4本脚から蛇に――「変形合体ロボ」見参(1/2 ページ)
4本脚で歩いたと思ったら蛇に変型し、しばらくはうとバラバラになる――独立行政法人・産業総合研究所 分散システムデザイン研究グループは、複数のモジュールを組み合わせてボディを形作り、さまざまな形に変型できる“変型合体ロボット”「M-TRAN III」を開発した。
 クリックするとムービーを再生します(MPEG-1)
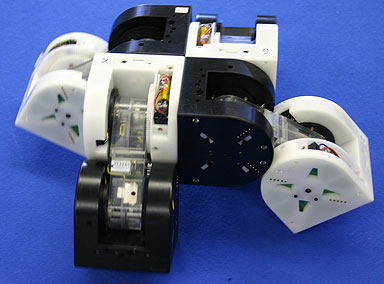
クリックするとムービーを再生します(MPEG-1)モジュール4つを放射状に組み合わせれば4足歩行ロボになり、ゆったりと歩きだす。障害物は避けて進むし、裏返すと少しばたついた後起き上がる。動きは虫か動物のようで、生きているような気さえする。
変形シーンはロボットっぽい。モーターを「ウィーン」とうならせ、一部モジュールが接続部を軸に回転。不要な結合部のツメがはずれ、必要な結合部にツメをひっかけて新たな形に変わる。
蛇になったりクモになったり犬になったり――組み合わせるモジュールの数によって、さまざまな形に変わる。キャタピラ型に組めば回転しながら移動できるし、いくつかのモジュールを土台にして徐々に上に上っていく、という動きも可能だ。
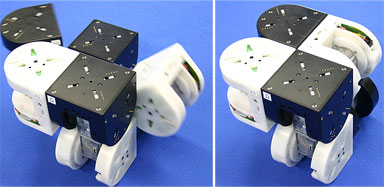 4本脚から蛇に変型中の1シーン
4本脚から蛇に変型中の1シーン 蛇化完了
蛇化完了「M-TRAN」シリーズは、同グループが1998年から開発を続けてきたロボット(関連記事参照)。研究の目標は、自律分散システムの“見える化”だ。
「自律分散といえばコンピュータシステムが思いつくが、実体が見えない。実体のある自律分散システムを作りたい」――黒河治久研究グループ長は狙いをこう語る。究極の目標は、生物の細胞のように自律的に働き、自己修復できるシステムだ。
変型合体の仕組みは
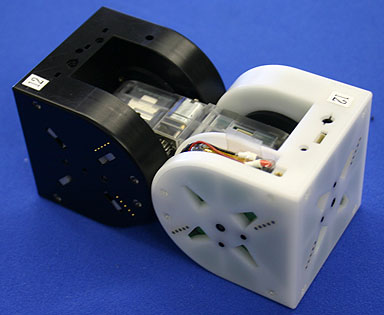
M-TRAN IIIの各モジュールは、かまぼこ型のパーツが2つ組み合わさった形状で、接続部を軸に180度曲がる。それぞれCPU×4つと赤外線センサー、加速度センサー、Bluetooth通信機能、モーター、電池を装備。サイズは65×65×130ミリ、重さは420グラムと、手に持つとずっしり重い。
6個の平面部はすべて着脱可能。ツメをひっかけて約5秒ほどで着脱できる。複数のモジュールを組み合わせると、ネットワークがつながり、隣接するモジュールとデータ交換を始める。
 モジュール
モジュール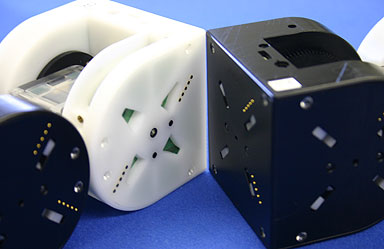 黒いパーツからツメが出て、白いパーツの穴にひっかける。同時にネットワークも接続される
黒いパーツからツメが出て、白いパーツの穴にひっかける。同時にネットワークも接続されるCopyright © ITmedia, Inc. All Rights Reserved.
Special
PR

![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。