2010 7th Intenational Multi-Conference on Systems, Signals and Devices
A
Rule-Based System for Trajectory Planning of an
Indoor Mobile Robot
Siba M. Sharef, Waladin K. Sa'id, Farah S. Khoshaba
Control and Systems Engineering Department, UO, Iraq.
Siba sharef@yahoo.com
waladinksy@yahoo.com
farah_sami76@yahoo.com
Ahstract-
In
this
developed
for
a
controller
unknown
that
paper,
two
can
a
navigate
environment.
sotware
wheels
The
driven
the
work
simulation
mobile
robot
safely
involves
model
robot
the
is
motion
through
design
an
of a
controller, which has four functions: motion control; obstacle
avoidance; self-location; and path planning both global and local.
The proposed controller is responsible for the mobile robot
navigation ater it generates a trajectory between start and goal
points. Also it enables the robot to operate successfully in the
presence of various obstacles present in any user built maps. The
mobile robot is able to locate its position on any given map. The
dynamic of the mobile robot is examined and the time constant of
the two motors, which affects the direction of the mobile robot
motion, is controlled. Obstacle avoidance is implemented with
Fuzzy
Logic
Controller.
The
numerical
experiments
demonstrated that the indoor robot navigated successfully in
tight corridors, avoided obstacles and dealt with a variety of
world
maps
with
presented to it.
various
1.
irregular
wall
shapes
that
were
INTRODUCTION
Automated Guided Vehicle (AGV) has been in existence
since the 1950's. AGVs are driver-less industrial trucks,
usually powered by electric motors and batteries and were
applied mainly in warehouses, factories and mines [I]. Since
then mobile robots were developed and applied in factories,
military, planetary exploration, mining, woods, hospitals and
for the disabled. The advancement in technology and in
particular the development of on-board signal and data
processng technology has added to the acceptance and wide
spreading of its use. A wheeled mobile robot is a wheeled
vehicle, which is capable of an autonomous motion (without
extenal human driver) because it is equipped, for its motion,
with sensors and actuators that are driven by an embarked
computer [2]. They come in a variety of sizes, shapes, and
capabilities, but they are all made up of the same important
parts; each of these parts must be designed to work with other
parts of the system as well as the other machines in a work
cell [3}.
One of the most important tasks in autonomous navigation
is to create a suitable path planning in environments where
robot navigates [4]. In moving between two points, the mobile
robot must plan its path (globally and locally) as well as
avoiding obstacles by temporarily deviating rom the planned
path. Furthemore, robot motion must be controlled which
implies the strategy by which the platform approaches a
desired location and the implementation of this strategy [5].
The robot should be capable of intelligent motion and action
978-1-4244-7534-6/10/$26.00 ©201O IEEE
without requiring any extenal support while executing a
given task. There are many algorithms for control of mobile
robots described in literature [6]. However control of
nonholonomic systems is a dificult problem. In tasks such as
trajectory tracking or following a predetemined trajectory, it
is necessay to control simultaneously the position and
orientation of the robot, as well as its velocity.
This paper focuses on the application of FLC to move,
orient and avoid obstacles of a mobile robot as it navigates in
an indoor environment. For this end a differentially wheel
driven mobile robot is considered and its kinematics and
dynamics are modeled and the control action of the wheels
speed is discussed. Global and local path planning and
localization method are also examined and simulated.
