Small Spacecraft Technology State of The Art 2014
Small Spacecraft Technology State of The Art 2014
Uploaded by
betamaksCopyright:
Available Formats
Small Spacecraft Technology State of The Art 2014
Small Spacecraft Technology State of The Art 2014
Uploaded by
betamaksOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Copyright:
Available Formats
Small Spacecraft Technology State of The Art 2014
Small Spacecraft Technology State of The Art 2014
Uploaded by
betamaksCopyright:
Available Formats
NASA/TP2014216648
Small Spacecraft Technology
State of the Art
Mission Design Division Staff
Ames Research Center, Moffett Field, California
February 2014
NASA STI Program . . . in Prole
Since its founding, NASA has been
dedicated to the advancement of
aeronautics and space science. The
NASA scientic and technical
information (STI) program plays a key
part in helping NASA maintain this
important role.
The NASA STI Program operates
under the auspices of the Agency
Chief Information Ofcer. It collects,
organizes, provides for archiving, and
disseminates NASAs STI. The NASA
STI Program provides access to the
NASA Aeronautics and Space
Database and its public interface, the
NASA Technical Report Server, thus
providing one of the largest collection
of aeronautical and space science STI
in the world. Results are published in
both non-NASA channels and by
NASA in the NASA STI Report Series,
which includes the following report
types:
TECHNICAL PUBLICATION.
Reports of completed research or a
major signicant phase of research
that present the results of NASA
programs and include extensive data
or theoretical analysis. Includes
compilations of signicant scientic
and technical data and information
deemed to be of continuing
reference value. NASA counterpart
of peer-reviewed formal professional
papers, but having less stringent
limitations on manuscript length and
extent of graphic presentations.
TECHNICAL MEMORANDUM.
Scientic and technical ndings that
are preliminary or of specialized
interest, e.g., quick release reports,
working papers, and bibliographies
that contain minimal annotation.
Does not contain extensive analysis.
CONTRACTOR REPORT. Scientic
and technical ndings by
NASA-sponsored contractors and
grantees.
CONFERENCE PUBLICATION.
Collected papers from scientic and
technical conferences, symposia,
seminars, or other meetings
sponsored or co-sponsored by
NASA.
SPECIAL PUBLICATION. Scientic,
technical, or historical information
from NASA programs, projects, and
missions, often concerned with
subjects having substantial public
interest.
TECHNICAL TRANSLATION.
English- language translations of
foreign scientic and technical
material pertinent to NASAs
mission.
Specialized services also include
creating custom thesauri, building
customized databases, and organizing
and publishing research results.
For more information about the NASA
STI Program, see the following:
Access the NASA STI program
home page at
http://www.sti.nasa.gov
E-mail your question via the Internet
to help@sti.nasa.gov
Fax your question to the NASA STI
Help Desk at 443-757-5803
Phone the NASA STI Help Desk at
443-757-5802
Write to:
NASA STI Help Desk
NASA Center for AeroSpace
Information
7115 Standard Drive
Hanover, MD 210761320
NASA/TP2014216648
Small Spacecraft Technology
State of the Art
Mission Design Division Staff
Ames Research Center, Moffett Field, California
National Aeronautics and
Space Administration
Ames Research Center
Moffett Field, California 94035
February 2014
Acknowledgments
This report has been based largely on desk research and published documents on
small spacecraft technology. Helpful suggestions and comments were also received
from numerous people at NASA Ames Research Center, and in particular the authors
wish to acknowledge the contributions from Aaron Cohen, Cyrus Foster, Brian Lewis,
David Mauro, Matthew Nehrenz, Matthew Sorgenfrei, and Michael Soulage.
The use of trademarks or names of manufacturers in this report is for accurate reporting and
does not constitute an ofcial endorsement, either expressed or implied, of such products or
manufacturers by the National Aeronautics and Space Administration.
Available from:
NASA Center for AeroSpace Information
7115 Standard Drive
Hanover, MD 21076-1320
443-757-5802
National Technical Information Service
5301 Shawnee Road
Alexandria, VA 22312
703-605-6000
This report is also available in electronic form at
http://www.nasa.gov/sites/default/les/les/Small_Spacecraft_Technology_State_of_the_Art_2014.pdf
Abstract
This report provides an overview of the current state of the art of small
spacecraft technology. It was commissioned by NASAs Small Space-
craft Technology Program (SSTP) in mid-2013 in response to the rapid
growth in interest in using small spacecraft for many types of missions
in Earth orbit and beyond. For the sake of this assessment, small
spacecraft are dened to be spacecraft with a mass less than 180 kg.
