; BOKCTP/xhs p. 1
1
Intelligent Decision Technologies -1 (2017) 1–9
DOI 10.3233/IDT-170305
IOS Press
Towards a cognitive warning system for safer
hybrid traffic
Ágoston Töröka,b,c,∗ , Krisztián Vargad , Jean-Marie Pergandie , Pierre Mallete , Ferenc Honbolygóa,c ,
Valéria Csépea and Daniel Mestree
Brain Imaging Centre, Research Centre for Natural Sciences, Hungarian Academy of Sciences, Budapest,
Hungary
b
Systems and Control Laboratory, Institute for Computer Science and Control, Hungarian Academy of Sciences,
Budapest, Hungary
c
Department of Cognitive Psychology, Eötvös Loránd University, Budapest, Hungary
d
Nokia Bell Labs, Budapest, Hungary
e
Aix-Marseille University, Marseille Cedex 09, France
a
Abstract. Technological development brings increasingly closer the era of widely available self-driving cars. However, presumably there will be a time when human drivers and self-driving cars would share the same roads. In the current paper, we propose
a cognitive warning system that utilizes information collected from the behaviour of the human driver and sends warning signals
to self-driving cars in case of human related emergency. We demonstrate that such risk detection can identify danger earlier than
an external sensor would, based on the behaviour of the human-driven vehicle. We used data from a simulator experiment, where
21 participants slalomed between road bumps in a virtual reality environment. Occasionally, they had to react to dangerous roadside stimuli by large steering movements. We used one-class SVM to detect emergency behaviour in both steering and vehicle
trajectory data. We found earlier detection of emergency based on steering wheel data, than based on vehicle trajectory data. We
conclude that tracking cognitive variables of the human driver means that we can utilize the outstanding power of the brain to
evaluate external stimuli. Information about the result of this evaluation (be it steering action or saccade) could be the basis of a
warning signal that is readily understood by the computer of a self-driving car.
Keywords: Warning system, driver behaviour, one-class SVM, t-SNE
1
2
3
4
5
6
7
8
9
1. Introduction
Since 2009, when Google started testing Google
Chauffeur driven cars, they accomplished driving over
1.5 million miles with only 22 documented minor accidents [1]. Interestingly, human error was found underlying all but one of these [2]. This warns to the
fact that in spite of self-driving cars being a safer
mode of transportation [3], a hybrid traffic of humandriven and self-driving cars is still prone to human
∗ Corresponding
author: Ágoston Török, Brain Imaging Centre,
Research Centre for Natural Sciences, Hungarian Academy of Sciences, Magyar tudósok körútja 2. Budapest 1117, Hungary. Tel.: +36
1 382 6819; E-mail: torok.agoston@ttk.mta.hu.
faults. Human drivers are object to biological limitations (e.g. drowsiness) and tend to do multitasking in
the car, thus providing suboptimal response in emergency situations [4]. Several in-car warning system designs have been implemented in order to reduce the
risk of fatal outcomes [5]. In the present paper, we
propose that these warning systems should not only
raise the driver’s attention, but could be also used to
inform other participants of the traffic, namely selfdriving cars.
Widespread availably of passenger cars in the middle of the 20th century raised attention to traffic
safety [9]. Since then, several different kinds of accident risk evaluation systems have been proposed.
Amongst these we can distinguish three main types
ISSN 1872-4981/17/$35.00 c 2017 – IOS Press and the authors. All rights reserved
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
�Galley Proof
2
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
15/12/2017; 14:54
File: idt–1-idt305.tex; BOKCTP/xhs p. 2
Á. Török et al. / Towards a cognitive warning system for safer hybrid traffic
based on the source of data they use for estimation.
These are (1) traffic data based, (2) car position based,
and (3) driver behaviour based approaches. Traffic
data-based approaches are typically based on traffic
surveillance data and use that to evaluate the risk of
accident depending on timeslot, traffic frequency and
area (highway, intersection) [10–14]. Not entirely different from these systems [15–17] are those that work
on the single car basis and use sensors of the master vehicle to predict risks of the peers. Current self-driving
concept cars rely mostly on this technology [18]. The
third type of risk evaluation systems is the set of systems that collect information from the driver. Driver
behaviour-based models use gaze [19,20], facial coding [19,21], EEG [22,23], and motion trajectories [24–
26] recorded with various sensors. These solutions give
very good real-time estimates that can be used to warn
the driver for a potential risk of falling asleep [24,27],
driving through a red light [26], or for optimal lanechanging trajectory [28]. Here, we propose that these
warnings could help the hybrid traffic of human-driven
and self-driving cars in the future. This way they work
more as a communication channel between two agents
and not as a one-way sensor, hence the term cognitive
in the title.
While a human driver may not be able to evaluate
a warning message from a lead car in a couple milliseconds, this is not a problem for the processor of a
self-driving car. Automated vehicles constantly monitor their surroundings with several sensors to provide
the safest transportation possible [29]. Nonetheless, information collected inside the car’s cockpit may forego
the externally detectable risk with tens or, sometimes,
hundreds of milliseconds. This is true even if we take
the steering wheel, where there is a few millisecond
delay between the steering action and the chassis response [30]. Thus, these warnings may be extremely
helpful for self-driving cars.
