Selezionare la località di consegna
La scelta della pagina del paese/regione può influire su diversi parametri, come prezzo, opzioni di spedizione e disponibilità del prodotto.Stai uscendo da igus.it
La scelta della pagina del paese/regione può influire su diversi parametri, come prezzo, opzioni di spedizione e disponibilità del prodotto.Durante il cambio delle pagine, cercheremo di associare gli articoli presenti nel carrello ai prodotti disponibili nel rispettivo paese.Dopo il cambio, verificare il proprio carrello. Grazie!
Il mio contatto
Seleziona luogo
Dopo aver selezionato il codice postale e la categoria di prodotto, vi indicheremo immediatamente la persona di riferimento per la vostra zona.
Vedi tutti i contatti
Programma gratuito per il controllo robot - igus Robot Control
Programma, simula e controlla il tuo robot
Gratuito! Nessuna registrazione o licenza richiesta
igus® Robot Control consente una programmazione e un controllo del robot semplici e intuitivi e un facile accesso all'automazione. Grazie alla struttura modulare, si possono controllare robot con diversi tipi di cinematica, come ad esempio robot a geometria delta, robot lineari e robot con giunti multiasse. Il software può essere utilizzato per simulare i singoli movimenti del robot sull'interfaccia 3D: non è necessario che il robot sia collegato per questo passaggio.Requisiti di sistema: PC con sistema operativo Windows 10, comunicazione tramite Ethernet o WLAN, 500 MB di spazio libero su disco
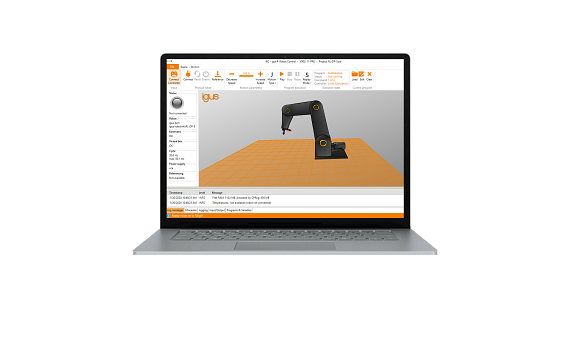
Introduzione all'automazione con l'intuitivo software robot come freeware
- Collegamento semplice tra robot e sistema di controllo
- Il funzionamento intuitivo tramite una interfaccia 3D e un gemello digitale consente l'esecuzione e il controllo diretto delle sequenze di movimento
- Possibilità di configurazione dell'interfaccia della telecamera direttamente tramite sistema di controllo e software
- Programmazione di robot a geometria delta, lineari, SCARA e con braccio articolato
- Il software libero consente test senza rischi
Ricevi ora il software gratuitamente
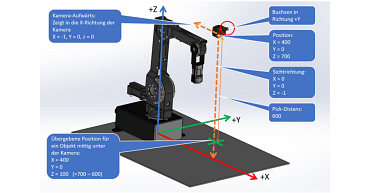
Movimenti semplici e complessi in pochi semplici passi - programmazione teach-in
La cosiddetta "programmazione teach-in" del robot si svolge con i seguenti passaggi:
1. Spostare il robot manualmente nelle posizioni desiderate che si vogliono registrare e salvare.
2. Registrare le posizioni e definire come devono essere spostate (lineare, movimento articolare, orientamento base o orientamento utensile).
3. Ripetere questi passaggi fino a quando non si è creato il profilo di movimento desiderato. È inoltre possibile completare il programma con comandi tramite ingressi e uscite digitali o comandi di flusso del programma. L'editor di programmi integrato è disponibile per l'impostazione e la modifica dei programmi.
1. Spostare il robot manualmente nelle posizioni desiderate che si vogliono registrare e salvare.
2. Registrare le posizioni e definire come devono essere spostate (lineare, movimento articolare, orientamento base o orientamento utensile).
3. Ripetere questi passaggi fino a quando non si è creato il profilo di movimento desiderato. È inoltre possibile completare il programma con comandi tramite ingressi e uscite digitali o comandi di flusso del programma. L'editor di programmi integrato è disponibile per l'impostazione e la modifica dei programmi.
