GUIDELINE FOR PREPARATION
Proceedings of the 10th International Ship Stability Workshop
Probabilistic Assessment of Ship Stability Based on the Concept of
Critical Wave Groups
Nikos Themelis & Kostas J. Spyrou
National Technical University of Athens, Greece
ABSTRACT
A versatile methodology for the probabilistic assessment of ship stability is discussed through
application to a post-panamax containership, assumed to operate on a North Atlantic route in days
of unfavourable weather. Some technical implementation issues are discussed concerning the effect
of initial conditions on the calculated probability figures, on the basis of a first-principles approach.
KEYWORDS
Ship; stability; probability; wave group; dynamics; containership; initial conditions
INTRODUCTION
The development
of an all-purpose
probabilistic methodology of ship stability
assessment is receiving recently significant
international attention, perhaps due to the
central role that it is destined to play in an
anticipated risk-based framework of ship
design and operation. A physics-based
methodology for probabilistic
stability
assessment has been put forward recently by
the authors (Themelis & Spyrou 2007).
Calculation effort targets the probability to
encounter specific wave groups that incite roll
dynamic responses of unacceptable intensity,
condition that is loosely described in the
current context as practical manifestation of
“instability”.
The present paper is basically a sequel along
this line of research and its purpose is dual:
firstly, to demonstrate an application of the
methodology for the “short-term” assessment
of a post panamax containership on a specific
voyage from Hamburg to New York. Days of
“bad weather” had been identified in advance
on the basis of a hindcast study. Three modes
of instability, namely beam-seas resonance,
parametric rolling and pure-loss of stability, are
addressed. Secondly, to undertake a theoretical
investigation concerning the quantitative effect
produced by a probabilistic consideration of
initial conditions, upon the specification of the
critical wave groups, and eventually on the
overall probability figures. The matter is a
theoretically demanding one and here only a
preliminary (yet systematic) study will be
presented.
THE CONTAINERSHIP AND THE ROUTE
Basic
data
concerning
the
assessed
containership are shown in Table 1.
Unfortunately, no information of her bilge
keels was available, so a bare hull was only
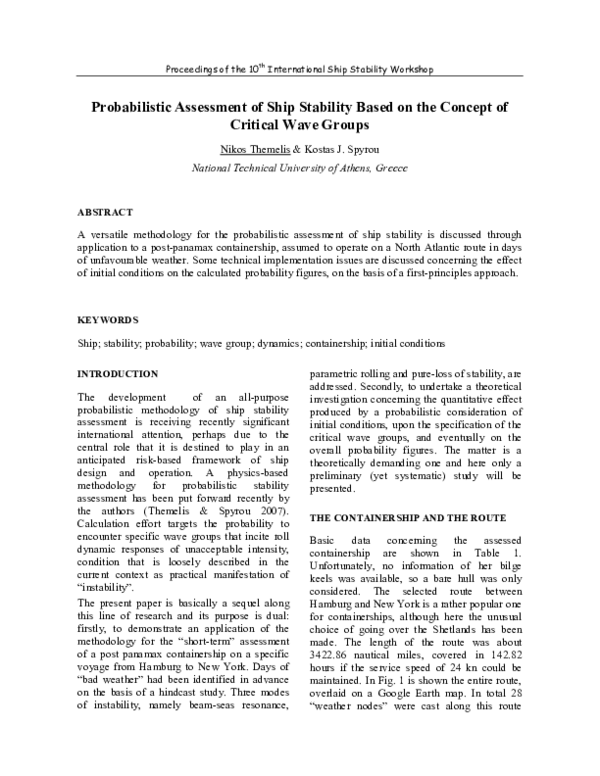
considered. The selected route between
Hamburg and New York is a rather popular one
for containerships, although here the unusual
choice of going over the Shetlands has been
made. The length of the route was about
3422.86 nautical miles, covered in 142.82
hours if the service speed of 24 kn could be
maintained. In Fig. 1 is shown the entire route,
overlaid on a Google Earth map. In total 28
“weather nodes” were cast along this route
�GUIDELINE FOR PREPARATION
Proceedings of the 10th International Ship Stability Workshop
(Fig. 2). Their density was decided by ensuring
that wave characteristics, in terms of significant
wave height H S and peak period TP , do not
change significantly while the ship is still
inside the influence area of any particular node.
