PRACTICAL EXPERIENCES IN INTERCONNECTING LANs
VIA SATELLITE
◆
◆
Nedo Celandroni , Erina Ferro , Francesco Potortì
▲
▲
Alessandro Bellini , Franco Pirri
◆
◆
CNUCE, Institute of National Research Council
Via S. Maria 36 - 56126 Pisa - Italy
▲
Depart. of Electr. Engineering, University of Florence
Via S. Marta 3, 50100 Firenze - Italy
ABSTRACT
We present an experiment in interconnecting LANs
via a satellite link and describe the individual
components involved in the experiment. The project
was developed in two phases: a) design and
realisation of a satellite access scheme that supports
real-time and non real-time traffic with a signal fading
countermeasure, called FODA/IBEA-TDMA 1 ; b)
interconnection of LANs where real-time and non
real-time applications run. The experiment was
presented the first time in June 1994 as a demo in
which the Eutelsat satellite was used (in the 12/14
GHz band) to exchange data between two LANs in
Pisa and Florence, while video and audio applications
running on PCs connected the two sites. The demo
was repeated a few weeks later and the Intelsat
satellite was used in the 20/30 GHz band.
KEYWORDS:
satellite, TDMA fade countermeasure, satellite LAN interconnection, satellite
videoconference
1. INTRODUCTION
Much work is in progress in the field of
communication systems for real-time multimedia
applications over local area networks (LANs). The
goal of our research was to design and develop a
heterogeneous network capable of simultaneously
handling video, voice and data. The network is
heterogeneous in many senses: it is composed of
various types of transmission media (LANs and
satellite links); it carries different types of traffic
(video, voice and computer generated data); and it
uses several protocols, such as TCP/IP over Ethernet
for the connection to external LANs, an internal
Token Ring LAN used for data, audio and video
applications, FODA/IBEA for the satellite network,
and GAFO2 for the communications between the
terrestrial gateway (where the data coming from the
various LANs converge) and the satellite network.
Satellite links are more problematic than terrestrial
links for two main reasons. The satellite round trip
delay is quite significant when transmitting real-time
data (stream data). Moreover, the HF signal may be
considerably attenuated by bad atmospheric
conditions, with a consequent degradation in the
quality of the data transmitted. The latter is currently
one of the major problems for communication
satellites operating at frequencies above 10 GHz. As
the K u band (12/14 GHz) is shortly going to be
saturated, we considered the Ka band (20/30 GHz) for
the satellite network design. FODA/IBEA [11], the
satellite access scheme we have developed, operates
in TDMA. It allows the simultaneous transmission of
real-time and non real-time (datagram) data, while
maintaining the BER3 required by applications, even
in conditions of signal fading, by varying the
information bit energy (fade countermeasure
technique). At the same time, the University of
Florence developed a gateway which takes data
coming from both Ethernet and Token Ring LANs
and sends them to the satellite network using GAFO,
a protocol developed to communicate with the
satellite earth stations.
2
1
FIFO Ordered Demand Assignment / Information Bit
Energy Adaptive - Time Division Multiple Access [11]
GAteway-FOda protocol, a protocol developed ad-hoc for
the communications with the FODA/IBEA stations.
3
Bit Error Rate.
�1 ÷ 8 Mbit/s
Modem
SCSI
Up controller
Down controller
1.5 Mbyte/s
G 703
G 703
64 Kbit/s
Ethernet
10 Mbit/s
RS 449
RS 449
384 Kbit/s
Gateway
BRIDGE
MULTIMEDIA
NETWORK
Ethernet LAN
Token Ring LAN
Data
Voice
Video
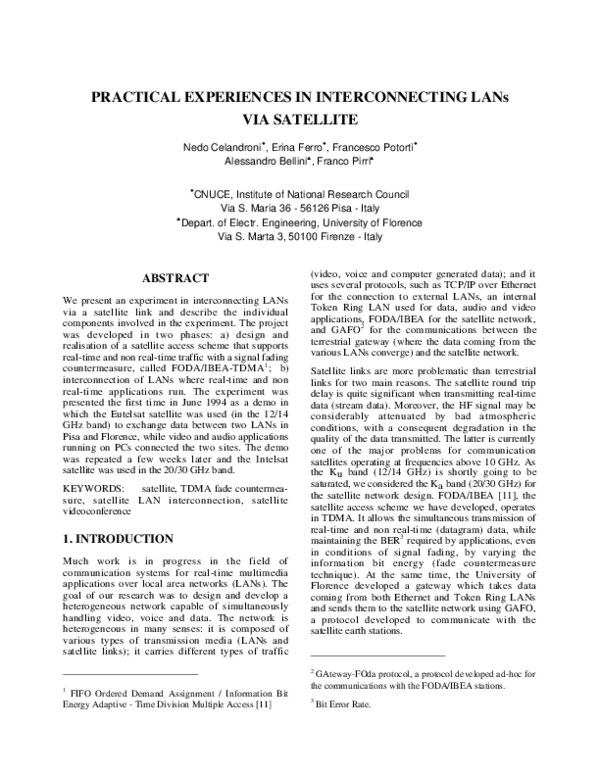
Fig. 1. The network scenario
The paper is organised as follows. In Section 2 the
network scenario is presented, while in Section 3 the
earth station hardware is briefly described. Section 4
describes the satellite access scheme, and Section 5
highlights the features of the GAFO protocol. Section
6 describes the LAN interconnection and outlines the
demonstration of the whole interconnected network.
