
DB-Tracker: Multi-Object Tracking for Drone Aerial Video Based on Box-MeMBer and MB-OSNet


Abstract
:1. Introduction
- Multi-object tracking framework DB-Tracker based on detection and RFS: To achieve the combination of location information and appearance features, we utilize the label generalized multi-Bernoulli filter to collect the object’s position information and MB-OSNet to extract the object’s appearance features. Synthetic matching provides better resistance to occlusions and nonlinear motion.
- Box-MeMBer: To better adapt to nonlinear systems and object motion patterns, a nonlinear motion model and a nonlinear observation model are employed for multi-object tracking using the stochastic finite set method based on multi-Bernoulli filtering. Simultaneously, the observation likelihood function is computed using the expected object state to eliminate the negative impacts of object superposition on the observation update.
- MB-OSNet: We created MB-OSNet, introduced a multi-scale feature extraction module, and implemented a dense connection structure and multi-scale feature aggregation technique. By connecting the feature maps of different levels in layers, the network can obtain rich semantic information at different scales, improve the network’s perception of object features at different scales, and reduce information loss.
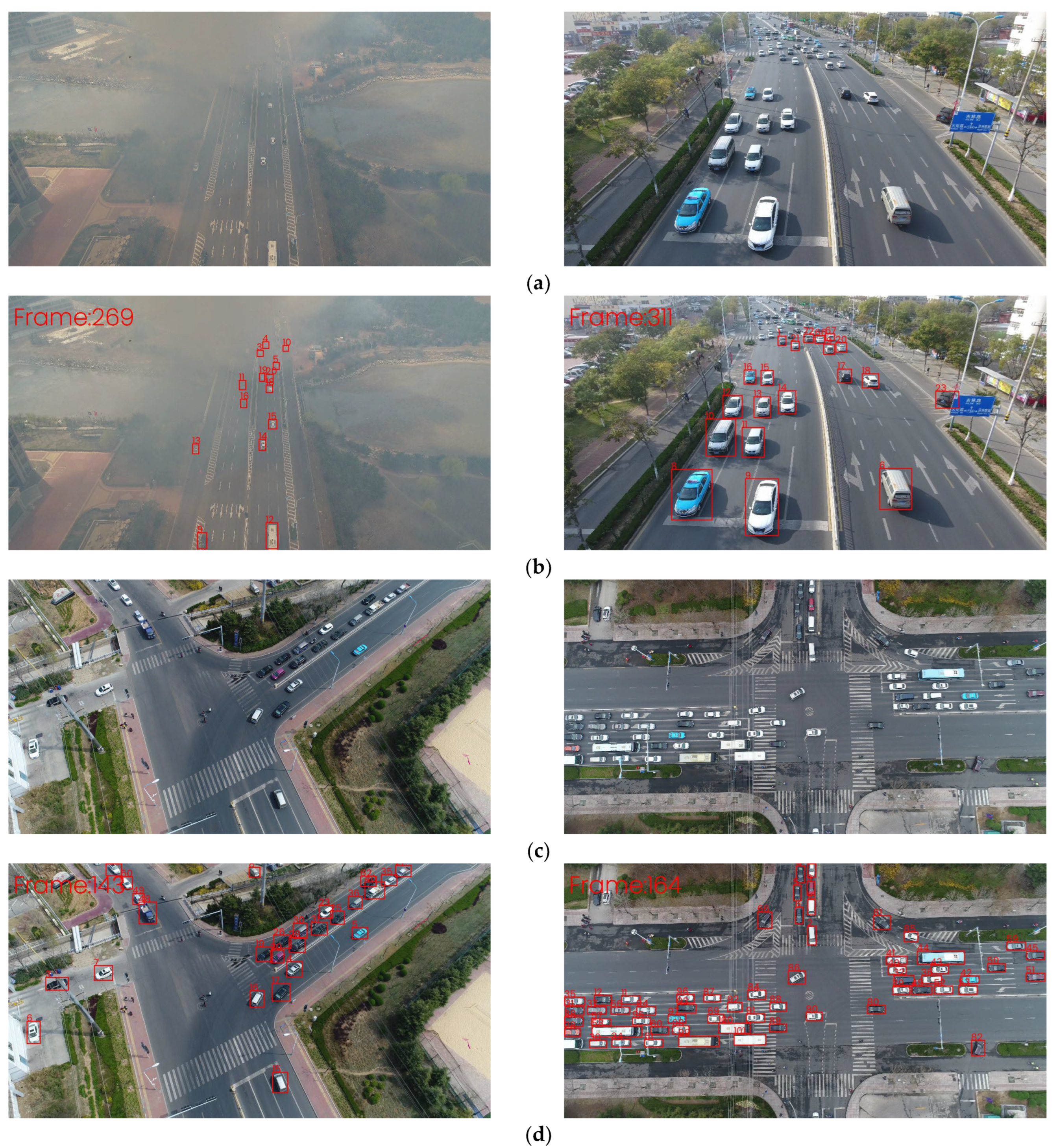
- Verification and comparison of VisDrone and UAVDT datasets: We verified the effectiveness of VisDrone and UAVDT datasets, obtaining 37.4% and 46.2% MOTA, respectively. Simultaneously, the results show that our algorithm is effective when compared with the eight latest multi-object tracking algorithms. At the same time, we used a DJI mini3 to capture 1080p footage with varied viewing angles, altitudes, occlusions, and so on to test the algorithm’s robustness.