Table 1: Ship data
LBP (m)
264.4 m
Cb
0.600
B (m)
40
T0 (s)
39.12
D (m)
24.3
KG(m)
18,79
Td (m)
13.97
GM (m)
0.61
VS (kn)
24
TEU
5048
The variation of H S , TP and of the mean wave
direction ΘM , in the vicinity of the defined
route, are presented in Figs. 3 to 5.
The percentage of the ship’s scaled time of
exposure to beam, head and following seas per
node had then to be worked out on the basis of
ship heading (as defined by the route) and the
distribution of mean direction of the local wave
field around each node, weighted by the time
spent in its area of influence (Fig. 6).
H S [m]
12
10
8
6
4
2
0
1
3
5
7
9
11
13
15
17
19
21
23
25
27
weather node
Fig. 3 : Variation of significant wave height along the route.
Fig. 1 : Hamburg - New York route.
TP
17.5
[s]
15.5
13.5
11.5
9.5
7.5
5.5
1
3
5
7
9
11
13
15
17
19
21
23
25
27
17
19
21
23
25
27
weather node
Fig. 4 : Variation of peak period.
Fig. 2 : Part of route showing weather nodes and their
areas of influence.
Wave hindcast data for the North Atlantic
referring to the period between 1990 and 1999
has been consulted (Behrens 2006). As the
intention was to perform a “short-term”
assessment, the data was searched in order to
find specific days of bad weather at places near
to the ship’s route. It was found that waves of
significant height exceeding 10 m should have
been realised in some part of the route, in the
period between 13/01/1991 and 18/01/1991.
ΘΜ [deg.]
340
300
260
220
180
140
1
3
5
7
9
11
13
15
weather node
Fig. 5 : Variation of mean wave direction (00 waves coming
from North, 900 East).
�GUIDELINE FOR PREPARATION
Proceedings of the 10th International Ship Stability Workshop
Shift- of-cargo threshold
Percentage of exposure
7.00%
6.00%
5.00%
Following-Seas
4.00%
Head-Seas
3.00%
2.00%
Beam-Seas
1.00%
0.00%
1
3
5
7
9
11
13
15
17
19
21
-1.00%
weather node
Fig. 6 : Exposure to beam, head and following seas.
NORMS OF UNSAFE RESPONSE
These norms are defined respectively as: a
critical roll angle for the ship and a critical
acceleration for the cargo.
23
This was identified by the critical transverse
acceleration that could result in damage of the
containers’ lashings. The acceleration due to
rolling motion has been estimated for tiers of 4,
5 and 6 TEUs, placed on the deck. The relevant
calculations have been carried out according to
the Cargo Securing Manual (DNV 2002).
Specifically, the sufficiency of lashings’ in
terms of transverse sliding and tipping of the
tier has been checked. The lashing arrangement
is shown in Fig. 8. In Table 2 have been
collected the principal parameters that enter
into the calculations. The mass per unit of
TEUs is consistent with the loading condition
for the specified metacentric height.
“Capsize” threshold
To determine a roll angle as threshold of
“capsize” the principle of the weather criterion
was adopted. The critical angle should then be
the minor of: the angle of vanishing
stability ϕc = 520 ; the flooding angle ϕ f and the
prescribed value ϕa = 500 . The flooding angle
was assumed to correspond to the least
transverse inclination (with submerged volume
preserved) at which the highest point of a hatch
coaming is immersed. According to the
drawings, hatch coamings rise 1.7 m above the
deck. A rendered view of the hull (with some
key deck structures) inclined to that angle is
shown schematically in Fig. 7. From
hydrostatic calculations it should be ϕ f = 350 .
