Veuillez sélectionner votre lieu de livraison
Le choix du site pays peut avoir un effet sur différents facteurs tels que le prix, les options de livraison et la disponibilité des produits.Vous quittez maintenant igus.fr
Le choix du site pays peut avoir un effet sur différents facteurs tels que le prix, les options de livraison et la disponibilité des produits.
Lors du changement du site web, nous essayons de voir l'équivalence entre les références se trouvant dans votre panier et les références disponibles pour votre pays.
Veuillez vérifier tout le contenu de votre panier après le changement. Merci!
Lors du changement du site web, nous essayons de voir l'équivalence entre les références se trouvant dans votre panier et les références disponibles pour votre pays.
Veuillez vérifier tout le contenu de votre panier après le changement. Merci!

Mon interlocuteur

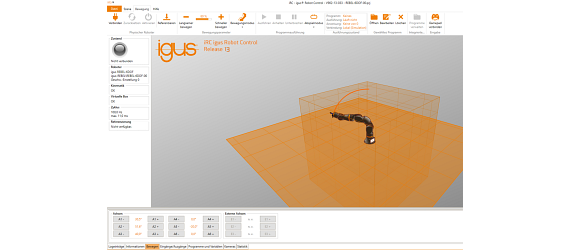
Logiciel igus® Robot Control
Programmation, simulation et pilotage de robots sans licence et gratuitement
Le logiciel igus® Robot Control permet la programmation et le pilotage simples et intuitifs d'un robot et, ainsi, un accès facile à l'automatisation. Sa structure modulaire permet de piloter différentes cinématiques de robot, par exemple des robots Delta, des portiques 1D et des robots à articulations pluriaxiales. Le logiciel permet de simuler les différents mouvements du robot sur l'interface 3D, le robot n'ayant pas besoin d'être raccordé pour cette opération.Accéder au monde de l'automatisation avec cette robotique intuitive gratuite
- Liaison simple entre le robot et la commande
- La commande intuitive avec interface 3D et jumeau numérique permet une exécution et une vérification directes des séquences de mouvements
- Configuration d'interface caméra directement par l'intermédiaire de la carte de pilotage et du logiciel
- Programmation de robots Delta, à portique, SCARA et à bras articulé
- Logiciel gratuit permettant d'essayer sans risque
Configuration requise :
- PC avec système d´exploitation Windows 10
- Communication par Ethernet ou WIFI
- 500 MB de mémoire libre
Tester le logiciel gratuitement

Interfaces

Interface API
L'interface API (aussi appelée interface PLC (PLC = Programmable Logic Controller)) permet l'exécution de fonctions de base et la signalisation d'états à l'aide d'entrées et de sorties numériques. Cette interface permet la commande par des boutons en plus du pilotage par un API.Wiki API

Entrées et sorties numériques
Des programmes de robots peuvent être chargés et lancés et des instructions pour des préhenseurs envoyées par l'intermédiaire d'entrées numériques ou de signaux globaux. Cela peut s'avérer utile lorsqu'un programme doit être choisi dans une sélection donnée à l'aide de boutons ou de l'instruction CRI-GSig par exemple.Wiki E/S

