Research Journal of Applied Sciences, Engineering and Technology 6(22): 4271-4280, 2013
ISSN: 2040-7459; e-ISSN: 2040-7467
© Maxwell Scientific Organization, 2013
Submitted: March 06, 2013
Accepted: April 02, 2013
Published: December 05, 2013
A Differential Evolution Based Adaptive Neural Network Pitch Controller for a Doubly Fed Wind
Turbine Generator System
1
A.H.M.A. Rahim and 2Syed A. Raza
1
Department of Electrical Engineering, King Fahd University of Petroleum and Minerals, Dhahran 31261,
Saudi Arabia
2
Department of Electrical Engineering, Prince Mohammad Bin Fahd University, Al-Khobar, Saudi Arabia
Abstract: Extraction of maximum energy from wind and transferring it to the grid with high efficiency are
challenging problems. To this end, this study proposes a smart pitch controller for a wind turbine-doubly fed
induction generator system using a Differential Evolution (DE) based adaptive neural network. The nominal weights
for the back-propagation neural network controller are obtained from input-output training data generated by DE
optimization method. These weights are then adaptively updated in time domain depending on the variation of the
system outputs. The adaptive control strategy has been tested through simulation of complete system dynamics
comprising of the turbine-generator system and its various components. It has been observed that the DE based
smart pitch controller is able to achieve efficient energy transfer to the grid and at the same time provide a good
damping profile. Locally collected wind data was used in the testing phase.
Keywords: Adaptive pitch control, back-propagation neural network, differential evolution, doubly fed generator,
wind turbine
INTRODUCTION
Most modern wind turbines used in utility are the
variable speed Doubly Fed Induction Generator (DFIG)
or Permanent Magnet Synchronous Generator (PMSG)
types. Although costly power electronics are required to
convert power at varying frequency, the variable speed
wind turbines are industry favorite because of their
better energy capture capability, operation at higher
efficiency and lower loading (Muljadi and Butterfield,
2001). When compared with the synchronous generator
type, the DFIG wind turbine have additional advantage
in terms of reduced converter losses, independent real
and reactive power control, grid support through
reactive control etc. (Lin et al., 2011a) The utility-scale
turbines generally have three levels of control, the
uppermost is supervisory control, mid-level turbine
control and in the lowest level are the pitch actuator
control, the generator and power electronics control
(Johnson et al., 2006).
A major disadvantage of the induction type wind
generators is their sensitivity to low voltage conditions
at the grid. Fault ride of DFIG is a matter of intense
research in the recent times. Various types of controls
on the converter system have been attempted by several
investigators. Reference (Vinothkumar and Selvan,
2011) presents an interesting strategy of low voltage
ride using a circuit comprising of a rectifier and IGBT
in the rotor side converter and inductor in parallel with
it. Voltage source inverter with current controller was
employed by Muyeen et al. (2011) for fault ride
through. Hybrid current controllers in the converter
circuit has been used for improving fault ride through
capabilities which comprises of a standard PI controller
in addition to hysteresis current controller (Mohseni
et al., 2011). A voltage source converter connected
between the generator and grid, termed a voltage
restorer and a virtual resistance deactivating the normal
crowbar has been employed for riding low voltages
(Ibrahim et al., 2011; Hu et al., 2011). Use of FACTS
(flexible ac transmission system) and energy storage
devices which supply both real and reactive power have
the additional advantage that they also provide damping
to the system during the low voltage recovery. The
devices which have been used to enhance the wind
system performance vary from simple static VAR
controller (Amaris and Alonso, 2011), battery energy
storage (Mendis et al., 2012), supercapacitor with
STATCOM (Qu and Qiao, 2011; Rahim and Nowicki,
2012), etc. Superconducting magnetic energy storage
(SMES) units can be controlled to supply both real and
reactive power and are shown to be effective in terms of
leveling wind power fluctuations as well as low voltage
ride through (Shi et al., 2011; Yunus et al., 2012).
