The Influence of Geostatistical Prior Modeling on the Solution of DCT-Based Bayesian Inversion: A Case Study from Chicken Creek Catchment


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Study Area and Measurements
3. Modeling Framework
3.1. EMI Forward Model
3.2. Discrete Cosine Transform
3.3. Structured Grids and DCT Parametrization
4. Probabilistic Inversion
4.1. Prior Distribution
4.2. Likelihood Function
4.3. Posterior Distribution
5. Results and Discussion
5.1. EMI and ERT Data
5.2. MPS Simulation Results
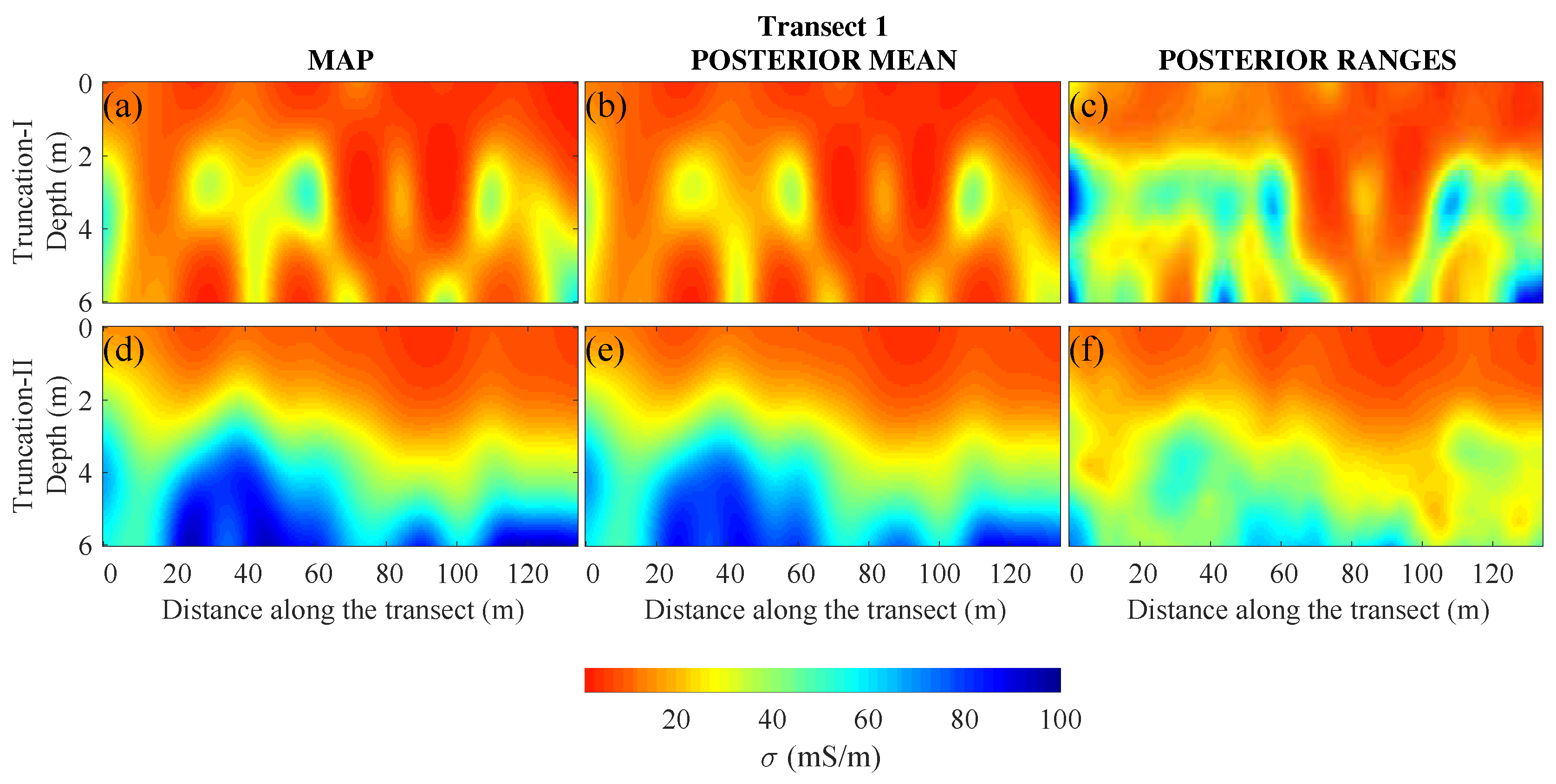
5.3. Transect 1: Inversion Results
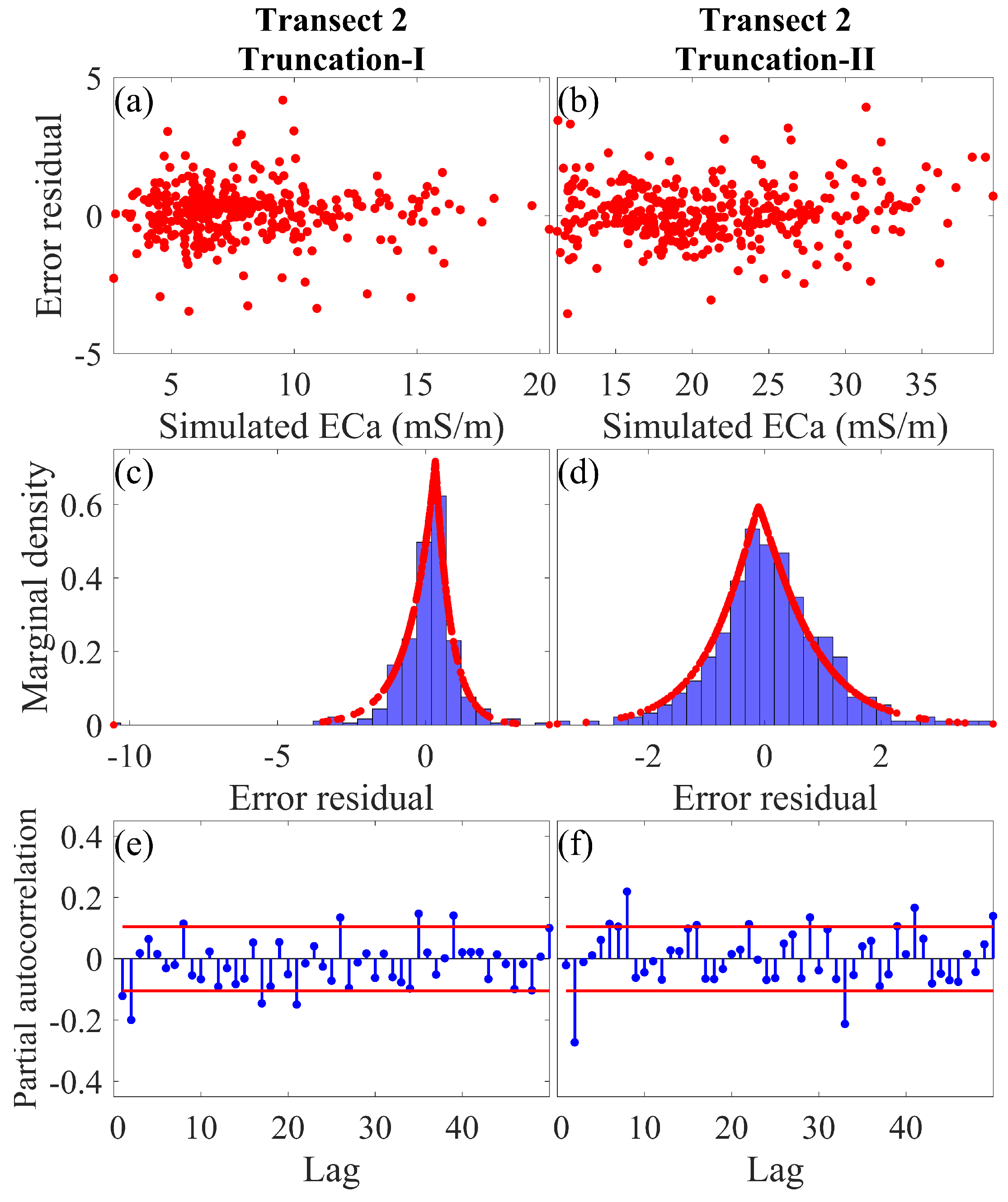
5.4. Transect 2: Inversion Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Generalized Likelihood Function
References
- Bradford, J.H.; Clement, W.P.; Barrash, W. Estimating porosity with ground-penetrating radar reflection tomography: A controlled 3-D experiment at the Boise Hydrogeophysical Research Site. Water Resour. Res. 2009, 45, 11. [Google Scholar] [CrossRef]
- Yao, R.J.; Yang, J.S. Quantitative evaluation of soil salinity and its spatial distribution using electromagnetic induction method. Agric. Water Manag. 2010, 97, 1961–1970. [Google Scholar] [CrossRef]
- Andre, F.; van Leeuwen, C.; Saussez, S.; Van Durmen, R.; Bogaert, P.; Moghadas, D.; de Resseguier, L.; Delvaux, B.; Vereecken, H.; Lambot, S. High-resolution imaging of a vineyard in south of France using ground-penetrating radar, electromagnetic induction and electrical resistivity tomography. J. Appl. Geophys. 2012, 78, 113–122. [Google Scholar] [CrossRef]
- Dafflon, B.; Hubbard, S.; Ulrich, C.; Peterson, J.E. Electrical Conductivity Imaging of Active Layer and Permafrost in an Arctic Ecosystem, through Advanced Inversion of Electromagnetic Induction Data. Vadose Zone J. 2013, 12. [Google Scholar] [CrossRef]
- Von Hebel, C.; Rudolph, S.; Mester, A.; Huisman, J.A.; Kumbhar, P.; Vereecken, H.; van der Kruk, J. Three-dimensional imaging of subsurface structural patterns using quantitative large-scale multiconfiguration electromagnetic induction data. Water Resour. Res. 2014, 50, 2732–2748. [Google Scholar] [CrossRef] [Green Version]
- Jadoon, K.Z.; Weihermuller, L.; McCabe, M.F.; Moghadas, D.; Vereecken, H.; Lambot, S. Temporal Monitoring of the Soil Freeze-Thaw Cycles over a Snow-Covered Surface by Using Air-Launched Ground-Penetrating Radar. Remote. Sens. 2015, 7, 12041–12056. [Google Scholar] [CrossRef] [Green Version]
