2010 Fourth Pacific-Rim Symposium on Image and Video Technology
Object recognition in 3D scenes with occlusions and clutter by Hough voting
Luigi Di Stefano
DEIS-ARCES
University of Bologna
Bologna, Italy
luigi.distefano@unibo.it
Federico Tombari
DEIS-ARCES
University of Bologna
Bologna, Italy
federico.tombari@unibo.it
correspondences caused by these nuisance factors, so as
to determine a subset that can be reliably deployed for
detecting objects and estimating their poses. State-of-theart approaches are mainly two. On one side, starting from
a seed feature correspondence, correspondence grouping is
carried out by iteratively aggregating those correspondences
that satisfy geometric consistency constraints [19], [20]. The
other main approach relies on clustering pose hypotheses in
a 6-dimensional pose space, each correspondence providing
a pose hypothesis (i.e. rotation and translation) based on
the local Reference Frame (RF) associated with the two
corresponding features [1], [3]. Once reliable feature correspondences have been selected, by either enforcement of
geometric consistency or clustering, a final processing stage
based on Absolute Orientation [21] and/or Iterative Closest
Point (ICP) [22], can be performed to further validate the
selected subset of correspondences and refine pose estimation.
In this work we propose a novel approach for object
recognition in 3D scenes that can withstand clutter and
occlusions and seamlessly allows for recognition of multiple
instances of the model to be found. The proposed approach
deploys 3D feature detection and description to compute
a set of correspondences between the 3D model and the
current scene. In addition, each feature point is associated
with its relative position with respect to the centroid of
the model, so that each corresponding scene feature can
cast a vote in a 3D Hough space to accumulate evidence
for possible centroid position(s) in the current scene. This
enables simultaneous voting of all feature correspondences
within a single tiny 3-dimensional Hough space. To correctly
cast votes according to the actual pose(s) of the object(s)
sought for, we rely on the local RFs associated with each
pair of corresponding features. Next we briefly review the
the state-of-the-art concerning the Hough Transform, while
in Section III we describe the proposed 3D Hough voting
approach. Then, we present experiments on 3D scenes
characterized by significant clutter and occlusions acquired
by means of a laser scanner and two different stereo vision
setups. The proposed experiments show how the proposed
approach can be usefully deployed to perform 3D object
recognition and allow to assess in quantitative terms how it
Abstract—In this work we propose a novel Hough voting
approach for the detection of free-form shapes in a 3D space,
to be used for object recognition tasks in 3D scenes with
a significant degree of occlusion and clutter. The proposed
method relies on matching 3D features to accumulate evidence
of the presence of the objects being sought in a 3D Hough
space. We validate our proposal by presenting a quantitative
experimental comparison with state-of-the-art methods as well
as by showing how our method enables 3D object recognition
from real-time stereo data.
Keywords-Hough voting; 3D object recognition; surface
matching;
I. I NTRODUCTION
Increasing availability of low-cost 3D sensors promotes
research toward intelligent processing of 3D information.
In this scenario, a major research topic concerns 3D object
recognition, that aims at detecting the presence and estimating the pose of particular objects, represented in the form
of 3D models, in 3D data acquired by a sensor such as
a laser scanner, a Time-of-Flight camera, a stereo camera.
Though a lot of effort has been devoted to the design
of robust and discriminative 3D features aimed at reliably
determining correspondences between 3D point sets [1], [2],
[3], [4], [5], [6], [7], [8], [9], [10], with scenes characterized
by clutter and occlusions relatively few approaches are
available for the task of detecting an object and estimating
its pose based on feature correspondences. Indeed, many
approaches for 3D object recognition are aimed at object
retrieval in model databases and hence can not deal with
clutter and occlusion. Besides, 3D object retrieval methods
usually do not estimate the 3D pose of the object nor can
deal with the presence of multiple instances of a given
model. This is the case of Bag-of-3D Features methods
[11], [12], [13], approaches based on the Representative
descriptor method [8] and probabilistic techniques such as
e.g. [14] (see [15] for a survey). On the other hand, the
well-known Geometric Hashing technique can in principle
be generalized seamlessly to handle 3D data [16], although
it hardly withstands a significant degree of clutter [17], [18].