The inertia of the turbine-generator rotor is large
and hence the rotor speed control is relatively slow. The
Corresponding Author: A.H.M.A. Rahim, Department of Electrical Engineering, King Fahd University of Petroleum and
Minerals, Dhahran 31261, Saudi Arabia, Tel.: +96638604986
4271
�Res. J. Appl. Sci. Eng. Technol., 6(22): 4271-4280, 2013
Vw
Adaptive Pitch
Controller
W ind
Power
Pref
Power
Sensor
− Pe
Generator
Vb
Vs
Is
Gear
Transm. Line
Wind
Turbine
Rt
VC
+
IC
Ir
Vr
Et
Lt
Ia
Y11
Converter
Circuits
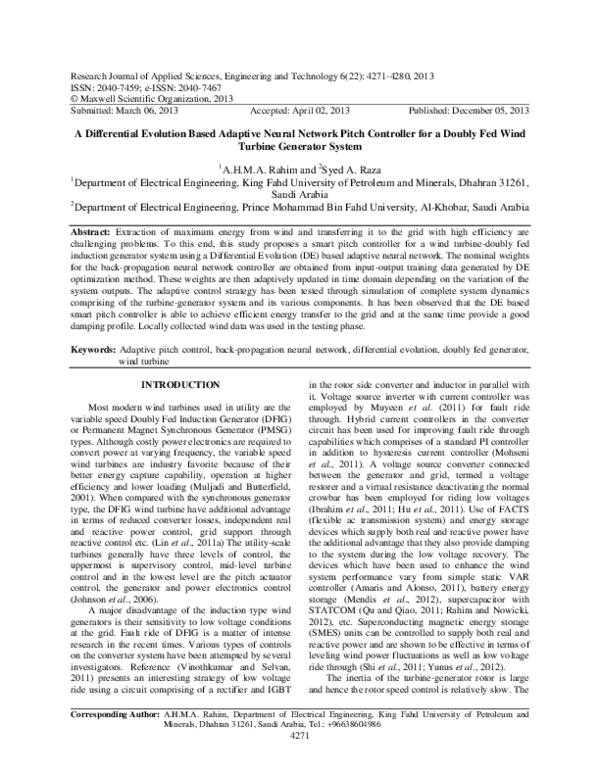
Fig. 1: DFIG system configuration equipped with pitch controller
doubly fed generator based wind plants do not have
considered. Since the generator wheels the energy, its
good frequency response characteristics because of lack
dynamics should be adequately modeled. Also, because
of coupling between grid frequency and output power.
of random nature of wind variation, the any control
Also, the DFIG does not have reserve margin in
design should include the system nonlinearities. This
maximum power tracking (Zhang et al., 2012). Since
makes the pitch controller design difficult. In this study
pitch control is relatively faster the aerodynamic power
a smart pitch control strategy for a turbine-generator
can be regulated to limit rotor speed (Muljadi and
system is obtained in time domain by using an adaptive
Butterfield, 2001). Generally, nonlinear strategies are
Back-Propagation (BP) neural network. The backinvolved for power maximization and also for
propagation network is used because it is known that a
frequency regulation analysis (Moutis et al., 2012). A
three layered BP can approximate any nonlinear
PI (proportional integral) controller has been used for
function under any precision (Xu et al., 2012). The
generator and pitch actuators using small-signal
starting weights for the back-propagation network are
analysis in Riziotis et al. (2008). Maximum energy
obtained through an optimum evolutionary algorithm.
capture using PI and fuzzy logic controllers were
proposed in Kamel et al. (2011) and Lin et al. (2011b).
SYSTEM MODEL
Reference (Kamel et al., 2011) uses PI controllers in
battery storage system, while (Lin et al., 2011b)
A block diagram of the wind turbine-generator is
employs a fuzzy interface to estimate the wind speed
given in Fig. 1. The converter circuitry of the doubly
fluctuations. Applications of intelligent techniques for
fed induction generator (DFIG) is located between the
maximizing energy capture have been reported in the
generator stator and rotor terminals. The grid connects
literature in recent times. Pitch control to regulate the
to the stator through transformer and line. A local load
output power of squirrel cage type wind generator
is located at the generator terminal bus. The turbine has
through neural network was reported in Yilmaz and
a pitch control system shown in the block diagram. The
Ozer (2009). The output power leveling by generalized
system model includes the turbine dynamics and its
pitch control has been used in Senjyu et al. (2006).
pitch controller, the DFIG and converter circuitry, the
Also, artificial neural network has been employed for
line and the load.
achieving fast and stable response for a stand-alone
hybrid system (Lin et al., 2011c).