This report provides a summary of the state of the art for each of the
following small spacecraft technology domains: Complete spacecraft,
Power, Propulsion, Attitude Determination and Control, Structures, Ma-
terials and Mechanisms, Thermal Control, Command and Data Han-
dling, Communications, Integration, Launch and Deployment, and Ground
Data Systems and Operations. Due to the high popularity of cubesats,
particular emphasis is placed on the state-of-the-art of cubesat-related
technology.
1
REPORT DOCUMENTATION PAGE
Form Approved
OMB No. 07040188
The public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources,
gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection
of information, including suggestions for reducing this burden, to Department of Defense, Washington Headquarters Services, Directorate for Information Operations and Reports
(0704-0188), 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302. Respondents should be aware that notwithstanding any other provision of law, no person shall be
subject to any penalty for failing to comply with a collection of information if it does not display a currently valid OMB control number.
PLEASE DO NOT RETURN YOUR FORM TO THE ABOVE ADDRESS.
1. REPORT DATE (DD-MM-YYYY)
01-02-2014
2. REPORT TYPE
Technical Publication
3. DATES COVERED (From - To)
4. TITLE AND SUBTITLE
Small Spacecraft Technology
State of the Art
5a. CONTRACT NUMBER
5b. GRANT NUMBER
5c. PROGRAM ELEMENT NUMBER
6. AUTHOR(S)
Mission Design Division Staff
5d. PROJECT NUMBER
5e. TASK NUMBER
5f. WORK UNIT NUMBER
7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES)
NASA Ames Research Center
Moffett Field, California 94035
8. PERFORMING ORGANIZATION
REPORT NUMBER
A
9. SPONSORING/MONITORING AGENCY NAME(S) AND ADDRESS(ES)
National Aeronautics and Space Administration
Washington, DC 20546-0001
10. SPONSOR/MONITORS ACRONYM(S)
NASA
11. SPONSOR/MONITORS REPORT
NUMBER(S)
NASA/TP2014216648
12. DISTRIBUTION/AVAILABILITY STATEMENT
Unclassied-Unlimited
Subject Category
Availability: NASA CASI (443) 757-5802
13. SUPPLEMENTARY NOTES
An electronic version can be found at http://ntrs.nasa.gov.
14. ABSTRACT
This report provides an overview of the current state of the art of small spacecraft technology. It was commissioned by NASAs
Small Spacecraft Technology Program (SSTP) in mid-2013 in response to the rapid growth in interest in using small spacecraft
for many types of missions in Earth orbit and beyond. For the sake of this assessment, small spacecraft are dened to be
spacecraft with a mass less than 180 kg. This report provides a summary of the state of the art for each of the following small
spacecraft technology domains: Complete spacecraft, Power, Propulsion, Attitude Determination and Control, Structures,
Materials and Mechanisms, Thermal Control, Command and Data Handling, Communications, Integration, Launch and
Deployment, and Ground Data Systems and Operations. Due to the high popularity of cubesats, particular emphasis is placed
on the state-of-the-art of cubesat-related technology.
15. SUBJECT TERMS
spacecraft, technology, nanosat, smallsat
16. SECURITY CLASSIFICATION OF: 17. LIMITATION OF
ABSTRACT
UU
18. NUMBER
OF
PAGES
19a. NAME OF RESPONSIBLE PERSON
STI Help Desk (email: help@sti.nasa.gov) a. REPORT
U
b. ABSTRACT
U
c. THIS PAGE
U
19b. TELEPHONE NUMBER (Include area code)
(443) 757-5802
Standard Form 298 (Rev. 8/98)
Prescribed by ANSI Std. Z39.18
.
.
Disclaimer
The document lists or describes many specific products and technologies as examples
and references but their inclusion does not imply any endorsement by NASA. Failure to
include any specific products or technologies that might be considered relevant under
a particular topic was unintentional.