II. MOBILE ROBOT DISCRIPTION
The mobile robot under study is made up of a rigid cart
equipped with non-deformable wheels and it is moving on a
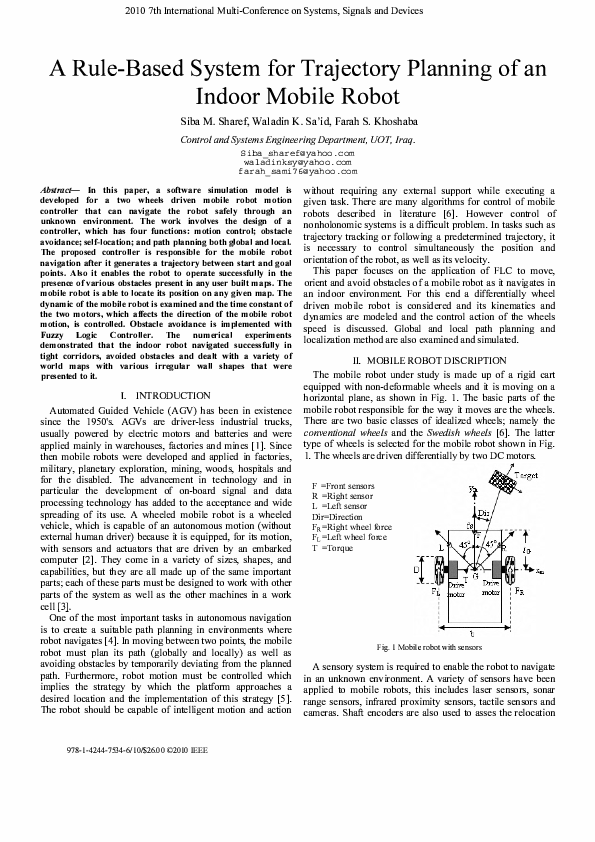
horizontal plne, as shown in Fig. 1. The basic parts of the
mobile robot responsible for the way it moves are the wheels.
There are two basic classes of idealized wheels; namely the
conventional wheels and the Swedish wheels [6]. The latter
type of wheels is selected for the mobile robot shown in Fig.
1. The wheels are driven differentially by two DC motors.
F =Front sensors
R =Right sensor
L =Let sensor
Dir=Direction
FR =Right wheel force
FL =Let wheel force
T =Torque
Fig. 1 Mobile robot with sensors
A sensory system is required to enable the robot to navigate
in an unknown environment. A variety of sensors have been
applied to mobile robots, this includes laser sensors, sonar
range sensors, inrared proximity sensors, tactile sensors and
cameras. Shat encoders are also used to asses the relocation
�2010 7th Intenational Multi-Conference on Systems, Signals and Devices
of the robot in comparison with the previous cycle.
Furthemore, they are used to estimate the thereabouts of the
robot position relative to the starting point or the borders of
the environment while the robot navigates in the environment
[7]. Fig. 1 shows the proposed sensor layout for the mobile
robot under study. The igure shows three sonar sensing
devices mounted in ront, let and right of the robot's platform.
: oom:
:
:....... : ...�... ;.��..
�t�.
7�I
Yo
.;+ _�
.'
-"
-_-._:
)
o
..
�
... ____
i
'.���._�
..
.......
�
_____ ...
t
Fig. 2 Mobile robot in a typical indoors space
The position of the robot in the plane is described by the
ixed rame (xo,yo,zo) and the moving coordinates system
(xm,Ym,zm), as shown in Fig. 2. The rame (xo,Yo,zo) is located
at any convenient point in the buildng and the moving rame
(xm,Ym,zm) is ixed at point G in the platform. The robot
posture can be described in terms of the orign of rame
(xm,Ym,zm) and its orientation angle > (Fig. 2) both with
respect to the base rame with origin at O.
III. MODELING of the MOBILE ROBOT
The kinematics and dynamics of the 2-DOF differentials
drive vehicle shown in Fig. 1 is given in this section. The
analysis assumes that the contact between the wheel and the
ground is reduced to a sngle pont of the plane.
The purpose of kinematics is to deine the relationship
between all known or measurable positions and velocities, and
all quantities, which are computed by kinematics. With
reference to Fig. 1 and Fig. 2, the linear velocity vector for the
centre point of the differential-drive mobile robot is given by;
VG c �s >
c s> c �s> V
G
=
=. �
YG
VGSll>
2 Sll> Sll> VR
[� ] [
] [
[�
=
D c s> c �s>
4 Sll> Sll>
] [ L]
] [OORL]
b c> + 2LG s>
D
=- b s>-2LG c>
4b
-2
P
And the position vector is,
=
..
: 3
[�Yffssl [
[�::] � M[:�]
--.
: oom
.
To construct workable system trajectories, the differential
kinematics are required for point "fs" on the mobile platform.