The proposed solution could be a good example of
how biological and artificial cognitive agents could
co-evolve [31,32], emerging in a safer traffic infrastructure. The current proposal is not the first that
promote consideration of cognitive factors in traffic
safety [9,33,34], or increased communication between
traffic participants [35,36]. However, it is unique in its
emphasis on human-to-machine information flow. Ongoing research [17,29,36,37] is focusing on the design
of optimal wireless communication between vehicles
(vehicle to vehicle, V2V) and between vehicles and
road-side units (vehicle to infrastructure, V2I). These
122
communication links support efficiently the drivers’
situational awareness. Although situational awareness
often refers to human situational awareness [38], it
bears relevance also in human-machine (or possibly
even in machine-machine) situations as a general concept of information availability and use in an interaction [39]. To demonstrate whether we can potentially
facilitate situational awareness of a machine, we validate our idea by predicting abrupt steering wheel turn
actions of a human driver in a virtual reality simulator paradigm. Here, from time to time the driver had to
make emergency steering movements to roadside stimuli [40]. In the present analysis we used the car trajectory and the steering wheel angle data to investigate
how early we can detect the initiation of an emergency
steering behaviour only based on data from either external sensor.
In the current proof-of-concept implementation we
used a one-class support vector machine (OC-SVM).
SVM [41–43] is a set of machine learning models that
uses support vectors (i.e. hyperplanes) in high dimensional space for classification and regression problems.
Our choice of model was motivated by three main reasons. First, SVM solutions are fast and are often used
in real-time applications [44]. Second, such a model
can be extended, for example, a recent study presented
a hybrid model of an OC-SVM and a deep belief network that outperformed a deep autoencoder in terms
of speed on an anomaly detection task in high dimensional data [45]. Third, SVM can be trained even on
computers with modest processing power. This latter
argument is important since the current ideas may later
give birth to an actual product. Presumably, people
who cannot afford buying new self-driving cars would
adhere to using human-driven cars, and thus would be
the target audience of such an instrument. This facilitates the design of an efficient, yet inexpensive device.
We hypothesized that abrupt steering movements
can be readily detected using both steering and car
trajectory data. Moreover, we predicted that emergency events are detected earlier based on steering
than on trajectory data. We aimed to propose a general
anomaly detection system that could potentially use
multidimensional data (e.g. EEG, eye-tracking etc.).
These sensors could provide even earlier detection of
an emergency [46]. Therefore we did not include any
prior expectation of the dangerous events, only data of
normal driving and hence the use of OC-SVM.
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
�Galley Proof
15/12/2017; 14:54
File: idt–1-idt305.tex; BOKCTP/xhs p. 3
Á. Török et al. / Towards a cognitive warning system for safer hybrid traffic
3
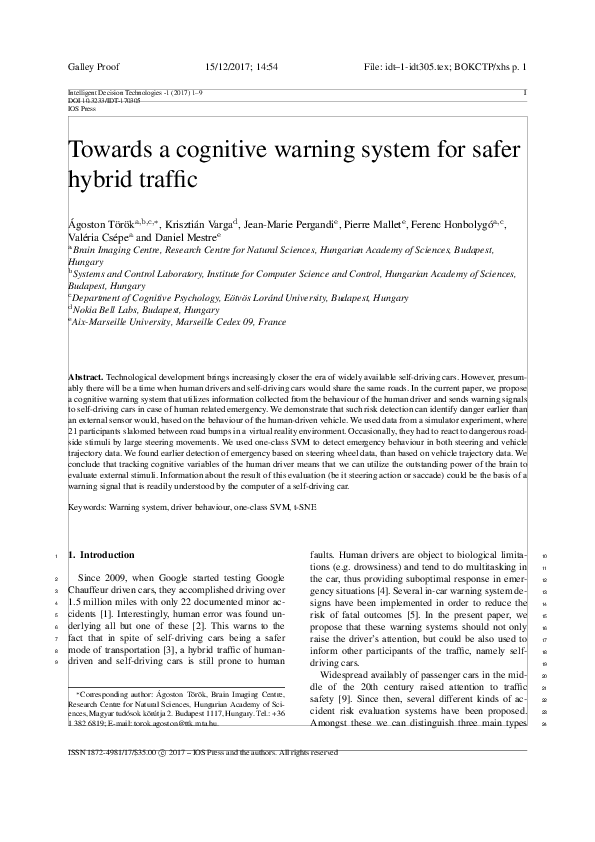
Fig. 1. The experimental design. (a) Participants had to slalom through road bumps on a rural road. (b) From time to time, a deer raised up its
head from the bushes. If the animal was facing to the road they had to steer to the other end of the road. If the deer looked the other direction they
did not have to do anything. The red rectangle serves illustrative purposes.
123
2. Methods
124
2.1. Participants
146
Twenty-three participants took part in the virtual
reality experiment. Two of them experienced simulator sickness, therefore their data was excluded. The
training and test data were extracted from the steering and trajectory data of the remaining 21 participants (age M = 25.29, SD = 5.54 years; age range:
19–37 years; 10 men and 11 women). All of them
reported normal hearing and normal or corrected-tonormal vision. They were also tested for stereo vision
(Randot test) and stereo-projection was adjusted accordingly with the interpupillary distance. All participants were right-handed. Neither of the participants
had a history of neurological disorder or epilepsy. All
of them had valid driving license and frequently drove
a car in the past months. As inclusion criteria they had
at least 50,000 km driving experience prior to the experiment. Participants were recruited volunteers from
students of the Aix-Marseille University. Written informed consent was collected prior to the experiment,
and the experimental protocol was designed according
to the Declaration of Helsinki and was approved by the
local ethical committee.