The doubly fed generator and converter model: The
Generally, in aerodynamic modeling and pitch
differential equations relating the voltage current and
control studies the relatively slower rotor dynamics is
4272
�Res. J. Appl. Sci. Eng. Technol., 6(22): 4271-4280, 2013
flux of the stator and rotor circuit of a DFIG expressed
in per unit (pu) quantities along the d-q axes are:
ω
1
Ψ ds − e Ψ qs − R s i ds = v ds
ω0
dV c 1
= [m1 cos α1i da + m1 sin α1i qa + m 2 cos α 2i dr + m 2 sin α 2i qr ]
dt
C
ω0
ω
1
Ψ qs + e Ψ ds − R s i qs = v qs
ω0
(1)
ω0
(5)
The modulation index and phase angle of the two
converter voltages on grid and rotor sides,
(m1 m2 ) and (α1 α 2 ) , relate to the DC capacitor
1
Ψ dr − s Ψ qr − R r i dr = v dr
ω0
voltage V c through:
(2)
1
Ψ qr + s Ψ dr − R s i qr = v qr
ω0
The relationships between the flux linkages and
currents of the stator and rotor circuits are:
Ψ ds = −x s i ds − x m i dr
Ψ qs = −x s i qs − x m i qr
Neglecting the power loss in the capacitor, the power
balance yields the following capacitor voltage equation:
Ψ dr = −x r i dr − x m i ds
Ψ qr = −x r i qr − x m i qs
(3)
E da = mV
1 c cos α1
E qa = mV
1 c sin α1
− Ra
− X
a
X a ω0
+
Ra La
vds − Eqa
v − E
qa
qs
(4)
(6)
Aerodynamics and drive model: The rotor drive train
model for the turbine-generator system in terms of
torsional angle between the two masses and their speed
are expressed as:
ω t =
1
[ Pm − K sθ s ]
2Ht
θs = ωe [ωt − ωr ]
1
[ K sθ s − Pe ]
∆ω r =
2H g
The slip (s) of the machine given in the above
expressions is (ωs − ωr ) / ωs . The input current to the
converter on the grid side, written in terms of d-q
components, is Rahim and Habiballah (2011):
d ida ω0
=
dt iqa La
v dr = m 2V c cos α 2
v qr = m 2V c sin α 2
(7)
The mechanical input power, which is the turbine
output, is:
Here, I a = i da +ji qa , V s = v ds +jv qs and E a = e da +je qa ,
ω 0 is the base frequency. The DC ink capacitor is
located between the two back to back converters.
Pm =
Fig. 2: Mechanical power for various pitch angles at wind speed of 12 m/s
4273
1
γπ R 2V w3C p ( λ , α )
2
(8)
�Res. J. Appl. Sci. Eng. Technol., 6(22): 4271-4280, 2013
Fig. 3: Pitch controller block diagram
Here, V w , γ, λ, C p , α are the wind velocity, tip
speed ratio, density of air, power coefficient and pitch
angle, respectively. C p depends � and α through the
highly non-linear relationship:
116
λ
− 0.4 − 5 e i + 0.0068λ
Cβp ( λ , β ) = 0.5176
λi
1
1
0.035
=
−
λi λ + 0.08α α 3 + 1
−21
The electrical power output term in (7) is given as:
(10)
Plot of the turbine power output against generator
speed for wind speed of 12m/s is given in Fig. 2 for
different pitch angles.