CG
z
d
lashing 2
lashing 1
deck
b
Fig. 8 : TEUs in a tier and their lashing arrangement.
2
α y [m/s ]
10
8
Transverse Tipping
6
4
Transverse Sliding
2
4
5
number of TEUs in tiers
Fig. 7 : Critical heel angle for immersion of hatch coaming.
Fig. 9 : Critical transverse accelerations for sliding and
tipping for three cases of cargo stowage.
6
�GUIDELINE FOR PREPARATION
Proceedings of the 10th International Ship Stability Workshop
Table 2 : Cargo and lashings characteristics
Total number of
TEUs: 5048
Total weight of TEUs:
51100t
Cargo mass: (4/5/6
TEUs in tier)
m = 40.49/ 50.61/ 60.74 t
Most severe
position of trailer:
y=18.28 m
z=24.3 m (from base line)
Centre of gravity
above deck:
zd = 4.88/ 6.10/ 7.32 m
lever-arm of
tipping:
b = 1.219 m
Coefficient of
friction:
Steel – steel: µ = 0.1
Lashing
arrangement:
2 chains with MSL = 100
kN on each side,
symmetrical
vertical securing angle per
lashing: 43°/60°
The most critical condition was identified to
correspond to transverse sliding for a tier of 6
TEUs (Fig.9). The specific value of this critical
acceleration was calculated as a y = 4.02 m/s 2 .
critical wave groups, referring respectively to
ship and trailer responses. We have to remind
that no bilge keels have been considered
Nonlinear Froude-Krylov force has been
included in the calculation.
Fig. 10 : 3D plots mesh generation of containership by
SWAN2.
CRITICAL WAVES
Critical wave groups have been specified for
the following types of instability: a) beam-sea
resonance, b) parametric rolling in longitudinal
seas; and c) pure-loss of stability. Their
characteristics were found from numerical
simulations, using the well-known panel code
SWAN2 (2002). Fig. 10 shows characteristic
3D plots mesh generation of the containership,
as obtained with SWAN2.
φ (deg)
40
30
20
10
0
0
10
20
30
40
50
60
70
-10
-20
-30
-40
Beam-seas resonance
To determine the critical combinations of wave
height, period and group run length that could
generate exceedence of a stability norm,
deterministic numerical simulations have been
carried out. The ship was assumed with no
initial rolling. The practical range of wave
periods that could be realised in the specific sea
region has been scanned. Fig. 11 presents a
rolling response to one of the identified as
critical wave groups. Fig. 12 and Fig. 13
present the key characteristics of identified
t (s)
Fig. 11 : Response in beam waves for T=15.5 s and H =9.6 m.
Head-seas parametric rolling
For the assumed speed of VS = 24 kn the ship
could be prone to head-seas parametric rolling.
Specifically, the principal mode of parametric
instability can be realised when the wavelength
obtains values likes those shown in Fig. 14.
The required wavelengths are extremely long.
An uncertain initial roll disturbance range was
�GUIDELINE FOR PREPARATION
Proceedings of the 10th International Ship Stability Workshop
considered in order to realize growth of roll
amplitude. Up to a sequence of 8 wave
encounters has been examined; because having
more waves in a group is of truly negligible
probability when the waves are high. The
characteristics of critical wave groups were
determined
from
repetitive
numerical
simulations, taking record whenever roll
growth up to the critical norm was realised,
within the allowed number of wave encounters.
An example is shown in Fig. 15. The variation
of critical height and run length in the vicinity
of exact principal resonance can be seen in Fig.
16.
4.50
4.00
3.50
λ/L
3.00
2.50
0.7
0.8
0.9
1
1.1
1.2
α
Fig. 14 : Critical wavelengths for head-seas parametric
rolling (principal resonance).
φ (deg)
40
30
20
18
10
0
0
16
10
20
30
40
50
60
70
80
90
100
-10
n=2
-20
14
-30
H cr (m)
-40
t (s)
n=3
12
Fig. 15 : Parametric roll growth in head waves 80 % off
principal resonance and for H=14 m.
n=4
n =5
10
n=6
20
8
9.5
12.5
15.5
18.5
T(s)
α= 0.7
15
Fig. 12 : Critical wave groups of containership with
0.8
Hcr (m)
reference to the limiting roll angle (ship).