147
2.2. Experiment
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
148
The experiment took place in a cave automatic virtual environment (CAVE [47]) at the Centre de la
180
149
Realité Virtuelle de la Mediterranean (CRVM), AixMarseille University. The CAVE consisted of three
backprojected, 3 by 4 meter side screens and a fiberglass screen of 3 by 3 meter on the floor. Two Barco
5000 lumen projectors illuminated each screen. Participants sat in a custom built car simulator consisting of
a car seat frame and a force feedback steering wheel
(Logitech G27). Sounds were coming from two loudspeakers placed on both sides of the car frame.
We designed a driving simulator game in Unity 3D,
where participants were told to drive on a rural road
bounded by bushes on both sides. The road was flat
and the scene did not contain other landmarks that may
have distracted the driver’s attention. The experiment
contained two kinds of tasks. Most of the time they had
to slalom between road bumps. The task required continuous left/right steering movements. The road bumps
appeared on both sides of the road to guarantee that
only small steering movements were used, and the trial
was only successful if the participant passed between
the two road bumps (see Fig. 1). A green disk placed
between the road bumps indicated the ideal position of
passing. Running over a road bump was signalled by
a small vibration on the steering wheel. This task was
sometimes interrupted by an emergency event.
The emergency event was the appearance of a deer
in the bushes, either on the left or on the right side of
the road. The orientation of the deer’s jaw signalled
whether a response was required or not (Go-NoGo
task). If the deer was facing the road it signalled emergency (Go signal), if it turned away then no response
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
�Galley Proof
4
15/12/2017; 14:54
Á. Török et al. / Towards a cognitive warning system for safer hybrid traffic
186
was required (NoGo signal). In case of emergency, participants were instructed to steer to the other side (i.e.
large steering movement) in order to avoid a collision.
If the orientation of the deer did not implicate emergency, the participants were instructed to execute the
primary task and not to react to the deer.
187
2.3. Procedure
181
182
183
184
185
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
File: idt–1-idt305.tex; BOKCTP/xhs p. 4
X=
~xn
~xi ∈ R
→
r4 ∇14 ∇24 ∇34
r5 ∇15 ∇25 ∇35
..
..
..
.. ,
.
.
.
.
rn ∇1n ∇2n ∇3n
where X is the input data of ~x vectors for n time
points. The dimensions of ~xi are r, which is either the
raw measurement of steering wheel angle or vehicle
position in the ith time point, and ∇1 , ∇2 , ∇3 , which
are the first, second and third order finite backward
differences in that time point i, respectively. The time
points start at 4 because third order finite backward differences were defined only after 3 data points.
Consequently, we had a four dimensional vector
available for every time point, which was used as the
input of the risk prediction model. This way the model
was able to handle short range dependencies of the
time-series data.
In the following we will refer the normal driving
data as no event and the emergency data as event. Thus
data points were in theory either normal (S) or emergency (S̄) points labels, these were denoted as +1 or
−1 such as
(
+1 if ~x ∈ S
y=
−1 if ~x ∈ S̄
The experiment started with a practice phase where
participants were familiarized with the task. We looked
for signs of simulator sickness to avoid unwanted discomfort caused by performing the task for a prolonged
period. The data used in the current analysis was collected from four 5 minute-long blocks. The participants were free to take a rest, stand up, walk and drink
between the blocks. The total duration of the experiment was approximately one hour, including breaks.
During the experiment, emergency events appeared
with 20% chance. Time between road bumps varied
between 300 and 1700 msec (distance: 5.9 m to 34 m
at 70 km/h speed). Emergency events always followed
a road bump with 650 to 700 msec and when they
appeared they were the closest visual target stimuli.
Emergency events were followed by road bump with
300 to 350 msec. This way the distance between the
two road bumps bounding the emergency event was
equal to the average distance of two road bumps. We
used this configuration to avoid that participants could
anticipate the emergency events.
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
where S = {no event} and S̄ = {event}
This means that we could have used the S̄ data
points and train a binary classifier. However, our aim
was to design a model that could detect any anomalies outside the normal range. Hence, we trained
separate one-class support vector machine models
(OC-SVM) for the steering angle and for the trajectory
data. The OC-SVM is finding a hyperplane that identifies the boundaries of the training pattern from the origin of the feature space F [52]. Because this is often
difficult in the original feature space, we mapped them
using function Φ and using a Gaussian (RBF) kernel
space transformation [53]. The kernel function was formulated as
2.4. Data preprocessing
Data preprocessing and modelling was done in
Python [48] using Pandas [49], Scikit-learn [50], visualisation was done using Matplotlib [51] and Seaborn.
Trajectory and steering angle data was logged in every
50 msec with high precision, according to the Unity
environment internal physics. Normal driving data was
extracted from the trajectories by selecting data points
outside the emergency events. Emergency event onsets
were defined as the moment when the deer become visible.
We defined the time window of the emergency
events from −100 msec 1900 msec, 0 msec being the
onset of the emergency stimulus. Both for the trajectory and for the steering angle we calculated first
(speed), second (acceleration) and third order (jerk)
derivatives using finite difference approximation, formulated as
~x4
~x5
..