2. THE NETWORK SCENARIO
Figure 1 depicts the network scenario used in the
demo of the project. The three earth stations had the
same configuration; two of them were located in Pisa,
while the third one was located in Florence (about
100Km away). Although for practical reasons the
demo only involved three stations, this configuration
can easily be extended to a larger number of stations,
up to the hardware limit of 112. Each station needs a
gateway that connects it to an Ethernet LAN and to
stream applications (data, voice, video), or else the
stations can themselves be Ethernet LAN hosts,
provided that the applications that use the satellite link
are equipped with the GAFO protocol interface.
In the configuration used in the experiment, the
stream applications run on hosts connected to a Token
Ring network, while the datagram applications run on
hosts connected via Ethernet. Data from both the
LANs converges at the gateway which communicates
with the FODA/IBEA satellite access system by using
the GAFO protocol. The set of applications running
on Ethernet plus those running on the Token Ring
network plus the gateway are collectively called a
Multimedia Network. This part was developed by the
University of Florence.
FODA/IBEA runs on hardware designed by CNUCE,
in collaboration with Telespazio, and developed by
Marconi R.C. (U.K.). It consists of a TDMA
controller (which includes a variable coding rate
codec), and a variable bit rate burst modem. The
TDMA controller is split into two parts: the Up
�Traffic type
Throughput Packet Length
interactive
control
mail
low
low
low/medium
bulk
high
fax
VOICE
special
standard
degraded
VIDEO
slow scan TV
videoconference
medium
medium
small, variable
small, variable
medium,
variable
medium/high,
constant
big, constant
small, constant
Tolerated
Delay
low
medium
high
BER
Required
< 3·10-7
< 10-8
< 3·10-7
FODA/IBEA
COS
2
1
2
medium/high < 10-8
1
3
2
3
4
3
1
medium
big, constant
medium
< 3·10-5
low, constant
< 3·10-7
< 3·10-5
< 10-3
low, constant < 3·10-5
high
big, constant
low, constant < 10-8
Table 1. Traffic characteristics
controller, for transmissions towards the satellite (uplink), and the Down controller, to receive data from
the satellite (down-link). The communication between
the Down and the Up controller is performed via an
SCSI link at 1.5 Mbytes/s. Dedicated Ethernet lines
connect the gateway to the Up controller and the
Down controller, respectively.
Stream traffic, such as voice, slow-scan TV,
videoconference, etc., is characterised by a constant
packet arrival rate. Stream applications usually require
short and fairly constant delays at the receiving end,
cannot tolerate out-of-order delivery of packets, but
can tolerate occasional bit errors and dropped packets.
In practice, stream traffic needs a fixed amount of
bandwidth on a regular basis and the satellite network
should not alter the inter-arrival time of the packets.
Datagram traffic is sub-divided into b u l k and
interactive types. Bulk traffic applications (typically
file transfer protocols) usually transmit a large number
of packets; however the delay caused by the network
crossing is not critical, so this type of traffic does not
have the rigid delay requirements of stream traffic.
The satellite network can deliver the packets out of
order, since higher level protocols take care of
reordering them. However, corrupted or lost packets
may severely impair the end-to-end throughput of
such traffic, especially on a high delay medium like
the satellite network.
Interactive traffic (terminal access to computers,
database enquiries, operator message exchanges, etc.)
demands error free, reliable delivery of packets and
short end-to-end delay to guarantee acceptable
response times. It often consists of short packets (64
bytes on Ethernet is typical) with very irregular interarrival times.
Table 1 outlines different types of traffic in terms of
the key parameters of delay, throughput and BER
range which are commonly required. The last column
in the table (FODA/IBEA Class Of Service (COS))
represents the mapping of the BER required by the
associated type of traffic onto the satellite network.
Four classes of service are envisaged, and COS
number 1 is associated with the maximum protection
from errors of the data transmitted. The COS number
must be specified when using the GAFO protocol to
pass data from the terrestrial to the satellite network.
For stream data, the COS value is specified only once,
when the virtual channel is set up; for datagram data
the relevant COS value is associated with each packet.
Table Legend:
Throughput (T):
low
medium
high
(T < 1 Kbit/s)
(1 Kbit/s < T < 100 Kbit/s)
(T > 100 Kbit/s)
Packet length (L):
small
(L < 128 bytes)
medium
(128 bytes < L < 1 Kbit)
big
(L > 1 Kbyte)
Delay (D):
low
medium
high
(D < 0.5s)
(0.5s < D < 2 s)
(D > 2s)
�3. THE EARTH STATION HARDWARE
Figure 2 shows the hardware of the TDMA controller
and the variable bit rate burst modem.
As some boards contained in the Down controller are
the same as in the Up controller, some explanations
are given for the Up controller alone.
The Up controller consists of the following boards:
• Standard industrial board with a 25 MHz 68030
processor, 4 Mbyte DRAM memory,
bidirectional SCSI-1 interface, VMEbus
interface, a LANCE chip for Ethernet, 4 RS232 ports (only one is actually used), timers,
real-time clock, and a small non volatile RAM.
It runs VMExec, a PSOS based real time
operating system. The FODA/IBEA software—
which controls and monitors the functions of
the transmit control unit—uses the services
offered by the real-time kernel, namely the
priority preemptive task scheduler and inter
process communication manager. Events,
message queues, semaphores, task suspension
and resumption are supported.
• Transmit serial interfaceThis is a wire
wrapped VMEbus double Eurocard board. It
acts as a buffer between the VMEbus and the
three serial ports of the transmit controller: a
high speed RS-449/RS-422 port (384 Kbit/s),
and two CCITT G.703 ports (64 Kbit/s). This
board is not currently used by FODA/IBEA,
although the necessary software hooks to use it
are in place.
The processor interfaces to the controller via a
number of VMEbus memory mapped ports which
allow transmit data to be written and control and
monitoring data to be exchanged. The interfacing
function is performed by two boards: the transmit
modem interface and the line interface.