This point is the base of the ront sonar sensor. Simple
analysis shows that this differential kinematics is described by
the following position/orientation vector [8];
(1)
As shown in Fig. 2, V G is the linear velocity of the robot's
centre (point G) along axis xm. VL and VR are the velocities of
the let and right side wheels, respectively. Similarly, the
wheels angular velocities are iL and iR and D is the wheel
diameter. xG and YG are the robot's velocity components
along the ixed rame coordinates (xo,yo). The orientation of
the robot expressed by > is obtained by dividing the rows of
equation (l), i.e., >=tan' \ xG /YG) '
(2)
M
(3)
The value of the elements of matrix
follows directly rom
equation (2). The symbols c and s have been used instead of
cos and sin. Equation (2) shows that the output velocities are
nonzero even if only one wheel is rotating. For this reason this
type of platform has the ability to change its orientation on the
spot.
Mobile robot dynamics refer to the relationship between
forces, torques and acceleration. Applying Newton's second
law of motion to the differential-drive mobile robot shown in
Fig. 1, the followng is obtaned;
[V; 1 Jl� _�J[��J l
(4)
[V; l��rl� _�b J1H::l-k,[::ll
(5)
Jr
Jr
Where, FR is the force exerted on the robot by the right wheel,
FL is the force exerted by the let wheel and b is the distance
between the two wheels (Fig. 1). Jr and m are moment of
inertia and mass of the mobile robot, respectively.
The basic actuation device of almost all mobile robots is the
DC motor. To include the driving mechanism, the motor load
is the wheel driving force times the wheel radius, equation (4)
takes the following form;
Jr
Jr
Where the constants kl and kz are unctions of DC motor gear
ratio, coil resistance, torque and back emf constants. Right and
let wheel DC motor armature voltages are eaR and eaL,
respectively. Equation (5) assumes that the mass and the
moments of inertia of the castor and driving wheels are
negligible. Fig. 3 shows the block diagram for simulating the
mobile robot dynamics. The dynamic equation used is based
on introducing the concept of total inertia seen at the load.
Driving a mobile robot to any goal along any trajectoy will
eventually require varying iR and iL' This is done by varying
the command signals ieR and ieL. The driving armature
voltages are generated by the right and let wheel controllers.
The driving motors used are unsymmetrical.
�2010 7th Intenational Multi-Conference on Systems, Signals and Devices
1
OR
oL
J,
1
b
m
e.
e�
[ �; ]
OcR
0 cL
,1
tS + 1
rules for any set of sensor inputs. Fig. 1 shows the proposed
sensor layout for the mobile robot under study. Four uzzy
membership unction inputs and two outputs are used, as
shown in Fig. 5. The irst input represents the reading of the
let sensor (L); the second represents the reading of the ront
sensor (F), the third represents the reading of the right sensor
(R) and the fourth input represents the direction of the robot
according to the direction of the goal. The latter input is called
the heading (Dir). Also, the irst output represents the speed of
the let wheel (V L) , and the second output represents the speed
of the right wheel (V R) , that enables the robot to tum in both
sides or move forward accordng to the difference between
wheel velocities.
L
Fu zzy
rules
F
R
Fig. 3 Mobile robot and controller block diagram simulation
IV.
MOBILE ROBOT CONTROLLER
The mobile robot controller has four basic unctions: motion
control; obstacle avoidance; self-location; and path planning
(global and local). It is responsible for the mobile robot
navigation ater generating a trajectory between starting and
goal points. Also it enables the robot to operate successully in
the presence of various obstacles present in any user built
maps. Fig. 4 shows the controller structure scheme. Mobile
robot dynamics block (Fig. 3) and measurements blocks have
also been added. The noise block takes into account the
uncertainty of the wheel diameters and the sensor errors. The
next sections are devoted to the four unctions of the
controller.
Land Marks
Motion
controller
Dir
Fig. 5 Inputs and outputs of the fuzzy logic control
Once the inputs and outputs are identiied and deined, the
relationship between them must be established. The rule base
was designed using hman experience. The rules are
translated into the uzzy rules shown in Table 1.
