Planning Pick-and-Place tasks with two-hand regrasping
Jean-Philippe Saut1,2 , Mokhtar Gharbi1,2 , Juan Cortés1,2 , Daniel Sidobre1,2 , Thierry Siméon1,2
{jpsaut, mgharbi, jcortes, daniel, nic}@laas.fr
1
CNRS ; LAAS ; 7 avenue du colonel Roche, F-31077 Toulouse, France
2
Université de Toulouse; UPS, INSA, INP, ISAE ; LAAS ; F-31077 Toulouse, France
Abstract— This paper proposes a planning framework to
deal with the problem of computing the motion of a robot
with dual arm/hand, during an object pick-and-place task. We
consider the situation where the start and goal configurations
of the object constrain the robot to grasp the object with
one hand, to give it to the other hand, before placing it in
its final configuration. To realize such a task, the proposed
framework treats the grasp computation, for one or two multifingered hands, of an arbitrarily-shaped object, the exchange
configuration and finally the motion of the robot arms and
body. In order to improve the planner performance, a contextindependent grasp list is computed offline for each hand and for
the given object as well as computed offline roadmap that will be
adapted according to the environment composition. Simulation
results show the planner performance on a complex scenario.
I. I NTRODUCTION
While humanoid torso robots offer better manipulation
capacities compared to single arm/hand robots, they also
introduce new issues. For instance, in the case of a twoarm robot, if the object start and goal configurations are not
within the workspace of the same arm, it is necessary to
change the grasping hand to achieve the task. An efficient
and elegant way to change the grasp is to plan a dual-hand
grasp of the object.
Among the earlier work on this topic, [1] proposed a
practical planner for arms manipulating an object using a
predefined set of grasps. More recent work addressed a
similar problem for the case of dual-arm manipulation with
regrasping for a humanoid robot [2].
This paper describes a practical framework to resolve the
pick-and-place problems with a humanoid robot in scenarios
such as the one illustrated in Fig. 1. DLR’s robot Justin
[3] equipped with two multi-fingered hands has to pick the
horse statuette from its right side and place it at its left. The
pick-and-place problem is then defined by the initial and
final configurations of the robot and of the object. The idea
developed in this work is to use several offline computed data
structures such as grasp list and robot roadmap to reduce the
online planning time. First, a scored grasp list is generated
for each hand, using the method presented in Section IVA. Also, a roadmap is preprocessed using the coordination
roadmap approach [4] described in Section V-A, that does
not account for the manipulated object. To resolve a specific
pick-and-place task (online planning), a list of collision-free
This work has been supported by the European Community’s Seventh
Framework Program FP7/2007-2013 “DEXMART” under grant agreement
no. 216239. This work was also supported by the ANR project ASSIST.
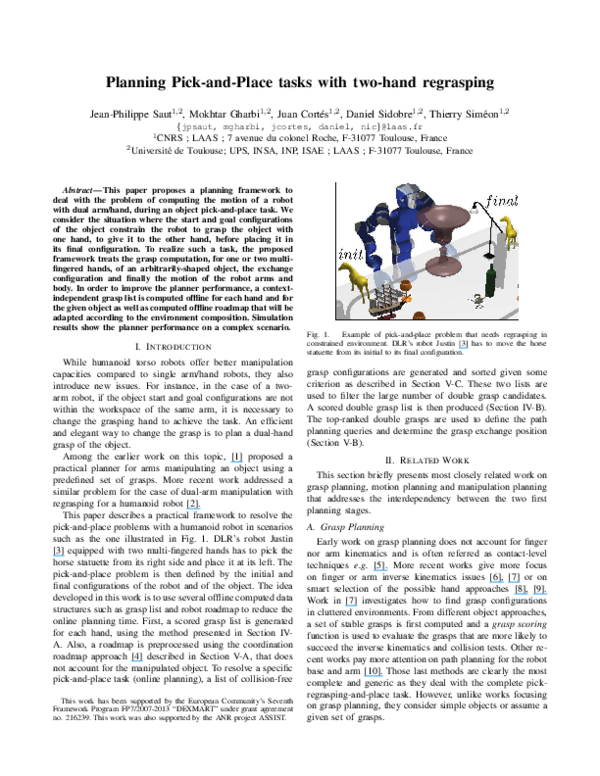
Fig. 1.