• Transmit modem interface
This is a wire
wrapped VME double Eurocard board. It
contains all the channel coding, framing and
symbol rate selection functions. It processes
data presented to it through the 32-bit VME
data bus and also provides status information
for circuit and modem monitoring purposes.
Transmit and control data are directed to a Data
FIFO (First In First Out) which can store up to
512 bytes of data and control information at a
time. The control information sets the channel
coding hardware to the appropriate mode and
the burst transmission timing. The burst format
is depicted in Fig. 3. An interrupt is sent
through the VMEbus when the FIFO reaches
less than half its capacity. Control data is also
written to an event memory, which is used to
synchronise burst transmissions to the transmit
frame. This board is connected to the modem
by a large shielded cable.
• Line interface boardThis board, which has no
software interface with the VMEbus, contains
the line drivers for interfacing to the modem
and also provides the 16.384 MHz reference
clock, derived from a 32.768 MHz oven
controlled crystal oscillator situated on the line
interface board. A coaxial cable carries the
clock signal to the Down controller.
• Channel encoder
This board has no software
interface with the VMEbus. It performs the data
coding functions.
The Down controller hardware consists of the
following boards:
• Receive control processor Same as in the Up
controller.
• Receive serial interface
controller.
Same as in the Up
The interfacing function with the demodulator is
performed by three boards: the receive modem
interface, a line interface board, and the channel
decoder.
• Receive modem interface
This is a wire
wrapped VME double Eurocard board. It is
controlled via a number of ports mapped onto
the VME memory space which allow both
reading and writing of status, control and data
information by the processor. The circuit also
provides the interface to the modem, for data
reception and fault monitoring through a
shielded cable. The decoded data stream is
routed to the receive modem interface. This
interface uses an event memory to perform realtime reception and decoding of the received
bursts. The event memory is filled with
information on the initial code rate and symbol
rate of the bursts within the frame, together
with their expected timing.
• Line interface
Same as the Up controller.
• Channel decoder
Same as the Up controller.
�The most interesting feature of the burst modem is
that its symbol rate, coding rate and transmit power
level can be dynamically adjusted within a data burst.
The transmit power of the individual data sub-bursts
(see Fig. 3) is tuneable in steps of 0.5 dB in a 20 dB
range. Each sub-burst can be transmitted at a different
symbol rate (and, hence, different symbol energy) as
required. The available symbol rates are 512, 1024,
2048 and 4096 Kbaud in either BPSK or QPSK
modulation formats. In order to meet the dynamic rate
requirements the modem is implemented using digital
signal processing (DSP) techniques. The codec
supports variable coding rates: uncoded PSK and 1/2,
2 / 3 , 4/5 punctured codes, derived from a 1/2
convolutional encoder, thus providing one more way
to adapt the information bit energy to the channel
quality. Coupled with the symbol rate agility, this
allows an overall information rate of 512-8192 Kbit/s
in QPSK or 256-4096 Kbit/s in BPSK.
Satellite
4. THE SATELLITE ACCESS SCHEME
4.1 Master/slave functions
FODA/IBEA-TDMA control is centralised. Any
station can be the control station (master), while
concurrently acting as a slave station. If faults arise,
the master station may be replaced by any other
station.
The issue of centralised versus distributed control is in
constant debate. A centralised algorithm is more
robust than a distributed one in most sorts of
contingencies, because one station alone (the most
powerful or the least faded one) is responsible for the
consistency of the burst time plan. In the distributed
case all stations are responsible, so all stations have to
listen to each other, thus increasing the chances that
some control information is lost or misinterpreted and
the burst time plan corrupted. Distributed control, on
the other hand, is more responsive to traffic
variations, because only one round trip time is needed
for the network to find out the traffic situation of its
components, so highly bursty traffic sources are more
efficiently dealt with, thereby increasing the global
channel utilisation. Distributed control systems may
compensate for the lack of robustness with complex
recovery algorithms, which usually impose some
additional channel overhead.
We chose centralised control because of its
robustness, letting the complex datagram assignment
algorithm (discussed below) compensate for the
responsiveness deficiencies caused by the double
round trip delay.
The functions of the master and slave stations are
reported below.
Fig. 2. The hardware configuration
The decoder operates asynchronously with 1 bit sign/3
bits magnitude soft decisions.
Depending on the BER requested by the application,
the FODA/IBEA system software guarantees error
rates better than 10- 3, 3·10 -5 , 3·10 -7 and 10-8 , by
adapting the power level, the symbol rate and the code
rate to the signal/noise conditions.
A detailed description of the hardware can be found in
[1], [2], [3], [4] and [5].
The master:
a) allocates time within the TDMA frame for the
stream and the datagram transmissions of the
slaves on the basis of their requests,
b) broadcasts the fade level declared by each station,
c) maintains the synchronisation of all the stations
within the network,
d) is responsible for maintaining the optimum
transmit power level, which is used by all the
slaves as a reference level,
e) uses the frame space allocated to itself to send
data over the network in the same way as any
other slave station.
The slave:
a) sends allocation requests for stream and/or
datagram transmissions to the master,
�Frame length 20 ms
Guard space
Guard space
R
B
TX
window
Burst
station
#1
TX
window
Burst
station
#3
TX
window
Burst
station
#2
TX
window
Burst
station
#4
F
A
S
REFERENCE BURST
Burst
Preamble
MUW
Guard
Time
Control
Info
Burst
Preamble
CRC
BURST
TUW
CSB
Sub
burst
#1
…
Sub
burst
#n
CRC
SUB-BURST
unused space
Sub-burst
Preamble
SBUW
Stream or Datagram
data for station #k
CRC
Fig. 3. Frame, Burst and Sub-burst Formats
b) communicates its fade level to the master station,
c) adjusts the transmit power level keeping the
master as a reference,
d) uses its allocated frame space to send data
throughout the satellite network,
e) chooses the symbol rate and the code rate for the
single data sub-burst to send inside its
transmission window, depending on the fade level
of each link.