.
exp(−γk~x − ~x′ k2 ),
262
226
245
246
247
248
249
250
251
252
253
254
255
256
257
γ = 0.25,
where γ is the kernel coefficient that defines how far
the influence of a single training example reaches,
where low values mean far and γ ∈ R|γ > 0, ~x′ are
the centroids. During training, one needs to solve the
quadratic programming problem of
258
259
260
261
�Galley Proof
15/12/2017; 14:54
File: idt–1-idt305.tex; BOKCTP/xhs p. 5
Á. Török et al. / Towards a cognitive warning system for safer hybrid traffic
of the time points to one and the other half to the other.
Because our aim was to build a model that uses both
general and personalized information, we did not split
the data to two pools of participants. The model gave
very small amount of false alarms on the validation set:
4.86% for the steering angle data and 4.06% for the
trajectory data. After this, we used the support vectors
of this model to detect the earliest anomaly point in
the event data. We expected significantly high detection rate of the emergency events, and earlier detection
of anomalies in the steering wheel data than in the trajectory data.
Emergencies were detected 645.15 (± 219.67) msec
after the onset of the event. In total 2735 emergency
events were detected and 8 remained undetected. As
can be seen in Fig. 2 this is in the beginning of the
trajectory curvature in the emergency trials meaning
that we detected emergency very early in time. On
the trajectory data anomalies were detected 734.54 (±
269.44) msec after the onset of the event, significantly
later than in the steering angle data (t(1530) = −17.24
p < 0.001). The detection rate was not different: 2736
emergency events were detected and 7 were undetected. The reason why steering angle made earlier detection possible is the non-linear relationship between
steering angle and vehicle position (see Fig. 3).
We visualized the anomaly detection thresholds
based on the validation set and emergency event data
points using the t-Distributed Stochastic Neighbour
Embedding (t-SNE) method [55]. This method efficiently visualizes high-dimensional data by using joint
probabilities of a low-dimensional embedding. The
transformation was run using the Barnes-Hut approximation in order to perform calculation in quasi-linear
time. The results of the t-SNE show that the no event
and emergency event data points are easily differentiable (see Fig. 4).
Summarizing the results, we found that emergency
events were readily detected both in wheel angle and in
trajectory data using a OC-SVM. Steering data made
possible earlier detection of emergency events than trajectory data.
Fig. 2. Detection time of Emergency from steering wheel and position data. We were able to predict emergency from steering data
earlier than from lateral position because of the non-linear relation
between steering angle and vehicle position. Whiskers show 95 %
confidence intervals for the mean.
n
min(~
ω , ξ, ρ)
263
that is subject to
1
1 X
ξi − ρ,
k~
ω k2 +
2
νn i=4
(~
ω · Φ (~xi )) > ρ − ξi ,
264
265
266
267
268
269
270
ν = 0.1
ξi > 0
here, n is the number of samples, ξi are the slack variables, ω
~ is the hyperplane weight vector, ρ is the bias
term. ν ∈ (0, 1] and this regularization parameter adds
an upper bound on the fraction of training errors and a
lower bound on the fraction of resulting support vectors. If ω and ρ solved the problem the following decision function is yielded
ŷ = sign ((~
ω · Φ(~x)) − ρ)
281
which yields positive values for S. Parameters were
chosen to generate the least amount of false alarms.
However because we cannot be certain that the training set does not include any accidental anomalies (i.e.
quick/large steering movements), we set the ν parameter so that the false alarm rate was around 5% (i.e. this
would mean 1 package/sec on average with the 20 Hz
sampling rate). This was used a fair trade-off between
earlier detection of emergency and more false alarms.
Shrinking heuristic was used in the training to speed
up optimization [54].
282
3. Results
271
272
273
274
275
276
277
278
279
280
283
As a first step, we divided the whole no event data to
training and validation sets by randomly assigning half
5
4. Discussion
332
284
In the current work we proposed an in-car risk detection and warning system that could inform automatic vehicles on the road about the cautious actions
of the human driver (e.g. abrupt steering movement,
falling asleep). We illustrated the benefits of the risk
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
�Galley Proof
6
15/12/2017; 14:54
File: idt–1-idt305.tex; BOKCTP/xhs p. 6
Á. Török et al. / Towards a cognitive warning system for safer hybrid traffic
Fig. 3. Relationship between steering angle and vehicle position. It can be on the two dimensional histogram, that the position of the vehicle
changes in a rather curvilinear manner relative to the steering angle (nova from the centres). The two dense centres are results of the slaloming
task, where the car was either going slightly left or slightly right, the smaller circular pattern around the centres also resulted from the slaloming
task. The histogram uses jet colormapping, which goes from blue through green to red.
Fig. 4. t-SNE embedding of no event and earliest detected emergency event data. The embedding method clearly visualizes the decision boundaries between event and no event data. Only a fraction
of 30.000 data points are displayed.
333
334
335
336
337
338
339
340
detection component by predicting dangerous steering
movements earlier from wheel angle data than from
vehicle trajectory data, because of the non-linear relationship between steering angle and vehicle lateral position [56,57].
We used one class support vector machine for learning and prediction. These type of models are common in outlier detection scenarios for various problems [45,58,59]. Note, that by controlling the sparsity
371
341
parameter of the SVM we can limit the number of support vectors used for prediction [54], there are even solutions to find the optimal number of support vectors
for a given problem [60]. Moreover, while training an
SVM (and potentially multitude of SVMs for each car
on the road) would be infeasible inside a master vehicle, our proposal leads to computational efficiency
since training and prediction could run on the individual peer vehicles. This fact opens the door to highly
individualized models.