Interfacce
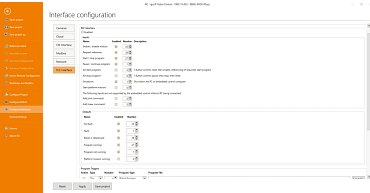
Interfacce per PLC
L'interfaccia per PLC permette l'esecuzione di funzioni di base e la segnalazione di stati mediante ingressi e uscite digitali. Oltre al controllo da parte di un PLC, questa interfaccia permette anche il funzionamento tramite pulsanti hardware.Vai alla Wiki SPS

Ingressi e uscite digitali
Mediante gli ingressi digitali o i segnali globali è possibile caricare e avviare i programmi del robot e inviare i comandi alla pinza. Ciò è utile, ad esempio, quando è necessario scegliere un programma da una determinata selezione utilizzando i pulsanti o l'istruzione CRI-GSig.Vai alla Wiki I/O
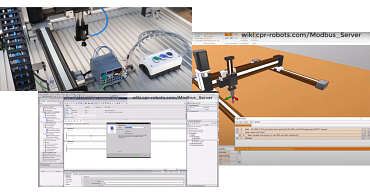
Modbus TCP/IP
Per esempio, i PLC possono inviare dati e istruzioni al sistema di controllo del robot e ricevere informazioni di stato tramite l'interfaccia Modbus TCP.Vai alla Wiki TCP/IP
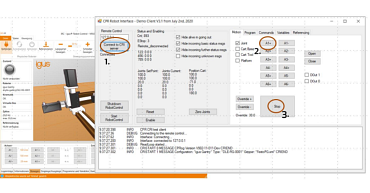
Interfaccia CRI
L'interfaccia CRI permette di inviare istruzioni complesse e di recuperare informazioni e impostazioni tramite l'interfaccia Ethernet mediante TCP/IP. iRC utilizza questa interfaccia per collegarsi a robot dotati di sistemi di controllo integrati o ad altre istanze di iRC.Vai alla Wiki CRI
Interfaccia per telecamera
L'interfaccia per telecamera permette di utilizzare il rilevamento di oggetti e le telecamere. Le telecamere per il rilevamento degli oggetti riconoscono la posizione e la classe degli oggetti e le trasmettono, eventualmente insieme a un'immagine video, al sistema di controllo.Vai alla Wiki
Cloud
L'interfaccia Cloud permette di monitorare il robot tramite RobotDimension. Dopo l'attivazione e il login, il robot invia le informazioni di base sullo stato e le immagini della telecamera al servizio online. L'utente può visualizzare i propri robot e richiamare le informazioni sul sito Internet.
ROS, Matlab, LabView e molti altri
Integrare i robot nel proprio ambiente ROS. Documentazione e pacchetti per la comunicazione hardware, Teleop e moveIVai ai programmi di esempio/campione
Configurazione di progetto

Pinza
L'utensile installato può essere specificato qui. Il cambio di utensile richiede il ricaricamento del progetto o il riavvio del sistema di controllo integrato. È possibile definire nuovi strumenti come file di configurazione nella cartella " Data/Tools"Vai alla Wiki I/O
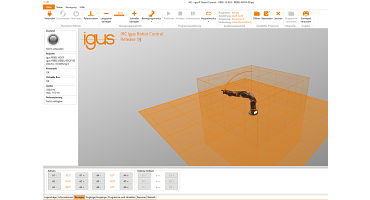
Virtual box
Le impostazioni della virtual box limitano il raggio di movimento del braccio del robot. Questa funzionalità aiuta a evitare danni meccanici e semplifica la programmazione in base all'applicazione. Se viene eseguito un programma che viola la virtual box, viene arrestato con un messaggio di errore.Vai alla Wiki sulla Virtual Box
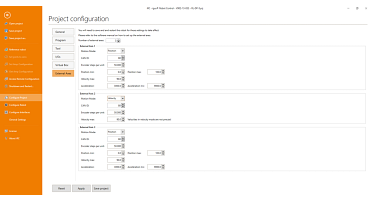
Assi esterni
Il sistema di controllo del robot supporta fino a tre assi aggiuntivi (chiamati anche "assi esterni" in iRC). Questi possono essere installati sulla base degli assi del robot e configurati tramite l'area di configurazione di iRC.Vai alla Wiki sugli Assi esterni
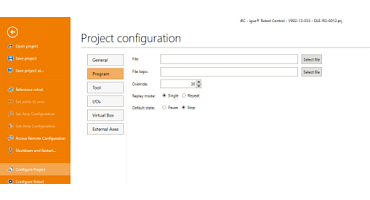
Programmi
Qui è possibile impostare il programma del robot e della logica, la velocità di movimento (come percentuale della velocità massima), la modalità di riproduzione e la reazione agli errori del programma.