Example of pick-and-place problem that needs regrasping in
constrained environment. DLR’s robot Justin [3] has to move the horse
statuette from its initial to its final configuration.
grasp configurations are generated and sorted given some
criterion as described in Section V-C. These two lists are
used to filter the large number of double grasp candidates.
A scored double grasp list is then produced (Section IV-B).
The top-ranked double grasps are used to define the path
planning queries and determine the grasp exchange position
(Section V-B).
II. R ELATED W ORK
This section briefly presents most closely related work on
grasp planning, motion planning and manipulation planning
that addresses the interdependency between the two first
planning stages.
A. Grasp Planning
Early work on grasp planning does not account for finger
nor arm kinematics and is often referred as contact-level
techniques e.g. [5]. More recent works give more focus
on finger or arm inverse kinematics issues [6], [7] or on
smart selection of the possible hand approaches [8], [9].
Work in [7] investigates how to find grasp configurations
in cluttered environments. From different object approaches,
a set of stable grasps is first computed and a grasp scoring
function is used to evaluate the grasps that are more likely to
succeed the inverse kinematics and collision tests. Other recent works pay more attention on path planning for the robot
base and arm [10]. Those last methods are clearly the most
complete and generic as they deal with the complete pickregrasping-and-place task. However, unlike works focusing
on grasp planning, they consider simple objects or assume a
given set of grasps.
�Our planner includes a generic grasp planner for multifingered hands and determines a set of single grasps that can
be used to find an exchange double grasp, even in a cluttered
environments and for an object with a complex shape.
B. Motion Planning
Sampling-based planners are able today to solve complex problems in high-dimensional spaces. In particular,
the probalistic methods like PRM, introduced in [11], and
RRT [12] have been shown to perform well for a broad
class of problems, even if their performance degrades in the
presence of narrow passages. Many variants and extensions
have been proposed to alleviate this problem (see [13] for
a survey). Our planner is based on recent work [4], that
proposes a roadmap coordination approach for multi-arm
systems.
C. Manipulation Planning
One of the challenging issues of manipulation planning is
to integrate the additional difficulty of planning the grasping
and re-grasping operations to the path planning problem.
This interdependency between path and grasp planning was
first touched in early work on automatic robot programming
systems (e.g. [14]). The manipulation planning approach
in [15] provided a unified framework allowing to better tackle
the interdependency issues between both planning levels.
More recently, the BiSpace, algorithm [10] was proposed
to plan how to go and grasp an object. The idea is to
first compute a set of grasp configurations for the hand
alone. Once one or more collision-free configurations for
the hand are found, they become the start nodes of several
RRT trees [12], that explore the hand workspace, while
another RRT is grown from the robot start configuration,
that explores the robot configuration space (CS).
Our work also considers a particular instance of manipulation planning problem and focuses on the combination of
efficient grasp and motion synthesis techniques to solve a
pick-and-place task requiring two-hand regrasping.
III. P ROBLEM F ORMULATION AND A PPROACH
The studied system is composed of a dual-arm robot, with
a hand mounted on each arm, an object and a set of static
obstacles. The problem inputs are the initial and final (goal)
configurations of the robot (qri and qrf ) and of the object
(qoi and qof ). qoi and qof correspond to stable placements of
the object on a support. qoi is such that the object is only
reachable with one of the arm, referred as Arm1 . qof is such
that the object is only reachable with the other arm, referred
as Arm2 . The robot will thus have to exchange the object
between its two hands. The exchange configuration is qoe for
the object, qre for the whole robot (torso plus arms). The
robot will grasp the object in qoi with configuration qrg and
will place it in qof with configuration qrp .
