New Approaches To Switched-Mode Audio Power Amplifiers
New Approaches To Switched-Mode Audio Power Amplifiers
Download as docx, pdf, or txt
You might also like
- Horn Speaker Systems - Table of Contents PDFDocument17 pagesHorn Speaker Systems - Table of Contents PDFRoland HendriksNo ratings yet
- Horn Speaker Systems - Table of Contents PDFDocument17 pagesHorn Speaker Systems - Table of Contents PDFRoland HendriksNo ratings yet
- Applied MechatronicsDocument17 pagesApplied MechatronicsWilliam Hamonangan SiahaanNo ratings yet
- Class D Audio Amplifier With Ferroxcube Gapped Toroid Output FilterDocument0 pagesClass D Audio Amplifier With Ferroxcube Gapped Toroid Output Filterikaro181083100% (1)
- FinalDocument16 pagesFinalKrishna DhootNo ratings yet
- An 1198Document12 pagesAn 1198Orozco LoraineNo ratings yet
- Class-D Power AmplifierDocument30 pagesClass-D Power AmplifierSidney O. EbotNo ratings yet
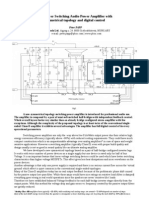
- High Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlDocument3 pagesHigh Power Switching Audio Power Amplifier With Symmetrical Topology and Digital ControlPéter PAPPNo ratings yet
- Class D Amplifiers Guide Maxim IntegratedDocument11 pagesClass D Amplifiers Guide Maxim Integrated巩子辉No ratings yet
- Class D Amplifier Fa QDocument12 pagesClass D Amplifier Fa Qychig1232669No ratings yet
- RF Power Amplifiers: 5.1 SpecificationDocument40 pagesRF Power Amplifiers: 5.1 SpecificationAtc CarvalhoNo ratings yet
- Class D Audio AmplifiersDocument56 pagesClass D Audio AmplifiersreadthenewsNo ratings yet
- Class C AmplifierDocument14 pagesClass C AmplifierSuresh Kumar SubbiahNo ratings yet
- Project Report: ON Stereo Brick AmplifierDocument43 pagesProject Report: ON Stereo Brick AmplifierShoaib KhanNo ratings yet
- Audio Power Amplifier ProjectDocument49 pagesAudio Power Amplifier ProjectMohd Razali BaharonNo ratings yet
- Op-Amp Filter - The Active Low Pass FilterDocument6 pagesOp-Amp Filter - The Active Low Pass FilterBaljinder KaurNo ratings yet
- Audio AmplifiersDocument11 pagesAudio AmplifiersWaqas AbroNo ratings yet
- Class D Audio AmplifierDocument11 pagesClass D Audio AmplifierHenry Pal100% (2)
- 40m AM TX ArticleDocument6 pages40m AM TX ArticleElectrónica HeizerNo ratings yet
- The A40 Power AmplifierDocument9 pagesThe A40 Power AmplifierHenry Jose Larez RojasNo ratings yet
- Class D Amplifier2Document15 pagesClass D Amplifier2anisettimanikantaNo ratings yet
- A Class-A Amplifier For Home Constructors: PART ONE - Design Considerations and A Circuit DescriptionDocument7 pagesA Class-A Amplifier For Home Constructors: PART ONE - Design Considerations and A Circuit DescriptionisaijhabinNo ratings yet
- Concept: +V RF RL CL LDocument10 pagesConcept: +V RF RL CL LT MorgantiNo ratings yet
- CrossOver Series Vs ParallelDocument12 pagesCrossOver Series Vs ParallelTjunKiatNo ratings yet
- Class D AmplifierDocument15 pagesClass D AmplifierPramudya Ksatria BudimanNo ratings yet
- Damping FactorDocument2 pagesDamping FactorAngel Morales MartínezNo ratings yet
- ClassDAmps ReviewBook LRDocument58 pagesClassDAmps ReviewBook LRAlejandroVCMXNo ratings yet
- Elliott Sound Products - Linear Power Supply DesignDocument26 pagesElliott Sound Products - Linear Power Supply Designksb9790No ratings yet
- RF Power Amplifiers and ProjectsDocument76 pagesRF Power Amplifiers and ProjectsDiego García MedinaNo ratings yet
- Mos 100Document16 pagesMos 100lagmanr30No ratings yet
- Build A Class-A AmplifierDocument9 pagesBuild A Class-A AmplifierFe DnyNo ratings yet
- Multi-Stage AmplifiersDocument11 pagesMulti-Stage Amplifiershaitham78hNo ratings yet
- Chopper Amplifier ThesisDocument8 pagesChopper Amplifier Thesisyessicadiaznorthlasvegas100% (2)