Modbus TCP/IP
L'interface Modbus TCP permet par exemple d'envoyer des données et instructions de l'API au pilotage du robot et de recevoir des informations relative à l'état.Wiki TCP/IP
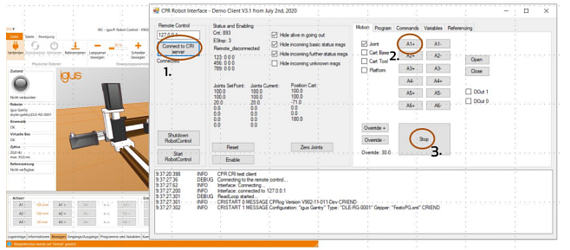
Interface CRI
L'interface CRI permet l'envoi d'instructions complexes et la récupération d'informations et de réglages par TCP/IP par l'intermédiaire de l'interface Ethernet. iRC utilise cette interface pour se connecter à des robots à pilotage intégré ou à d'autres instances d'iRC.Wiki CRI
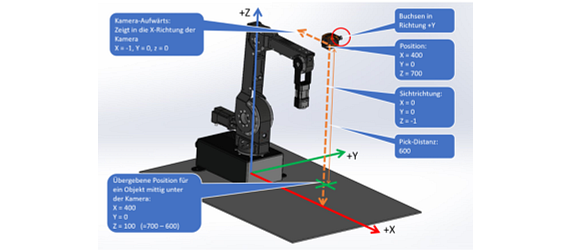
Interface caméra
L'interface caméra permet d'utiliser des caméras de reconnaissance d'objets et des caméras vidéo. Les caméras de reconnaissance d'objets reconnaissent la position et la catégorie d'objets et les transmettent au pilotage du robot, avec une image vidéo en option. Le pilotage du robot calcule des positions dans le système de coordonnées du robot à partir de la position des objets donnée par la caméra. Les caméras vidéo simples fournissent uniquement des photos et ne peuvent donc pas être utilisées pour la reconnaissance d'objets, juste pour l'observation du périmètre de travail.Wiki
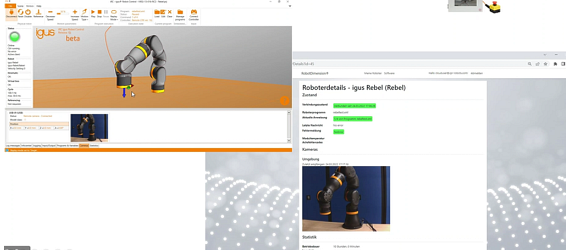
Cloud
L'interface cloud permet la surveillance du robot par l'intermédiaire de RobotDimension. Après l'activation et la connexion, le robot envoie au service en ligne des informations d'état de base et des photos de caméras. L'utilisateur peut faire une liste de ses robots sur le site web et consulter des informations.
ROS, Matlab, LabView, etc.
Intégrez votre robot à votre environnement ROS. Documentation et packs pour la communication matérielle, Teleop et moveIModèles de programmes
Configurations de projets
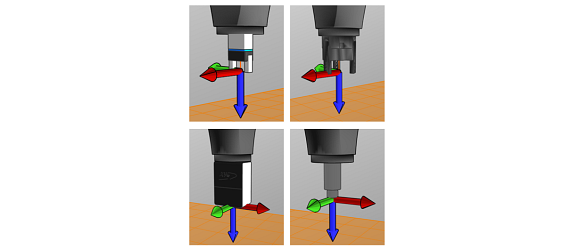
Pince
L'outil installé peut être spécifié ici. Le changement d'outil exige un rechargement du projet et/ou un redémarrage du contrôleur intégré. De nouveaux outils peuvent être définis dans le répertoire « Data/Tools » sous forme de fichier de configurationWiki E/S
Périmètre virtuel
Les réglages du périmètre virtuel permettent de limiter le périmètre de mouvement du bras. Cette fonctionnalité contribue à éviter les dommages mécaniques et facilite la programmation sur certaines applications. Tout programme qui sort du périmètre virtuel est arrêté dans son exécution et un message d'erreur est envoyé.Wiki Virtual Box
Axes externes
Le pilotage du robot prend en charge un maximum de 3 axes supplémentaires (également appelés « axes externes » dans iRC). Ils peuvent être installés en fonction des axes des robots et configurés dans la zone de configuration d'iRC.Wiki axes externes