- Moghadas, D.; Jadoon, K.Z.; McCabe, M.F. Spatiotemporal monitoring of soil water content profiles in an irrigated field using probabilistic inversion of time-lapse EMI data. Adv. Water Resour. 2017, 110, 238–248. [Google Scholar] [CrossRef] [Green Version]
- Robinson, D.A.; Lebron, I.; Kocar, B.; Phan, K.; Sampson, M.; Crook, N.; Fendorf, S. Time-lapse geophysical imaging of soil moisture dynamics in tropical deltaic soils: An aid to interpreting hydrological and geochemical processes. Water Resour. Res. 2009, 45. [Google Scholar] [CrossRef]
- Triantafilis, J.; Santos, F.A.M. Resolving the spatial distribution of the true electrical conductivity with depth using EM38 and EM31 signal data and a laterally constrained inversion model. Aust. J. Soil Res. 2010, 48, 434–446. [Google Scholar] [CrossRef]
- Moghadas, D.; Andre, F.; Bradford, J.H.; van der Kruk, J.; Vereecken, H.; Lambot, S. Electromagnetic induction antenna modelling using a linear system of complex antenna transfer functions. Near Surf. Geophys. 2012, 10, 237–247. [Google Scholar] [CrossRef]
- Huang, J.; Taghizadeh-Mehrjardi, R.; Minasny, B.; Triantafilis, J. Modeling Soil Salinity along a Hillslope in Iran by Inversion of EM38 Data. Soil Sci. Soc. Am. J. 2015, 79, 1142–1153. [Google Scholar] [CrossRef]
- Huang, J.; Scudiero, E.; Clary, W.; Corwin, D.L.; Triantafilis, J. Time-lapse monitoring of soil water content using electromagnetic conductivity imaging. Soil Use Manag. 2016, 33, 191–204. [Google Scholar] [CrossRef]
- Mester, A.; van der Kruk, J.; Zimmermann, E.; Vereecken, H. Quantitative Two-Layer Conductivity Inversion of Multi-Configuration Electromagnetic Induction Measurements. Vadose Zone J. 2011, 10, 1319–1330. [Google Scholar] [CrossRef]
- Robinet, J.; von Hebel, C.; Govers, G.; van der Kruk, J.; Minella, J.P.G.; Schlesner, A.; Ameijeiras-Marino, Y.; Vanderborght, J. Spatial variability of soil water content and soil electrical conductivity across scales derived from Electromagnetic Induction and Time Domain Reflectometry. Geoderma 2018, 314, 160–174. [Google Scholar] [CrossRef]
- Jadoon, K.Z.; Moghadas, D.; Jadoon, A.; Missimer, T.M.; Al-Mashharawi, S.K.; McCabe, M.F. Estimation of soil salinity in a drip irrigation system by using joint inversion of multicoil electromagnetic induction measurements. Water Resour. Res. 2015, 51, 3490–3504. [Google Scholar] [CrossRef] [Green Version]
- Triantafilis, J.; Monteiro Santos, F.A. Electromagnetic conductivity imaging (EMCI) of soil using a DUALEM-421 and inversion modelling software (EM4Soil). Geoderma 2013, 211–212, 28–38. [Google Scholar] [CrossRef]