We found earlier detection of risk in wheel angle
data than in trajectory data. Although this is in line
with the expectations (i.e. because of steering backlash, vehicle inertia, tire stiffness), a limitation of the
current study is that it was done in virtual reality.
While reactions in virtual reality are comparable to
those in the real-world [61], the physics of the virtual
environment are simpler than reality. Not speaking of
the large variance of normal driver behaviour in real
world scenarios. While in our case there were only two
tasks, outside of the simulator the driver faces all the
challenges of traffic. This necessitates further exploration under more naturalistic circumstances. Nonetheless, our choice of virtual reality was motivated by the
fact that only this way we were able to generate large
amount of clean and labelled data for training and test
without real risk of accident. Further studies should
evaluate the effectiveness of such a system with more
degrees of freedom. Here participants were only able
to control the steering wheel angle but not the speed
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
�Galley Proof
15/12/2017; 14:54
File: idt–1-idt305.tex; BOKCTP/xhs p. 7
Á. Török et al. / Towards a cognitive warning system for safer hybrid traffic
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
of the car, in reality steering wheel angle changes depends on the speed of the car too, also manufacturers
apply speed steering solutions in today’s cars [56].
Worthy to note, that the change of the steering wheel
angle is indicative of rather distant elements of the
perception-action cycle. Hence, presumably more benefit we earn from such a model when more proximal
cognitive variables are tracked. Eye and face tracking
in the cockpit could help detecting drowsiness very
early in time [21], but also – in situations like the
current experiment – could also help identifying saccades to certain stimuli inside and outside the car [8].
Wearable sensors can monitor heart rate, and therefore
can be used to inform traffic peers of medical emergency. Moreover, given the increasing availability of
consumer EEG headsets, it is promising that research
shows electrophysiological patterns can be extremely
helpful as well [22,23].
Another interesting field of exploration is the study
of information transmission and potentially further
propagation of data in a vehicle network [17,62,63].
This way the risk information is not only locally useful but can change the state of the global network. For
example, the network could start organizing detours
even when an inevitable accident has not happened
yet. On the one hand, creating such a one-directional
inter-cognitive link between an artificial and a biological cognitive system is an important step forward
from the perspective of the applied field of cognitive
infocommunications [31]. On the other hand though,
it raises important concerns regarding privacy and security. These systems would monitor the driver’s reactions and while communication is only intended in
case of risk, it is still a potential data breach. Moreover,
malicious attack is also possible against the automated
car by sending large amount of risk notifications. The
communication link therefore must be secured. Indeed,
current research on intelligent automated traffic, smart
cities and situation awareness of self-driving cars is
aware of these challenges [17,35,64,65].
Researchers working on self-driving cars say that
fully automated cars are still years or even decades
ahead [29,66]. Meanwhile, semi-automatic solutions
are increasingly available (automatic parking, highway
autopilot) [67,68]. Thus, roads are becoming more and
more a niche of biological and artificial drivers. In this
situation we may want artificial cognitive agents to coevolve with our biological cognitive systems. In the
present work we detailed one aspect of this endeavour, namely inter-cognitive warning systems. The core
of arguments was the importance of communication of
the human drivers’ cognitive and behavioural states to
self-driving cars to increase road safety in the future.
7
Acknowledgments
The research leading to these results has received
funding from the European Community’s Research
Infrastructure Action – grant agreement VISIONAIR
262044-under the 7th Framework Programme (FP7/
2007-2013). Á.T. was additionally supported by a
Young Researcher Fellowship from the Hungarian
Academy of Sciences. The authors would like to thank
László Kovács for his valuable comments on an earlier
version of this manuscript.
References
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
479
424
Google. Google Self-Driving Car Project. https://static.google
usercontent.com/media/, www.google.com/hu//selfdrivingcar
/.2016.
LaFrance A. When Google Self-Driving Cars Are in Accidents, Humans Are to Blame. Atl 2015.
Blanco M, Atwood J, Russell S, Trimble T, McClafferty
J, Perez M. Automated Vehicle Crash Rate Comparison
Using Naturalistic Data [Internet]. Vtti. Virginia Tech Transportation Institute; 2016. Available from: http://www.apps.
vtti.vt.edu/PDFs/Automated%5CnVehicle%5CnCrash%5Cn
Rate%5CnComparison%5CnUsing%5CnNaturalistic%5CnD
ata_Final%5CnReport_20160107.pdf%5Cn. http://www.vtti.
vt.edu/featured/?p=422.
Brumby DP, Salvucci DD, Howes A. Focus on driving. In:
Proceedings of the 27th international conference on Human
factors in computing systems – CHI 09 [Internet]. New York,
New York, USA: ACM Press; 2009 [cited 2 Nov 2014], 1629.
Available from: http://dl.acm.org/citation.cfm?id=1518701.
1518950.
Ho C, Spence C, Gray R. Looming auditory and vibrotactile collision warning for safe driving. In: 7th International
Driving Symposium on Human Factors in Driver Assessment, Training, and Vehicle Design [Internet]; 2013 [cited 2
Nov 2014]. Available from: http://trid.trb.org/view.aspx?id=
1263140.
Török Á, Tóth Z, Honbolygó F, Csépe V. Integration of
warning signals and signaled objects to a multimodal object:
A pilot study. In: 2013 IEEE 4th International Conference
on Cognitive Infocommunications (CogInfoCom) [Internet].
IEEE 2013 [cited 18 Sep 2014], 653-8. Available from: http:
//ieeexplore.ieee.org/articleDetails.jsp?arnumber=6719183.