Cinematica speciale
È possibile configurare individualmente il sistema di controllo del tuo robot mediante un gemello digitale. Configuriamo la cinematica inversa in modo che si adatti alle esigenze del tuo progetto.Programmazione
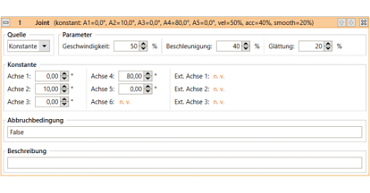
Movimenti degli assi
Il comando Joint porta il robot in una posizione di destinazione assoluta specificata in coordinate dell'asse (ad esempio, l'angolo dell'asse o la posizione di un asse lineare). Il movimento risultante del TCP solitamente è una curva e non una linea retta.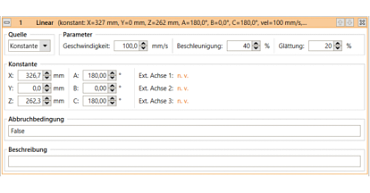
Movimento lineare
Il comando Linear porta il robot in una posizione di destinazione (assoluta) specificata in coordinate cartesiane. Il movimento risultante del TCP segue una linea retta.
Movimenti circolari
L'istruzione Circular Movement permette di effettuare movimenti lungo una circonferenza completa o parziale. È compatibile con i movimenti lineari, in modo che la transizione da e verso i movimenti lineari possa essere resa più fluida.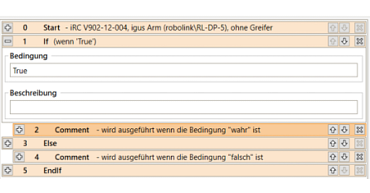
Condizioni
Le condizioni possono essere utilizzate nei comandi if-then-else, nei loop e come condizioni di stop nei comandi di movimento. Le condizioni possono essere costituite da combinazioni di ingressi digitali, segnali globali, operazioni booleane e confronti.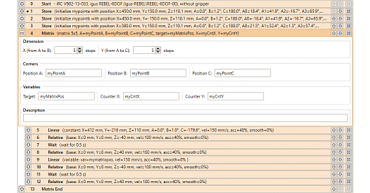
Calcolo della matrice
Le istruzioni "grid" relative alla griglia calcolano le posizioni allineate con una griglia, come ad esempio le posizioni di presa o di deposito per le operazioni di pallettizzazione.
Movimento relativo
Il comando Relative permette di spostare il robot relativamente alla sua posizione attuale. Può essere richiamato tramite le voci di menu "Action" → "Relative movement".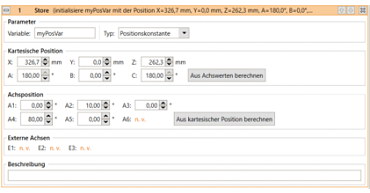
Variabili e accesso alle variabili
I programmi per iRC e TinyCtrl supportano due tipi di variabili:- Variabili numeriche: possono essere utilizzate per memorizzare numeri interi o in virgola mobile.
- Variabili di posizione: possono essere utilizzate per memorizzare posizioni cartesiane e posizioni degli assi. L'interpretazione di una tale variabile come posizione cartesiana o come posizione degli assi dipende dal contesto.
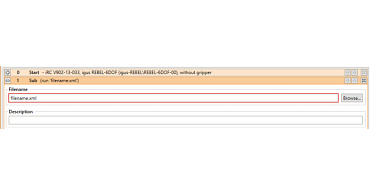
Sottoprogrammi
I sottoprogrammi possono essere richiamati mediante il comando Sub. Il percorso in cui si trova il file del sottoprogramma è specificato in "File name". È relativo alla sottocartella "Programs" della cartella "Data" di IRC.Programmi campione
Risparmio di tempo e denaro grazie ai nostri programmi esempio:Integrazione più rapida di igus® Robot Control sulle macchine, combinando componenti semplici e programmi esempio igus®.
- Video di formazione su richiesta
- Mediateca con numerosi video per la formazione
- Video di applicazioni per ogni cinematica robotica
- Tutti i contenuti sono disponibili su richiesta
Vai ai programmi campione


Richieste e ordini
L'articolo selezionato è stato posto nel carrello.
Potete ora inviare una richiesta d'offerta o un ordine.
Potete ora inviare una richiesta d'offerta o un ordine.