Instead, methods specifically designed for the task of
object recognition in 3D scenes with clutter and occlusions should basically allow for discarding wrong feature
978-0-7695-4285-0/10 $26.00 © 2010 IEEE
DOI 10.1109/PSIVT.2010.65
349
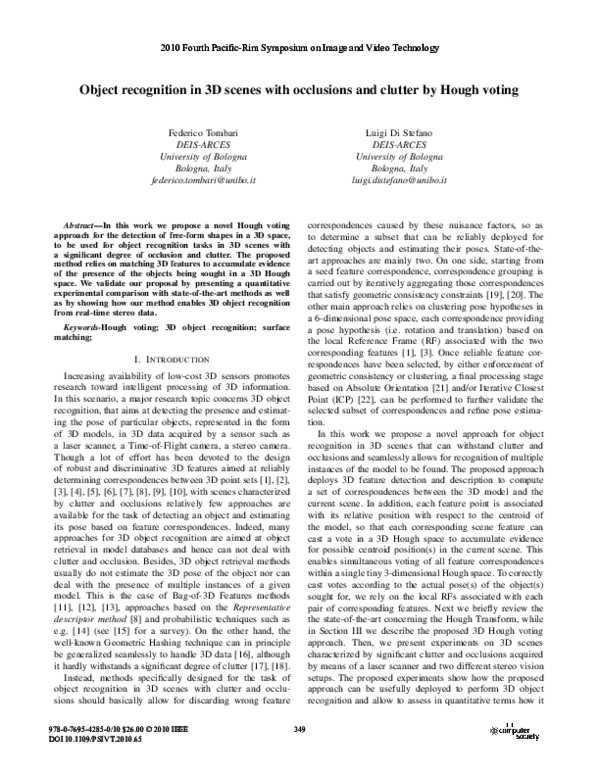
�Figure 1.
Use of the proposed Hough voting scheme (red blocks) in a 3D object recognition pipeline.
is significantly more discriminative and robust compared to
the main existing methods.
has been proposed [28]. Yet, as pointed out in the paper,
this technique has several disadvantages that hardly allow its
direct application. In particular, to deal with generic rotations
and translations in a 3D space the Hough space becomes 6dimensional, leading to a high computational cost of the
voting process (i.e. O(M · N 3 ), M being the number of 3D
points and N the number of quantization intervals) as well
as to high memory requirements. Also, the resulting array
would apparently be particularly sparse. Conversely, as described in the next section, with our approach the complexity
of the voting process is O(Mf ) (Mf being number of feature
points) and the Hough space is 3-dimensional.
Another approach is represented by employment of Hough
voting for the sake of hypothesis verification in 3D object recognition [29]. Unlike the previously discussed 3D
extensions, this approach relies on feature correspondences
established between the object model and the current scene.
Correspondences are grouped in pairs and in triplets in
order to vote, respectively, in two distinct 3-dimensional
Hough spaces, one meant to parametrize rotation and the
other to account for translation. Since otherwise the number
of groups would grow prohibitively large, only a fraction
of the feature correspondences is deployed in each of the
two voting processes. Then, peaks in the Hough spaces
indicate the presence of the sought object. Differently, with
our approach only a single 3D Hough space is needed and,
due to the deployment of the local RFs attached to features,
each correspondence can cast its own vote, without any
need for grouping correspondences. The latter difference
renders our approach intrinsically more robust with respect
to wrong correspondences caused by clutter and also allows
for deployment of all of the available information (i.e.
correspondences) within the voting process. Finally it is
also worth pointing out that, due to the grouping stage,
the method in [29] shares significant similarities with the
geometric consistency approaches mentioned in previous
section.