Ho C, Reed N, Spence C. Multisensory in-car warning signals
for collision avoidance. Hum Factors [Internet]. Dec 2007
[cited 2 Oct 2013]; 49(6): 1107-14. Available from: http://
www.ncbi.nlm.nih.gov/pubmed/18074709.
Colonius H, Diederich A. The Multisensory Driver: Contributions from the Time-Window-of-Integration Model. In: Cacciabue PC, Hjãlmdahl M, Luedtke A, Riccioli C, eds. Human Modelling in Assisted Transportation SE – 39 [Internet]. Springer Milan 2011; 363-71. Available from: http://dx.
doi.org/10.1007/978-88-470-1821-1_39.
Koren C, Borsos A. Is Smeed’s law still valid? A world-wide
analysis of the trends in fatality rates. J Soc Transp Traffic
Stud 2013; 1(1): 64-76.
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
�Galley Proof
8
480
[10]
481
482
483
[11]
484
485
486
[12]
487
488
[13]
489
490
491
492
493
[14]
494
495
496
497
[15]
498
499
500
[16]
501
502
503
[17]
504
505
[18]
506
507
508
[19]
509
510
511
512
513
[20]
514
515
516
[21]
517
518
519
520
521
522
[22]
523
524
525
526
527
[23]
528
529
530
[24]
531
532
533
534
535
536
[25]
537
538
539
540
541
542
[26]
15/12/2017; 14:54
File: idt–1-idt305.tex; BOKCTP/xhs p. 8
Á. Török et al. / Towards a cognitive warning system for safer hybrid traffic
Mountain L, Fawaz B, Jarrett D. Accident prediction models for roads with minor junctions. Accid Anal Prev Elsevier
1996; 28(6): 695-707.
Abdel-Aty MA, Radwan AE. Modeling traffic accident occurrence and involvement. Accid Anal Prev Elsevier 2000; 32(5):
633-42.
Greibe P. Accident prediction models for urban roads. Accid
Anal Prev Elsevier 2003; 35(2): 273-85.
Oh JT, Yun I, Hwang JW, Han E. A comparative study on
accident prediction model using nonlinear regression and artificial neural network, structural equation for rural 4-legged
intersection. J Korean Soc Transp Korean Society of Transportation 2014; 32(3): 266-79.
Lu T, Dunyao Z, Lixin Y, Pan Z. The traffic accident hotspot
prediction: Based on the logistic regression method. In: Transportation Information and Safety (ICTIS), International Conference on IEEE 2015; 107-10.
Hu W, Xiao X, Xie D, Tan T. Traffic accident prediction using
vehicle tracking and trajectory analysis. In: Intelligent Transportation Systems, Proceedings IEEE 2003; 220-5.
Hu W, Xiao X, Xie D, Tan T, Maybank S. Traffic accident
prediction using 3-D model-based vehicle tracking. Veh Technol IEEE Trans IEEE 2004; 53(3): 677-94.
Jãmsã J, Sukuvaara T, Luimula M. Vehicle in a cognitive network. Intell Decis Technol IOS Press 2015; 9(1): 17-27.
Berger C, Rumpe B. Autonomous Driving – 5 years after the
urban challenge: The anticipatory vehicle as a cyber-physical
system. Proc Inform (September) 2012; 789-98.
Ji Q, Yang X. Real-Time Eye, Gaze, and Face Pose Tracking
for Monitoring Driver Vigilance. Real-Time Imaging [Internet]. Oct 2002 [cited Sep 17 2014]; 8(5): 357-77. Available
from: http://www.sciencedirect.com/science/article/pii/S1077
201402902792.
Peng J, Guo Y, Fu R, Yuan W, Wang C. Multi-parameter prediction of drivers’ lane-changing behaviour with neural network model. Appl Ergon Elsevier 2015; 50: 207-17.
Ueno H, Kaneda M, Tsukino M. Development of drowsiness
detection system. In: Proceedings of VNIS’94 – 1994 Vehicle
Navigation and Information Systems Conference [Internet].
IEEE 1994 [cited Sep 17 2014]; 15-20. Available from: http://
ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=3
96873.
Huang K-C, Huang T-Y, Chuang C-H, King J-T, Wang Y-K,
Lin C-T, et al. An EEG-Based Fatigue Detection and Mitigation System. Int J Neural Syst [Internet]. World Scientific
2016; 26(4): 1650018. Available from: http://www. worldscientific.com/doi/10.1142/S0129065716500180.
Wang H, Zhang C, Shi T, Wang F, Ma S. Real-time EEGbased detection of fatigue driving danger for accident prediction. Int J Neural Syst World Scientific 2015; 25(2): 1550002.
Suzuki K, Jansson H. An analysis of driver’s steering behaviour during auditory or haptic warnings for the designing
of lane departure warning system. JSAE Rev [Internet]. Jan
2003 [cited Sep 17 2014]; 24(1): 65-70. Available from:
http://www.sciencedirect.com/science/article/pii/S038943040
2002473.
Engström J, Johansson E, Östlund J. Effects of visual and
cognitive load in real and simulated motorway driving. Transp
Res Part F Traffic Psychol Behav [Internet]. Mar 2005 [cited
Jun 20 2015]; 8(2 SPEC ISS): 97-120. Available from: http:
//www.sciencedirect.com/science/article/pii/S136984780500
0185.