4.2 The frame format
The FODA/IBEA frame is 20 ms long; the format is
shown in Fig. 3.
Picture legend:
RB
Reference burst.
Burst Preamble
For modem acquisition.
Sub-bursts preamble For modem acquisition.
Shorter than the burst preamble.
MUW Master Unique Word. For modem
acquisition. Relevant to the reference burst
only.
TUW
Traffic Unique word. For modem
acquisition. Relevant to each data burst
SBUW Sub-burst Unique Word. Half the length of
the MUW or TUW.
Control info
This part of the RB contains the
stream and datagram assignments of each
station, the fade level measured by each
station, the frame number, the address of the
next master station (in case of master
recovery procedure), etc.
CSB
Control Sub-Burst. It describes the relevant
data burst. It contains information describing
the individual sub-bursts contained in the
burst, such as the data destination, length,
coding and bit rate, information relative to
the disassembling and reassembling of the
data, the datagram and/or the stream
requests, the measured fade levels, etc.
CRC
Cyclic Redundancy Check.
TX window
Time for data transmission
assigned to station.
FAS
First Access Slot.
As in all TDMA systems, the choice of the frame
length is the result of a compromise between delay
and jitter issues, which call for a short frame length,
and overhead issues, which call for a long one.
The minimum overhead per frame (due to the
reference burst and the guard times, in Fig. 3) is about
8.6% of the available bandwidth of 8 Mbit/s with the
timings of the current prototypal hardware and the
parameters chosen for the reference burst. The rest of
the channel is available for burst transmissions, where
every burst and every sub-burst within a burst needs
some overhead.
The real-time data jitter issues have been studied in
[10] which shows that the worst case jitter added by
the FODA/IBEA system is two times the length of the
frame, and the average delay added to the round trip
delay is equal to the frame length. Our prototypal
�software adds one more frame length delay, mainly
because of CPU speed problems.
the datagram sub-frame can be extended to the whole
frame (apart from the reference burst space).
4.3 The Fade Countermeasure Technique
The reference burst is sent by the master station in
order to assign the time allocations (transmission
window times) for the transmissions of the requesting
slave stations. The reference burst is always sent at a
bit rate of 2 Mbit/s and a coding rate of 2/3, thus
allowing a 10-5 probability of correct reception for
down link fades up to 14 dB.
A station uses its assigned transmission window to
send its stream and datagram data together. Data can
be multiplexed inside a transmission window,
allowing the datagram data to be transmitted in the
portion of the stream assignment when possible, such
as during the silence periods of the voice applications.
Due to the assignment algorithms (described in 4.4),
the part of a transmission window assigned to the
stream data transmission maintains its size in every
frame (if no explicit updates are requested), while the
part for the datagram data may change size at each
frame. Therefore, the transmission window sizes must
be recalculated by the master at each frame.
Space for a First Access Slot (FAS) is reserved every
32 frames, by reducing the space available for data
transmission, to allow a new station to enter the
network. This slot is used in contention among all the
new stations. The FAS is sized for sending requests,
control information and a small amount of data, plus
the uncertainty due to the current satellite position
with respect to the nominal satellite position. This
safety space is currently set to ±150µs. The FAS has a
fixed position inside the frame (before the end of the
frame). It must be accessed at 1 Mbit/s, 2/3 coded.
This bit rate is lower than the bit rate of the RB
because even heavily faded stations must have the
opportunity to enter the satellite network. In this case,
the faded station receives the RB affected by the down
link fade only, but it receives its own FAS affected by
both up and down link fades. The lower FAS bit rate
is intended to cope with this situation.
The term stream sub-frame will be used hereafter to
indicate the overall amount of frame devoted to the
stream allocations. Likewise, datagram sub-frame
indicates the amount of frame devoted to the datagram
allocations. In both cases, it does not mean that all the
stream assignments are concentrated in the first part
of the frame and the datagram assignments in the
second part. The terms merely indicate the amount of
frame available to support stream and datagram
traffic, respectively. In the absence of stream traffic,
In unfaded conditions, the stream sub-frame is sized
up to an NSUB (Normal Stream Upper Boundary)
value. When fade occurs the stream transmissions can
expand by increasing, if necessary, the stream subframe size up to a value called ESUB (Extended
Stream Upper Boundary), and the datagram sub-frame
is correspondingly squeezed, thus reducing the
bandwidth available for datagram traffic. The data
enlargement is due to the adaptation of the
information bit energy to the channel conditions. In
order to maintain the requested bit error rate, the code
rate is changed; if changing the coding is insufficient,
the data rate is reduced too. The fade level of the
sending station and of the receiving station in the
worst conditions (if more than one receiving station)
are kept into account. The information relevant to the
fade level of the stations in the satellite network is
maintained in the reference burst.