II. H OUGH VOTING
The Hough Transform (HT) [23] is a popular computer
vision technique originally introduced to detect lines in 2D
images. Successive modifications allowed the HT to detect
analytical shapes such as circles and ellipses. Overall, the
key idea is to perform a voting of the image features (such
as edges and corners) in the parameter space of the shape to
be detected. Votes are accumulated in an accumulator whose
dimensionality equals the number of unknown parameters of
the considered shape class. For this reason, although general
in theory, this technique can not be applied in practice to
shapes characterized by too many parameters, since this
would cause a sparse, high-dimensional accumulator leading
to poor performance and high memory requirements. By
means of a matching threshold, peaks in the accumulator
highlight the presence of a particular shape in the image.
The Generalized Hough Transform (GHT) [24] extends the
HT to detection of objects with arbitrary shapes, with each
feature voting for a specific position, orientation and scale
factor of the shape being sought. To reduce the complexity,
the gradient direction is usually computed at each feature
position to quickly index the accumulator.
The extension of the original HT formulation to 3D data is
quite straightforward and allows detection of planes within
3D point clouds. Similarly to the 2D case, also the 3D
HT has been modified to deal with additional 3D analytical
shapes characterized by a small number of parameters, such
as spheres [25] and cylinders [26]. A slightly more general
class of objects, i.e. polyhedra, is considered in [27], with a
Hough Voting method in two separate 3D spaces accounting
for rotation and translation allowing to detect objects based
on correspondences between vertex points established by
matching straight edges. Unlike our proposal, though, this
method cannot provide a unique pose hypothesis for each
correspondences and, more importantly, cannot be applied
to generic free-form objects.
More recently, an extension to the 3D domain of the GHT
where gradient directions are substituted by point normals
III. T HE PROPOSED 3D H OUGH VOTING ALGORITHM
Suppose we have an object model that we want to recognize in a scene, both in the form of 3D meshes. The flow of
350
�Figure 2.
Figure 3.
Example of 3D Hough Voting based on local RFs.
Toy example showing the proposed 3D Hough Voting scheme.
meshes are present in literature [3], [7], [5], [9], [10]. In our
approach, we use the fully unambiguous local RF method
proposed in [30]. This method selects as the local RF of
a feature the three eigen vectors obtained by EVD of the
distance-weighted covariance matrix of a local neighborhood
of the feature. Then, a proper sign disambiguation procedure
is applied to render the local RF unique and unambiguous.
Hence, in our approach, we perform an additional offline
step (see Fig. 1), that represents the initialization of the
Hough accumulator. Supposing that all point coordinates of
the 3D model are given in the same global RF, for each
model feature point FiM we compute first the vector between
C M and FiM :
M
Vi,G
= C M − FiM
(1)
the proposed object recognition approach is sketched in Fig.
1. At first, interest points are extracted from both the model
and the scene either by choosing them randomly or by means
of a feature detector [1], [2], [3], [4]. They are represented
as blue circles in the toy example shown in Fig. 2. Then,
each feature point is enhanced with a piece of information
representing a description of its local neighborhood, i.e. a 3D
feature descriptor [3], [5], [6], [7], [8], [9], [10]. Typically,
detecting and describing features of the model(s) can be
performed once and for all off-line. Given a set of described
features both in the model and in the scene, a set of feature
correspondences (green arrows in Fig. 2) can be determined
by thresholding, e.g., the euclidean distance between their
descriptors. Due to the presence of nuisance factors such
as noise, cluttered background and partial occlusions of the
object being sought, typically this set includes also wrong
correspondences (red arrow in Fig. 2).