- Christiansen, A.V.; Pedersen, J.B.; Auken, E.; Soe, N.E.; Holst, M.K.; Kristiansen, S.M. Improved Geoarchaeological Mapping with Electromagnetic Induction Instruments from Dedicated Processing and Inversion. Remote. Sens. 2016, 8, 1022. [Google Scholar] [CrossRef]
- Auken, E.; Christiansen, A.V.; Kirkegaard, C.; Fiandaca, G.; Schamper, C.; Behroozmand, A.A.; Binley, A.; Nielsen, E.; Efferso, F.; Christensen, N.B.; et al. An overview of a highly versatile forward and stable inverse algorithm for airborne, ground-based and borehole electromagnetic and electric data. Explor. Geophys. 2015, 46, 223–235. [Google Scholar] [CrossRef] [Green Version]
- Minsley, B.J. A trans-dimensional Bayesian Markov chain Monte Carlo algorithm for model assessment using frequency-domain electromagnetic data. Geophys. J. Int. 2011, 187, 252–272. [Google Scholar] [CrossRef] [Green Version]
- Jadoon, K.Z.; Altaf, M.U.; McCabe, M.F.; Hoteit, I.; Muhammad, N.; Moghadas, D.; Weihermuller, L. Inferring soil salinity in a drip irrigation system from multi-configuration EMI measurements using adaptive Markov chain Monte Carlo. Hydrol. Earth Syst. Sci. 2017, 21, 5375–5383. [Google Scholar] [CrossRef] [Green Version]
- Vrugt, J.A.; Ter Braak, C.J.F.; Diks, C.G.H.; Robinson, B.A.; Hyman, J.M.; Higdon, D. Accelerating Markov chain Monte Carlo simulation by differential evolution with self-adaptive randomized subspace sampling. Int. J. Nonlinear Sci. Numer. Simul. 2009, 10, 273–290. [Google Scholar] [CrossRef]
- Linde, N.; Vrugt, J.A. Distributed Soil Moisture from Crosshole Ground-Penetrating Radar Travel Times using Stochastic Inversion. Vadose Zone J. 2013, 12, 16. [Google Scholar] [CrossRef]
- Qin, H.; Xie, X.Y.; Vrugt, J.A.; Zeng, K.; Hong, G. Underground structure defect detection and reconstruction using crosshole GPR and Bayesian waveform inversion. Autom. Constr. 2016, 68, 156–169. [Google Scholar] [CrossRef] [Green Version]
- Moghadas, D. Probabilistic Inversion of Multiconfiguration Electromagnetic Induction Data Using Dimensionality Reduction Technique: A Numerical Study. Vadose Zone J. 2019, 18. [Google Scholar] [CrossRef]
- Lochbuhler, T.; Vrugt, J.A.; Sadegh, M.; Linde, N. Summary statistics from training images as prior information in probabilistic inversion. Geophys. J. Int. 2015, 201, 157–171. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, N.; Natarajan, T.; Rao, K.R. Discrete cosine transform. IEEE Trans. Comput. 1974, C 23, 90–93. [Google Scholar] [CrossRef]