0.9
1
10
12
5
3
4
5
6
7
8
7
8
n (number of waves)
11
n=2
20
10
Hcr (m)
n =3
9
15
n=4
8
Hcr (m)
1.2
α= 1
n=5
10
7
6
9.5
n =6
1.1
5
12.5
15.5
T(s)
18.5
3
4
5
6
n (number of waves)
Fig. 13 : Critical wave groups of containership for the
Fig. 16 : Required wave height for reaching the critical roll
limiting transverse acceleration (cargo).
angle form an initial roll disturbance “around” 4.50.
�GUIDELINE FOR PREPARATION
Proceedings of the 10th International Ship Stability Workshop
Pure – loss
As the panel code is not suitable for use at very
low frequencies of encounter, an analytical
criterion of pure loss of stability was used. The
key idea exploited was that the critical
fluctuation of GZ could be identified on the
basis of the following condition: the time of
experiencing negative restoring in the vicinity
of a crest should be, at least, equal to the time
that is necessary for developing capsizal
inclination, assuming an initial roll disturbance.
In Figure 17 is shown the calculated critical
fluctuation of GM hcr for various values of
λ L . The respective critical wave heights were
calculated taking into account the restoring
variation on the waves using Maxsurf.
However their values were extremely high and
so had very small probability to be met.
3.60
3.40
3.20
3.00
φο=0-3 deg.
φο=3-6 deg.
hcr 2.80
2.60
2.40
2.20
2.00
0.85
0.9
0.95
λ/L
1
1.05
1.1
Fig. 17 : Critical values of h for pure-loss-of-stability.
CALCULATION OF PROBABILITIES
For the background theory of wave groups and
a brief description of the joint and marginal
probability density functions that are necessary
for the calculations one may consult for
example Themelis and Spyrou (2007).
Briefly, the sequence of waves that forms the
wave group is treated as a Markov chain. The
theory is based on Kimura (1980) as improved
later by Battjes & Van Vledder (1984). The
necessary probability calculations exploit
spectral information of the wave field; i.e. there
is no need of using direct time-series results.
The JONSWAP spectrum was assumed in
order to expedite the calculation procedure
In the presentation of the results we have
introduced the concept of “critical time ratio”.
Rather than using probability figures that refer
essentially to number of wave encounters
irrespectively of their periods, we considered as
more meaningful to convert probabilities of
encountering wave groups to the scaled time
ratio of experiencing these wave groups
according to the formula ti =
ti
T
= Pi i where
ttot
Tm
Pi is the calculated probability of a wave group
i having wave period around the value Ti ; ttot
is the duration of the part of the voyage inside
the rectangle of the considered node and Tm is
the mean spectral period associated with the
same node. The obtained results presents the
scaled critical time per node for each type of
instability along the route, thus one can easily
deduce which type of instability is more likely
to occur at any specific stage of the journey,
hence providing useful information for weather
routeing.
In Fig. 18 are overlaid the three obtained
“critical time ratio” curves, for the ship and her
cargo respectively. In Table 3 are presented the
total probabilities and critical time ratios for the
complete voyage taking into account the
percentage of exposure to beam, head and
following seas.
It could be perhaps enlightening if we
presented an example of the calculation of the
probability of “instability” with reference to a
specific part of the route. Take for example
node 5 whereabouts the time spent is 3.83 hr.
The sea state is characterized by H S = 7.6m
and TP = 16.4 s . The probability of critical
waves for that node and for cargo shifting is
7.23 x 10-5. For the assumed speed, the mean
encounter wave period is 12.66 s and the
number of waves encountered by the ship in
one hour should be 13777(s)/12.66(s)=1089.