The method proposed in this paper for planning pickand-place tasks relies on two sub-task planners: The Grasp
planner presented in next section and the path planner
presented in Section V.
Fig. 2. The object mesh is uniformly sampled with a point set and then
partitioned using a kd-tree.
IV. G RASP P LANNING
Grasp planning basically consists in finding a configuration for the hand(s) or end effector(s) that will allow to pick
up the object. In the present context, we are interested in
two kinds of grasps: One-handed grasps (or single grasps)
and two-handed grasps (or double grasps). We consider only
precision grasps i.e. contacts are made with fingertips only.
This allows to reason with point contact only, that is the
most common case in literature. It also gives more grasping
possibilities as smaller parts can be grasped, at the cost
of a weaker stability compared to power grasps. We have
implemented our algorithm for the Schunk Anthropomorphic
hand (SAH hand, depicted on Fig. 3). Our method is not
specific to this hand but we will use it for illustration purpose.
The first stage of our grasp planner consists in building a
grasp list to capture the variety of the possible grasps.
A. Single Grasp Planning
A single grasp is defined for a specific hand type and for
a specific object. It is defined by:
• A grasp frame, i.e. a relative pose of the hand reference
frame (e.g. palm or wrist frame) wrt. the object frame.
• A set of contact points (a point on the object surface
and the ID of the finger realizing the contact).
• A hand configuration (finger joint parameters).
As our main concern is motion planning, it is not possible
to rely on the computation of an only grasp or on a heuristic
that could introduce a bias on the choice of the grasp. It is
preferable to compute a grasp list that aims to reflect the best
the variety of all possible grasps of the object. Our algorithm
applies the following steps that will be detailed further:
• Build a set of grasp frame samples.
• Compute a list of grasps from the set of grasp frames.
• Perform a stability filter step and compute a quality
score for each grasp.
1) Grasp frame sampling: To avoid biasing the possible
approach of the hand when we compute the grasp, we choose
to uniformly sample the possible grasp frames, by the mean
of a grid. We have chosen a grasp frame that is centered on
the intersection of the finger workspaces so that it is roughly
centered where the contacts may occur. We set as an input
the numbers of positions and orientations, each pair positionorientation defining a frame. The positions are uniformly
sampled in the object axis-aligned bounding box with a step
computed to fit the desired number of position samples. The
orientations are computed with an incremental grid as in [16].
For each grasp frame, a set of grasps will be computed.
�2) Grasp list computation: As the proposed grasp planning method does not restrict the possible hand poses or
contact surface on the object, it requires a lot of computation.
Therefore, we have to introduce some data structures to
reduce the computation times. Except for collision test, the
most expensive computation is the finger inverse kinematics.
One has to be able to know the fastest possible if, for a
given hand pose (relative to the object), a finger can establish
a contact on the object surface and, if it can, where. The
contacts can only occur in the intersection of the finger
workspace and the object surface. For each finger, it is
consequently crucial to find this intersection or at least an
approximation. We propose to approximate the object surface
with a point set. The set is obtained by a uniform sampling
of the object surface. The sampling step magnitude is chosen
from the fingertip radii. A kd-tree is built upon the point set
in order to have a hierarchical space partition of the points
(Fig. 2).
We then need to find the intersection of each finger
workspace with the object kd-tree. As spheres are invariant
in rotation, they are interesting to build an approximation
of the finger workspace. Starting from grid approximations
of the finger workspace’s interior volume W and envelope
E (Fig. 3), we build incrementally a set of spheres fitting
inside the workspace using Algorithm 1. The interior volume
grid is obtained by sampling the three joint angles over
their respective ranges. The envelope grid is obtained by
blocking one of the joint angle to its limit values (lower
then upper) and sampling the two others. By construction, the
sphere hierarchy starts from the biggest ones, corresponding
to workspace parts that are the farthest to the finger joint
bounds.