Pitch controller: Figure 3 presents the block diagram
of the pitch controller system. The pitch controller is
actuated between the reference and actual output of the
generator. From (8) and (9) it can be seen that the input
power to the generator can be controlled through
control of pitch angle α. The blade pitch angle depends
on control of the pitch servos. The pitch servo system
model includes a rate limiter, an angle limiter, delay
elements, etc. Conventionally a pitch angle control
system uses PI controllers to generate the appropriate α.
While a more detailed servo modeling may be used, a
first order servo system is sufficient in investigations of
power system studies. In this study, all the components
in the pitch control and servo system are included in the
parameters of the PI controller, dynamic relationships
of which are:
K I ∆P
γ=
α = K P ∆P + γ
(12)
The input u represents the pitch controller gains
and y is the vector of selected output variables.
ADAPTIVE BPNN BASED PITCH
CONTROLLER
(9)
Pe = Ψ qr i dr − Ψ dr i qr
x = f [x ,u ]
y = g [ x ,u ]
(11)
Here, K P and K I are the controller gains to be
determined; ∆P is the input to the controller and α is the
pitch angle.
The composite model of the turbine-generator
system which includes the pitch control device is
expressed through the state model:
A block diagram of the adaptive back-propagation
neural network (BPNN) based pitch controller proposed
in this work is shown in Fig. 4. The core of the
controller consists of two BP networks, one which
produces the nominal weight and nominal control
(u nom ) through training of a large input-output data set.
This part of the controller guarantees a stable nominal
bounded-input bounded output system (Suresh, 2009).
The other BP network is responsible to modify the
network weights in time domain depending on the wind
system transients and generates control Δu. The pitch
controller gains are adaptively tuned as Δu changes. A
differential evolution (DE) optimization technique is
employed to create the input-output data for training the
nominal BPNN network.
The DE optimization
procedure, the back-propagation and adaptive backpropagation methods are presented briefly in the
following.
Differential evolution: In training the neural network
the objective function used is, generally, multimodal.
The gradient technique based algorithms for such
problems may end up producing a local minimum. This
can be avoided by employing a global optimization
procedure based on evolutionary methods. Differential
Evolution (DE) is such a procedure suitable for finding
global minimum (Slowik, 2011). Although initially
used for a single objective function, it has the capability
of handling multi-objective functions and equality as
well as inequality constraints (Qin et al., 2010). The
major steps in a DE algorithm are mutation, crossover
and selection of the population. The final retention is
through a check of fitness on the population. The steps
in the search for the pitch control parameters are
summarized below (Lu et al., 2011).
4274
�Res. J. Appl. Sci. Eng. Technol., 6(22): 4271-4280, 2013
Fig. 4: Adaptive BP neural network-based pitch controller
The various steps involved in the evolutionary
progression are given below:
•
if rand ( 0,1) < CR ,
otherwise
(16)
CR represents the crossover factor.
(13)
•
In the above, N P is total number population and N G
is the number of generations.
Selection: The selection process in DE involves
determining survivor of a generation by comparing
the trial vector with the parents based on fitness in
terms of objective value (14):
Evaluation and location of the best solution: The
best solution among the initial population is
obtained from the objective function:
uk
zk' =
zk
J
=
∑ (ξ
NP
k =1
k
− ξ 0)
2
(14)
Here, ζ k is the damping ratio calculated from
dominant eigenvalues of the linearized system
obtained from (12) for each population k and ζ 0 is
the desired damping ratio. The objective function
in (14) is minimized to provide the optimal
solution satisfying all the constraints.
•
Crossover: This is employed to have a second
generation to enhance the diversity employing a
binomial type crossover given by:
v
uk , j = k , j
zk , j
Initialization: In this step, it is required to specify
the number of control variables or problem
dimension with their corresponding constraints. For
each control parameter, a population is generated
within the search space using the relationship:
zk =
zmin + random( zmax − zmin ); k =
[1, NP ]
•
•
Mutation: The mutation process aims to produce a
new generation of solutions. For every individual k,
we build a donor vector V k from three random
solutions Z r1 , z r2 and Z r3 among the population.