Hoehener D, Green PA, Del Vecchio D. Stochastic hybrid models for predicting the behavior of drivers facing
[27]
[28]
[29]
[30]
[31]
[32]
[33]
[34]
[35]
[36]
[37]
[38]
[39]
[40]
[41]
607
543
[42]
the yellow-light-dilemma. In: American Control Conference
(ACC), IEEE 2015; 3348-54.
Kozak K, Pohl J, Birk W, Greenberg J, Artz B, Blommer
M, et al. Evaluation of Lane Departure Warnings for Drowsy
Drivers. Proc Hum Factors Ergon Soc Annu Meet [Internet], SAGE Publications Oct 1 2006 [cited 18 Sep 2014];
50(22): 2400-4. Available from: http://pro.sagepub.com/cont
ent/50/22/2400.abstract.
Xu G, Liu L, Ou Y, Song Z. Dynamic modeling of driver
control strategy of lane-change behavior and trajectory planning for collision prediction dynamic modeling of driver control strategy of lane-change behavior and trajectory planning
for collision prediction. Intell Transp Syst IEEE Trans IEEE
2012; 13(September): 1138-55.
Waldrop MM. Autonomous vehicles: No drivers required. Nature [Internet], 2 Feb 2015 [cited 6 Feb 2015]; 518(7537): 203. Available from: http://www.nature.com/news/autonomousvehicles-no-drivers-required-1.16832?WT.ec_id=NATURE20150206.
Abe M. Vehicle Handling Dynamics: Theory and Application
[Internet]. Elsevier Science 2015 [cited May 28 2016]; 322.
Available from: https://books.google.com/books?id=yOzHB
QAAQBAJ&pgis=1.
Baranyi P, Csapó Á. Definition and synergies of cognitive infocommunications. Acta Polytech Hungarica 2012; 9(1): 6783.
Baranyi P, Csapo A, Sallai G. Cognitive infocommunications (CogInfoCom). Cognitive Infocommunications (CogInfoCom) Springer 2015; 1-219.
Miletics D. Human decisions at irregular overtakings. In:
Cognitive Infocommunications (CogInfoCom), 2015 6th
IEEE International Conference on IEEE 2015; 145-9.
Chen D, Ahn S, Laval J, Zheng Z. On the periodicity of traffic
oscillations and capacity drop: The role of driver characteristics. Transp Res part B Methodol Pergamon 2014; 59: 117-36.
Jãmsã J. Cognitive communication for traffic safety. In: 5th
IEEE International Conference on Cognitive Infocommunications, CogInfoCom – Proceedings IEEE 2014; 103-8.
Sepulcre M, Gozalvez J, Hernandez J. Cooperative vehicleto-vehicle active safety testing under challenging conditions.
Transp Res Part C Emerg Technol [Internet], Jan 2013 [cited
Sep 17 2014]; 26: 233-55. Available from: http://www.science
direct.com/science/article/pii/S0968090X12001258.
Heikkilã M, Kippola T, Jãmsã J, Nykãnen A, Matinmikko M,
Keskimaula J. Active antenna system for cognitive network
enhancement. 5th IEEE Int Conf Cogn Infocommunications,
CogInfoCom – Proc IEEE 2014; 19-24.
Politis I, Brewster SA, Pollick F. Evaluating multimodal
driver displays under varying situational urgency. In: Proceedings of the 32nd Annual ACM Conference on Human Factors
in Computing Systems – CHI ’14 [Internet]. New York, New
York, USA: ACM Press, 2014 [cited 15 Oct 2014]; 4067-76.
Available from: http://dl.acm.org/citation.cfm?id=2611222.2
556988.
Jãmsã J, Pieskã S, Luimula M. Situation awareness in cognitive transportation systems. Spec Issue Cogn Infocommunications Infocommun J 2013; 5(4): 10-6.
Kling F, Török Á, Mestre D, Pergandi J-M, Mallet P, Honbolygó F, et al. Effectiveness of warning signals in dual-task
driving scenarios. In: Cognitive Science Arena III 2015.
Hearst MA, Dumais ST, Osman E, Platt J, Scholkopf B. Support vector machines. Intell Syst their Appl IEEE 1998; 13(4):
18-28.
Aizerman A, Braverman EM, Rozoner LI. Theoretical foun-
544
545
546
547
548
549
550
551
552
553
554
555
556
557
558
559
560
561
562
563
564
565
566
567
568
569
570
571
572
573
574
575
576
577
578
579
580
581
582
583
584
585
586
587
588
589
590
591
592
593
594
595
596
597
598
599
600
601
602
603
604
605
606
�Galley Proof
15/12/2017; 14:54
File: idt–1-idt305.tex; BOKCTP/xhs p. 9
Á. Török et al. / Towards a cognitive warning system for safer hybrid traffic
608
609
610
[43]
611
612
[44]
613
614
615
616
[45]
617
618
619
620
621
[46]
622
623
624
625
626
627
[47]
628
629
630
631
632
633
634
[48]
635
636
[49]
637
638
[50]
639
640
641
[51]
642
643
[52]
644
645
646
[53]
647
648
649
[54]
650
651
[55]
dations of the potential function method in pattern recognition
learning. Autom Remote Control 1964; 25: 821-37.
Cortes C, Vapnik V. Support-vector networks. Mach Learn
Springer 1995; 20(3): 273-97.
Michel P, El Kaliouby R. Real time facial expression recognition in video using support vector machines. In: Proceedings
of the 5th international conference on Multimodal interfaces
ACM 2003; 258-64.