Hence the probability of instability for this
time of exposure should be 7.88% which is
quite a high value (one recalls here of course
�GUIDELINE FOR PREPARATION
Proceedings of the 10th International Ship Stability Workshop
that the bilge-keels were not considered, which
would reduce this number substantially).
ti
cargo
1.0E+00
beam seas resonance
1.0E-10
head seas
parametric
rolling
1.0E-20
1.0E-30
1.0E-40
1
3
5
7
9
11
13
15
17
19
21
23
nodes
ti
ship
Setting up the problem and methodology
1.0E+00
T
beam seas resonance
head seas
parametric
rolling
1.0E-20
pure loss
1.0E-40
1.0E-60
1
3
5
7
9
11
13
15
17
19
21
nodes
Fig. 18 : Collective view of “critical time ratio” diagrams
for cargo (upper) and for ship (lower).
Table 3 Summed probability of instability and associated
“critical time”
Ship: ( ϕ > 35 )
Cargo: ( a y > 4 m/s2)
0
deduced probability figure; in which case, one
should better treat as probabilistic quantity the
initial state, integrating it thereafter with the
subsequent calculation of the probability of
exceedence of the stability norm. Apparently,
the probability to be found at a certain
neighbourhood of the system’s state space is
connected to the weather. Better understanding
of the role of initial conditions in the
calculation of the probability of instability
would be very desirable.
Pi
ti
3.33E-04
3.95E-05
9.38E-04
1.11E-04
23
As any given state z 0 = z (τ 0 ) , z& (τ 0 ) of a
dynamical system can be regarded as initial
condition for any state zi that belongs to z0’s
later time evolution, a system’s safe basin
could be realistically taken as the appropriate
continuum of initial conditions that should be
targeted for probabilistic treatment. Given a
ship and a sea state, one could sensibly assume
that each infinitesimal subregion dA within it
could be associated with a probability of being
“visited” at the moment when the wave group
excitation is applied. Let us define the
encounter of wave group with the condition of
being at the trough of the first wave.
EFFECT OF INITIAL CONDITIONS
As becomes obvious, a significant element of
the current methodology is the identification of
the complete set of critical wave groups by
numerical or analytical techniques. Whichever
route is selected however, an initial state of the
system should be assumed because the
assessment is based on transient response. The
simplest scenario of course is to assume that
the ship is initially upright with zero roll
velocity and in vertical equilibrium condition
when approached by the wave group. This idea
has some background from ship roll dynamics
investigations (Rainey and Thomson 1991).
However, a question could be raised whether
this assumption is really critical for the
Fig. 19 : Phase-plane trajectories and basin boundary of
conservative nonlinear oscillator.
Lines of constant potential-plus-kinematic
energy of a simple freely oscillating
Hamiltonian nonlinear oscillator are shown in
Fig. 19. As known, these are approximately
cyclic at small energy levels (i.e. linear
dynamics), they become elliptic for higher
energy and eventually, as basin boundary, they
�GUIDELINE FOR PREPARATION
Proceedings of the 10th International Ship Stability Workshop
become hyperbolic. To simplify the calculation
process, let us in the first instance confine
ourselves within linear oscillator dynamics
using standard symbols:
&&
z + 2ζ z& + z = f sin ( Ωτ )
(1)
Of course a linear oscillator does not present a
basin boundary. However, one could consider,
instead, lines of constant energy. A grid of
initial conditions may then be created, up to the
energy level represented by inclination zcr that
has been identified as critical (Fig. 20).
this kind are not dealt with for the first time,
see for example McCue & Troesch (2005).
According to the current problem setup, in
principle a multivariate pdf is required of
z (τ 0 ) , z& (τ 0 ) , taking into account the condition
that defines wave group’s encounter. For
example, seek the distribution of roll’s initial
conditions at the trough before meeting the
wave group, p z , z&, ζ& ( 0 ) ζ&& > 0 . Such an
(
)
implementation
is
currently
under
development. At this instance we have
considered however only the joint pdf P ( z , z& ) .