NASA Ames Research Center, Mission Design Division
February, 2014
Division Chief: Chad Frost
Project Manager: Elwood Agasid
Contributing Authors:
David Biggs, John Conley, Andres Dono Perez, Nicolas Faber, Anthony Genova, Andrew
Gonzales, Alessandro Grasso, James Harpur, Steven Hu, Luke Idziak, Sarah Jolitz, Jonas
Jonsson, John Love, Yosuke Nakamura, Andrew Nuttall, Robin Reil, Vibha Srivastava,
Travis Swenson, and Sasha Weston
Table of Contents
!"!#$%&'! )$**+,- ......................................................................................................................................... /
&. &0%,12$#%&10 ............................................................................................................................................. 3
&&. )4+#!#,+5% .............................................................................................................................................. 6/
&&&. 417!, ..................................................................................................................................................... 68
&'. 4,14$9)&10 ............................................................................................................................................. /3
'. +%%&%$2! 2!%!,*&0+%&10 +02 #10%,19 )-)%!* .................................................................................. :;
'&. )%,$#%$,!)< *+%!,&+9) = *!#>+0&)*) ............................................................................................... 8:
'&&. %>!,*+9 #10%,19 )-)%!* ................................................................................................................... ?3
'&&&. #1**+02 +02 2+%+ >+029&0@ ......................................................................................................... A8
&". #1**$0&#+%&10) ................................................................................................................................ 66B
". &0%!@,+%&10< 9+$0#> +02 2!491-*!0% ............................................................................................. 6/A
"&. @,1$02 )-)%!*) +02 14!,+%&10) ..................................................................................................... 68/
"&&. #10#9$)&10 ......................................................................................................................................... 6?:
+44!02&"C %+D9!) +02 +22&%&10+9 2+%+ ..................................................................................................... 6?B
+44!02&"C 9&)% 15 +#,10-*) ........................................................................................................................ 6AB
<1 kg 180 kg - 100 kg
Femto and
picosatellite
Nanosatellite
(CubeSat)
Microsatellite Minisatellite
100 kg - 10 kg 10 kg - 1 kg
EXECUTIVE SUMMARY
This report was commissioned by NASA's Small Spacecraft Technology Program (SSTP)
in mid-2013 in response to the rapid growth in interest in using small spacecraft for
many types of missions in Earth orbit and beyond. This report summarizes the current
state of the art (SoA) in small spacecraft technology for each of the following
technology domains: complete spacecraft, power, propulsion, attitude determination
and control, structures, materials and mechanisms, thermal control, command and
data handling, communications, integration, launch and deployment, and ground data
systems and operations. Due to the high popularity of CubeSats, particular emphasis is
placed on CubeSat-related technology.
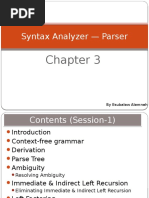
Figure 1A: Small spacecraft classifications.
This report will be regularly updated as emerging technologies mature and become the
state of the art (SoA). Any current technologies that were inadvertently missed will be
identified and included in subsequent versions. The authors are soliciting reader input
in the comprehensive assessment of small spacecraft technology; please email arc-
smallsats@mail.nasa.gov and include state of the art report in the subject line.
Spacecraft
State of the Art: In recent years small spacecraft have become more attractive due to
lower development costs and shorter lead times. There is a natural trade-off to be
made between spacecraft size and functionality, but advances in both miniaturization
and integration technologies have diminished the scope of that trade-off. An example
of the SoA in miniaturization technology is micro-electromechanical systems (MEMS),
i.e. components with microscale ("m) features. In addition to their small size, in some
cases MEMS-based devices can provide higher accuracy and lower power consumption
2
compared to conventional spacecraft systems. Some small spacecraft are assembled
and integrated with the same rigor as their larger counterparts, while others are
integrated within a university laboratory. Effectively integrating individual components
can substantially increase the systems functionality and density, thereby reducing
unnecessary mass and volume. As such the SoA in small spacecraft integration
techniques is as advanced, if not more, than those used for larger spacecraft. It is also
worth mentioning that commercial off the shelf (COTS) components and consumer
electronics are commonly used to build small spacecraft at the lower end of the cost
range.
On the Horizon: There is a trend towards further miniaturization and higher levels of
integration (such as observed in pico- and femtosats). Fractionated mission
architectures are also a promising field of investigation.
Power
State of the Art: Small spacecraft are currently using advanced power generation and
energy storage technology, with 29% efficient triple-junction, lightweight solar cells
(weighing about 85 mg/cm
2
) and high specific energy lithium ion batteries (averaging
200 Whr/kg). The early adoption of flat lithium polymer battery packs is unique within
the space industry because of the higher risk tolerance of mission designers and more
stringent mass and volume requirements. Power distribution systems are reliable and
robust, even to single event upsets. All spacecraft systems can benefit from technology
advances and component miniaturization in the consumer electronics market.
On the Horizon: There are flexible solar cells under development allowing new
concepts for solar panel deployment. Another technology on the horizon is the
CubeSat-scale Radioisotope Thermal Generator (RTG).
Propulsion
State of the Art: Small spacecraft propulsion is a rapidly growing, albeit immature
technology domain. The SoA in this field consists of cold gas thrusters (specific
impulse [Isp] of 70 sec), solid rocket motors (Isp of 270 sec), and pulsed plasma
3
thrusters (Isp of 830 sec). Green monopropellant systems (Isp of 300 sec) will soon be
demonstrated.
On the Horizon: Both chemical and electric propulsion options are on track to mature
within the next five years. Hydrolytic systems using water are also under development,
along with integrated primary thrusters and reaction control systems.