Programmes
Ici, vous pouvez définir le programme du robot et de la logique, la vitesse de déplacement (en pourcentage de la vitesse maximale), le mode de lecture et la réaction à des erreurs de programme.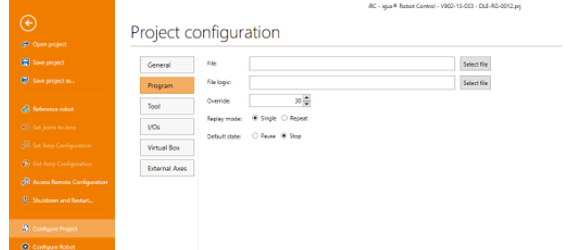
Cinématiques spéciales
La commande du robot peut être configurée avec un jumeau numérique pour votre robot. Nous vous configurons la cinématique inverse correspondant à votre projet.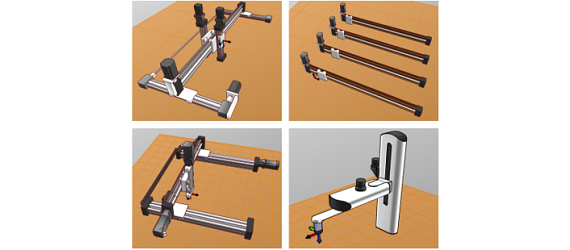
Programmation
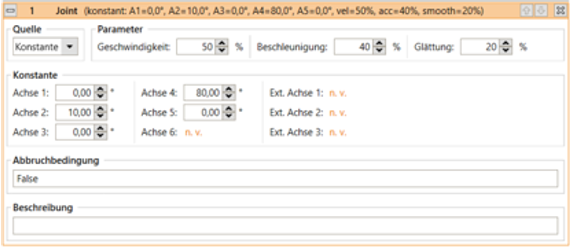
Mouvements des axes
L'instruction « Articulation » amène le robot à une position cible absolue qui est indiquée en coordonnées articulaires (angle d'un axe ou position d'un axe linéaire par exemple). Le mouvement du TCP qui en découle est en général une courbe et non une ligne droite.
Mouvement linéaire
L'instruction « Linéaire » amène le robot à une position cible absolue qui est indiquée en coordonnées cartésiennes. Le mouvement du TCP qui en découle suit une ligne droite.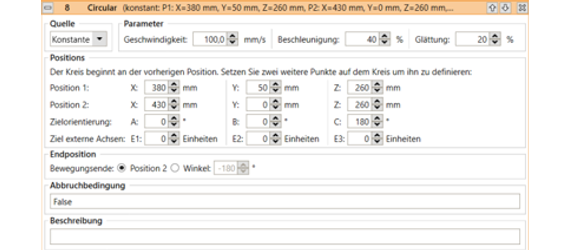
Mouvements circulaires
L'instruction « Mouvement circulaire » permet des mouvements le long d'une trajectoire en cercle complet ou partiel. Elle est compatible avec des mouvements linéaires et permet de lisser la transition en provenance de mouvements linéaires et vers des mouvements linéaires.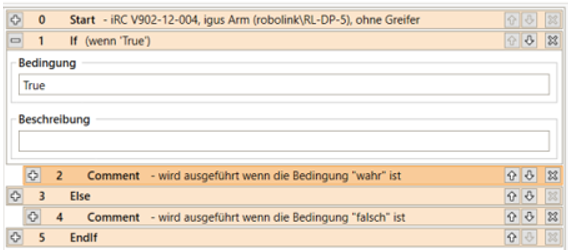
Conditions
Il est possible d'utiliser des conditions dans des instructions if-then-else, dans des boucles et pour l'abandon dans des commandes de mouvements. Les conditions peuvent être des combinaisons d'entrées numériques, de signaux globaux, d'opération booléennes et de comparaisons.
Calcul matriciel
Les instructions de quadrillage calculent des positions placées sur un quadrillage, par exemple des positions pour la préhension ou la dépose pour les tâches de palettisation.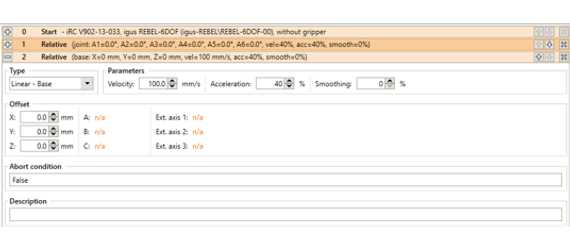
Relatif
L'instruction « Relatif » permet de déplacer le robot par rapport à sa position actuelle. L'accès à cette instruction se fait par le menu sous « Action » → « Mouvement relatif »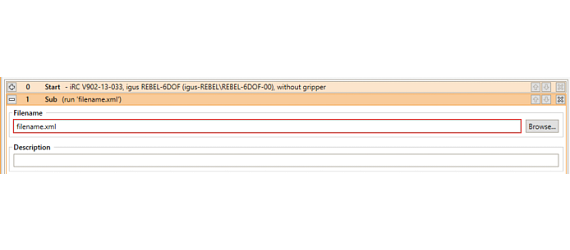
Sous-programmes
L'instruction « Sous » permet d'accéder à des sous-programmes. Le chemin d'accès au fichier du sous-programme est indiqué sous « nom de fichier ». Il est en relation avec le sous-répertoire « Programmes » du répertoire iRC « Données ».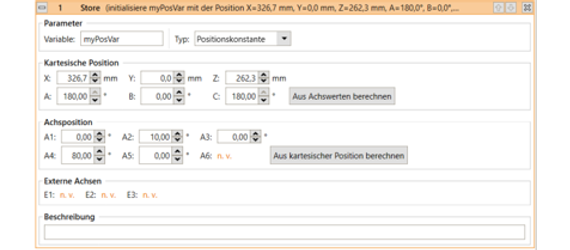
Variables et accès aux variables
Deux types de variables sont pris en charge dans les programmes pour iRC et TinyCtrl :- Variables numériques : elles peuvent être utilisées pour le stockage de nombres entiers ou à virgule flottante.
- Variables de position : elles peuvent être utilisées pour le stockage de positions cartésiennes et de positions articulaires. Qu'une telle variable soit interprétée comme position cartésienne ou position articulaire dépend du contexte.
Modèles de programmes
Gagnez du temps et faites des économies avec nos modèles de programmes :
Intégration plus rapide d'igus® Robot Control à vos machines par la combinaison de modules simples et de modèles de programmes igus®.
Intégration plus rapide d'igus® Robot Control à vos machines par la combinaison de modules simples et de modèles de programmes igus®.
- Vidéos de formation à la demande
- Médiathèque avec de nombreuses vidéos de formation
- Vidéos sur chaque cinématique de robot
- Contenus tous disponibles à la demande
Modèles de programmes

Conseil
Je me réjouis par avance de répondre à vos questions

Livraison et conseil technique
En personne :
Du lundi au vendredi de 8h à 20h. Le samedi de 8h à 12h à Cologne en Allemagne
En ligne :
24h/24
Panier
La référence choisie a été ajoutée au panier. Vous pouvez procéder à des demandes et commandes à partir de là.