Then, under the assumption of stationary
process, the roll angle and velocity are
uncorrelated in which case their joint pdf is
much simplified:
Pzz& ( z , z& ) = Pz ( z ) Pz& ( z& )
(2)
The response spectrum can then be derived in
the usual manner for linear processes:
S z (ω ) = F (ω )
2
Sζ (ω )
(3)
The probability density function of the
response will be Gaussian (x can be z or z& ):
Px ( x ) =
Fig. 20 : Grid of initial conditions.
For each initial state, i.e. a point of the grid, the
critical forcing f cr can be calculated
analytically from eq. (1), using as parameter
the considered number n of cycles of periodic
excitation. Then, given the assumption of a
(
“Gaussian sea”, the probability P Cij z ij
)
to
encounter these wave groups for some wave
spectrum Sζ (represented by H S and TP ) is
straightforward on the basis of the procedure
described in Themelis & Spyrou (2007).
In the ensuing step the probabilistic treatment
of initial conditions is introduced. Problems of
1
σ x 2π
x
−0.5
σ
e x
2
(4)
where the standard deviation is:
∞
σ x2 = ∫ S x (ω ) d ω
(5)
0
The probability for the initial roll angle and
velocity to be found in the neighbourhood of
state (i, j ) is:
( ) ∫ ∫ Pzz& ( z, z& )dzdz&
P z ij =
zi z& j
(6)
�GUIDELINE FOR PREPARATION
Proceedings of the 10th International Ship Stability Workshop
Assuming independence, the total probability
can be derived by multiplying the probabilities
(
)
of wave groups P Cij z ij with the probability
of the initial conditions P ( zij ) and then
summing up:
∑∑ P(i, j ) = ∑∑ P ( Cij zij ) × P ( zij )
i
j
i
(7)
j
Application
However the main purpose of this analysis was
to understand whether a probabilistic
distribution of the initial conditions affects
significantly the value of total probability, in
comparison to an assumption of quiescent
initial state. The result of parametric studies
based on the total probability according to the
two calculation procedures, are shown in Fig.
23, firstly with respect to H S and secondly to
TP . It is interesting that in the logarithmic scale
the difference shows really small.
For an initial application the scaled critical
angle was set at 0.5 , the natural roll period T0
at 15 s and the damping ratio ζ at 0.05 . The
grid density was kept constant in polar
coordinates.
The domain of initial conditions was
parameterised by the radius r of the circle
within which the grid was built. As it is
obvious, r reflects up to how “far” from the
quiescent state initial conditions have been
considered. Furthermore, the ratio r / zcr
should present an interesting relationship with
the calculated total probability value.
For each initial condition we have determined
critical wave groups with run lengths
successively n = 2,3,...8 , under the assumption
of a JONSWAP spectrum. In Fig. 21 can be
observed the calculated variation of the critical
(
)
wave group probability P Cij zij for the case
where H S = 7 m and TP = 15 s for different
initial conditions. Probabilities of the initial
conditions P ( zij ) are shown in Fig. 22.
Fig. 22 : Probability distribution of initial conditions within
the circle for H S = 7 m and TP = 15 s . The lower picture
shows details in the region of smaller probability values.
Fig. 21: Probabilities of critical wave groups from different
initial conditions. H S = 7 m and TP = 15 s .
The “quiescent case” presents always lower
values and the difference seems to grow at
larger H S . Besides, when TP is varied, the
probabilities for the joint distribution case are
also always larger; however the difference
appears then to be greater. In order to have a
more enlightening view of these results, we
�GUIDELINE FOR PREPARATION
Proceedings of the 10th International Ship Stability Workshop
calculated the difference in probability ( dP )
between the two cases, for various values of
r / zcr . Results are collected in Fig. 24. Positive
difference means here larger value for the
“joint” case.
We can conclude that there is an increasing
trend in the difference as H S is raised. Only
when a small grid radius has been assumed
( r / zcr = 0.2 ) this trend is reversed.
r / zcr on
A final aspect is the effect of
probability. We found that, as r / zcr ≥ 0.4 the
size of the area seems not to affect significantly
the value of probability, for all sea states
examined. Furthermore, the lower the sea state
the less the difference produced from r / zcr .
dP
T P = 15 s
25.00%
Furthermore, for low H S the two cases seem
to produce quite comparable results ( ±5% ) .