Algorithm 1: Finger workspace approximation
: W = a set of points strictly inside the finger
workspace ; E= a set of points on the envelope of the finger workspace ; kmax = the
desired maximal number of spheres ; rmin =
the desired minimal sphere radius ;
output : S= a set of spheres Sk
S=∅;k=1;
while k < kmax do
foreach p ∈ W do
d(p) = min (kp − pi k) ;
input
pi ∈(E∪S)
pbest = {p ∈ W : d(p) = max (d(pi ))};
Once we have both the kd-tree and the sphere hierarchy,
it is very fast to determine the intersection of the two sets
and so the contact points. The intersection is tested from the
biggest to the smallest sphere, guarantying that the “best”
parts of the workspace will be tested first, i.e. the one farthest
to workspace singularities, due to the joint bounds. For a
given grasp frame, the grasp is computed finger by finger, i.e.,
if we have the contact and configurations of the fingers 1 to
i − 1, we search a contact point for finger i and test collision
only with fingers 1 to i as the other finger configurations are
not yet known. We start from the thumb as no stable grasp
can be obtained without it. If a finger can not establish a
contact, it is left in a “rest” (stretched) configuration. if we
have three contacts or more, we can proceed to the stability
test. Note that, at this stage, we have a collision-free grasp
i.e. no collision between the hand and the object and do not
yet consider collision with the environment or the robot arms
or body.
3) Stability filter and quality score: The stability test
is based on a point contact with friction model. From the
contact positions and normals, we compute a force-closure
stability score [17]. All the grasps that do not verify forceclosure are discarded. The stability score is not sufficient to
discriminate good grasps so we build a more general quality
score. Several aspects can be taken into account to compute a
grasp quality measure [18]. A tradeoff is often chosen with a
score that is a weighted sum of several measures. We used the
following scores: the above force-closure score, the distance
from the contact centroid to the mass center of the object,
the sum of the angles between each contact normal and the
force ellipsoid major axis of the associate finger, the sum of
the object’s surface inverse curvature at the contact points.
The curvatures are normalized over all the values on the
sampled object’s surface. The weights were set manually.We
found that (1.0, 1.0, 1.0, 6.0 (curvature score)) offers a
good trade-off even though it might not always be the case.
Combining different quality scores remains however a hard
problem, beyond the scope of this paper.
B. Double Grasp Planning
A double grasp is a grasp involving both hands. It is
computed from two single grasp lists L1 and L2 , obtained
for each hand. Each single grasp pair sg1 and sg2 , belonging
to L1 and L2 respectively, is tested. All colliding pairs are
rejected. To avoid an excessive number of pairs to test, we
first filter L1 and L2 to remove all the grasps that lead to a
collision with the environment for the given initial and final
pi ∈W
Sk = sphere(center = pbest , radius = d(pbest )) ;
S = S ∪ Sk ;
W = W − {p ∈ W : p ⊂ Sk } ;
k =k+1 ;
if d(pbest ) < rmin then
break ;
return S ;
Fig. 3. The finger workspace discretized with a grid (forefinger workspace,
left image). The grid is converted to a volumetric approximation as a set of
spheres (right image).
�Fig. 4. The decomposition of the humanoid system into elementary parts.
The two arms and the head are the “independent” parts and the torso is the
“common” one.
object poses. For instance, all the grasps that take the object
from “below” will be removed as they lead to a collision
between the object support and the hand. For each double
grasp, a score is then computed based on two scores: the
quality of each single grasp and a robot configuration score.
• The minimum of sg1 and sg2 quality is used as a the
first score for the double grasp.
• A robot configuration score is computed for sg1 and
sg2 , based on how “natural” is the way to grasp the
object in its start and goal configuration using sg1 and
sg2 . For the double grasp, we take the minimum of the
robot configuration scores of sg1 and sg2 .
After normalizing these two scores separately for all the
computed double grasps, we sum them for each double grasp
to obtain its score.