Attitude Determination & Control Systems
State of the Art: The SoA of Attitude Determination & Control (ADCS) for small
spacecraft relies on miniaturizing technology without significant performance
degradation. Miniaturizations are achieved with advanced technologies such as new
imaging devices, materials, peripheral circuits, and algorithms. Overall attitude
pointing accuracy of typical mini- and microsatellite Earth observation missions is on
the order of 0.1#. Higher accuracy below 0.1# can be achieved using a mission related
sensor (i.e., a payload instrument) in the attitude control loop. Pointing accuracy of
nano and picosatellites (including CubeSats) is an order of magnitude larger and
around 2#, but has improved rapidly thanks to miniaturized ADCS components. The
limiting factor for CubeSat pointing is attitude control; current control accuracy is
around 1.8#. Systematically decreasing the development cost of ADCS software will
contribute to the low cost and rapid development benefits of using small spacecraft.
On the Horizon: Pointing accuracy for CubeSats may go below 1# due to miniaturized
star trackers.
Technology Gaps: There is a need for ADCS thruster technology for spacecraft below
100 kg, especially if interplanetary missions are planned with this type of spacecraft.
Structures, Materials & Mechanisms
State of the Art: Commercial companies fabricate structures for a large variety of
small satellite missions. Pumpkin, ISIS and SSTL lead the market. Most structures built
in-house pertain to mini- or microsatellites. However in-house built structures are
becoming rarer and today nanosat developers tend to buy their structures off-the-
4
shelf. CubeSat structures follow determined guidelines regarding their size and
materials.
Due to their reliability and strength, aluminum alloys (with an average density of 2.8
g/cm
3
) are the material most used for small satellite structures. Composites have been
used more frequently in the last few years, but their high cost is still a disadvantage.
Mechanisms and actuators for small spacecraft have proven their reliability in space.
Commercial companies such as SSTL or Honeybee Robotics offer deployment and
antenna pointing mechanisms with a high Technology Readiness Level (TRL). A large
number of missions develop their own mechanical designs.
On the Horizon: 3D-printed structures (additive manufacturing) is one mass
production technique currently under investigation for small spacecraft platforms.
Thermal Control Systems
State of the Art: Passive thermal control systems for small spacecraft use thermal
insulation such as multi-layer insulation (MLI) and beta cloth, or thermal coating with
white and black polyurethane paint and tape. Thermal transfer is guaranteed through
heat pipes (flat plate heat pipes, or loop heat pipes), bolts, washers, fillers, and spacers.
Passive thermal control is inexpensive and low risk, and has been shown to be reliable
and basic. Active thermal control systems have more demanding design requirements
(in terms of mass and power) making these techniques more difficult to use on small
spacecraft. Engineers are able to equip temperature sensitive devices such as batteries
and cameras with electric heaters and coolers to maintain operational temperatures.
Until it is possible to miniaturize current active thermal methods, small satellites will
not be able to use that technology efficiently.
On the Horizon: There is a trend to miniaturize active thermal control systems of
larger spacecraft so they can be applied to small spacecraft using MEMS or other nano-
devices.
Technology Gaps: Nanosats are approaching a scale (6U) at which more power can be
generated than can be passively dissipated with current technology. Active systems at
CubeSat scale or novel passive systems are needed.
5
Command & Data Handling
State of the Art: Command & Data Handling (C&DH) technologies have benefited from
advances in commercial industries. Today, C&DH systems have greater processing
capability with lower mass, power and volume requirements. This general trend is
enabling small spacecraft to tackle a broader range of missions.
Power and reliability, traditionally the primary limiting factors, have seen significant
advances due to the infusion of commercial technology and higher risk tolerance of
small spacecraft. Many small spacecraft platforms use COTS C&DH components for
quicker advances and shorter qualification timelines. While the current high rate of
progress will likely level off as the reliance on small spacecraft becomes routine for
more critical missions, the general evolution of C&DH technology for small spacecraft
remains promising.
Communications
State of the Art: Current satellite communication transmission strategies use VHF,
UHF, microwave, and infrared/visible frequency spectra. Selecting a frequency
spectrum depends on a number of factors including expected data throughput,
available power and mass, and licensing issues. Due to these reasons, technology
development is still underway on all of these frequency spectra.
Current SoA technology shows a trend of increasing carrier signal frequency and
increasing data transfer speeds. There is also a trend to increase carrier signal
frequency and the power and mass requirements of the transmitter. Using transmitter
technology appropriate for small satellites in LEO, UHF/VHF transmitters have a
maximum data transfer rate of around 38 kbps, S-band transmitters have a maximum
data transfer rate around 10 Mbps, X-band transmitters around 500 Mbps, and
K/Ku/Ka band transmitters around 1.2 Gbps. The Infrared communication system
used on NASA Ames LADEE mission has a maximum data transfer rate of 2.88 Gbps.