The difference of any two solutions is added to the
third through a mutation factor F given by the
relation:
vk =
zr1 + F zr 2 − zr 3
(15)
•
(
if J uk ≤ zk
)
(17)
otherwise
Stopping criteria: The procedure is continued
until a solution is reached within pre-specified
precision or the maximum number of iteration is
exceeded.
Back propagation neural network: Artificial neural
networks are parallel and distributed information
systems which are used to learn complex systems and
generalize the information learned. The massive
networks comprise of simple neurons and consist of
interconnected elements called nodes. The BackPropagation Neural Network (BPNN) considered in
Fig. 4 has three layers-the Input (I), Hidden (H) and
output (O) layer. The hidden layer comprises of L-1
sub-layers, the input layer being numbered 0 and output
layer L. The data is transferred from input to the output
node through the weight linked hidden neurons using an
activation function. The activation function considered
is a sigmoid having the characteristic:
The limit violation in the mutant vector is checked
through (14):
4275
I)
φ (=
1
∂φ
I ) = σφ ( I )[1 − φ ( I )] (18)
;φ ' (=
−σ I
1+ e
∂x
�Res. J. Appl. Sci. Eng. Technol., 6(22): 4271-4280, 2013
The back-propagation algorithm minimizes the
error function E written as:
=
E (k )
1
=
∑e 2j (k )
2 j
1
∑[Od j (k ) − O j (k )]2
2 j
(19)
Od j is the desired output corresponding to jth
neuron and k represents the iteration count. The change
in weight between the ith and jth node is computed by
using the gradient descent and is written as:
∂E ( k )
∆w ij ( k ) =
−η1
∂w ij
(20)
The gradient term can be evaluated through a chain
rule and the recursive relationship for the weight
updates can be shown to be (Lee, 2008):
wij(l ) (k +=
1) wij(l ) (k ) + η1γ (jl ) (k )Oi(l −1) (k ) + α M [ wij(l ) (k ) − wij(l ) (k − 1)]
(21)
e (j L )φ j' [H j( L ) (k )] for neuron j at output layer L
γ lj (k ) = ' ( L )
φ [H (k )]∑ γ m( l +1) (k )w kjl +1 (k ) j in hidden layer
j j
m
(22)
The computation is accelerated through the
momentum constant α M is the learning rate parameter
η 1 . Note that for i = 0, the weight w 0j corresponds to
the bias at layer l j and H j (L) = O j . The back propagation
algorithm has two different computational directions. In
the forward direction the weights remain unchanged
and the signals are computed at different nodes. The
weights are updated in the backward pass from the error
signal propagated backwards.
Adaptive back-propagation neural network: The
back-propagation network is trained through a large
input-output data set which, in turn, is generated by DE
algorithm. The trained weights are then used to
calculate the nominal value of controller parameters
(u nom ) for a certain operating condition. Depending on
the variation of system outputs from their desired
values, the control parameters are updated as time
advances according to the relation:
=
u u nom + ∆u
∂E c ( k )
∆w ij (t ) =
−η 2
∂w ij
(25)
The weight update is obtained by adding the
change with the nominal value generated by training the
input-output data set and is finally expressed by:
(l )
w=
w ij( l()nom ) + η 2γ (j l ) (t ) y i (t )
ij (t )
(26)
The expression for γ j is similar to that given in
(22). The output can be found from (12) or from online
measurements. The nominal values of w ij are assumed
to remain constant during the process time.
TESTING THE ADAPTIVE PITCH
CONTROLLER
The proposed adaptive pitch controller strategy
was tested on the turbine-generator system of Fig. 1.
The ability of the pitch control strategy to transfer the
wind power under varying wind speed condition was
investigated considering different wind speed
conditions. The nominal power output of the DFIG at a
speed of 12 m/s is 0.9 pu. The parameter values of the
various components are included in the Appendix. The
nominal gains of the pitch controller are considered as
K P = 1, K I = 0. Responses with two types of wind speed
variation are reported here -a step change of wind speed
and random speed change as recorded at a local site.
Figure 5 to 7 show the plots of various responses
for a step change in wind speed from 12 m/s to 11 m/s.