The use of the proposed Hough voting scheme aims
at accumulating evidence for the presence of the object
being sought. If enough features vote for the presence of
the object in a given position of the 3D space, then the
object is detected and its pose is determined by means of
the computed correspondences. In particular, at initialization
time (i.e. offline) a unique reference point, C M , is computed
for the model (red circle in Fig. 2). In our experiments,
we have selected the centroid of the model, though this
particular choice does not affect the performance of the
algorithm. Then, still at initialization, the vector between
each feature and the centroid is computed and stored (blue
arrows in Fig. 2). Since we want our method to be rotation
and translation invariant, we can not store these vectors in
the coordinates of the global RF (Reference Frame) since
this would render them dependent on the specific RF of
the current 3D mesh. Hence, and as sketched in Fig. 4, we
need to compute an invariant RF for each feature extracted
(i.e. a local RF) both in the model and in the scene. In
particular, the local RF has to be efficiently computable
(since we need to compute one RF for each feature) and
very robust to disturbance factors (to hold on its invariance
properties). Several proposals for local RF frames for 3D
Then, to render this representation rotation and translation
M
invariant, each vector Vi,G
has to be transformed in the
coordinates given by the corresponding local RF (i.e. that
computed on FiM , see Fig. 4) by means of the following
transformation:
M
M
M
Vi,L
= RGL
· Vi,G
(2)
M
where · represents the matrix product and RGL
is the rotation
matrix where each line is a unit vector of the local RF of
the feature FiM :
�
�
M
M M T
RGL
(3)
= LM
i,x Li,y Li,z
The offline stage ends by associating to each feature FiM its
M
.
vector Vi,L
In the online stage, once correspondences between the
model and the scene have been obtained as described above,
each scene feature FjS for which a correspondence has been
found (FjS ↔ FiM ) casts a vote for the position of the
reference point in the scene. Since the computation of the
local RF for FjS is invariant to rotations and translations,
this allows to determine the transformation shown in Fig.
S
M
= Vi,L
. Finally, we have to
4 as RM SL , yielding Vi,L
S
transform Vi,L into the global RF of the scene, by means of
the following relationship:
S
S
S
= RLG
· Vi,L
+ FjS
Vi,G
351
(4)
�Figure 4.
Transformations induced by the use of local RFs.
S
where RLG
is the rotation matrix obtained by lining up by
columns the unit vectors of the local RF of the feature FjS :
�
�
S
(5)
RLG
= LSj,x LSj,y LSj,z
In particular, we propose here two different Experiments.
Experiment 1 concerns quantitative comparison between
the proposed approach and the main existing methods.
In particular, we compare our proposal to the algorithm
presented in [1], as a representative of the approaches relying
on clustering in the pose space, and to that described in
[19], as a representative of methods based on geometric
consistency. Hereinafter, we will refer to these two methods
as, respectively, Clustering and GC. Given a set of models
and a certain number of scenes (not containing all models but
only a subset), all models are sought in each scene by means
of each of the considered object recognition method. The
outcome of an object recognition experiment can be a True
Positive (TP), if the model sought for is present in the scene
and correctly detected and localized, or a False Positive
(FP), either if a model present in the image is detected
but not correctly localized or the model is not present in
the image but detected by the method. Hence, quantitative
results are shown in terms of Recall vs. 1-Precision- curves.
To evaluate the localization, we first compute the RMSE
between ground-truth feature positions (i.e. features mapped
according to the ground-truth poses) and those obtained by
applying the pose transformation estimated by the algorithm,
then we assume a correct localization if the RMSE is lower
than a fixed threshold (5 times the average model mesh
resolution in our experiments).
Thanks to these transformations, the feature FjS can cast
S
a vote in a tiny 3D Hough space by means of vector Vi,G
(see Fig. 3). Evidence for the presence of a particular object
can then be evaluated by thresholding the peaks of the
Hough space. Seamlessly, multiple peaks in the Hough space
highlight the presence of multiple instances of the object
being sought. In the specific case that only one instance of
the object is sought for in the scene, we selected the bin
in the Hough space having the maximum number of votes.
Moreover, in order to render the peak selection process more
robust to quantization effects, also the neighboring bins to
those yielding a local maximum can be accounted for. In
particular, we propose to threshold the Hough space peaks by
adding to each bin the values of its 6 neighboring bins, since
the presence of noise can cause correct correspondences to
fall into neighboring bins. Then, when selecting the subset of
correspondences to be used for successive stages (absolute
orientation, pose estimation, ..) only those concerning the
central bin of over-threshold maxima are accounted for, since
this allows improved accuracy.