Developments have been made in deployable high gain antennae to facilitate high
volume data transfers. There are currently a number of deployable high gain antennae
for CubeSats and larger applications. They offer maximum gains around 15-20 dBi.
Uplink to the spacecraft via the Iridium constellation has also been demonstrated.
6
On the Horizon: CubeSat scale laser communications is a field of current interest. The
use of Iridium or Globestar for bi-directional communications is also under
investigation.
Technology Gaps: There is a need for deep space communication technology for small
spacecraft.
Integration, Launch & Deployment
State of the Art: Small satellite integration, launch, and deployment systems have
largely leveraged existing launch vehicles used for much larger payloads. Many
heritage vehicles are available with excess mass capacity for secondary spacecraft, and
a wide variety of integration and deployment systems have been developed to provide
rideshare opportunities. These rideshares help reduce costs but are often allocated
only after the primary mission defines most launch criteria. Integration and
deployment mechanisms are thus designed for minimal interference to the primary
mission, usually by providing electromagnetic shielding and shock absorption.
Adapters exist to both secure and deploy secondary payloads of various sizes.
Adapters like the Poly Picosatellite Orbital Deployer (P-POD) carry up to 6U CubeSats
and integration systems like Naval Postgraduate Schools CubeSat Launcher (NPSCul)
are available to host up to 24 CubeSats. Nanosatellites also have options of deploying
from the ISS via the Japanese Experiment Module, or riding as hosted payloads,
operating independently but sharing the power supply and transponders of a
commercial satellite. Adapters such as the Evolved Expendable Launch Vehicle (EELV)
Secondary Payload Adapter (ESPA) also exist to serve secondary payloads up to 180 kg.
SoA technologies in these areas are also responding to increased demand and
capability for small satellite missions. EELV rockets (United Launch Alliances Atlas V
and Delta IV) are currently the most frequent launchers, especially after the
development of the ESPA ring. However current launch vehicles are often unable to
meet demands for missions that need very specific science orbits, interplanetary
trajectories, precisely timed rendezvous, or special environmental considerations.
Launching as a secondary payload also limits advantages of small satellites such as
quick iteration time and low total capital costs.
7
On the Horizon: Several promising small launch vehicles, orbital maneuvering systems
(space tugs), and large CubeSat deployers are currently under development.
Technology Gaps: Dedicated launch vehicles are needed to take full advantage of
rapid iteration and mission design flexibility.
Ground Systems & Operations
State of the Art: Small spacecraft use a variety of ground system architectures,
including legacy systems with a hierarchical node topology, distributed systems with
peer-to-peer nodes participating on a voluntary basis, and low-cost single node ground
stations. The principal driver for small spacecraft ground systems is cost of
infrastructure and personnel. To reduce cost, it is common for small spacecraft ground
systems to merge the conventional control centers and ground stations in a single unit
at a single geographical location. Many developers provide single-node, turn-key
ground system solutions for purchase. Satellite phone/data networks are being tested
by some small spacecraft operators as a communication alternative to ground stations.
These ground systems command and communicate with the spacecraft using mostly
amateur radio frequency bands. Increasing mission complexity has, however, resulted
in the increased use of higher data rate and non-amateur frequencies.
On the Horizon: Open source software packages under development are enabling
distributed operations of small spacecraft through peer-to-peer ground station
networks.
Technology Gaps: To make operational costs affordable for multi-spacecraft missions
(swarms of dozens of units etc.), operations need to be conducted autonomously in
orbit or at least in a more automated way from ground.
8
I. INTRODUCTION
1. Objective
This report was commissioned by NASA's Small Spacecraft Technology Program
(SSTP) in mid-2013 in response to growing interest in using small spacecraft with
a mass less than 180 kg for many types of missions in Earth orbit and beyond. In
addition to reporting on what is currently available, we also look ahead towards
technologies on the horizon.
Information in this report has been collected essentially through desk research
and is not meant to be exhaustiveno such assessment can be comprehensive,
especially in its first release. New technology is developed continuously, and
emerging technologies will mature to become the SoA. The authors intend to
regularly update this report, and current technologies that were inadvertently
missed will be identified and included in the next version. The valuable input of
readers is solicited at arc-smallsats@mail.nasa.gov please include state of the
art report in the subject line.
2. Scope
A spacecraft is herein called a small spacecraft when its dry mass is below 180
kg. This definition adopts the terminology set out by NASAs Small Spacecraft
Technology Program (SSTP)
1
. Figure 1 gives an impression of the variety of
spacecraft that fall into the small spacecraft category.