The speed change is affected at t = 1s. In the absence of
pitch control the wind power output at the new speed is
0.82 pu. Figure 5 shows the power input to the
generator (solid line) and power output with and
without adaptive pitch controller (dotted and dashed
(23)
The weight adaptation process is carried out by
minimizing the mean square error E c (t) at each instant
of time expressed as:
(t )
E c=
1
(t ) r (t ) − y (t )
∑ec2 (t ); ec=
2 j
(24)
Here, y(t) is the output vector given in (12) and r(t)
Fig. 5: Generator power input and output variation for a step
is the desired output. The gradient descent method
decrease of wind speed by 1 m/s. The step change is
made at t = 1s
gives the change in weight:
4276
�Res. J. Appl. Sci. Eng. Technol., 6(22): 4271-4280, 2013
Fig. 6: Generator speed variation corresponding to Fig.5 with,
(a) proposed adaptive neural network based pitch
control and (b) nominal pitch control
Fig. 7: DFIG stator current with a step change corresponding
to Fig. 5, with (a) adaptive neural network pitch
control and (b) nominal pitch control
Fig. 8: Variation of PI controller gains following a step
change in wind speed corresponding to Fig. 5
Fig. 9: Normalized wind speed record collected at the local
site
Fig. 10: Wind power and electrical power output with and
without adaptive BPNN pitch control for the random
wind speed variation of Fig. 9
Fig. 11: Generator speed variation for random wind speed
variation of Fig. 9 with, a) adaptive neural network
based pitch control, b) pitch control with nominal
parameters
lines). Examination of Fig. 5 reveals that the generator
Figure 6 and 7 show the variations of the generator
output power follows the wind power very closely with
speed and stator current with the proposed adaptive
the proposed adaptive neural network based control.
pitch control strategy and with nominal control. The
4277
�Res. J. Appl. Sci. Eng. Technol., 6(22): 4271-4280, 2013
Fig. 12: Generator stator current variations with random wind
speed variation with, (a) adaptive neural network
based pitch control and (b) nominal pitch control
damping profile. Figure 8 shows the variation of the
controller gains during the adaptation period. Note that
it is the variation of these parameters which contribute
to the improved system performance.
Figure 9 shows the wind speed data recorded at the
local wind generator station for a period of 1000s. The
actual wind data has been normalized and scaled around
a nominal value of 11 m/s. The transient responses
shown in Fig. 10 to 14 are for the interval of 1s to 10s
of the record of Fig. 9, wind speed kept constant at
11m/s for the first 1s. A comparison of the power input
to the generator (wind power), electrical power output
with the proposed adaptive pitch control and also with
nominal pitch control is presented in Fig. 10. From the
response it can be seen that pitch controller makes the
generator output track the wind power very well.
Records of generator output power, speed and stator
current, shown in Fig. 10 to 12, show that the adaptive
control is very effective in damping the electrical
transients even for this randomly varying wind speed
changes. Figure 13 shows the variation of the controller
gains over the 10s period. Figure 14 shows the variation
of the pitch angle during this period. It can be observed
that the pitch angle change is not large during the
transient period.
CONCLUSION
Fig. 13: Controller parameter variations with the adaptive
control for the randomly changing wind speed
condition of Fig. 9
Fig. 14: Pitch angle variations with the adaptive neural
network control for randomly varying wind speed
changes of Fig. 9. The nominal angle is shown by the
dotted line
figures indicate that the proposed control affects
transfer of wind power to the grid with a very good
This study proposes a novel adaptive pitch
controller for a wind turbine-DFIG system for
transferring wind power to the grid efficiently. Contrary
to conventional offline neural network designs, the
proposed controller adapts the network weights in time
domain depending on system transients. In normal
maximum power transfer problems only the turbine
generator rotor dynamics is considered, while this study
incorporates a detailed model of the generator and its
converter circuitry along with the turbine
aerodynamics. The simulation results show that the
neural network based pitch controller enables the
electric power to follows the mechanical power closely
by varying the blade pitch angle adaptively.