Variation of TP reveals bigger differences at
the lower range of periods; while for the
assumed value of H S the probability
corresponding to the joint case is always
higher, with the exception again of the small
grid radius case.
15.00%
5.00%
4.00
-5.00%
4.50
5.00
5.50
6.00
6.50
7.00
7.50
8.00
r/zcr = 0.2
0.4
-15.00%
0.6
0.8
-25.00%
1
HS (m)
dP
HS = 7 (m)
50.00%
T P = 15 s
P
r/zcr = 0.2
40.00%
0.4
0.6
1.00E-04
30.00%
0.8
1
20.00%
10.00%
1.00E-08
0.00%
-10.00%
probabilistic
-20.00%
12.00
1.00E-12
4.00
13.00
upright
4.50
5.00
5.50
6.00
6.50
7.00
7.50
8.00
8.50
14.00
15.00
16.00
17.00
18.00
19.00
T P (s)
9.00
HS (m)
Fig. 24 : Difference in probabilities as the ratio r / zcr is
varied.
P
HS = 7 (m)
1.00E-04
CONCLUSION
1.00E-06
1.00E-08
12.00
probabilistic
upright
13.00
14.00
15.00
16.00
17.00
18.00
19.00
T P (s)
Fig. 23 : Total probabilities for the “quiescent” and for the
“joint” case ( r / zcr = 1 ).
Practical application of a probabilistic
methodology of ship stability assessment has
been presented for a modern containership.
A preliminary study of the effect of initial
conditions on the probability of instability that
is based on a linear oscillator concept for the
process that generates these initial conditions
has been undertaken. The result indicates that
the degree of influence of initial conditions on
the overall probability figure depends mainly
on the severity of the sea state. However it is
notable that, in a logarithmic scale, the
�GUIDELINE FOR PREPARATION
Proceedings of the 10th International Ship Stability Workshop
difference appears insignificant. It prevails
therefore that beyond the purely technical part
of such an investigation, it is essential to clarify
what is the “right” scale that one should use:
for basing decisions as well as for assessing the
importance of several factors that play some
role in the modelled physical process.
Behrens, A., 2006, “Environmental data: Inventory and new
data sets”, Safedor S.P. 2.3.2 Deliverable Report.
Det Norske Veritas, 2002, Cargo Securing Manual, Model
manual, Version 3.1, Oslo.
Kimura, A., 1980, “Statistical properties of random wave
groups”, In Proceedings of the 17th International
Conference on Coastal Conference, Sydney, Australia, pp.
ACKNOWLEDGMENTS
The first part of this work (assessment of
containership) was carried out in the context of the
SAFEDOR integrated project that is funded by the
European Community.
The authors acknowledge with thanks some useful
discussion with Dr. V. Belenky concerning the
second part of the paper.
2955 – 2973.
McCue, L. and Troesch, A. 2005, Probabilistic determination
of critical wave height for a multi-degree of freedom
capsize model. Ocean Engineering, 32, pp. 1608-1622.
Rainey, R.C.T and Thompson, J.M.T., 1991, “Transient capsize
diagram – a new method of quantifying stability in
waves.” Journal of Ship Research, 41, pp. 58–62.
SWAN2, 2002, Boston Marine Consulting, Ship Flow
REFERENCES
Simulation in Calm Water and in Waves. User Manual.
Battjes, J.A & van Vledder, G.Ph., 1984, “Verification of
Themelis, N. & Spyrou, K., 2007, “Probabilistic assessment of
Kimura’s theory for wave group statistics”, In Proceedings
ship stability”, SNAME Annual Meeting, Fort Lauderdale,
of the 10th ICCE, pp. 642- 648.
Florida, November.
View publication stats
�
 Nikos Themelis
Nikos Themelis