At the upper mass limit there are minisatellites like FASTSAT (Fast, Affordable,
Science and Technology Satellite), NASAs first minisatellite mission launched in
2010 with a weight slightly below 180 kg. On the lower mass end, there are
future projects such as KickSat, with a mere size of a large postage stamp and
with a mass well below 1 kg. Spacecraft are generally grouped according to their
mass, where small spacecraft include minisatellites with a mass of 100-500 kg,
1
See http://www.nasa.gov/offices/oct/crosscutting_capability/edison/Smallsat_tech.html
9
microsatellites with a mass of 10-100 kg, nanosatellites with a mass of 1-10 kg,
and picosatellites with a mass below 1 kg.
!"#$#"$
Figure 1: Overview of the variety of spacecraft that fall into the small spacecraft category.
CubeSats are a type of small spacecraft that weigh only a few kilograms and are
built using a standard form factor relying on a 10 cm
3
cube. CubeSats can be
composed of a single cube (nicknamed a 1U unit) or several cubes combined
forming, for instance, 3U or 6U units (see Figure 2). Due to their high popularity
and their increased usage in recent times, particular emphasis is put on the SoA
of CubeSat technology in this report (see also Figure 2).
A table of the small spacecraft missions that have been studied to assess the
state of the art of small spacecraft technology is provided in Appendix I.
Although the list gives a good overview of current endeavors it is not meant to
be exhaustive. Along the same line of thought the technology tables shown in
subsequent Sections are not meant to be comprehensive. Their goal is to
illustrate the current SoA based on what could be found through desk research
in a limited amount of time.
10
Figure 2: (Left) Launch dates vs mass of the small spacecraft studied in this report (see Appendix I
for more detail). Spacecraft below the red line are essentially CubeSats with 15 kg or less. The
recent trend in the increased use of CubeSats is visible (along with a depletion of launches in the
15 kg-100 kg). (Right) CubeSats with a form factor of 1U, 3U, and 6U, respectively. The volume of
the 1U base unit is 10 cm
3
.
3. Assessment
The SoA assessment of a technology is
performed using NASAs TRL scale
(http://www.nasa.gov/content/technology-
readiness-level; see Figure 3). A technology is
deemed SoA whenever its TRL is larger than or
equal to 6. A TRL of 6 indicates that the model or
prototype is near the desired configuration in
terms of performance, weight, and volume, and
has been tested and demonstrated in a relevant
environment
2
. A technology is considered not
SoA whenever its TRL is lower than or equal to 5.
In this category, the technology is considered to
be on the horizon
3
.
!"!
#!"!
$!"!
%!"!
&!"!
'!!"!
'#!"!
'$!"!
'%!"!
'&!"!
!()#$)'**& !$)'*)#!!' !')'$)#!!$ '!)'!)#!!% !()!%)#!!* !$)!')#!'# '#)#()#!'$
+,- '**& /01 #!!' +23 #!!$ 456 #!!% +,- #!!* /01 #!'# +23 #!'$
7
2
8
8
9
:
;
<
Figure 3: NASA Technology
Readiness Levels (TRLs).
2
A relevant environment is either a high fidelity laboratory environment or a simulated operational
environment. See http://www.nasa.gov/content/technology-readiness-level
3
The above definition of state of the art has essentially been chosen because of its inherent
simplicity. Clearly, old and possibly obsolete technology has a TRL larger than 6 but cannot be
considered as state of the art. The bias in the definition has been recognized and care has been
taken in the report to exclude obsolete technology from the study.
11
4. Overview
This report is laid out as follows: in Section II the SoA of small spacecraft
technology is addressed by focusing on the spacecraft system as a whole. The
current best practices of integration are presented. Then, in Sections III-XI, the
SoA of the spacecraft subsystems are presented in turn:
Power
Propulsion
Attitude Determination and Control System (ADCS)
Structures, Materials and Mechanisms
Thermal Systems
Command and Data Handling (C&DH)
Communications
Integration, Launch and Deployment
Ground System and Operations
Conclusions on the overall SoA of small spacecraft are given in Section XII.
Appendix I shows a number of tables that have not been inserted earlier for the
sake of readability.
12
II. SPACECRAFT
1. Introduction
In recent years, increasing attention has been paid to smaller spacecraft enabling
low-cost missions through the utilization of COTS technology, consumer
technology, rapid prototyping, and ride shares. In order to drastically reduce
mission costs, the objective is to have one or more small spacecraft complete the
same tasks as their larger counterparts.