V. PATH PLANNING
A. Offline roadmap
Computing an offline roadmap is suitable to speed up the
task resolution. This roadmap is computed using specially
designed one for multi-arm systems [4]. During this generation, only self-collisions and collisions against static objects
are considered while ignoring the object to move. The multiarm systems roadmap composition algorithm [4] is a suitable
method to efficiently plan multi-arm systems motions in
constrained workspaces. It is based on the decomposition
of the system into kinematically independent parts, which
are treated as individual robots in a multi-robot roadmap
composition approach. Fig. 4 illustrates the different parts
of Justin. Each arm is independent from the other. If the
value of an arm joint is modified, the change does not affect
the position of any other part in the system. However, a
change in one of the torso joints modifies the pose of the
arms and the head. In general case, a part is said to be
independent, if the change of its configuration does not affect
the pose of other system parts. Thus, this system involves
three independent parts P I : the right and the left arms (PrI
and PlI respectively), and the head (PhI ); and a common
one: the torso (PtC ). Given the relatively low mobility of the
head, it can be considered together with the torso in order
to simplify the system decomposition.
This decomposition permits to split the roadmap construction into two stages. The first stage is to compute two
collision-free roadmaps Rr and Rl for the two sub-systems
composed by the torso and the right and left arms respectively. Such roadmaps construction considers self-collisions
of the sub-system and collisions with the obstacles in the
Fig. 5. On the left, a representation of elementary roadmaps computed
for the presented system (circle and square). The generated Super Graph
on the right.
workspace. Any PRM-like method can be used to generate
these roadmaps. However, the use of methods generating
compact roadmaps such as [19] or [20] is preferable in order
to limit the size of the composite roadmap, which is defined
as the Cartesian product of all the sub-system roadmaps, and
whose size may become huge if standard PRM methods are
used.
The constructed roadmaps are then merged into a composite one, called Super Graph (SG), extending the idea initially
proposed in [21] for the case of multiple car-like robots.
Merging two nodes from Rr and Rl creates SG node. The
SG nodes are connected via SG edges. Fig. 5 illustrates the
principle of the SG construction. Creation of nodes and edges
are explained below.
1) Super Graph Nodes: The SG nodes are created by
the composition of elementary nodes xr and xl , in Rr and
Rl respectively. Due to change of common configuration
parameters in xr and xl , merging consists of creating two
SG nodes, obtained by fusing configurations of the independent parts. Each SG node is only partially checked for
self-collision, since nodes of the elementary roadmaps are
collision-free with the environment. Each independent part
configuration added up to an elementary node has been
checked against the other independent parts, the common
parts, and the workspace obstacles. Only the collision-free
nodes are kept in SG.
2) Super Graph Edges: Once a node X is created and
inserted into SG, its connection to the other SG nodes Y is
computed. In order to preserve the efficiency of the roadmap
construction, a filter, based on the information given by the
elementary nodes, only considers connections between two
SG nodes X and Y if their composing nodes, xr and yr , and
xl and yl are connected in Rr and Rl respectively. Another
possible strategy for saving computing time is to construct a
roadmap tree instead of a graph. In this case, connection tests
(using a local planner) are only performed between SG nodes
belonging to different connected component of SG. Like
for the SG nodes, validating SG edges only requires to
test collisions between pairs of parts and with workspace
obstacles that have not been checked when computing the
edges of the elementary roadmaps. A SG edge is added to
the SG if it is collision-free.
B. Online planning
We explain below how robot motions are computed online
in order to realize the pick, regrasp and place task, given the
precomputed single / double grasps and roadmap. The task
can be decomposed into four consecutive steps:
�Grasp the object (from qri to qrg )
g
e
• Carry it to the exchange position (from qr to qr )
p
e
• Place it (from qr to qr )
f
p
• Goto rest configuration (from qr to qr )
with qri and qrf given as input and the three other configurations (qrg , qre and qrp ) are generated by the planner.
