0% found this document useful (0 votes)
26 viewsModule 02C Difference Equation
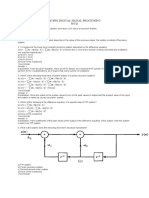
This document discusses discrete linear systems and difference equations. It introduces how a discrete linear system can be represented by a difference equation relating the output to current and past inputs. It also discusses stability of systems and how impulse responses can characterize finite impulse response (FIR) and infinite impulse response (IIR) systems. Convolution is presented as a way to calculate the output of FIR and IIR systems from the input and impulse response. Feedback is introduced as a way to implement systems like a running average using difference equations instead of direct convolution.
Uploaded by
Ty SmithCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
26 viewsModule 02C Difference Equation
This document discusses discrete linear systems and difference equations. It introduces how a discrete linear system can be represented by a difference equation relating the output to current and past inputs. It also discusses stability of systems and how impulse responses can characterize finite impulse response (FIR) and infinite impulse response (IIR) systems. Convolution is presented as a way to calculate the output of FIR and IIR systems from the input and impulse response. Feedback is introduced as a way to implement systems like a running average using difference equations instead of direct convolution.
Uploaded by
Ty SmithCopyright
© © All Rights Reserved
Available Formats
Download as PDF, TXT or read online on Scribd
/ 7