Abstract
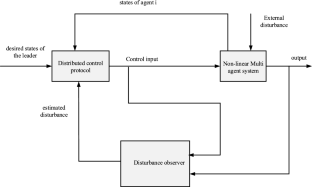
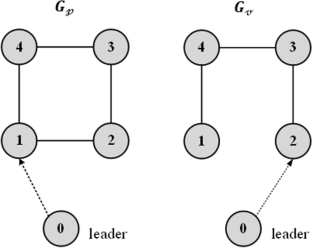
This paper proposes a novel distributed control algorithm for leader–follower tracking in nonlinear multi-agent systems via different velocity and position undirected graph topologies with external disturbance. Assuming that the disturbance is produced by linear exogenous systems, a disturbance observer without the position information based only on the velocity information of the agents is proposed. Next, graph theory, the Lyapunov approach and LaSalle’s principle are used to design a distributed control protocol for leader–follower tracking of MASs under different position and velocity undirected graphs with external disturbance. Finally, numerical simulations illustrate the efficacy of the proposed algorithms.






Similar content being viewed by others

Data Availability
The data used to support the findings of this study are available from the corresponding author upon request.
References
Cheng S, Jing L (2022) New conditions for consensus of second-order multi-agent systems. Iran J Sci Technol Trans Electr Eng 46(2):603–608
Cong Y, Du H, Liu B, Zhang P, Li X (2023) Distributed constrained finite-time consensus algorithm for second-order multi-agent systems. Inf Sci 626(1):773–786
Ding C, Li J, Jinsha L (2017) Distributed optimal consensus for multi-agent systems under independent position and velocity topology. J Dyn Syst Meas Control 139(10):1–8
Du H, Wen G, Wu D, Cheng Y, Lu J (2020) Distributed fixed-time consensus for nonlinear heterogeneous multi-agent systems. Automatica 113(113):1–13
Eddy Y, Gooi H, Chen S (2015) Multi-agent system for distributed management of microgrids. IEEE Trans Power Syst 30(1):24–34
Goldin D, Raisch J (2014) Consensus for agents with double integrator dynamics in heterogeneous networks. Asian J Control 16(1):30–39
Hamidi H (2018) An approach to intelligent traffic management system using a multi-agent system. Int J Intell Transp Syst Res 16(4):112–124
Hardy Y, Steeb W (2019) Matrix calculus, Kronecker product and tensor product: a practical approach to linear algebra, multilinear algebra and tensor calculus with software implementations, 3rd edn. World Scientific Publishing Company, Singapore
He S, Liu X, Lu P, Liu H, Du C (2022) Leader-follower finite-time consensus of multiagent systems with nonlinear dynamics by intermittent protocol. J Frankl Inst 359(6):2646–2662
Hong Y, Hu J, Gao L (2006) Tracking control for multi-agent consensus with an active leader and variable topology. Automatica 42(7):1177–1182
Hu J, Feng G (2010) Distributed tracking control of leader-follower multi-agent systems under noisy measurement. Automatica 46(8):1382–1387
Jenabzadeh A, Safarinejadian B (2019) Distributed tracking of nonholonomic targets over multi-agent systems. IEEE Syst J 13(2):1678–1681
Khodabandeh S, Kharrati H, Hashemzadeh F (2021) Control for leader-follower consensus of multi-agent systems with actuator faults using decentralized robust fault-tolerant control. Iran J Sci Technol Trans Electr Eng 45(2):529–541
Liu C, Tian Y (2009) Formation control of multi-agent systems with heterogeneous communication delays. Int J Syst Sci 40(6):627–636
Liu C, Shi Y, Meng Y, Wang Y (2023) Leader-following consensus of multi-agent systems with connectivity-mixed attacks and actuator/sensor faults. J Frankl Inst 360(5):3592–3617
Liu L, Luo C, Shen F (2017) Multi-agent formation control with target tracking and navigation. In: Proceedings of the 2017 IEEE international conference on information and automation (ICIA), Macao, China, pp 98–103
Lu MA, Wu J, Zhan X, Han, Yan H (2022) Consensus of second-order heterogeneous multi-agent systems with and without input saturation. ISA Trans 126(1):14–20
Luo X, Li X, Li S, Jiang Z, Guan X (2017) Flocking for multi-agent systems with optimally rigid topology based on information weighted Kalman consensus filter. Int J Control Autom Syst 15(1):138–148
Luo Z, Sun Z, Peng J, Ma F (2021) Distributed control of multi-agent systems via static feedback controllers under directed networks. Trans Inst Meas Control 43(2):464–472
Marina H, Jayawardhana B, Cao M (2016) Distributed rotational and translational maneuvering of rigid formations and their applications. IEEE Trans Robot 32(3):684–697
Mei J, Ren W, Ma G (2011) Distributed coordinated tracking with a dynamic leader for multiple Euler-Lagrange systems. IEEE Trans Autom Control 56(6):1415–1421
Misir O, Gokrem L (2021) Flocking-based self-organized aggregation behavior method for swarm robotics. Iran J Sci Technol Trans Electr Eng 45(4):1427–1444
Moradi M, Safarinejadian B, Shafiei M (2020) Distributed sliding mode leader-following consensus controller for uncertain time-delay linear parameter-varying multi-agent systems. J Vib Control 27(17):2136–2151
Morbidi F, Mariottini G (2013) Active target tracking and cooperative localization for teams of aerial vehicles. IEEE Trans Control Syst Technol 21(5):1694–1707