Hence, a subset of coherent correspondences providing
evidence of the presence of the model is selected among
all correspondences determined in the matching stage. As a
successive step, the pose of the object can be determined
by means of an Absolute Orientation algorithm [21].As
previously mentioned, this step can also be deployed as
a further geometric verification of the presence of the
model by thresholding the Root Mean Square Error (RMSE)
between the subset of scene features and the transformed
subset of model features. By repeating the same procedure
for different models, the presence of different objects (i.e.
those belonging to a reference library) can be evaluated.
We have performed our object recognition tests on two
different dataset. The former (Dataset 1) is a publicly
available 3D dataset built by Mian et al. [1] and made out of
5 models and 50 scenes, for a total of 250 object recognition
instances. The second dataset (Dataset 2) has been acquired
in our lab by means of the Spacetime Stereo (STS) technique
[31], [32] and consists of 6 models and 12 scenes, for a total
of 72 object recognition instances. Both datasets are quite
challenging in terms of degree of clutter and occlusions (see
Fig. 5). Since the focus of our experiment is on comparing
the ability of the considered object recognition methods to
filter out outliers due to clutter and occlusion, to attain a fair
comparison we feed each of the 3 algorithms with exactly
the same correspondences, which are determined as follows.
IV. E XPERIMENTAL EVALUATION
This Section presents experimental results concerning the
proposed Hough voting scheme for 3D object recognition.
352
�Figure 5.
Sample scenes from Dataset 1 (left) and Dataset 2 (right).
As for detection of keypoints, a fixed number of 3D
points is randomly extracted from each model (i.e. 1000)
and each scene (i.e. 3000). We use a random detector for
fairness of comparison, so as to avoid any possible bias
towards some object recognition methods that might benefit
of specific features found by specific 3D detectors. It is
also worth pointing out that, overall, the use of a random
detector increases the difficulty of the object recognition
task. The descriptor and the feature matcher are also the
same for all object recognition methods, and they are ran
with the same parameter values. More precisely, we use
the recent hybrid signature-histogram descriptor proposed
in [30], while for feature matching we rely on the euclidean
distance and deploy a well-know efficient indexing technique
(i.e. Kd-tree [33]) to speed-up the computations. Instead,
a specific tuning has been performed for the parameters
of the object recognition techniques, i.e. the Hough space
bin dimension for the proposed approach, the geometrical
consistency threshold for GC and the number of k-means
clusters for Clustering. The number of k-means iterations
for Cluster has been set to 100 since we noted that the
algorithm performance was not sensible to this parameter.
Tuning has been performed over Dataset 1, then the same
parameters have been used for the experiments on Dataset
2.
Figure 6 reports the results concerning Experiment 1. As
it can be seen, on both datasets the proposed approach yields
improved recognition capabilities with respect to Clustering
and GC. In particular, on both datasets the proposed Houghbased recognition approach always yields higher Recall at
the same level of Precision. Moreover, on Dataset 2 a
specific threshold value exists that allows our approach to
yield 100% correct recognitions and no false detections. It is
also worth pointing out that in our experiments on Dataset 1
the GC approach, unlike the other 2, turned out to be particularly sensitive to the threshold parameter. In particular, the
selected correspondence subset is always characterized by a
smaller cardinality compared to the other two approaches,
this denoting a worse capability of consensus grouping for
GC. As for efficiency, with these parameters and in our
experiments the proposed approach and GC are overall much
more efficient than Clustering (i.e. they run more than one
order of magnitude faster).