TABLE I
RULE-TABLE FOR OBSTACLE AVOIDANCE
Right wheel
Dir
F
Fb
Fs
R
Lb
Ls
Lb
s
LY
--,
F
Fb
Fig. 4 Mobile robot controller structure scheme
A. Realization of the FLC for Obstacle Avoidance
This section is devoted to the implementation of the uzzy
logic reasonng to avoid obstacles where rules are put into
operation to map inputs and outputs. Expert rules can be
translated easily into IF-THEN statements used by uzzy logic
Fs
\
Lb
Ls
Lb
Ls
SR
Rb
Rs
Rb
Rs
R
R
L
L
L
R
F
R
1
Dir
Obstacle avoidance
[F
�
SL
F
R
1
1
Let wheel
SL
SR
Rb
Rs
L
L
R
F
L
L
R
R
F
R
1
Rb
Rs
R
F
R
R
R
R
F
L
Note: The symbols used refer to the following:
*For output variables: R: tum Right, F: go Forward and L:
tum Let.
�2010 7th Intenational Multi-Conference on Systems, Signals and Devices
*For input sensors (R, L, F & Dir): Lb: Let big, Ls: Let
small, Rb: Right big, Rs: Right small, Fb: Forward big, Fs:
Forward small, SL: Small Let, SR: Small Right.
The MFs of inputs are shown in igs. (6a and b). Let and
right wheel robot velocities output MFs are shown in Fig. 7.
According to the rules in Table 1 if an obstacle is detected by
R sensor then the following logic should be followed;
Also, a number of landmark points are read. These landmarks
are used to predeine a suitable path for the mobile robot to
follow on its way to its goal. If an obstacle is detected, then
FLC algorithm is applied to avoid it then it retuns to its
original path until the robot reaches its inal destination [10].
IF F is Fb AND L is Lb AND R is Rs AND Dir is DR THEN (
VR is R AND VL is F) that means right wheel velocity should
This method is also called on-line path planning. With this
method there is no speciic map stored in the computer and
the user inputs the map only. So the mobile robot uses sensors
to detect obstacles and ind an appropriate path to the goal
with the use of the FLC. Ater the map is drawn, the start and
end points are speciied then the program speciies a straight
line between the initial position of the mobile robot and the
target. Then the X and Y of all lines ponts (wall obstacle
coordinates) are saved n arrays.
The mobile robot starts its way to the target by tracking a
straight line between start and goal points. If an obstacle is
detected (when a zero appears in the matrix ( X, Y) , the FLC
algorithm is applied to avoid the obstacle that is located in its
way. Then a new straight line trajectory is generated to the
target [10].
be bigger than let one hence the robot swerves let to avoid
that obstacle. Fuzzy algorithm was implemented using
MATLAB 7.0.
n execution panel was built using the Graphical User
Interface (GU1) of MATLAB 7.0 [9]. The panel was used to
insert the environment map. It was used to set the start and
end positions of the mobile robot, speciy its wheel's
maximum speed and speciy landmark points.
Sensors (R), (F), (L)
MF
I
b
o
(a)
0.2
0. 4
0.6
0.8
Input variable (Unit distance)
DL
MF
I
DR
0.5
o
-180 -135
-90 -45
0
45
90
Input variable Dir (deg)
135
180
Fig. 6 Membership function of input variables (a) Sensors (R), (F), & (L);
(b) Dir
(b)
MF
I
Local-Path Planning
. Global Path Planning
0.5
o
B.
V� VL
L
F
R
0.5
o
-20
-IS
-10 -5 0
5
10
IS
20
Output variables (Unit distance lunit time)
Fig. 7 Membership unctions of output variables VR and VL
Briely, the sotware that was developed [10] reads the map
and the goal position (Xgoab Ygoal) irst. Then it converts the
environment map to a matrix of (40 X 40) elements. The
matrix consists of l's and O's. The l's represents the space
and the O's represents the wall's start and end points and the
obstacles. The maximum ( WRmax, WLmax) and the initial (WRO,
WLO) angular velocities of right and let wheels are then read.