This is achieved with minimum transients in the
generator system. The differential evolution technique
used in training the neural network is an efficient
method to find the global minimum. The proposed
adaptive back-propagation algorithm is computationally
simple.
ACKNOWLEDGEMENT
This research study was done as part of project RG
1202-1 & 1202-2 of the KFUPM research grant. The
support rendered by King Fahd University of Petroleum
and Minerals is gratefully acknowledged.
4278
�Res. J. Appl. Sci. Eng. Technol., 6(22): 4271-4280, 2013
APPENDIX
Lu, Y., J. Zhou, H. Qin, Y. Wang and Y. Zhang, 2011.
Environmental/economic dispatch problem of
Nomenclature and system data:
power system by using an enhanced multiMean wind speed (V W )
12 m/s
Radius of the blades (R)
13.5 m
objective differential evolution algorithm. Energ.
Density of air (γ)
1.225 kg/m2
Convers. Manage., 52: 1175-1183.
Turbine intertia (H t )
2s
Mendis,
N., K.M. Muttaqi, S. Sayeef and S. Perera,
0.5 s
Generator intertia (H g )
2012.
Standalone operation of wind turbine-based
Shaft stiffness (K s )
0.3 p.u/el.rad
0.09241 p.u
Stator reactance (x s )
variable speed generators with maximum power
Stator resistance (R s )
0.00488 p.u
extraction capability. IEEE T. Energ. Convers., 27:
0.2 p.u
Rotor reactance (x r )
822-834.
Rotor resistance (R r )
0.0059 p.u
Mohseni, M., S. Islam and M.A.S. Masoum, 2011.
3.95379 p.u
Mutual inductance (x m )
Grid side converter resistance (R a )
0.001 p.u
Fault ride-through capability enhancement of
0.1 p.u
Grid side converter reactance (L a )
doubly-fed
induction wind generators. IET Renew.
Line resistance
0.02 p.u
Power
Gen.,
5: 368-376.
Line reactance
0.15 p.u
DC link capacitor (C)
1.0 p.u
Moutis, P., S.A. Papathanassiou and N.D.
Hatziargyriou, 2012. Improved load-frequency
REFERENCES
control contribution of variable speed variable
pitch wind generators. Renew. Energ., 48: 514-523.
Amaris, H. and M. Alonso, 2011. Coordinated reactive
Muljadi, E. and C.P. Butterfield, 2001. Pitch-controlled
power management in power networks with wind
variable-speed wind turbine generation. IEEE T.
turbines and FACTS devices. Energ. Convers.
Ind. Appl., 37: 240-246.
Manage., 52: 2575-2586.
Muyeen, S.M., A. Al-Durra and J. Tamura, 2011.
Hu, S., X. Lin, Y. Kang and X. Zou, 2011. An
Variable speed wind turbine generator system with
improved low-voltage ride-through control strategy
current controlled voltage source inverter. Energ.
of doubly fed induction generator during grid
Convers. Manage., 52: 2688-2694.
faults. IEEE T. Power Electr., 26: 3653-3665.
Qin, H., J. Zhou, Y. Lu, Y. Wang and Y. Zhang, 2010.
Ibrahim, A.O., T.H. Nguyen, D.C. Lee and S.C. Kim,
Multi-objective differential evolution with adaptive
2011. A fault ride-through technique of DFIG wind
Cauchy mutation for short-term multi-objective
turbine systems using dynamic voltage restorers.
optimal hydro-thermal scheduling. Energ. Convers.
IEEE T. Energ. Convers., 26: 871-882.
Manage., 51: 788-794.