Reducing the data rate by one octave means that the
bit energy is doubled and that the Eb /No 4 ratio
increases by 3 dB. The coding rate can be reduced in
smaller steps, and moreover the corresponding E b /No
gain is greater than the bit energy increase, because of
the Viterbi decoding technique. That is why reducing
the coding rate is preferred rather than reducing the bit
rate, as long as it is possible. Therefore, there is a
relationship between the Eb /No values of the sending
and the receiving stations, the class of service which
must be maintained, and the choice of the adopted
coding rate and bit rate. In the FODA/IBEA software
there is a complex table linking all these values in
such a way that by using any of this information as
input the other ones can easily be obtained. Data
redundancy is achieved by increasing either the
coding rate (Rc), or the bit rate (Rs), or both (Ri). The
redundancy information factor Ri indicates the ratio
between the energy per information bit of the data
sent at certain bit and coding rates and the energy per
information bit of the same data sent uncoded at
8Mbit/s. Ri can be expressed as the product between
the code redundancy R c and the bit rate (speed)
redundancy Rs. Ri expresses the data enlarging due to
the increase in the code rate and to the reduction in the
bit rate. When the signal attenuation increases, we
compensate by reducing the coding rate first. We
4 Bit energy-to-noise density ratio.
�halve the bit rate only when E b /No drops under the
value required for the burst acquisition.
The relationships between Ri and the fade level
supported by the relevant Ri are shown in Fig. 4. The
fade level represents the number of dBs of the
available C/No (carrier power over noise density)
ratio below the value of 81 dB assumed as fade level 0
(reference level or clear sky condition). When
operating in clear sky conditions at the bit rate of
8Mbit/s, the Eb /No ratio is 12dB. With QPSK
modulation, this value of Eb /No allows the reception
of uncoded data with a BER lower than 10-8, which is
commonly taken as an equivalent to a “no errors”
condition for satellite transmissions.
16
Redundancy level
14
Ri
Ri
Ri
Ri
12
10
for
for
for
for
COS1
COS2
COS3
COS4
8
6
4
2
stations will usually have a chance to transmit at every
frame, even if they have no data to send. Even when
the channel is very busy, every station is guaranteed
to get at least one allocation every eight frames, as
described in 4.4.2.
4.4.1 Real-time data
In clear sky conditions, to get a channel allocation, an
application makes a request to a station via the GAFO
protocol, indicating the requested channel space Cr,
the minimum acceptable space Cm and the requested
class of service (see Table 1). The value Cm is lower
than C r if the application can respond to a bandwidth
compression request from the station; otherwise they
are equal. When a new stream application needs
channel space, the slave sends to the master a request
which is the sum of its currently active stream
application sizes plus the new one. The request
includes the transmission overhead, and has a NEW
flag, meaning that it is made because of a new
application. The master grants a NEW stream request
if the stream sub-frame size does not exceed the
NSUB value. The rest of the channel is used for
datagram transmissions. When a request for sending
stream data issued by a slave station is accepted, the
master maintains it until it is updated by the slave
station.
0
0
2
4
6
8
10
12
14
16
Fade level [dB]
Fig. 4. Redundancy level behaviour
The choice of 8dB as the minimum E b /No value
necessary for modem acquisition comes from an
experimentally measured burst acquisition miss rate
of about 10-5 with our hardware. The non acquisition
is measured by counting the number of non
acquisitions, which account for missed carrier
acquisition, missed clock synchronism and missed
UW5 due to too many errors. The false alarm
condition can be measured separately and its
occurrence can be made as small as desired with
respect to the other contingencies by choosing the
appropriate UW pattern and length.
4.4 The requests and the assignments
Once active, a slave station can make requests to send
stream data and datagram data during its transmission
window. When the channel utilisation is low, the
5 Unique Word
During fading contingencies, a slave may need to
increase the data redundancy of some of its stream
applications in order to maintain the requested BER.
In this case, the slave asks the master to enlarge its
stream allocation, making a request with the EXTRA
flag set. The master station acknowledges requests
with the EXTRA flag if the stream sub-frame size
does not exceed the ESUB value, which is greater
than NSUB. In such a situation, the total channel
space for datagram (the datagram sub-frame) is
reduced for the duration of the fading event. The
master can also “partially acknowledge” the request,
so that the applications will run in degraded BER
conditions.
If the master only partially acknowledges the
increased EXTRA request of a station, the slave asks
the stream applications (by using the GAFO protocol)
to reduce their throughput to the declared
cifications. If the applications cannot be sufficiently
compressed, they will work in degraded BER
conditions until some applications end and release the
channel or the fade becomes lighter. It is up to the
applications to decide whether to continue the session
�at a degraded performance or to give up, leaving their
stream allocation to other users.
Both when some applications are compressed and
when some of them work in degraded conditions, the
station is said to be suffering, and it will periodically
ask the master for more stream allocation space. The
space it may obtain at each request will be distributed
among the suffering applications.
4.4.2 Non real-time data
Each station manages stream and datagram data by
making different requests for each type of traffic. The
policies used by the slaves for requesting datagram
space and those used by the master to allocate the
datagram bandwidth to the stations are completely
different from those used for stream traffic. In
particular, stream allocations that are accepted are
guaranteed until they are released, while datagram is
never guaranteed, and the available bandwidth for
each station generally varies on a frame-by-frame
basis.
The request a slave makes to the master to send
datagram data is proportional to the datagram traffic
coming into the station (traffic) plus the volume of
data already waiting for transmission to the satellite
(backlog).
We have:
request = backlog + h traffic
where h is a temporal constant of proportionality.
Simulation results, obtained by loading the channel
with Poisson generators of datagram traffic for 10
stations indicated a value of 0.4 s for the h parameter
as a good trade-off between the average transmission
delay at high and low traffic loads.
The slaves issue their datagram requests as frequently
as possible, in order to give the master an up-to-date
situation of the traffic entering them. The master
organises the requests of all the slaves into a
datagram ring, which it scans cyclically to compute
the assignments. Any datagram request received from
a slave already in the datagram ring is considered an
update and replaces the previous value. The length of
the assigned transmission window (a) is proportional
to the request in a range of values between a
minimum (T min ) and a maximum (T max) threshold.