Once the grasp configurations have been generated (Section V-C), the path planner executes the four previously
presented queries sequentially. To obtain collision-free paths,
the previously computed roadmap has to take into account
the manipulated object. In fact, by adding an object in the
robot working space, the collision-free CS of the robot
changes. The CS also changes when the robot carries the
object. Revalidating online the entire roadmap would be too
costly. We use instead a lazy node and edge revalidation as
in [22].
First the query is executed in the precomputed roadmap
disregarding the collisions of the existing nodes and edges
in the graph. Once a path is found, each local path composing it is checked for collision against the manipulated
object that is not considered in the preprocessed roadmap.
If a collision is detected for some local paths, replanning
strategy is performed as follows. First, the collision-free
configurations bounding the collision portion are determined.
An alternative path between the disconnected configurations
is then searched in the precomputed graph. If no solution
is found, local reconnections are computed using RRT-like
planners [12]. The path is iteratively modified until all its
local paths are collision-free. Our implementation uses the
same data structure for storing PRM roadmaps and RRT
diffusion trees. Then, it is easy to enrich a graph computed
using PRMs with RRTs to efficiently reconnect the disconnected components in the graph.
•
C. Grasp Configuration
The grasp and place configurations of the robot are simply
derived from the object initial and final placement qoi and qof
provided as input. However, the exchange configuration qoe
of the object is unknown. The object position is determined
by minimizing wrist motions to perform the task. The minimization is done on a 3D grid. The object exchange position
is the collision-free grid node that minimizes the length sum
of the edges depicted on Fig. 6, in 3D space. Once a position
i
Arm 1
VI. R ESULTS
To evaluate the performance of the planner, we propose to
plan a pick-and-place task with Justin [3], equipped with two
SAH hands (Fig. 1). Justin is composed of a 3-DoFs torso,
two 7-DoFs DLR-Lightweight-Robot-III arms, and a 2-DoFs
head. The SAH hands are composed of four 3-DoFs fingers
plus a movable thumb base. Disregarding the neck joints,
which are considered to be fixed in our experiments, Justin
involves 43-DoFs. The object to work with is a highly nonconvex body with several parts (a horse statuette, whose 3D
model (widely used in CG community) has been simplified
to 672 vertices and 1334 triangles).
In this task, Justin has to pick the object at his right
and place it behind the desk lamp at his left. The legged
lamp and the vase constrain the robot motions and the
exchange configuration. As the single grasp generation is
i
Arm 2
e
Arm 1-2
f
g
Arm 1
is selected, the object is tested against the static obstacles in
predetermined orientations to ensure a collision-free object
exchange. Unlike object exchange position, the orientation is
determined by the selected double grasp directions and the
object position wrt. the robot torso.
The grasp, place and exchange configurations are generated in nearly the same way. All robot joints are sampled
except the arm(s) grasping the object (one arm for grasp and
place configurations and both for exchange configuration),
that are computed using the inverse kinematics characterized
by the grasps and the object position. Then, a collision test
is performed on the generated configuration. For exchange
configuration, the object configuration is sampled following
a Gaussian distribution centered on the theoretical best qoe
previously computed.
The robot grasp configuration score used in the double
grasp scoring formula, takes into account grasping and freearm configurations. The grasping arm score is determined
with cosine of the angle between the selected grasp and the
object robot-base directions. This will give a bad score for
grasps whose direction is far from the object-(robot base)
axis. The free-arm score is added to favor “natural” robot
configurations. This score is composed of the joint distance
between the sampled arm configuration and a user defined
rest configuration of the arm. It is also composed by the
height difference between the sampled and rest configurations, and the distance between the arm wrist and the plane
composed by the robot’s torso and shoulders.
Arm 1
f
Arm 2
p
Arm 2
Fig. 6. Top view of a pick-and-place task showing the elementary distances
to be minimized over a 3D grid in order to compute the double grasp
position (the center red circle). Superscripts corresponds to the different
key-configurations of the arms ([i=initial, f=final, g=grasping, e=exchange,
p=placement]-configuration).