- SMPS For AudioDocument16 pagesSMPS For AudioTudor Gabriel GavrilescuNo ratings yet
- Limiter UM enDocument5 pagesLimiter UM enDrixNo ratings yet
- Adjusting The Bias of Your AmpDocument4 pagesAdjusting The Bias of Your AmpJedi_Obi_WanNo ratings yet
- Filter-Free Design Helps Class-D Audio Amplifier ImplementationsDocument6 pagesFilter-Free Design Helps Class-D Audio Amplifier ImplementationsDirson Volmir WilligNo ratings yet
- Class D Tutorial 2Document17 pagesClass D Tutorial 2អំភ្លី សំលេង100% (1)
- Amplificator Clasa DDocument4 pagesAmplificator Clasa DelmannNo ratings yet
- Compact Hi-Fi Power AmplifierDocument2 pagesCompact Hi-Fi Power Amplifiernaval_architectNo ratings yet
- Second Stage Filter DesignDocument6 pagesSecond Stage Filter DesignNnamdiNo ratings yet
- Class D AmplifierDocument5 pagesClass D AmplifierkothuraNo ratings yet
- Class D Amplifiers - Interactive SimulationsDocument5 pagesClass D Amplifiers - Interactive SimulationsCristi BondNo ratings yet
- Pass X250 Owner's ManualDocument14 pagesPass X250 Owner's ManualJohnNo ratings yet
- Class D Audio Amplifier Basics PDFDocument14 pagesClass D Audio Amplifier Basics PDFJulian De MarcosNo ratings yet
- HP Deck Bass PreampDocument8 pagesHP Deck Bass PreampOwen MorganNo ratings yet
- CAT5E/6 Impedance/Return LossDocument8 pagesCAT5E/6 Impedance/Return Lossb4digitalNo ratings yet
- AN1646Document7 pagesAN1646Duc HuynhNo ratings yet
- 100 and 200 Watt High Fidelity Audio Amplifiers Utilizing A Widebandćlow Feedback Design An1308Document24 pages100 and 200 Watt High Fidelity Audio Amplifiers Utilizing A Widebandćlow Feedback Design An1308alvarodellanaveNo ratings yet
- Motorola High Fidelity Amplifer 200WDocument24 pagesMotorola High Fidelity Amplifer 200Wregelemar100% (2)
- Op Amp ThesisDocument7 pagesOp Amp Thesisemilyjoneswashington100% (2)
- Which Amplifier Is Used To Provide Increased BandwidthDocument10 pagesWhich Amplifier Is Used To Provide Increased BandwidthjackNo ratings yet
- Designing An Audio AmplifierDocument35 pagesDesigning An Audio AmplifierCh Cheah100% (2)
- A Guide to Vintage Audio Equipment for the Hobbyist and AudiophileFrom EverandA Guide to Vintage Audio Equipment for the Hobbyist and AudiophileNo ratings yet
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringFrom EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringNo ratings yet
- Measurement of Complex Acoustic Intensity in An Acoustic WaveguideDocument13 pagesMeasurement of Complex Acoustic Intensity in An Acoustic WaveguideRoland HendriksNo ratings yet
- Philips DFR 9000 Service Manual PDFDocument78 pagesPhilips DFR 9000 Service Manual PDFRoland HendriksNo ratings yet
- Philips dfr9000 SMDocument78 pagesPhilips dfr9000 SMRoland HendriksNo ratings yet
- JBL tn-OACDDocument4 pagesJBL tn-OACDRoland HendriksNo ratings yet
- Premium Line Product Catalog SmallDocument18 pagesPremium Line Product Catalog SmallRoland HendriksNo ratings yet
- P2.1 The Efficacy of Subsidence Warming in The Core of Numerically Simulated Tornado-Like VorticesDocument5 pagesP2.1 The Efficacy of Subsidence Warming in The Core of Numerically Simulated Tornado-Like VorticesRoland HendriksNo ratings yet
- Speaker CrossoverDocument74 pagesSpeaker CrossoverVys Pratap100% (1)
- Speaker Crossover LabDocument51 pagesSpeaker Crossover LabRoland HendriksNo ratings yet
- Fall 2010 Group 8 Marketing MyopiaDocument18 pagesFall 2010 Group 8 Marketing MyopiaHaridas KarathNo ratings yet
- The Kabbalah UnveiledDocument278 pagesThe Kabbalah Unveiledfulgence1No ratings yet
- احمد تركي كحيوش 2Document30 pagesاحمد تركي كحيوش 2أحمد تركي كحيوشNo ratings yet
- Access Standard Assessment Guide 20190131Document36 pagesAccess Standard Assessment Guide 20190131sykimk8921No ratings yet
