Kies uw leveringslocatie
De keuze van de land/regio-pagina kan invloed hebben op verschillende factoren zoals prijs, verzendopties en beschikbaarheid van producten.Ga naar igus.be
De keuze van de land/regio-pagina kan invloed hebben op verschillende factoren zoals prijs, verzendopties en beschikbaarheid van producten.Bij het wisselen van pagina, zullen we proberen de artikelen in uw winkelwagentje af te stemmen op datgene wat beschikbaar is voor uw land.Controleer a.u.b. uw winkelwagentje na het wisselen, alvast bedankt!
Mijn contactpersoon
Selecteer locatie
Na selectie van uw postcode, wijzen wij u het relevante personeel toe dat u meteen van dienst is.
Bekijk alle contacten
De igus® Robot Control software
Gratis en licentievrij programmeren - simuleren - besturen van robots
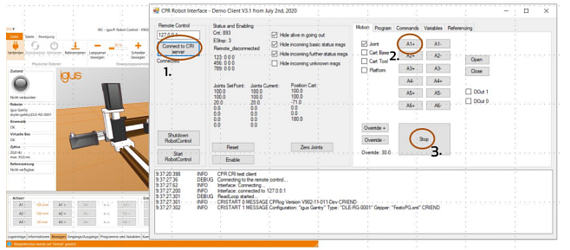
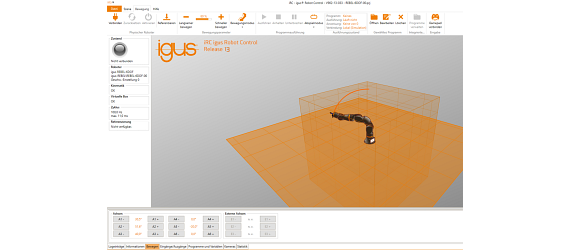
igus® Robot Control maakt eenvoudige en intuïtieve robotprogrammering, besturing en een laagdrempelige toegang tot automatisering mogelijk. Door het modulaire ontwerp kunnen verschillende robotkinematica worden aangestuurd, bijv. deltarobots, lineaire robots en meerassige gewrichtsrobots. De software kan worden gebruikt om de individuele bewegingen van de robot op de 3D-interface te simuleren - voor deze stap hoeft de robot niet te worden aangesloten.Inleiding tot automatisering met de intuïtieve robotsoftware als freeware
- Eenvoudige verbinding tussen robot en besturingssysteem
- Intuïtieve bediening met een 3D-oppervlak en digital twin maakt directe uitvoering en controle van de bewegingssequenties mogelijk
- Configuratie van camera-interface direct via besturingssysteem en software mogelijk
- Programmeren van delta-, lineaire robot-, SCARA- en knikarmrobots
- Gratis software maakt risicovrij testen mogelijk
Systeemvereisten:
- PC met Windows 10-besturingssysteem
- Communicatie via Ethernet of WLAN
- 500 MB vrije schijfruimte
Probeer de gratis software nu

Interfaces

PLC-interfaces
De PLC-interface maakt de uitvoering van basisfuncties en de signalering van toestanden door middel van digitale in- en uitgangen mogelijk. Naast de besturing door een PLC maakt deze interface ook bediening door hardwareknoppen mogelijk.Naar de PLC-wiki

Digitale in- en uitgangen
Robotprogramma's kunnen worden geladen en gestart en grijpercommando's kunnen worden verzonden via digitale ingangen of globale signalen. Dit is bijvoorbeeld handig als uit een bepaalde selectie een programma moet worden geselecteerd met behulp van knoppen of de CRI-GSig-instructie.Naar de I/O-wiki