2. Related Work
2.1. Detection-Based Multi-Object Tracking
2.2. RFS-Based Multi-Object Tracking
2.3. Fusion of Detection-Based and RFS-Based Multi-Object Tracking
3. Methods
3.1. Box-MeMBer
3.1.1. Box-Bernoulli Prediction
3.1.2. Box-Bernoulli Update
3.1.3. Object Trajectory Information Extraction
3.2. MB-OSNet
3.3. Object Association
3.4. Secondary Matching
4. Experiment
4.1. Datasets and Evaluation Indicators
4.1.1. Datasets
4.1.2. Evaluation Indicators
- (1)
- FP (↓): false positives in the entire video;
- (2)
- FN (↓): false negatives in the entire video;
- (3)
- IDSW (↓): ID switches in the entire video.
- (4)
- FM (↓): number of a ground-truth trajectory interrupted during the tracking process.
- (5)
- IDF1(↑): Ratio of correctly identified detection to the number of computed detections and ground truth.
- (6)
- MOTA (↑): combining false positives, false negatives, and IDSW, the score is then defined as follows:
- (7)
- MOTP (↑): the mismatch between the ground truth and the predicted results is calculated as follows:
4.2. Experimental Results
4.2.1. Object Detection
4.2.2. Multi-Object Tracking
4.2.3. Ablation Experiment
4.2.4. Self-Collected Dataset
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tan, L.; Huang, X.; Lv, X.; Jiang, X.; Liu, H. Strong interference UAV motion target tracking based on target consistency algorithm. Electronics 2023, 12, 1773. [Google Scholar] [CrossRef]
- Fan, H.; Du, D.; Wen, L. Visdrone-mot2020: The vision meets drone multiple object tracking challenge results. In Proceedings of the Computer Vision–ECCV 2020 Workshops, Glasgow, UK, 23–28 August 2020; Proceedings, Part IV 16. Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 713–727. [Google Scholar]
- Wu, X.; Li, W.; Hong, D.; Tao, R.; Du, Q. Deep learning for unmanned aerial vehicle-based object detection and tracking: A survey. IEEE Geosci. Remote Sens. Mag. 2021, 10, 91–124. [Google Scholar] [CrossRef]
- Lin, Y.; Wang, M.; Chen, W.; Gao, W.; Li, L.; Liu, Y. Multiple object tracking of drone videos by a temporal-association network with separated-tasks structure. Remote Sens. 2022, 14, 3862. [Google Scholar] [CrossRef]
- Zhu, P.; Wen, L.; Du, D.; Bian, X.; Fan, H.; Hu, Q.; Ling, H. Detection and tracking meet drones challenge. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 7380–7399. [Google Scholar] [CrossRef] [PubMed]
- Cheng, S.; Yao, M.; Xiao, X. DC-MOT: Motion deblurring and compensation for multi-object tracking in UAV videos. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 789–795. [Google Scholar]
- Xu, X.; Feng, Z.; Cao, C.; Yu, C.; Li, M.; Wu, Z.; Ye, S.; Shang, Y. STN-Track: Multiobject tracking of unmanned aerial vehicles by swin transformer neck and new data association method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 8734–8743. [Google Scholar] [CrossRef]
- Liang, Z.; Wang, J.; Xiao, G.; Zeng, L. FAANet: Feature-aligned attention network for real-time multiple object tracking in UAV videos. Chin. Opt. Lett. 2022, 20, 081101. [Google Scholar] [CrossRef]
- Ariza-Sentís, M.; Baja, H.; Vélez, S.; Valente, J. Object detection and tracking on UAV RGB videos for early extraction of grape phenotypic traits. Comput. Electron. Agric. 2023, 211, 108051. [Google Scholar] [CrossRef]