We have:
Tmin ≤ a = f r ≤ Tmax
where f is the coefficient of proportionality in the
assignment. In the current implementation f was set
equal to the number of active stations divided by 100,
with 5% as minimum and 50% as maximum. Tmin was
introduced for efficiency purposes. This avoids small
allocations when the transmission overheads are too
big with respect to the information data. T max prevents
an overloaded station from removing too much
capacity from the other stations. After each
assignment, the relevant datagram request in the ring
is decreased by the assignment itself and the next
request is analysed, if space is still available in the
frame. The ring is not scanned more than once in a
frame. We call a complete scan of the datagram ring
an assignment cycle. So, no more than one assignment
cycle is made in a frame.
In each frame the master performs the following
actions to complete the assignment procedure.
• It accommodates as many requests as possible
according to the space available in the datagram
sub-frame. Some stations then will have got an
assignment, others will not, either because they did
not make any request, or because there was not
enough space available to satisfy all the requests.
• At this point a fixed assignment (previously
reserved), called a control slot, is given to a station
that has no assignment. The station is chosen with
a Round-Robin criterion. If all stations already
have an assignment, the control slot space is added
to the unassigned space (which may even be null).
In the frames where space for an FAS is reserved
(once every 32 frames) a control slot is not
assigned. After the control slot assignment, the
unassigned space (if any) is divided among the
stations as described in the following points.
• If all stations have a datagram assignment, the
available space is divided among those stations
which are still in the datagram ring, i.e. those
whose request has not been exhausted.
• Otherwise, the available space is divided among
all the stations. This is only possible if the
resulting quotient is greater than the minimum
datagram assignment.
• If this is not the case, the space is divided only
among all the stations which did not receive
any assignment. Again, the quotient must be
greater than the minimum assignment.
• If this is not the case, the space is divided only
among all the stations which have already
received an assignment. In this case, it is not
necessary to satisfy the constraint on the
minimum because this assignment only is an
enlargement of the space assigned in the first
step of this procedure.
One control slot is assigned every eight stations, thus
every station is guaranteed to get at least one
allocation every eight frames. The control slot
assignment coupled with this complex set of rules
�allows a quick response time to traffic spikes at the
slaves’ inputs. When the system is lightly loaded, the
system behaviour approaches that of a fixed TDMA
(F-TDMA). We call this situation pre-assignment
mode. The system gradually migrates towards a
“pure” FODA/IBEA assignment scheme when the
channel load exceeds a threshold (pre-assignment
limit, [9]). A moderately loaded system can absorb
abrupt traffic variations without appreciable delays,
because each slave station has some spare capacity
[13].
When the load is low (pre-assignment mode) the
assignment cycle is always one frame long, and some
spare capacity is always available to be shared among
the stations. When the assignment cycle consistently
exceeds one frame, no capacity is ever available to be
shared. In this state the control slot is cyclically
assigned, while the other rules for distributing the
spare space are not applied because there is never a
residual capacity after the datagram ring has been
scanned.
A study of the performance of the datagram
assignment algorithm is presented in [9].
Fading conditions cause an increase in the backlog
and in the instantaneous traffic of the faded station
and of the stations transmitting to it, because the same
information needs more channel space to be
transmitted at the same BER. This automatically
increases the datagram request of the slaves to the
master. Due to the increase in the datagram requests
and to the possible simultaneous expansion of the
stream sub-frame, which reduces the datagram subframe size, the overall datagram capacity of the
system may become significantly smaller under heavy
load conditions.
This scenario is not unlikely, and such a squeezing of
the datagram capacity can be quick enough to call for
a congestion control scheme. FODA/IBEA
incorporates a simple backpressure method to relieve
congestion, by blocking the growth of the backlog for
a while when the internal queues grow too much.
Since datagram data is collected from high speed
networks, the only effect of this procedure is to slow
down the datagram traffic coming from the remote
hosts for a convenient interval of time. High and low
water marks on the backlog queue of each station are
used to detect the “danger” and “out of danger”
conditions, and trigger the sending of the appropriate
GAFO control messages to the gateway.
In [14] a procedure to make a rough estimation of the
queuing delay is indicated.
5. THE PROTOCOL TO ACCESS THE
SATELLITE NETWORK
An ad-hoc protocol (GAFO protocol [6]) has been
developed to handle communications between the
satellite network and the gateway interfacing it. The
protocol provides for control messages and data
messages. Specifically, the control messages allow the
system to:
• set-up/close a connection-oriented session for
stream applications;
• build/cancel/modify a sub-set of users allowed to
receive data;
• exchange control information about the network
addresses of the gateway, the Up controller and the
Down controller;
• stop/resume sending datagram data (congestion
control);
• exchange information about the status of other
stations.
The data messages support :
• sending/receiving stream data with/without CRC;
• sending/receiving datagram data with/without
CRC;
• sending/receiving test data with/without CRC.
The protocol was implemented in the C language on
the Up controller, the Down controller and the
gateway. The control packets are 12 bytes long, while
the overhead for the data packets is 6 bytes. This
information is not transmitted to the satellite link.
6. LANs INTERCONNECTION
COMMUNICATION
LINK
MULTIMEDIA
NETWORK 1
(PISA)
MULTIMEDIA
NETWORK 2
(PISA)
MULTIMEDIA
NETWORK 3
(FIRENZE)
Fig. 5. MALAN Logical Structure
While the CNUCE Institute was developing the
satellite access scheme and the relevant hardware of
the earth station, the Department of Electronic
Engineering of the University of Florence was
carrying out an experiment based on current
�multimedia applications, to prove that satellite
interconnected LANs can support voice, video and
data transmissions [12]. This experiment, named
MALAN (Multimedia Applications on LANs) was
developed in a scenario characterised by two
fundamental components:
• the communication link, consisting of earth
stations and satellite,
• the local infrastructure, connected by the
communication link and consisting of a collection
of LANs (Ethernet and Token Ring).