This method is called off-line path planning where the
planning is based on a priori complete infomation about the
environment stored in the controller processor. So the mobile
robot plans and acquires (establishes) the path to the goal
before it begins its jouney.
Path planning starts by constructing an initial straight line
between start and goal points. Using the stored map of the
environment, if a wall is present in between start and goal
ponts, a new ictitious goal point is generated based on
logical reasonng. The procedure is repeated until the robot
inds its way out of the room. The closing ictitious goal point
now becomes the new start pont and the process is repeated
until the planned path attains its goal point. As the robot
travels to its goal point, FLC obstacle avoidance is activated
whenever obstacles are sensed [10].
D. Localization
Estimating the position of a robot based on sensor data is
one of the undamental problems of mobile robotics, which is
called localization [11]. Two methods were used for locating
the robot. The irst one uses shat encoders. The odometric
measurement determines approximately the where about of
the robot, since the system is an open loop and therefore is
subjected to extenal disturbances. However it is useul in the
sense that it provides information about the relocation of the
robot in comparison with the previous cycle.
The second method uses the ultrasonic self location system,
which gives a measure of the position. It uses an on-board
ultrasonic transmitter and two receivers ixed appropriately in
the ceiling of the environment to locate a point. It relies on the
measurement of the Time-Of-Flight between the transmitter
and receivers and the use of simple trigonometric relations.
Such a system gives a measure of the actual position of the
vehicle during its movement. The mobile is to check its
�2010 7th Intenational Multi-Conference on Systems, Signals and Devices
position every (1 second) in order to determine its position
with respect to a given map [12].
40
35
E
------�--------,--------� -------�-------�--------�-------� -------�.
,,
,,
,,
.,
,,
,,
.,
...
.
,
,
,,,
,
,
.
,
,,
.
..
...... � ....... .:. ....... � ....... ; ....... �........� ....... : ....... �.
,,
:
,,
S 'A
,
,
,
,
,
,
,
,
,
�
: : : : 1: : /_: '�-I : : : l-: : : 1: : : : :l: : : :1: : : : :1:
:
:
"
I
:
:
I
:
: ,
------�--t---- . .-------�---__
20
�'
:
ii," Bj
:
:
:
:
:
:
' -------�-------�-------�.
:
:
6
j
avoid it and continues moving in a straight line. Finally, a
straight line trajectory is followed until T point is successully
reached. Fig. 11 shows the case where two obstacles are
present between points Lj and L2. The igure clearly shows
that the mobile robot FLC successully swerves the robot
around the two obstacles. Also it can be seen that the robot
always attempts to travel in straight line trajectories until the
target is reached.
:
40
j
35
: ):Lr:F:eEfTJ
0
0
�;�
5
10
15
receivers
20
25
30
��!
3J
35
.
=
E
�
A
°�--�0
xm,
Fig. 10 The robot behavior with an obstacle in its trajectory
40
35
E
�
11
6
L
10
In the simulation it is assumed that the calculations contan
some error which canot exceed certain values. A typical
example of the localization procedure is shown in Fig. 8. The
mobile robot through its jouney rom the beginning to the end
pont, deines its position on the map every 1 second. The
trajectory of the mobile robot with deined location points is
shown in Fig. 9. Ponts A, B, C and D are typical points.
I
20
15
40
Fig. 8 The localization process for the mobile robot for a given map
2
25
3J
25
20
S
T
15
2�
10
2
�
1i
14
10
v.
°�--2�30
D
16
•
�
I
x"
(m)
Fig, 9 The trajectory of the mobile robot
X,m
�
NUMERICAL EXPERIMENTAL RESULTS
A series of numerical tests were carried out to test the ability
of the mobile conroller to deal with numerous circumstances.