Modbus-TCP/IP
PLC's kunnen bijvoorbeeld gegevens en instructies naar het robotbesturingssysteem sturen en statusinformatie ontvangen via de Modbus TCP-interface.Naar de TCP/IP-wiki
CRI-interface
De CRI-interface maakt het mogelijk om complexe instructies te verzenden en informatie en instellingen op te halen via de Ethernet-interface via TCP/IP. iRC gebruikt deze interface om verbinding te maken met robots met geïntegreerde besturingssystemen of andere instanties van iRC.Naar de CRI-wiki
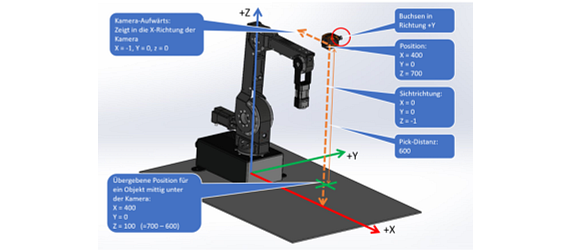
Camera-interface
De camera-interface maakt het gebruik van objectdetectie en videocamera's mogelijk. Objectdetectiecamera's herkennen de positie en klasse van objecten en geven deze, eventueel met videobeeld, door aan het besturingssysteem. Het besturingssysteem berekent posities in het robotcoördinatensysteem uit de objectposities van de camera. Pure videocamera's leveren alleen beelden en kunnen dus alleen worden gebruikt om het werkgebied te observeren, maar niet voor objectdetectie.Naar de wiki
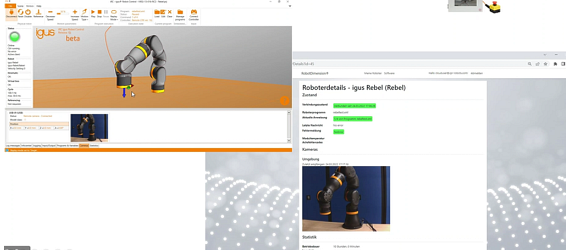
Cloud
De Cloud-interface maakt het mogelijk de robot te monitoren via RobotDimension. Na activering en inloggen stuurt de robot basisstatusinformatie en camerabeelden naar de online dienst. Op de website kan de gebruiker zijn robots opsommen en de informatie opvragen.
ROS, Matlab, LabView en nog veel meer.
Integreer de robots in uw ROS-omgeving. Documentatie en pakketten voor hardwarecommunicatie, Teleop en moveINaar de voorbeeldprogramma's
Projectconfiguraties
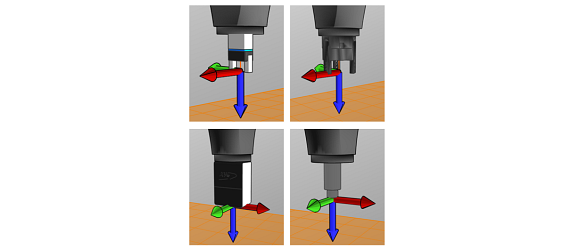
Grijper
De geïnstalleerde tool kan hier worden gespecificeerd. Als u de tool wijzigt, moet u het project opnieuw laden of het geïntegreerde besturingssysteem opnieuw opstarten. Nieuwe gereedschappen kunnen als configuratiebestand in de map "Data/Tools" worden gedefinieerdNaar de I/O-wiki
Virtueel object
De virtuele box instellingen beperken het bewegingsbereik van de robotarm. Deze functionaliteit helpt mechanische schade te voorkomen en vereenvoudigt de programmering afhankelijk van de toepassing. Als een programma wordt uitgevoerd dat het virtuele object raakt, wordt het gestopt met een foutmelding.Naar de Virtual Box-wiki
Externe assen
Het robotbesturingssysteem ondersteunt maximaal drie extra assen (ook wel "externe assen" genoemd in iRC). Deze kunnen worden geïnstalleerd volgens de robotassen en worden geconfigureerd via het configuratiegebied van iRC.Ga naar de Externe Assen-wiki

