0% found this document useful (0 votes)
1K viewsParallel Computing Terminology
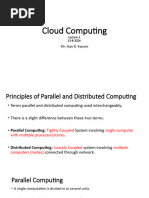
Parallel computing involves using multiple processors simultaneously to solve computational problems. It breaks problems into discrete parts that can be solved concurrently. Traditionally, software runs serially on a single CPU, with instructions executed one by one. Parallel computing allows instructions from different parts of a problem to execute simultaneously on different CPUs. This can reduce the time needed to solve problems and allow larger problems to be solved.
Uploaded by
maxsen021Copyright
© Attribution Non-Commercial (BY-NC)
Available Formats
Download as DOC, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
1K viewsParallel Computing Terminology
Parallel computing involves using multiple processors simultaneously to solve computational problems. It breaks problems into discrete parts that can be solved concurrently. Traditionally, software runs serially on a single CPU, with instructions executed one by one. Parallel computing allows instructions from different parts of a problem to execute simultaneously on different CPUs. This can reduce the time needed to solve problems and allow larger problems to be solved.
Uploaded by
maxsen021Copyright
© Attribution Non-Commercial (BY-NC)
Available Formats
Download as DOC, PDF, TXT or read online on Scribd
/ 11