- Gerwin, W.; Schaaf, W.; Biemelt, D.; Fischer, A.; Winter, S.; Huttl, R.F. The artificial catchment “Chicken Creek” (Lusatia, Germany)-A landscape laboratory for interdisciplinary studies of initial ecosystem development. Ecol. Eng. 2009, 35, 1786–1796. [Google Scholar] [CrossRef]
- Schaaf, W.; Pohle, I.; Maurer, T.; Gerwin, W.; Hinz, C.; Badorreck, A. Water Balance Dynamics during Ten Years of Ecological Development at Chicken Creek Catchment. Vadose Zone J. 2017, 16. [Google Scholar] [CrossRef]
- Loke, M.H.; Acworth, I.; Dahlin, T. A comparison of smooth and blocky inversion methods in 2D electrical imaging surveys. Explor. Geophys. 2003, 34, 182–187. [Google Scholar] [CrossRef]
- Wait, J.R. Mutual coupling of loops lying on the ground. Geophysics 1954, 19, 290–296. [Google Scholar] [CrossRef]
- Ward, S.H.; Hohmann, G.W. Electromagnetic theory for geophysical application. In Electromagnetic Methods in Applied Geophysics; Investigations in Geophysics Series; Nabighian, M.N., Ed.; Society of Exploration Geophysicists: Tulsa, OK, USA, 1987; Volume 1, pp. 131–312. ISBN 978-1-56080-263-1. [Google Scholar]
- Van der Kruk, J.; Meekes, J.A.C.; van den Berg, P.M.; Fokkema, J.T. An apparent-resistivity concept for low-frequency electromagnetic sounding techniques. Geophys. Prospect. 2000, 48, 1033–1052. [Google Scholar] [CrossRef]
- Jafarpour, B.; Goyal, V.K.; McLaughlin, D.B.; Freeman, W.T. Transform-domain sparsity regularization for inverse problems in geosciences. Geophysics 2009, 74, R69–R83. [Google Scholar] [CrossRef]
- Mariethoz, G.; Renard, P.; Straubhaar, J. The Direct Sampling method to perform multiple-point geostatistical simulations. Water Resour. Res. 2010, 46, 14. [Google Scholar] [CrossRef]
- Meerschman, E.; Pirot, G.; Mariethoz, G.; Straubhaar, J.; Van Meirvenne, M.; Renard, P. A practical guide to performing multiple-point statistical simulations with the Direct Sampling algorithm. Comput. Geosci. 2013, 52, 307–324. [Google Scholar] [CrossRef]
- Volpi, E.; Schoups, G.; Firmani, G.; Vrugt, J.A. Sworn testimony of the model evidence: Gaussian Mixture Importance (GAME) sampling. Water Resour. Res. 2017, 53, 6133–6158. [Google Scholar] [CrossRef] [Green Version]