Obstacle avoidance aptitude procedure was checked by the
two tests summarized in igs. (10) and (11). In the irst test a
path for the mobile robot was predeined with the presence of
one obstacle. Fig. 10) shows the environment (thick black
lines), start, target and two landmarks (Lj and L2) points. As
can be seen rom the igure, the robot travels in a straight line
rom points S to Lj• Then it continues its motion rom points
Lj to L2 in another straight line trajectory. However, a wall is
detected (an obstacle) and accordingly the robot tuns aside to
Fig. 11 The robot behavior with two obstacles in its trajectory
Local path plannng mode of operation of the mobile
controller is demonstrated by Figs. 12 and 13. The igures
show two different missions of the mobile robot in the same
environment. In Fig. 12, the robot travels through a passage
outside the room rom the start point S (10, 28) to the goal
pont T (36, 13). It can be clearly seen that the FLC has driven
the robot successully around the irst room comer (20, 25). In
the second mission shown in Fig. 13 the robot successully
move rom point (5,20), which is outside the room, to the
target (T), which is nside it.
The mission of the mobile robot shown in Fig. 14 is to go
rom a position in a passage to a target n room 2. The mobile
robot starts its jouney and reaches the goal in room 2 by
traveling through room 1.
�2010 7th Intenational Multi-Conference on Systems, Signals and Devices
40
35
30
E
------
;
:1,],]
-------
::-::l::-::
:
s
,
.
..
....
.
'
.
. � --�:--.....
--
,
.
--
---
:�
,,,
,
,
.
--
.
�:
----- ------,,,
,
,
--r-------,-------
1:
,,
,
., ·
,
as was mentioned earlier. When the wall ends, the mobile
robot goes to the goal again in a straight line. Fig. 15 shows
the same mission however this time the mobile robot reaches
the goal, by traveling through room 3 instead of 2. This is
because the door of room1 is closed, so the robot ns to the
right and enters room 3 then room 2.
40
----- � -
; - - - - - - - � ------ �- ----- �- -------t -
--------
-
35
-- --�
T
10
-
E
xtm
------
: -------�.
i Roo� 2
30
_______ J _______
Roo� I
25
-------------,
20
Fig. 12 The behavior of the mobile robot in a building
-
15
10
______
�
, __
:
------- -------,·
T
� ...-:
���::::r �n{
,
,
,
_
,
:
..
:
,
---
.
------- ------:
�
ROOl 3
i
,
,
,
,
,
- ------_ . _-----_ . .
,
,
,
,
The illusion
straight line
between the start
&end points.
Fig.15 The same mission as in ig, 14 but a different path is selected
Fig. 13 The behavior of the mobile robot in the same building
40
- - - - - - � - -------;- - - - - - - - � - - - - - - - � - - - - - - -�- - - - - - - -� - - - - - - - � - -- - ---�.
·
,
·
·
,
35
E"
.
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
I
,
,
I
,
,
30
,
,
,
,
-------
-' .
-----
-- _
�
r ------- ., "
..I:-------.-------,.
20
15
.
,
.
.
,
------- . ------- ..
.
_______ 1 _______
25
The performance of the robot using global-path planning
scheme was also tested. Fig. 16 presents a map of a building
that consists of a passage leading to three rooms. The mobile
robot must go rom point (5, 25) in the middle of the passage
to point T located in room1. Before motion starts, a proposed
trajectory of motion is developed irst, as shown in Fig. 16.
Then ater, the mobile robot will move following this
trajectory and successully reach the goal as shown in Fig. 17.
. _ - ----_ ., _------ ",
,
,
,
,
,,
,
,,
,
,
,
,
The illusion
straight line
between the start
__ ,
S.
�
::
5
0
5
Passge
I
11
IS
10
Fig. 14 The behavior of the mobile robot in an ofice like environment
This is because the robot always goes to the target in a
straight line if there is no obstacle in between. However as it
moves rom point A to point B in a straight line it faces the
wall between rooms 1 and 2. Hence it ns let and travels
along the wall, since the wall-following method was adopted
�
S
00
10
15
11
5
Room 2
-,
Room 1
0
5
Xm
em)
0
Fig.16 The initial path developed by the global-path planning scheme
�2010 7th Intenational Multi-Conference on Systems, Signals and Devices
E
:_ • • •·.I[I�I�i
:
:
L ;
I
Passage
S
.
i
1
u,
numU
.
i
.
.