Fig. 7. Example of computed exchange positions for different initial (red)
and final (green) object poses, taking into account the cost to minimize and
obstacle collision avoidance.
�TABLE I
N UMERICAL R ESULTS
Problem
Online Planning
Path Validation
Total
Grasp
n
T (s)
65
2.7
3
0.3
68
3
n
53
18
71
Carry
T (s)
2.6
1.5
4.1
n
32
12
44
Place
T (s)
1.2
1.1
2.3
n
49
3
51
Rest
T (s)
1.9
0.3
2.1
a deterministic and workspace independent operation, the
same single grasps lists (one for each hand) are used for all
tests. Right grasp list contains 17 valid grasps and 22 for left
list, each one computed in about 1 minute1 . In the presented
scenario, given the single grasp lists, the planner generates 4
(right) and 7 (left) collision-free single grasps configurations
in 4.2 seconds, and 4 double-grasp configurations in 2.6
seconds. Fig. 7 shows two examples of computed double
grasps, used for regrasping. They are computed for the same
object but for different initial and final object poses. The
computed exchange configuration brings the object near the
robot torso, leading to a motion that looks more “natural”
than a simple straight line linking initial and final poses.
Table I reports the numerical results (n= node number,
T = computation time) obtained for the presented pick-andplace planner, following the task decomposition presented
in Section V-B. The offline roadmap is computed in about
5 minutes and contains near 1700 nodes. The nodes are
produced by merging two elementary roadmaps generated
using Vis-PRM algorithm [19], each one containing 50
nodes. Using this offline roadmap, our planner solves the
entire task in 11.6 seconds. Comparatively, by putting a
single query planner [12], one needs 35 seconds to solve the
same problem. These two last results do not include the time
needed to compute single and double grasps configurations.
Table I also shows that the time consumed in path validation for Carry and Place phases is more important than
for the two other planning phases. This is due to the bigger
change of the robot CS, induced by considering the object as
a robot’s body instead of just a static obstacle. However, the
time needed to plan (without revalidation) Grasp and Rest
phases are higher because of the highly constrained grasp
and place configurations.
VII. C ONCLUSION AND F UTURE W ORK
We have presented a planner that can automatically compute the motion of a dual-arm/hand robot during a pick-andplace task requiring an object exchange between the hands.
The planner computes as well all the necessary intermediate
configurations. The integration of several offline computed
and reusable data structures such as grasp lists and arm
roadmaps, allows the planner to significantly reduce its
computation times compared to the use of simple singlequery techniques. Simulation results show the efficiency of
the planner for solving a difficult manipulation task involving
a humanoid robot equipped with two redundant arms and two
1 All numerical results in the paper have been averaged over 20 runs of
the planner. Computing time corresponds to a Dual-Core AMD Opteron
processor 2222 at 3.0 GHz
multi-fingered hand, a complex-shaped object and a cluttered
environment.
In some situations, no solution may be found by the
planner because the initial pose of the object constrains too
much the choice of the single grasp used to pick the object
up, that in turn constrains the choice of the exchange double
grasp, constraining in turn the choice of the single grasp used
to place the object in its final configuration. To treat such a
case, one or more intermediate placements are mandatory. A
more complex version of our planner could try to integrate
such notions.
R EFERENCES
[1] Y. Koga and J.-C. Latombe, “On multi-arm manipulation planning,”
IEEE Conf. on Rob & Autom., vol. 2, pp. 945–952, 1994.
[2] N. Vahrenkamp and et al., “Humanoid motion planning for dualarm manipulation and re-grasping tasks,” in IEEE/RSJ Int. Conf. on
Intelligent Robots & Systems, October 2009.
[3] C. Ott and et al., “A humanoid two-arm system for dexterous manipulation,” in IEEE-RAS Int. Conf. on Humanoid Robots, 2006.
[4] M. Gharbi, J. Cortés, and T. Siméon, “Roadmap composition for multiarm systems path planning,” in IEEE/RSJ Int. Conf. on Intelligent
Robots & Systems, Oct. 2009, pp. 2471–2476.