Two fundamental prerequisites had to be fulfilled:
• to develop a set of significant applications
involving voice, video and data;
• to package those applications in a portable system.
The logical configuration of the experiment is shown
in Fig. 5, where each box labelled Multimedia
Network represents a portable system together with
the applications.
A Multimedia Network consists of several elements
(Fig. 6):
• the Gateway, which connects the whole system to
the Communication Link;
• the Applications, i.e.:
- Data a file transfer application based on
TCP/IP,
- Video a real-time videoconference application,
- Voice a real-time telephone link application.
• the internal Token Ring LAN.
• the external Ethernet LAN.
Each Multimedia Network is connected to the
Communication Link through the gateway. It
introduces a simple priority mechanism in favour of
the stream traffic, as it can distinguish between
information coming from the Data application and
information from Voice and Video applications. The
latter always has precedence over the former. In
addition, the gateway measures the total traffic
flowing back and forth from the LAN and the
Communication Link.
Applications were selected in order to represent the
most significant media: data, voice and video. Data is
a TCP/IP based application and transfers files. The
files being transferred are static images which are
displayed as received. Each image is 153 Kbytes and
the image format is VGA bitmap. Data could thus be
defined as an image transfer application. In this way
two goals are achieved:
• to significantly load the LAN,
• to visually control the results of the application.
Images are transferred iteratively, without any action
by the user.
Voice provides a real-time telephone-like connection.
Using a simple interface, users call a remote
destination and start a conversation. Two options are
available: voice sampled at 8 bits and voice sampled
at 14 bits extended to 16, without any encoding. In the
first option, traffic of 64 Kbit/s is generated; in the
second, traffic of 128 Kbit/s is generated.
Video provides the core of a video-conference service,
i.e. the real-time transmission of voice and video.
Making use of the same interface applied in Voice, a
remote user can be called and a remote conversation
can start. Two communication options are available:
384 Kbit/s and 1664 Kbit/s.
The active elements in the Multimedia Network are
connected by means of two LANs: a 10 Mbit/s
Ethernet and a 16 Mbit/s Token Ring. Ethernet and
Token Ring are selected alternately, so as to get an
empirical comparison.
To/From FODA/IBEA
via GAFO protocol
Ethernet LAN
ETHERNET
Voice
GATEWAY
64 Kbit/s
Video
RS 449
Data
T
O
K
E
N
R
I
N
G
MULTIMEDIA
NETWORK
Fig. 6. The Multimedia Network structure
6.1 Physical description of the multimedia
network
From a physical point of view, the Multimedia
Network is a rack packaging four computers
connected by two separate networks, an Ethernet and
a Token Ring, plus a complex set of peripheral
equipment for voice and video acquisition. The
physical structure of the Multimedia Network is
depicted in Fig. 6.
�The boxes within the Multimedia Network are PC
based on Intel 486 DX2, 33MHz clock, equipped with
8 Mbyte RAM and a 130 Mbyte hard disk. Each
computer is equipped with two network boards:
Ethernet and Token Ring. In addition, the gateway is
equipped with an extra Ethernet to interface the
Communication Link. Voice and Video are equipped
with a board, named XIL-DSP, designed and
developed by DEE. XIL-DSP contains a Field
Programmable Array (FPGA) and a Digital Signal
Processor (DSP), memory and logic to interface to the
external world. The programmability of both the
FPGA and the DSP allows the same board to be used
for both voice and video.
A microphone and a loudspeaker are connected to
Voice by means of an XIL-DSP board. A Rembrandt
video-codec, made by Compression Labs Inc. (CLI),
is connected through an RS-449 link to video. A
monitor, a microphone, a loudspeaker and a camera
are also connected to the videocodec. Each computer
can be connected to a monitor and a keyboard. An MS
DOS operating system is installed on each computer,
and the driver for the communication adapter is a
Packet Driver rel. 10 from Clarkson University. The
drivers for XIL-DSP were specially developed by
DEE. C is used as the programming language, with a
small Assembler portion.
6.2 The experiment
The Olympus satellite was used for many hours to set
up and test the TDMA controller hardware and the
satellite access scheme. When Olympus became
inoperative, the Italsat satellite was used as a test bed.
A videoconference demonstration was held in Pisa on
June 10 for the 13th Management Committee Meeting
of the COST-226 project. In this case the Eutelsat
satellite was used (12/14 GHz frequency band). The
same demo was repeated few days later in the
presence of representatives from several Italian
Research Institutes, and the Italsat satellite was used
(20/30 GHz frequency band). In both cases, the
satellite was accessed by means of 3.5 m mobile
antennas.
Three stations were involved, one in Florence and two
in Pisa. There was a non-stop videoconference
working between two stations. Each one sent and
received traffic from two stream applications running
on PCs, exchanging compressed digital video and
sampled digital audio data through the FODA/IBEA
system. Both local (Pisa-Pisa) and remote (PisaFlorence) connections were established. The total
traffic on the satellite channel always exceeded
2.5Mbit/s. Datagram connections were also tested
with TCP/IP packets, both alone and with stream
traffic, involving all three stations in several
configurations composed by different numbers of FTP
and TELNET sessions plus the data, video and voice
application described above. Data was transmitted at 8
Mbit/s, uncoded.
In this experiment Voice and Video were tested
running in the presence of Data. In other words, Data
was inserted to represent the background traffic
sustained by the network during normal activities. The
data transfer made use of all the spare capacity left by
the stream application (video and/or audio). The
quality of human interaction, both for voice and
video, was evaluated on three levels:
- poor i.e., poor intelligible sound and video;
- avg i.e., average intelligible sound and video;
- high i.e., fully intelligible sound and video.