Programma's
Hier kunt u het robot- en logicaprogramma, de bewegingssnelheid (als percentage van de maximale snelheid), de afspeelmodus en de reactie op programmafouten instellen.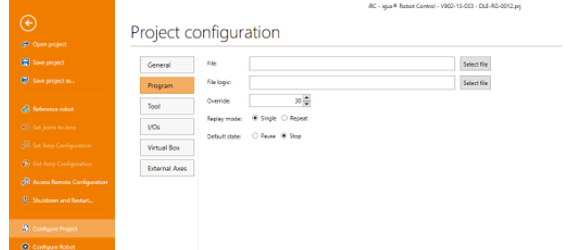
Speciale kinematica
Het robotbesturingssysteem kan individueel worden geconfigureerd voor uw robot met een digitale tweeling. We configureren de inverse kinematica om bij uw projectactiviteiten te passen.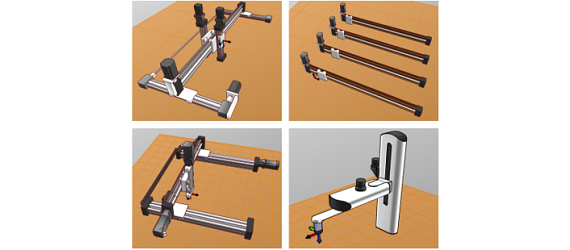
Programmeren
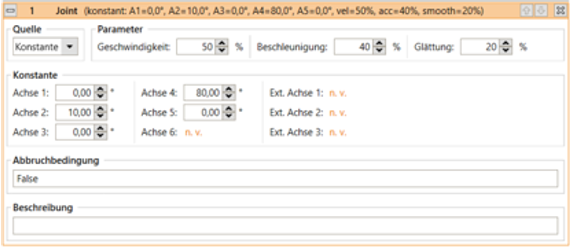
Asbewegingen
Het commando Gezamenlijk beweegt de robot naar een absolute doelpositie gespecificeerd in ascoördinaten (bijv. ashoek of positie van een lineaire as). De resulterende beweging van de TCP is meestal een curve en geen rechte lijn.
Lineaire beweging
Het commando Lineair verplaatst de robot naar een (absolute) doelpositie gespecificeerd in Cartesiaanse coördinaten. De resulterende beweging van de TCP volgt een rechte lijn.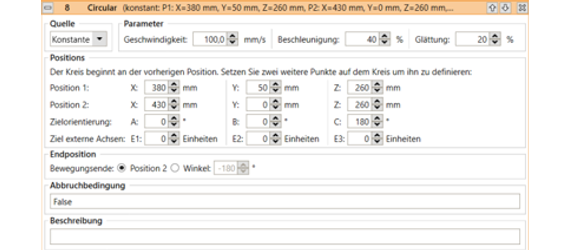
Cirkelvormige bewegingen
De instructie cirkelvormige beweging maakt bewegingen langs een volledige of gedeeltelijke cirkel mogelijk. Het is compatibel met lineaire bewegingen, zodat de overgang van en naar lineaire bewegingen vloeiend kan worden gemaakt.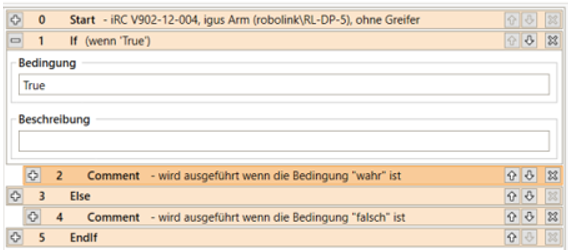
Voorwaarden
Voorwaarden kunnen worden gebruikt in if-then-else-commando's, loops en als beëindigingscondities in bewegingscommando's. De voorwaarden kunnen combinaties zijn van digitale ingangen, globale signalen, Booleaanse bewerkingen en vergelijkingen.
Matrixberekening
De rasterinstructies berekenen posities die zijn uitgelijnd met een raster, bijvoorbeeld als grijp- of plaatsingsposities voor palletiseertaken.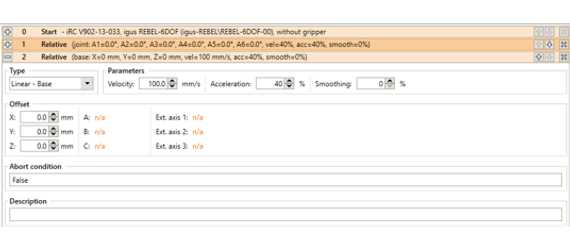
Relatief
Met het commando Relatief kan de robot ten opzichte van zijn huidige positie worden verplaatst. Dit commando kan worden opgeroepen via de menu-items onder "Actie" → "Relatieve beweging".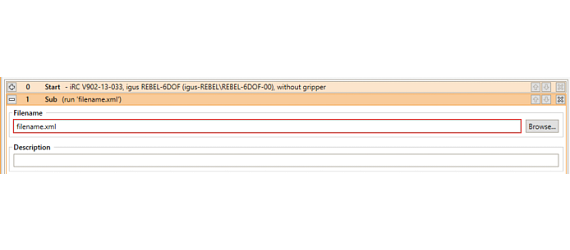
Subprogramma's
Subprogramma's kunnen worden opgeroepen met het commando Sub. Onder "Bestandsnaam" wordt het pad naar het subprogrammabestand aangegeven. Het is relatief ten opzichte van de "Programma's" submap van de iRC "Data" map.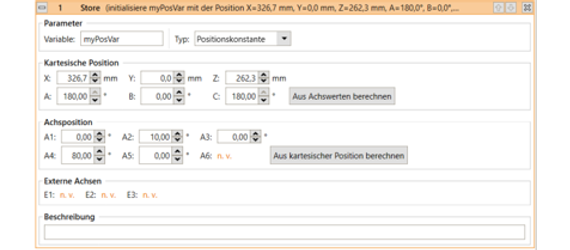
Variabelen en variabele toegang
Er worden twee soorten variabelen ondersteund in programma's voor iRC en TinyCtrl:- Numerieke variabelen: deze kunnen worden gebruikt om getallen met gehele getallen of drijvende komma's op te slaan.
- Positievariabelen: deze kunnen worden gebruikt om cartesiaanse posities en gewrichtsposities op te slaan. Of zo'n variabele wordt geïnterpreteerd als een cartesiaanse positie of een gezamenlijke positie, hangt af van de context.
Voorbeeldprogramma's
Bespaar tijd en geld met onze voorbeeldprogramma's:
Snellere integratie van igus® Robot Control voor uw machines door eenvoudige componenten en igus® voorbeeldprogramma's te combineren.
Snellere integratie van igus® Robot Control voor uw machines door eenvoudige componenten en igus® voorbeeldprogramma's te combineren.
- On-demand trainingsvideo's
- Mediabibliotheek met veel opleidingsvideo's
- Video's over elke toepassing van robotkinematica
- Alle inhoud beschikbaar op aanvraag
Naar de voorbeeldprogramma's