2. State of the Art
Small spacecraft missions are made possible through miniaturization
technologies. Miniaturization is the act of creating systems of ever-smaller scales
and thereby increasing the functional density of the product. Devices have a
comparable capability, but are of smaller size than their predecessors. Perhaps
the most famous example of this trend is Moores law, which roughly states that
the number of transistors on integrated circuits doubles every two years (Moore,
1998): this trend has remained valid since the invention of the integrated circuit
in the late 1950s. Although Moores two-year law cannot be applied directly to
small spacecraft, a significant amount of miniaturization has been achieved for
spacecraft subsystems and components. Figure 4 illustrates this trend.
13
Figure 4: Integration of various spacecraft. (Left) large spacecraft clean room (Intelsat 10-02,
image credit: EADS Astrium); (Right) Integration environments for small spacecraft FASTSAT (Top)
and Phonesat (Bottom). The blue and green rectangles highlight the differences in size compared
to Intelsat 10-02.
An example of a miniaturizing technology is the use of micro-electro-mechanical
systems (MEMS). In this field of research, cleanroom processes inherited from the
semiconductor industry are used to bridge the disciplines of electronics and
mechanics (as well as areas such as optics and fluidics) to produce devices with
feature-sizes on the microscale ("m). This not only enables devices with a higher
functionality density, but also with potential performance improvements such as
higher sensitivity and lower power consumption. MEMS devices are mostly used
on spacecraft as sensors (see Figure 5) and, to a lesser extent, as actuators.
Sensors convert signals from one energy form to another (for example a
movement or a temperature change into an electrical signal). Actuators perform
the opposite transformation, converting electrical signals into a mechanical
action or motion.
14
Figure 5: A miniaturized 3-dimensional magnetometer with MEMS sensors and electronics (left,
credit ASTC), which was flown on the Vietnamese CubeSat F-1 (right), one of three CubeSats
deployed from the ISS in 2012.
The highest level of integration is achieved when individual components are
integrated all onto the same substrate to form the subsystems of the spacecraft.
The closest example to this is the previously mentioned picosatellite KickSat. The
dead mass and space are decreased as a function of the density at which
different components are assembled. The functionality density of the system
increases and tends to lower the associated power requirements. The speed and
stability of the system increase as well. The SoA of the level of integration is
driven by consumer electronics.
Some small spacecraft are assembled and integrated with the same rigor as their
larger counterparts, while other small spacecraft never see the inside of a
cleanroom and are built in a normal laboratory environment. In the realm of
CubeSats, it is easy to build or buy the subsystems and integrate them into a
complete spacecraft on a normal workbench; the spacecraft performance
achieved may not be exactly the same, but the total mission cost is drastically
reduced.
3. On the Horizon
Current research focuses on further reducing the time and cost of building and
integrating a satellite. This may be enabled through a number of approaches,
such as reinforced usage of COTS and consumer electronics for which highly
miniaturized and integrated components are readily available. Plug-and-play
technology will allow rapid assembly of a specific satellite using a collection of
general subsystems. Rapid prototyping and 3-D printing of structures,
15
components, and even complex subsystems will enable faster and much more
flexible manufacturing processes.
On the lower mass limit, the future may see the arrival of standardized ChipSats,
built out of highly integrated components fulfilling all the needs of a satellite on
a single chip (Johnson & Peck, 2012).
4. Conclusion
Small spacecraft missions are a low-cost alternative to large spacecraft missions.
There is a trade-off to be made between the size of a spacecraft and its
functionality. Advances in both miniaturization and integration technologies
have diminished the scope of that tradeoff.
Small spacecraft technology is made possible through miniaturization, COTS
products and consumer products.
Some small spacecraft are assembled and integrated with the same rigor as their
larger counterparts. Others have never seen the inside of a clean-room and have
been integrated within a university laboratory.
The SOA of small spacecraft integration methods is as advanced as the one
relating to larger spacecraft. COTS components are commonly used to build
small spacecraft at the lower end of the cost range.
5. References
Johnson, M. I., Peck, M. A.: KickSat, an Open Source ChipSat Dispenser and Citizen
Space Exploration Proof of Concept Mission. 4th European CubeSat Symposium.
Bussels, Belgium, 2012.
Moore, G. E.: Cramming more components onto integrated circuits. Proceedings of
the IEEE, 86(1), p. 4, 1998.
16
III. POWER
1. Introduction
Spacecraft function relies on electrical power. The power system typically
accounts for 20-30% of the total spacecraft mass. The three subsystems are
power generation, storage, and distribution (Lyons, 2012). Each subsystem is
approximately one third the total power system mass. Mission requirements for
average and peak power, solar intensity, and duration of eclipses dictate the
system architecture. While long missions require power generation, shorter
missions can solely rely on energy stored in batteries. The NASA Technology
Roadmap aims to improve power systems for all spacecraft weight classes,
however not all of these technologies are applicable to small satellites.