The results of the MALAN experiment were
encouraging. Even the worst quality video, at 384
Kbit/s, was intelligible except for rare sequences
characterised by rapid motion (as in cartoons). In any
case, it is difficult to establish where the fault lies and
384 Kbit/s are probably intrinsically insufficient for
quality video applications.
The most important results can be summarised as
follows:
• Voice sampled at 8 bits is not good for all
configurations. On the other hand, voice sampled
at 14 bits, extended to 16, is always good, even in
the presence of heavy background traffic.
• The same applies for video. Video at 384 Kbit/s is
not good and video at 1664 Kbit/s is good.
• The maximum traffic available for the data
application in the case of Token Ring is less than
the one available for Ethernet.
With regard to the last point, it is surprising that a
deterministic protocol, such as Token Ring, performs
worse than a random access protocol, such as
Ethernet, in the transmission of isochronous traffic.
Three main accidental causes account for this
experimental anomaly:
1) the priority mechanisms available in the Token
Ring were not exploited in the experiment;
2) stream and datagram applications use short
packets, up to a few hundred bytes long; this may
favour Ethernet;
3) software drivers available in the public domain
may be not optimised for the Token Ring.
�CONCLUSIONS
In the first phase of the project the FODA/IBEA
satellite network (software plus hardware) was
developed which, up to now, is a prototype unique in
the world of TDMA satellite networks which can
adapt the robustness of the data transmission to the
fade conditions of both the sending and the receiving
stations. Inside the same transmission window data
are addressed with different redundancy information
values according to the atmospheric conditions of the
stations. The performance of the FODA/IBEA
satellite access scheme has been studied in depth [8, 9,
10, 13, 15].
As far as the second phase of the project is
concerned, important conclusions can be drawn from
the results of this project:
• the satellite link can be divided among many users,
like any other terrestrial link;
• the already existing infrastructures (LANs) can be
used for multimedia applications.
As far as the first point is concerned, only one satellite
channel can interconnect several sites with a complete
net. This is not easy to achieve with terrestrial links.
Only one channel multiplexes stream and datagram
data together, reserving the available bandwidth for
the datagram after stream handling. It is possible to
define high-level software protocols which reserve a
minimum space for the datagram data and handle the
stream sessions in an adaptive way (by reducing the
performance if too many requests have to be handled).
As for the second point, we have demonstrated that
the satellite can effectively carry multimedia
applications between existing LAN technologies. This
has advantages both in terms of costs and in the local
diffusion of services.
REFERENCES
[1] GEC-MARCONI Research Centre: "Working
specification for Olympus TDMA equipment",
Issue 2.0, Y/212/9883, August 1990.
[2] GEC-MARCONI Research Centre: "Olympus
TDMA equipment. Software Manual. Issue 2",
MR 91/60A/, Y/212/10441, September 1991.
[3] GEC-MARCONI Research Centre: "Olympus
TDMA equipment. User Manual. Issue 2", MTR
91/60A, Y/212/10440, September 1991.
[4] GEC-MARCONI Research Centre: "Olympus
TDMA equipment. Transmit and receive
controllers. Hardware manual. Issue 2.", MTR
91/60A, Y/212/10442, September 1991.
[5] GEC-MARCONI Research Centre: "Olympus
TDMA equipment. Burst mode modem
equipment
m a n u a l " , MTR 91/60A,
Y/212/10443, September 1991.
[6] Celandroni N., Ferro E. "The GAFO protocol. The
protocol to access the FODA/IBEA system",
CNUCE Report C94-03, January 1994.
[7] Celandroni N., Ferro E., Potortì F. "MTG. Multiapplications Traffic Generator. Presentation
and Use", CNUCE Report C94-04, January
1994.
[8] Celandroni N., Ferro E., Potortì F. "Outage
probability of an adaptive TDMA satellite
access scheme", proceedings of the IEEE
International Conference on Communications
ICC'93, Geneva (CH), May 23-26, 1993, pp.
1449-1454, Vol.3.
[9] Celandroni N., Ferro E., Potortì F. " The
performance of a capacity assignment algorithm
for non real time traffic in a TDMA satellite
system", submitted to the International Journal
on Satellite Communications, September 1994.
[10] Celandroni N., Ferro E., Potortì F. "Jitter
removal for real-time applications in a satellite
TDMA scheme", submitted to the International
Journal on Satellite Communications, June
1994.
[11] Celandroni N., Ferro E., James N., Potortì F.
"FODA/IBEA-TDMA: a flexible fade
countermeasure system for integrated services
in user oriented networks", International Journal
on Satellite Communications, Vol. 10, pp. 309323, December 1992.
[12] Bellini A., Pirri F., Guarducci M. "Multimedia
Applications on Local Area Networks: a
practical experience", 3rd Int. Conference on
Broadband Islands, Hamburg, Germany, 7-9
June 1994.
[13] Celandroni Nedo "Linear analysis of the
transient for a datagram demand assignment
satellite access scheme in TDMA", CNUCE
Report C94-29, December 1994.
[14] Celandroni N., Ferro E. "The FODA-TDMA
satellite access scheme: presentation, study of
the system and results", IEEE Transactions on
Communications, Vol. 39, N. 12, pp. 18231831, December 1991.
[15] Celandroni N., Ferro E., Potortì F. "The
performance of the FODA-TDMA satellite
access scheme measured on the ITALSAT
satellite", ICDSC-10,15-19 May 1996, Brighton,
UK, pp. 332-338.
�
 Alessandro Bellini
Alessandro Bellini