As for Experiment 2, we evaluate qualitatively the performance of the proposed algorithm in an online object
recognition framework based on stereo data. In particular,
the stereo setup is based on two webcams and a stereo
processing algorithm that computes range maps using the
real-time OpenCV stereo matching algorithm [34]. To improve the performance of the stereo algorithm, and hence
the quality of the retrieved 3D data, a binary pattern is
projected on the scene using a standard projector. This helps
stereo matching by enriching homogeneous regions with a
certain degree of texture. Nevertheless, we wish to point
out that such a real-time stereo setup is very challenging
for the purpose of 3D object recognition, since the 3D data
attainable for both models and scenes are still notably noisy
and with missing parts (see Fig. 7). As for the experiment,
we try to detect two models previously acquired with the
same stereo setup within scenes characterized by significant
clutter and occlusions (see again Fig. 7). In Figure 7, the
blue bounding box shows the pose of the model estimated
by our method. Such results shows that our proposal allows
for carrying out object recognition in presence of noisy 3D
data, as those attainable with a real-time stereo setup, and
in scenes characterized by a significant amount of clutter
353
�Figure 6. Experiment 1: Precision-recall curves of the 3 evaluated object recognition approaches. Left: 250 object tests on Dataset 1. Right: 72 tests on
Dataset 2.
and occlusions. Additional results are provided as a video,
included in the supplementary material, showing additional
object recognition experiments performed within the stereo
object recognition framework presented in this Section.
[5] ——, “Scale-dependent/invariant local 3d shape descriptors
for fully automatic registration of multiple sets of range
images,” in ECCV, 2008, pp. 440–453.
[6] A. Johnson and M. Hebert, “Using spin images for efficient
object recognition in cluttered 3d scenes,” PAMI, vol. 21,
no. 5, pp. 433–449, 1999.
V. C ONCLUSIONS
We have proposed a novel approach based on 3D Hough
voting for detection and localization of free-form objects
from range images, such as those provided by laser scanners and stereo vision sensors. The experimental evaluation shows that our method outperforms clearly the algorithms chosen as representative of the two main existing
approaches, i.e. those relying on geometric consistency and
on pose space clustering. We have also provided results
proving that our method is effective in detecting 3D objects
from the very noisy 3D data attained through a real-time
stereo setup, in particular in complex scenes characterized
by significant clutter and occlusion.
[7] C. S. Chua and R. Jarvis, “Point signatures: A new representation for 3d object recognition,” IJCV, vol. 25, no. 1, pp.
63–85, 1997.
[8] A. Frome, D. Huber, R. Kolluri, T. Bülow, and J. Malik,
“Recognizing objects in range data using regional point
descriptors,” in ECCV, vol. 3, 2004, pp. 224–237.
[9] F. Stein and G. Medioni, “Structural indexing: Efficient 3-d
object recognition,” PAMI, vol. 14, no. 2, pp. 125–145, 1992.
[10] A. Mian, M. Bennamoun, and R. Owens, “A novel representation and feature matching algorithm for automatic pairwise
registration of range images,” IJCV, vol. 66, no. 1, pp. 19–40,
2006.
R EFERENCES
[1] A. Mian, M. Bennamoun, and R. Owens, “On the repeatability and quality of keypoints for local feature-based 3d object
retrieval from cluttered scenes,” Int. J. Computer Vision, p. to
appear, 2009.
[11] Y. Liu, H. Zha, and H. Qin, “Shape topics: A compact representation and new algorithms for 3d partial shape retrieval,”
in Proc. CVPR, 2006.
[12] X. Li, A. Godil, and A. Wagan, “Spatially enhanced bags
of words for 3d shape retrieval,” in Proc. ISVC, 2008, pp.
349–358.
[2] H. Chen and B. Bhanu, “3d free-form object recognition in
range images using local surface patches,” Pattern Recognition Letters, vol. 28, no. 10, pp. 1252–1262, 2007.
[3] Y. Zhong, “Intrinsic shape signatures: A shape descriptor for
3d object recognition,” in Proc. 3DRR Workshop (in conj.
with ICCV), 2009.
[13] R. Ohbuchi, K. Osada, T. Furuya, and T. Banno, “Salient
local visual features for shape-based 3d model retrieval,” in
Proc. Int. Conf. on Shape Modeling and Applications, 2008,
pp. 93–102.
[4] J. Novatnack and K. Nishino, “Scale-dependent 3d geometric
features,” in Proc. Int. Conf. on Computer Vision, 2007, pp.