- García-Fernández, Á.F.; Xiao, J. Trajectory poisson multi-bernoulli mixture filter for traffic monitoring using a drone. IEEE Trans. Veh. Technol. 2023, 2023, 1–12. [Google Scholar] [CrossRef]
- Al-Shakarji, N.M.; Bunyak, F.; Seetharaman, G.; Palaniappan, K. Multi-object tracking cascade with multi-step data association and occlusion handling. In Proceedings of the 2018 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Auckland, New Zealand, 27–30 November 2018; pp. 1–6. [Google Scholar]
- Wang, J.; Simeonova, S.; Shahbazi, M. Orientation-and scale-invariant multi-vehicle detection and tracking from unmanned aerial videos. Remote Sens. 2019, 11, 2155. [Google Scholar] [CrossRef]
- Yu, H.; Li, G.; Zhang, W.; Yao, H.; Huang, Q. Self-balance motion and appearance model for multi-object tracking in UAV. In Proceedings of the 2019 ACM Multimedia Asia (MMAsia), Beijing, China, 15–18 December 2019; pp. 1–6. [Google Scholar]
- Dike, H.U.; Zhou, Y. A robust quadruplet and faster region-based CNN for UAV video-based multiple object tracking in crowded environment. Electronics 2021, 10, 795. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, G.; Lei, Z.; Hwang, J.N. Eye in the sky: Drone-based object tracking and 3d localization. In Proceedings of the 2019 27th ACM International Conference on Multimedia (MM), Nice, France, 21–25 October 2019; pp. 899–907. [Google Scholar]
- He, Y.; Fu, C.; Lin, F.; Li, Y.; Lu, P. Towards robust visual tracking for unmanned aerial vehicle with tri-attentional correlation filters. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 1575–1582. [Google Scholar]
- Stadler, D.; Sommer, L.W.; Beyerer, J. Pas tracker: Position-, appearance-and size-aware multi-object tracking in drone videos. In Proceedings of the 2020 European Conference on Computer Vision (ECCV), Glasgow, UK, 23–28 August 2020; pp. 604–620. [Google Scholar]
- Huang, W.; Zhou, X.; Dong, M.; Xu, H. Multiple objects tracking in the UAV system based on hierarchical deep high-resolution network. Multimed. Tools Appl. 2021, 80, 13911–13929. [Google Scholar] [CrossRef]
- Kapania, S.; Saini, D.; Goyal, S.; Thakur, N.; Jain, R.; Nagrath, P. Multi object tracking with UAVs using deep SORT and YOLO V3 RetinaNet detection framework. In Proceedings of the 2020 1st ACM Workshop on Autonomous and Intelligent Mobile Systems (AIMS), Bangalore, India, 11–22 January 2020; pp. 1–6. [Google Scholar]
- Emiyah, C.; Nyarko, K.; Chavis, C.; Bhuyan, I. Extracting vehicle track information from unstabilized drone aerial videos using YOLO v4 common object detector and computer vision. In Proceedings of the 2021 Future Technologies Conference (FTC), Vancouver, BC, Canada, 28–29 October 2021; pp. 232–239. [Google Scholar]
- Jadhav, A.; Mukherjee, P.; Kaushik, V.; Lall, B. Aerial multi-object tracking by detection using deep association networks. In Proceedings of the 2020 National Conference on Communications (NCC), Kharagpur, India, 21–23 February 2020; pp. 1–6. [Google Scholar]