Johnson, K.E., L.Y. Pao, M.J. Balas and L.J. Fingersh,
Qu, L. and W. Qiao, 2011. Constant power control of
2006. Control of variable speed wind turbines:
DFIG wind turbines with super capacitor energy
Standard and adaptive techniques for maximizing
storage. IEEE T. Ind. Appl., 47: 359-367.
energy capture. IEEE Control Syst. Mag., 26(3):
Rahim, A.H.M.A. and I.O. Habiballah, 2011. DFIG
70-81.
rotor voltage control for system dynamic
Kamel, R.M., A. Chaouachi and K. Nagasaka, 2011.
performance enhancement. Electr. Pow. Syst. Res.,
Enhancement of micro-grid performance during
81: 503-509.
islanding mode using storage batteries and new
Rahim,
A.H.M.A. and E.P. Nowicki, 2012.
fuzzy logic pitch angle controller. Energ. Convers.
Supercapacitor
energy storage system for fault
Manage., 52: 2204-2216.
ride-through
of
a DFIG wind generation system.
Lee, T.L., 2008. Back-propagation neural network for
Energ.
Convers.
Manage.,
59: 96-102.
the prediction of the short-term storm surge in
Riziotis,
V.A.,
E.S.
Politis,
S.G.
Voutsinas and P.K.
Taichung harbor, Taiwan. Eng. Appl. Artif. Intell.,
Chaviaropoulos,
2008.
Stability
analysis of pitch21: 63-72.
regulated,
variable-speed
wind
turbines
in closed
Lin, W.M., C.M. Hong and F.S. Cheng, 2011a. Design
loop
operation
using
a
linear
Eigen
value
approach.
of intelligent controllers for wind generation
Wind Energ., 11: 517-535.
system with sensorless maximum wind energy
Senjyu,
T., R. Sakamoto, N. Urasaki, T. Funabashi, H.
control. Energ. Convers. Manage., 52: 1086-1096.
Fujita
and H. Sekine, 2006. Output power leveling
Lin, W.M., C.M. Hong, T.C. Ou and T.M. Chiu, 2011b.
of
wind
turbine generator for all operating regions
Hybrid intelligent control of PMSG wind
by
pitch
angle control. IEEE T. Energ. Convers.,
generation system using pitch angle control with
21: 467-475.
RBFN. Energ. Convers. Manage., 52: 1244-1251.
Lin, W.M., C.M. Hong and C.H. Chen, 2011c. NeuralShi, J., Y. Tang, Y. Xia, L. Ren and J. Li, 2011. SMES
network-based MPPT control of a stand-alone
based excitation system for doubly-fed induction
hybrid power generation system. IEEE T. Power
generator in wind power application. IEEE T.
Electr., 26: 3571-3581.
Appl. Supercon., 21: 1105-1108.
4279
�Res. J. Appl. Sci. Eng. Technol., 6(22): 4271-4280, 2013
Slowik, A., 2011. Application of an adaptive
differential evolution algorithm with multiple trial
vectors to artificial neural network training. IEEE
T. Ind. Electr., 58: 3160-3167.
Suresh, S., 2009. Adaptive neural flight control system
for helicopter. Proceeding of the IEEE Symposium
on Computational Intelligence for Security and
Defense Applications, pp: 1-8.
Vinothkumar, K. and M.P. Selvan, 2011. Novel scheme
for enhancement of fault ride-through capability of
doubly fed induction generator based wind farms.
Energ. Convers. Manage., 52: 2651-2658.
Xu, T., X. Liu and X. Yang, 2012. A novel approach
for ship trajectory online prediction using BP
neural network algorithm. Adv. Inform. Sci. Serv.
Sci., 4: 271-277.
Yilmaz, A.S. and Z. Ozer, 2009. Pitch angle control in
wind turbines above the rated wind speed by multilayer perceptron and radial basis function neural
networks. Expert Syst. Appl., 36: 9767-9775.
Yunus, A.M.S., M.A.S. Masoum and A. Abu-Siada,
2012. Application of SMES to enhance the
dynamic performance of DFIG during voltage sag
and swell. IEEE T. Appl. Supercon., 22: 5702009.
Zhang, Z.S., Y.Z. Sun, J. Lin and G.J. Li, 2012.
Coordinated frequency regulation by doubly fed
induction generator-based wind power plants. IET
Renew. Power Gen., 6: 38-47.
4280
�
 Syed Ahmed Raza Naqvi
Syed Ahmed Raza Naqvi