Nazarzehi V, Savkin A (2019) Decentralized three-dimensional formation building algorithms for a team of nonholonomic mobile agents. Int J Control Autom Syst 17(1):1–10
Olfati-Saber R (2006) Flocking for multi-agent dynamic systems: algorithms and theory. IEEE Trans Autom Control 51(3):401–420
Olfati-Saber R, Murray R (2004) Consensus problems in networks of agents with switching topology and time delays. IEEE Trans Autom Control 49(9):1520–1533
Omidi E, Mahmoodi N (2016) Active vibration control of structures using a leader–follower-based consensus design. J Vib Control 24(1):60–72
Qiaoping Li Yu, Chen KL (2023) Predefined-time formation control of the quadrotor-UAV cluster’ position system. Appl Math Model 116(1):45–64
Qin J, Yu C (2013) Coordination of multi-agent interacting under independent position and velocity topologies. IEEE Trans Neural Netw Learn Syst 24(10):1588–1597
Qin J, Ma Q, Shi Y, Wang L (2017) Recent advances in consensus of multi-agent systems: a brief survey. IEEE Trans Ind Electron 64(6):4972–4983
Rahimi N, Binazadeh T (2018) Distributed robust consensus control for nonlinear leader–follower multi-agent systems based on adaptive observer-based sliding mode. J Vib Control 25(1):109–121
Rezaee H, Abdollahi F (2014) A decentralized cooperative control scheme with obstacle avoidance for a team of mobile robots. IEEE Trans Ind Electron 61(1):347–354
Sun F, Wang R, Zhu W, Li Y (2019) Flocking in nonlinear multi-agent systems with time-varying delay via event-triggered control. Appl Math Comput 350(6):66–77
Tahoun A, Arafa M (2022) Adaptive leader–follower control for nonlinear uncertain multi-agent systems with an uncertain leader and unknown tracking paths. ISA Trans 131(3):61–72
Tanner H, Jadbabaie A, Pappas G (2007) Flocking in fixed and switching networks. IEEE Trans Autom Control 52(5):863–868
Tian B, Zuo Z, Wang H (2016) Leader-follower fixed-time consensus of multi-agent systems with high-order integrator dynamics. Int J Control 90(7):1420–1427
Wang M, Zhang T (2021) Leader-following formation control of second-order nonlinear systems with time-varying communication delay. Int J Control Autom Syst 19(5):1729–1739
Wang Y, Liu Y, Li X, Liang Y (2023) Distributed consensus tracking control based on state and disturbance observations for mixed-order multi-agent mechanical systems. J Frankl Inst 360(2):943–963
Wang J, Zhang L, Li J (2016) Iterative learning consensus control for multi-agent systems under independent position and velocity topologies. In: 2016 Chinese control and decision conference (CCDC), Yinchuan, China, pp 6609–6614
Wen G, Duan Z, Chen G et al (2014) Consensus tracking of multi-agent systems with Lipschitz-type node dynamics and switching topologies. IEEE Trans Circuits Syst I Regul Pap 61(2):499–511
Yan C, Fang H (2019) Observer-based distributed leader-follower tracking control: a new perspective and results. Int J Control 94(1):39–48
Yan Z, Yue L, Zhou J, Pan X, Zhang C (2023) Formation coordination control of leaderless multi-AUV system with double independent communication topology and nonconvex control input constraints. J Mar Sci Eng 11(1):1–22
Yao D, Li H, Lu R, Shi Y (2020) Distributed sliding-mode tracking control of second-order nonlinear multi-agent systems: an event-triggered approach. IEEE Trans Cybern 50(9):3892–3902
Zamanian M, Abollahi F, Nikravesh SK (2020) Finite-time consensus of heterogeneous unknown nonlinear multi-agent systems with external disturbances via event-triggered control. J Vib Control 27(15):1806–1823
Zhang X, Xianping L (2013) Further results on consensus of second-order multi-agent systems with exogenous disturbance. IEEE Trans Circuits Syst 60(12):3215–3226
Zhao J, Liu G (2018) Time-variant consensus tracking control for networked planar multi-agent systems with non-holonomic constraints. J Syst Sci Complex 31(2):396–418
Zhao Y, Duan Z, Wen G, Zhang Y (2013) Distributed finite-time tracking control for multi-agent systems: an observer-based approach. Syst Control Lett 62(1):22–28
Zhao X, Liu W, Yang C (2019) Coordination control for a class of multi-agent systems under asynchronous switching. J Syst Sci Complex 32(4):1019–1038
Zheng Y, Ma J, Wang L (2017) Consensus of Hybrid multi-agent systems. IEEE Trans Neural Netw Learn Syst 29(4):1359–1365
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declared no potential conflicts of interest concerning the research, authorship, and/or publication of this article.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ghasemzadeh, S.V., Safarinejadian, B. Leader–Follower Tracking in Nonlinear Multi-agent Systems via Different Velocity and Position Graph Topologies with External Disturbance. Iran J Sci Technol Trans Electr Eng 47, 1525–1536 (2023). https://doi.org/10.1007/s40998-023-00632-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40998-023-00632-7