- Avola, D.; Cinque, L.; Diko, A.; Fagioli, A.; Foresti, G.L.; Mecca, A.; Pannone, D.; Piciarelli, C. MS-Faster R-CNN: Multi-stream backbone for improved Faster R-CNN object detection and aerial tracking from UAV images. Remote Sens. 2021, 13, 1670. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, Y.; Zhang, D.; Huang, Z.; Wang, B. Research on vehicle tracking method based on UAV video. In Proceedings of the 2022 International Conference on Internet of Things and Smart City (IOTSC), Xiamen, China, 18–20 February 2022; pp. 801–806. [Google Scholar]
- Wu, H.; Du, C.; Ji, Z.; Gao, M.; He, Z. SORT-YM: An algorithm of multi-object tracking with YOLO V4-tiny and motion prediction. Electronics 2021, 10, 2319. [Google Scholar] [CrossRef]
- Forti, N.; Millefiori, L.M.; Braca, P.; Willett, P. Random finite set tracking for anomaly detection in the presence of clutter. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020. [Google Scholar]
- Jeong, H.M.; Lee, W.C.; Choi, H.L. Random finite set based safe landing zone detection and tracking. In Proceedings of the 2022 13th Asian Control Conference (ASCC), Jeju, Republic of Korea, 4–7 May 2022. [Google Scholar] [CrossRef]
- Chen, L.J. Multi-target tracking with dependent likelihood structures in labeled random finite set filters. In Proceedings of the 2021 IEEE 24th International Conference on Information Fusion (FUSION), Sun City, South Africa, 1–4 November 2021. [Google Scholar]
- LeGrand, K.; Zhu, P.; Ferrari, S. A random finite set sensor control approach for vision-based multi-object search-while-tracking. In Proceedings of the 2021 IEEE 24th International Conference on Information Fusion (FUSION), Sun City, South Africa, 1–4 November 2021. [Google Scholar] [CrossRef]
- Pang, S.; Morris, D.; Radha, H. 3D multi-object tracking using random finite set-based multiple measurement models filtering (rfs-m3) for autonomous vehicles. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 13701–13707. [Google Scholar]
- Zhu, P.; Wen, L.; Du, D. Vision meets drones: Past, present and future. arXiv 2020, arXiv:1804.07437. [Google Scholar] [CrossRef]
- Du, D.; Qi, Y.; Yu, H. The unmanned aerial vehicle benchmark: Object detection and tracking. In Proceedings of the 2018 European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 370–386. [Google Scholar]
- Ristani, E.; Solera, F.; Zou, R.; Cucchiara, R.; Tomasi, C. Performance measures and a data set for multi-target, multi-camera tracking. In Proceedings of the 2016 European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 8–16 October 2016; pp. 17–35. [Google Scholar]
- Bernardin, K.; Stiefelhagen, R. Evaluating multiple object tracking performance: The clear mot metrics. EURASIP J. Image Video Process. 2008, 2008, 246309. [Google Scholar] [CrossRef]
- Wojke, N.; Bewley, A.; Paulus, D. Simple online and realtime tracking with a deep association metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 3645–3649. [Google Scholar]
- Zhang, Y.; Sun, P.; Jiang, Y.; Yu, D.; Weng, F.; Luo, P.; Liu, W.; Wang, X. Bytetrack: Multi-object tracking by associating every detection box. In Proceedings of the European Conference on Computer Vision (ECCV), Tel Aviv, Israel, 23–27 October 2022; pp. 1–21. [Google Scholar]