[5] V.-D. Nguyen, “Constructing force-closure grasps,” IEEE Conf. on
Rob. & Autom., vol. 3, pp. 1368–1373, Apr 1986.
[6] Z. Xue, J. Marius Zoellner, and R. Dillmann, “Grasp planning: Find
the contact points,” IEEE Int. Conf. on Robotics and Biomimetics, pp.
835–840, Dec. 2007.
[7] D. Berenson, R. Diankov, K. Nishiwaki, S. Kagami, and J. Kuffner,
“Grasp planning in complex scenes,” in IEEE-RAS International
Conference on Humanoid Robots (Humanoids07), December 2007.
[8] A. Miller, S. Knoop, H. Christensen, and P. Allen, “Automatic grasp
planning using shape primitives,” IEEE Conf. on Rob. & Autom., vol. 2,
pp. 1824–1829 vol.2, Sept. 2003.
[9] K. Huebner, S. Ruthotto, and D. Kragic, “Minimum volume bounding
box decomposition for shape approximation in robot grasping,” IEEE
Conf. on Rob. & Autom., pp. 1628–1633, May 2008.
[10] R. Diankov, N. Ratliff, D. Ferguson, S. Srinivasa, and J. Kuffner,
“Bispace planning: Concurrent multi-space exploration,” in Robotics:
Science and Systems, vol. IV, Zurich, Switzerland, June 2008.
[11] L. E. Kavraki, P. Svestka, J.-C. Latombe, and M. H. Overmars, “Probabilistic roadmaps for path planning in high-dimensional configuration
spaces,” IEEE Trans. on Rob. & Autom., vol. 12(4), pp. 566–580, 1996.
[12] S. M. LaValle and J. J. Kuffner, “Rapidly-exploring random trees:
Progress and prospects,” in Proceedings of Workshop on the Algorithmic Foundations of Robotics, 2000.
[13] S. M. LaValle, Planning Algorithms. New York: Cambridge University Press, 2006.
[14] T. Lozano-Pérez, J. L. Jones, P. A. O’Donnell, and E. Mazer, Handey:
a robot task planner. Cambridge, MA, USA: MIT Press, 1992.
[15] T. Siméon, J. Laumond, J. Cortés, and A. Sahbani, “Manipulation planning with probabilistic roadmaps,” The Int. J. of Robotics Research,
vol. 23, iss. 7-8, pp. 729–746, August 2004.
[16] A. Yershova and S. LaValle, “Deterministic sampling methods for
spheres and so(3),” in IEEE Int. Conf. Robot. & Autom., 2004.
[17] B. Bounab, D. Sidobre, and A. Zaatri, “Central axis approach for
computing n-finger force-closure grasps,” IEEE Conf. on Rob. &
Autom., pp. 1169–1174, May 2008.
[18] R. Suarez, M. Roa, and J. Cornella, “Grasp quality measures,” in
Universitat Politecnica de Catalunya (UPC), Technical Report, 2006.
[19] T. Siméon, J.-P. Laumond, and C. Nissoux, “Visibility-based probabilistic roadmaps for motion planning,” Advanced Robotics Journal,
vol. 14(6), pp. 477–494, 2000.
[20] L. Jaillet and T. Siméon, “Path deformation roadmaps: Compact graphs
with useful cycles for motion planning,” Int. J. of Robotics Research,
vol. 27, no. 11-12, pp. 1175–1188, 2008.
[21] P. Svestka, “Robot motion planning using probabilistic roadmaps,”
Ph.D. dissertation, Universiteit Utrecht, 1997.
[22] L. Jaillet and T. Siméon, “A prm-based motion planner for dynamically
changing environments,” in IEEE/RSJ Int. Conf. on Intelligent Robots
& Systems, vol. 2, Sept. 2004, pp. 1606 – 1611 vol.2.
�
 Daniel Sidobre
Daniel Sidobre Juan Cortés
Juan Cortés