15 ''' ,'''', ''''''''
,
,
10
------
:
·
·
·
·
·
i
:
,
,
,
"
"
r
i
·
·
"
"
"
T
:
"
"
,
----------------
·
·
"
-
'
"
"
"
i
r
------
:
.
.
' .
"
"
i
]
.
.
.
RomL
------
'
"
"
"
'
--
.
.
i
.
�
:
T:
•
.
.
.
' .
"
.
i
.
,
,
,
.
'
'
"""'��ri"""T
VI. CONCLUSIONS
In this paper we have presented a hierarchical controller for
mobile robot for application in workshops. A model-based
conroller was designed to drive the mobile robot rom start to
goal points. Fuzzy inference methods have been applied in
building the uzzy controller for obstacle avoidance. The
proposed trajectory planning and control methodology was
successully tested numerically.
The robot always attempts to move in a straight line
between the start point and the goal point. hen it faces an
obstacle, it tuns around and then it resumes its original
trajectory. Local-path planning makes use of the sensor
infomation. It is not necessary to deine a reference trajectory
prior to start of motion and store world maps in the memory of
the mobile robot. However, global-path planning requires the
workspace map be stored in the memory of the mobile robot.
The robot begins its jouney by planning its trajectory to the
goal before motion begins. The effect of varying sensor range
showed that it does not only affect the distance between the
mobile robot and obstacles and walls, but may also affect the
shape of the trajectory to the goal.
Finally, the numerical experiments demonstrated that the
indoor robot navigated successully in tight corridors, avoided
obstacles and dealt with a variety of world maps with various
irregular wall shapes that were presented to it.
REFERENCES
[3 ]
[4]
[5]
[6]
[7]
[10]
[11]
[12]
the
Fig. 17 Trajectory of the mobile robot in the global path planning mode
[2]
[9]
----'
xm,m
[1]
[8]
Transactions on control system technology, IEEE, Vo1.8, No.4, July
2000.
E. Papadopoulos and J. Poulakkis,"Trajectory Planning and Control
for Mobile Manipulator Systems", Proceedings 8th IEEE
Mediterranean Conference on Control & Automation (MED'OO), July
17-19, 2000, Patras, Greece.
ATLAB®, "The Language of Technical Computing-Getting Started
with MATLAB®/ Version 7.0", WWW.mathworks.com.
F. S. Khoshaba, "A Rule-Based System for Trajectory Planning of an
Indoor Mobile Robot," M.Sc. Thesis, Control & Systems Eng. Dept.,
University of Technology, 2005.
F. Dellaert, D. Fox, W. Burgrd and S. Thrun, "Monte Carlo
Localization for Mobile Robots (M CL", Proceedings IEEE con!
Robotics & Automation, pp.1322-1328, 1966.
c. Ferrari, E. Pagello, M. Voltolina, 1. Ota, and T. Arai, "Multirobot
Motion Coordination Using a Deliberative Approach", Proceedings of
J. Ashayeri, L. F. Gelders, and P. M. Van Looy, "Micro-Computer
Simulation In Design of Automated Guided Vehicle Systems", IEEE
Trans., pp.37-48, 1985.
D. Kortenkamp, R. P. Bonasso, and R. MuphY,"Artiiciallntelligence
and Mobile Robots", American Association for Articial Intelligence,
1998.
L . Heath, Fundamentals o f Robotics Theoy and Applications, Reston
Publishing Company, 1985.
B. L. Brumitt, R. C. Coulter, and R. Murphy, " Artiicial Intelligence
and Mobile Robots", MIT press, pp.3-20, 1998.
J. Laumond, "Robot Motion Planning and Control", LAAS-CNRS,
Toulouse, August 1997.
C. Canudas de Wit, B. Siciliano, G. Bastin (Eds.), Theoy of Robot
Control. Springer, Berlin, Heilderberg, New York, 1996.
D. Xiao, and B. K. Ghosh, "Sensor-Based Hybrid Position/Force
Control of a robot Manipulator in an Uncalibrated Environment",
Second
Euromicro
(EUROBOT'97),
Workshop
on
Avanced Mobile
October22-24, pp.96-103, 1997.
Robots