- Aharon, N.; Orfaig, R.; Bobrovsky, B.Z. BoT-SORT: Robust associations multi-pedestrian tracking. arXiv 2022, arXiv:2206.14651. [Google Scholar] [CrossRef]
- Liu, S.; Li, X.; Lu, H.; He, W. Multi-object tracking meets moving UAV. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2020; pp. 8876–8885. [Google Scholar]
- Maggiolino, G.; Ahmad, A.; Cao, J.; Kitani, K. Deep OC-SORT: Multi-pedestrian tracking by adaptive re-identification. arXiv 2023, arXiv:2302.11813. [Google Scholar] [CrossRef]
- Du, Y.; Zhao, Z.; Song, Y.; Zhao, Y.Y.; Su, F.; Gong, T.; Meng, H. Strong SORT: Make DeepSORT great again. IEEE Trans. Multimed. 2023, 2023, 1–14. [Google Scholar] [CrossRef]
- Li, J.; Ding, Y.; Wei, H.L. Simple Track: Rethinking and improving the JDE approach for multi-object tracking. Sensors 2022, 22, 5863. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tracker | MOTA | MOTP | IDF1 | IDSW | MT% | ML | FP | FN |
|---|---|---|---|---|---|---|---|---|
| DeepSORT | 19.4 | 69.8 | 33.1 | 6387 | 127 | 592 | 18,635 | 73,853 |
| ByteTrack | 25.1 | 72.6 | 40.8 | 4590 | 189 | 503 | 14,154 | 64,329 |
| Deep OC-SORT | 21.0 | 69.5 | 37.8 | 6489 | 133 | 663 | 17,599 | 50,485 |
| BoT-SORT | 23.0 | 71.6 | 41.4 | 7014 | 257 | 736 | 13,952 | 69,402 |
| UAVMOT | 25.0 | 72.3 | 40.5 | 6644 | 244 | 496 | 12,804 | 80,476 |
| Strong SORT | 34.8 | 74.3 | 42.6 | 3091 | 201 | 364 | 11,257 | 54,723 |
| SimpleTrack | 33.9 | 75.1 | 53.6 | 2238 | 317 | 208 | 10,528 | 47,239 |
| DB-Tracker | 37.4 | 75.9 | 54.8 | 2043 | 311 | 247 | 12,903 | 73,425 |
| Tracker | MOTA | MOTP | IDF1 | IDSW | MT% | ML% | FP | FN |
|---|---|---|---|---|---|---|---|---|
| DeepSORT | 35.9 | 71.5 | 58.3 | 698 | 43.4 | 25.7 | 69,091 | 144,760 |
| ByteTrack | 39.1 | 74.3 | 44.7 | 2341 | 43.8 | 28.1 | 33,129 | 173,228 |
| Deep OC-SORT | 36.4 | 73.7 | 48.3 | 1993 | 35.9 | 30.6 | 44,612 | 180,921 |
| BoT-SORT | 37.2 | 72.1 | 53.1 | 1692 | 40.8 | 27.3 | 52,451 | 146,420 |
| UAVMOT | 43.0 | 73.5 | 61.5 | 641 | 45.3 | 22.7 | 46,151 | 147,735 |
| Strong SORT | 44.2 | 76.4 | 54.3 | 2024 | 38.3 | 24.8 | 53,423 | 139,875 |
| SimpleTrack | 45.3 | 77.9 | 57.1 | 1404 | 43.6 | 22.5 | 39,452 | 138,457 |
| DB-Tracker | 46.2 | 78.3 | 58.2 | 1436 | 45.9 | 22.1 | 34,531 | 143,625 |
| Components | ||||
|---|---|---|---|---|
| Baseline | √ | √ | √ | √ |
| Box-MeMBer | √ | √ | √ | |
| MB-OSNet | √ | √ | ||
| secondary matching | √ | |||
| MOTA | 14.8 | 28.9 | 33.9 | 37.4 |
| MOTP | 47.3 | 64.2 | 72.6 | 75.9 |
| IDSW | 6819 | 3584 | 2563 | 2043 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Y.; Wu, Y.; Zhao, L.; Chen, J.; Zhao, Q. DB-Tracker: Multi-Object Tracking for Drone Aerial Video Based on Box-MeMBer and MB-OSNet. Drones 2023, 7, 607. https://doi.org/10.3390/drones7100607
Yuan Y, Wu Y, Zhao L, Chen J, Zhao Q. DB-Tracker: Multi-Object Tracking for Drone Aerial Video Based on Box-MeMBer and MB-OSNet. Drones. 2023; 7(10):607. https://doi.org/10.3390/drones7100607
Chicago/Turabian StyleYuan, Yubin, Yiquan Wu, Langyue Zhao, Jinlin Chen, and Qichang Zhao. 2023. "DB-Tracker: Multi-Object Tracking for Drone Aerial Video Based on Box-MeMBer and MB-OSNet" Drones 7, no. 10: 607. https://doi.org/10.3390/drones7100607