- Huawei Bts 3900 TrainingDocument47 pagesHuawei Bts 3900 Trainingmr_hemel238660% (5)
- Full Report For Experiment With High Low and Band Pass FiltersDocument11 pagesFull Report For Experiment With High Low and Band Pass FiltersGabra23No ratings yet
- Lab ExperimentDocument20 pagesLab ExperimentPrakash JhaNo ratings yet
- A Combined Model For A Bucket Brigade Device and Its Input and Output FiltersDocument8 pagesA Combined Model For A Bucket Brigade Device and Its Input and Output FilterschriscluckNo ratings yet
- A Designers Guide To Instrumentation Amplifiers 3rd EdDocument130 pagesA Designers Guide To Instrumentation Amplifiers 3rd EdCL ManinhoNo ratings yet
- TjeyaDocument5 pagesTjeyaKingsleyNo ratings yet
- Design and Research On Parameter of LCL Filter in Three-Phase Grid-Connected InverterDocument4 pagesDesign and Research On Parameter of LCL Filter in Three-Phase Grid-Connected InverterDucSyHoNo ratings yet
- Design of Low Pass Filter Using Sun-Shaped ResonatorDocument9 pagesDesign of Low Pass Filter Using Sun-Shaped ResonatorkhyatichavdaNo ratings yet
- Ansoft Interdigital CapacitorDocument18 pagesAnsoft Interdigital CapacitorIPC20XXNo ratings yet
- Zero Power Harmonic Filters: EquipmentDocument3 pagesZero Power Harmonic Filters: EquipmentbansalrNo ratings yet
- Technical Seminar Report-1 SuryaDocument18 pagesTechnical Seminar Report-1 SuryaSurya NarayanaNo ratings yet
- A Simple Handheld Electrocardiogram DesignDocument10 pagesA Simple Handheld Electrocardiogram DesignMohammed MubarakNo ratings yet
- CapacitorsDocument74 pagesCapacitorsLuis Navegante RuizNo ratings yet
- 3500/42M Proximitor /seismic Monitor: Bently Nevada Asset Condition MonitoringDocument18 pages3500/42M Proximitor /seismic Monitor: Bently Nevada Asset Condition MonitoringSPIC UreaNo ratings yet
- Band-Stop Filters: Filter, Passes All Frequencies With The Exception of Those Within ADocument3 pagesBand-Stop Filters: Filter, Passes All Frequencies With The Exception of Those Within AKrishna AgarwalNo ratings yet
- Draft Sight Getting Started GuideDocument70 pagesDraft Sight Getting Started Guidesteviej85No ratings yet
- (Vol - Ii) Microwave Filters, Impedance-Matching Networks, and Coupling StructuresDocument572 pages(Vol - Ii) Microwave Filters, Impedance-Matching Networks, and Coupling Structuressuchit91No ratings yet
- Transistor Active High Pass Filter Electronics NotesDocument2 pagesTransistor Active High Pass Filter Electronics NotesRenato DeákNo ratings yet
- Effective EMI Filter Design Method of Singlephase Inverter Based On Noise Source ImpedanceDocument6 pagesEffective EMI Filter Design Method of Singlephase Inverter Based On Noise Source ImpedanceToánNo ratings yet
- Lic Ti-135-136Document2 pagesLic Ti-135-136Barath KumarNo ratings yet
- Design Techniques of Microwave Cavity and Waveguide Filters: A Literature ReviewDocument7 pagesDesign Techniques of Microwave Cavity and Waveguide Filters: A Literature ReviewTanko SuleNo ratings yet
- Amphitec BranchementDocument20 pagesAmphitec BranchementCristal Cristal75% (4)
- Iraudamp9 - 1x1700w PDFDocument39 pagesIraudamp9 - 1x1700w PDFHarun ARIKNo ratings yet
- Audio Damage, Inc. Release 2.0: Dubstation User's GuideDocument12 pagesAudio Damage, Inc. Release 2.0: Dubstation User's GuideMichele G RusminiNo ratings yet
- Comparator and Schemitt TriggerDocument43 pagesComparator and Schemitt TriggergandharvaNo ratings yet
- A Dictionary of Electronics and Electrical Engineering 2018Document1,087 pagesA Dictionary of Electronics and Electrical Engineering 2018Prince Danda100% (1)
- Plasticityfilter Installation and Usage ManualDocument7 pagesPlasticityfilter Installation and Usage ManualDani DuneNo ratings yet