- Schoups, G.; Vrugt, J.A. A formal likelihood function for parameter and predictive inference of hydrologic models with correlated, heteroscedastic, and non-Gaussian errors. Water Resour. Res. 2010, 46, 17. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Massoud, E.M. Uncertainty quantification of complex system models: Bayesian Analysis. In Handbook of Hydrometeorological Ensemble Forecasting; Duan, Q., Pappenberger, F., Thielen, J., Wood, A., Cloke, H.L., Schaake, J.C., Eds.; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Laloy, E.; Vrugt, J.A. High-dimensional posterior exploration of hydrologic models using multiple-try DREAM((ZS)) and high-performance computing. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Laloy, E.; Rogiers, B.; Vrugt, J.A.; Mallants, D.; Jacques, D. Efficient posterior exploration of a high-dimensional groundwater model from two- stage Markov chain Monte Carlo simulation and polynomial chaos expansion. Water Resour. Res. 2013, 49, 2664–2682. [Google Scholar] [CrossRef]
- Rosas-Carbajal, M.; Linde, N.; Kalscheuer, T.; Vrugt, J.A. Two-dimensional probabilistic inversion of plane-wave electromagnetic data: Methodology, model constraints and joint inversion with electrical resistivity data. Geophys. J. Int. 2014, 196, 1508–1524. [Google Scholar] [CrossRef]
- Gelman, A.; Rubin, D.B. Inference from Iterative Simulation Using Multiple Sequences. Statist. Sci. 1992, 7, 457–472. [Google Scholar] [CrossRef]
- Vrugt, J.A. Markov chain Monte Carlo simulation using the DREAM software package: Theory, concepts, and MATLAB implementation. Environ. Model. Softw. 2016, 75, 273–316. [Google Scholar] [CrossRef] [Green Version]
- Box, G.; Tiao, G. Bayesian Inference in Statistical Analysis; John Wiley: New York, NY, USA, 1992; p. 588. [Google Scholar]
- Fernandez, C.; Steel, M.F.J. On Bayesian modeling of fat tails and skewness. J. Am. Stat. Assoc. 1998, 93, 359–371. [Google Scholar] [CrossRef]












© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moghadas, D.; Vrugt, J.A. The Influence of Geostatistical Prior Modeling on the Solution of DCT-Based Bayesian Inversion: A Case Study from Chicken Creek Catchment. Remote Sens. 2019, 11, 1549. https://doi.org/10.3390/rs11131549
Moghadas D, Vrugt JA. The Influence of Geostatistical Prior Modeling on the Solution of DCT-Based Bayesian Inversion: A Case Study from Chicken Creek Catchment. Remote Sensing. 2019; 11(13):1549. https://doi.org/10.3390/rs11131549
Chicago/Turabian StyleMoghadas, Davood, and Jasper A. Vrugt. 2019. "The Influence of Geostatistical Prior Modeling on the Solution of DCT-Based Bayesian Inversion: A Case Study from Chicken Creek Catchment" Remote Sensing 11, no. 13: 1549. https://doi.org/10.3390/rs11131549