De igus® Robot Control software
Robotprogrammering kan niet gemakkelijker.Onze software maakt eenvoudige en intuïtieve robotprogrammering en -besturing mogelijk, waardoor het gemakkelijk wordt om met automatisering aan de slag te gaan. Door het modulaire ontwerp is het mogelijk om verschillende robotkinematica aan te sturen, bijvoorbeeld deltarobots, lineaire robots en meerassige gewrichtsrobots. Met de software kunnen gebruikers de individuele bewegingen van de robot op de 3D-interface simuleren.
Test de software nu gratis


Advies
Ik beantwoord graag uw vragen persoonlijk
Shipping and consultation
Persoonlijk:
Maandag t/m vrijdag van 8.00 uur - 20.00 uur.Op zaterdagen 8.00 uur tot - 12.00 uur.
Online:
24h
Winkelwagen
Het geselecteerde artikel is toegevoegd aan het winkelmandje, van waaruit u vragen of bestellingen kunt initiëren.
Let op: u kunt op igus.be alleen bestellen met een geldig Belgisch BTW-nummer. U kunt natuurlijk nog steeds de producten aanvragen.
Let op: u kunt op igus.be alleen bestellen met een geldig Belgisch BTW-nummer. U kunt natuurlijk nog steeds de producten aanvragen.
Winkelwagen
Het was niet mogelijk het geselecteerde artikel aan het winkelwagentje toe te voegen.