Erfani SM, Rajasegarar S, Karunasekera S, Leckie C. Highdimensional and large-scale anomaly detection using a linear
one-class SVM with deep learning. Pattern Recognit [Internet]. Oct 2016; 58: 121-34. Available from: http://www. sciencedirect.com/science/article/pii/S0031320316300267.
Steenken R, Weber L, Colonius H, Diederich A. Designing
driver assistance systems with crossmodal signals: Multisensory integration rules for saccadic reaction times apply. PLoS
One [Internet]. Public Library of Science; May 6 2014; 9(5):
e92666. Available from: http://dx.doi.org/10.1371%2Fjournal
.pone.0092666.
Cruz-Neira C, Sandin DJ, DeFanti TA. Surround-screen
projection-based virtual reality. In: Proceedings of the 20th
Annual Conference on Computer Graphics and Interactive
Techniques – SIGGRAPH ’93 [Internet]. New York, New
York, USA: ACM Press 1993 [cited Mar 16 2015]; 135-42.
Available from: http://dl.acm.org/citation.cfm?id=166117.16
6134.
Van Rossum G. Python Programming Language. In: USENIX
Annual Technical Conference 2007.
McKinney W. Pandas: A Python data analysis library. 2012;
551. Online URL http://pandas.
Pedregosa F, Varoquaux G, Gramfort A, Michel V, Thirion
B, Grisel O, et al. Scikit-learn: Machine learning in Python. J
Mach Learn Res JMLR.org 2011; 12: 2825-30.
Hunter JD. Matplotlib: A 2D graphics environment. Comput
Sci Eng 2007; 9(3): 90-5.
Schölkopf B, Williamson RC, Smola AJ, Shawe-Taylor J,
Platt JC. Support vector method for novelty detection. NIPS
1999; 12: 582-8.
Schölkopf B, Smola AJ. Learning with kernels: Support vector machines, regularization, optimization, and beyond. MIT
Press 2002.
Joachims T. Making large scale SVM learning practical. Universitãt Dortmund, 1999.
Van der Maaten L, Hinton G. Visualizing data using t-SNE. J
Mach Learn Res 2008; 9(2579–2605): 85.
[56]
[57]
[58]
[59]
[60]
[61]
[62]
[63]
[64]
[65]
[66]
[67]
[68]
652
9
Minh VT. Vehicle steering dynamic calculation and simulation. Proc 23rd Symp DAAAM Int Vienna 2012; 237-42.
Andrzejewski R, Awrejcewicz J. Nonlinear dynamics of a
wheeled vehicle. Vol. 10. Springer Science & Business Media, 2006.
Huang YH, Erdogmus D, Pavel M, Mathan S, Hild KE. A
framework for rapid visual image search using single-trial
brain evoked responses. Neurocomputing 2011; 74(12–13):
2041-51.
Hassan AH, Lambert-Lacroix S, Pasqualini F. Real-time fault
detection in semiconductor using one-class support vector
machines. Int J Comput Theory Eng IACSIT Press 2015; 7(3):
191.
Cotter A, Shalev-Shwartz S, Srebro N. Learning optimally
sparse support vector machines. In: ICML 2013; 266-74.
Lloyd D. In Touch with the Future: The Sense of Touch from
Cognitive Neuroscience to Virtual Reality. Presence Teleoperators Virtual Environ [Internet]. The MIT Press; Aug 4 2014
[cited Sep 10 2014]; 23(2): 226-7. Available from: http://ww
w.mitpressjournals.org/doi/abs/10.1162/PRES_r_00182?jour
nalCode=pres#.VBAm2vl_uMg.
Karsai M, Kivelã M, Pan RK, Kaski K, Kertész J, Barabási
A-L, et al. Small but slow world: How network topology
and burstiness slow down spreading. Phys Rev E APS 2011;
83(2): 25102.
Wang P, González MC, Hidalgo CA, Barabási A-L. Understanding the spreading patterns of mobile phone viruses. Science, American Association for the Advancement of Science
2009; 324(5930): 1071-6.
Gerla M, Lee E-K, Pau G, Lee U. Internet of vehicles: From
intelligent grid to autonomous cars and vehicular clouds. In:
Internet of Things (WF-IoT), IEEE World Forum on 2014;
241-6.
Hubaux J-P, Capkun S, Luo J. The security and privacy
of smart vehicles. IEEE Secur Priv Mag 2004; 2(LCAARTICLE-2004-007): 49-55.
Urmson C. Google Self-Driving Car Project. SXSW Interactive 2016. https://www.youtube.com/watch?v=Uj-rK8V-rik.
Koo J, Kwac J, Ju W, Steinert M, Leifer L, Nass C. Why did
my car just do that? Explaining semi-autonomous driving actions to improve driver understanding, trust, and performance.
Int J Interact Des Manuf Springer 2015; 9(4): 269-75.
Mok BK-J, Johns M, Lee KJ, Ive HP, Miller D, Ju W. Timing
of unstructured transitions of control in automated driving. In:
Intelligent Vehicles Symposium (IV), IEEE 2015; 1167-72.
653
654
655
656
657
658
659
660
661
662
663
664
665
666
667
668
669
670
671
672
673
674
675
676
677
678
679
680
681
682
683
684
685
686
687
688
689
690
691
692
693
694
695
696
697
�
 Daniel Mestre
Daniel Mestre