1–8.
[14] G. Hetzel, B. Leibe, P. Levi, and B. Schiele, “3d object recognition from range images using local feature histograms,” in
Proc. CVPR, 2001, pp. 394–399.
354
�Figure 7.
Results yielded by the proposed approach in Experiment 2.
[15] J. W. H. Tangelder and R. C. Veltkamp, “A survey of content
based 3d shape retrieval methods,” in Proc. Shape Modeling
International, 2004, pp. 145–156.
[25] G. Vosselman, B. Gorte, G. Sithole, and T. Rabbani, “Recognising structure in laser scanner point cloud,” Int. Arch. of
Photogrammetry, Remote Sensing and Spatial Information
Sciences, vol. 46, pp. 33–38, 2004.
[16] Y. Lamdan and H. J. Wolfson, “Geometric hashing: A general
and efficient model-based recognition scheme,” in Proc. Int.
Conf. on Computer Vision, 1988, pp. 238–249.
[26] T. Rabbani and F. Van Den Heuvel, “Efficient hough transform for automatic detection of cylinders in point clouds,” in
ISPRS Ws. Laser Scanning, 2005, pp. 260–65.
[17] W. Grimson and D. Huttenlocher, “On the sensitivity of
geometric hashing,” in Proc. Int. Conf. on Computer Vision,
1990, pp. 334–338.
[27] H. Tsui and C. Chan, “Hough technique for 3d object
recognition,” IEE Proceedings, vol. 136, no. 6, pp. 565–568,
1989.
[18] Y. Lamdan and H. Wolfson, “On the error analysis of ’geometric hashing’,” in Proc. IEEE Conf. on Computer Vision
and Pattern Recognition, 1991, pp. 22–27.
[28] K. Khoshelham, “Extending generalized hough transform
to detect 3d objects in laser range data,” in Proc. ISPRS
Workshop on Laser Scanning, 2007, pp. 206–210.
[19] A. E. Johnson and M. Hebert, “Surface matching for object
recognition in complex 3-d scenes,” Image and Vision Computing, vol. 16, pp. 635–651, 1998.
[29] A. Ashbrook, R. Fisher, C. Robertson, and N. Werghi,
“Finding surface correspondence for object recognition and
registration using pairwise geometric histograms,” in Proc.
European Conference on Computer Vision, 1998, pp. 674–
686.
[20] H. Chen and B. Bhanu, “3d free-form object recognition
in range images using local surface patches,” J. Pattern
Recognition Letters, vol. 28, pp. 1252–1262, 2007.
[30] Anonymous, “Anonymous submission,” in Accepted to ECCV
2010, 2010.
[21] B. Horn, “Closed-form solution of absolute orientation using
unit quaternions,” J. Optical Society of America A, vol. 4,
no. 4, pp. 629–642, 1987.
[31] J. Davis, D. Nehab, R. Ramamoothi, and S. Rusinkiewicz,
“Spacetime stereo : A unifying framework for depth from
triangulation,” PAMI, vol. 27, no. 2, pp. 1615–1630, 2005.
[22] Z. Zhang, “Iterative point matching for registration of freeform curves and surfaces,” Int. J. Computer Vision, vol. 13,
no. 2, pp. 119–152, 1994.
[32] L. Zhang, B. Curless, and S. Seitz, “Spacetime stereo: Shape
recovery for dynamic scenes,” in Proc. CVPR, 2003.
[23] P. Hough, “Methods and means for recognizing complex
patterns,” US Patent 3069654, 1962.
[33] J. Beis and D. Lowe, “Shape indexing using approximate
nearest-neighbour search in high dimensional spaces,” in
Proc. CVPR, 1997, pp. 1000–1006.
[24] D. Ballard, “Generalizing the hough transform to detect
arbitrary shapes,” SPIE Proc. on Vision Geometry X, vol. 13,
no. 2, pp. 111–122, 1981.
[34] http://opencv.willowgarage.com.
355
�
 Federico Tombari
Federico Tombari