2. State of the Art
2.1 Power Generation
Solar cells generate electricity by harvesting Sunlight using the photovoltaic
effect. Solar intensity varies as the inverse square of the distance from the Sun.
The amount of energy converted varies as a cosine function of the angle between
the cell and the Sun. Solar cells degrade during their mission lifetime. This is
characterized by the End of Life/Beginning of Life (EOL/BOL) ratio, which can be
as high as 96% and low as 60%. The solar cell output at EOL will determine size
requirements for the particular mission. A protective coverglass material over
the cell resists light-reflection, darkening, and ultraviolet radiation damage.
Triple junction solar conversion efficiency is about 29% in production while
research cells approach 38%. The cells usually include protective diodes to stop
reverse current flow when the cells are in partial shadow while in space. Solar
panels are assembled from individual cells. State of the art panels suitable for
CubeSats can provide more than 50 W according to kit manufacturers. Spectrolab
Inc., produces a Triangular Advanced Solar Cell (TASC), which has the advantage
of fitting odd form factors on small satellites without the need to custom cut
individual solar cells. Other issues with turning cells into panel arrays involve
matching individual cells in terms of current and voltage (Kalman, 2012).
17
Table 1: Power generation with solar cells for small satellites.
Technology
Description Developer TRL Status
Name
Figures
Triangular shape,
Improved Triple
Junction (ITJ),
Efficiency 27%
Solar cell
SpectroLab
(USA)
9
On orbit
Solar cell
NeXt Triple Junction
(XTJ), Efficiency 29.5%
SpectroLab
(USA)
9
On orbit
Solar cell
BTJ / ZTJ Space Solar
Cell, Efficiency 27-
29.5%
Emcore
(USA)
9
On orbit
Solar cell
Triple Juction Solar
Cell, 3G28 / 3G30
Efficiency 28 -30%
AzurSpace
Solar
(Germany)
9
On orbit
Solar panel
Panel of SpectorLab or
AzurSpace cells
Clyde
(UK)
9
On orbit
Solar panel
PMDSAS for 1/2/3U
CubeSats
Pumpkin
(USA)
9
On orbit
2.2 Energy Storage
During eclipse periods or peak power needs, batteries use chemically stored
energy as the source of power. Primary one-time-use batteries can have a long
mission life; however their chemistry differs from that of rechargeable batteries.
Battery technology is at TRL 9 and includes 3.7 V Lithium Ion batteries, usually in
cylindrical form factor of 18.4 mm by 65.1 mm, and the latest lithium polymer
batteries in a flat form factor such as used in modern mobile phones. Table 2
and Table 3 illustrate the general characteristics of different battery types for
small spacecraft.
18
Table 2: General characteristics of battery technology (Lyons 2012).
Specific
Energy
(Wh/kg)
Energy
Density
(Wh/l)
Operting
Temp. Range
(C)
Mission Life
(yrs)
Battery Chemistry Mission Cycle Life Issues
Launch
vehicles,
Cassini, MER
lander,
Sojourner
Rover
Primary
Ag-Zn
Li-SO2
Li-SOCl2
90-250 130-500 -20 to 60 1 1-9
Limited temp.
range &
voltage decay
Rechargable
Ni-Cd
Ni-H2
ToPex, HST,
Space Station
24-35 10-80 -5 to 30
>50,000 @ 25%
DOD
>10
Heavy/bulky
& temp. range
Advanced
Li-Ion
Li-Polymer
MER rovers,
Cubesat
100 250 -20 to 30
>400 @ 50%
DOD
>2 Cycle life
Batteries are a commodity item available from a variety of manufacturers in raw
form; raw meaning unprotected from thermal runaway. Batteries can have
protection circuits built into the individual cell, and without protection circuits
they are referred to as raw batteries. Li-Ion batteries have one-time thermal
protection that opens the circuit to prevent thermal runaway conditions. Small
satellite engineers perform acceptance testing on individual COTS battery cells
and assemble them into battery packs according to mission needs. As an
alternative to buying COTS batteries, there are also companies that make their
own space-qualified batteries.
19
Table 3: Battery options for small satellites.
Technology
Name
Description Developer TRL Status Figures
Primary battery
Ag-Zn, SZHR50, 0.76kg,
1.5 V, 50 AHr
Eagle Picher
(USA)
6
Not flown on small
satellite
Primary battery
Ag-Zn, Silvercels, 1.5 V,
0.1-20k AH
Yardney
(USA)
6
Not flown on small
satellite
Rechargable
battery
Ni-H2, SAR10097, 28kg,
10 V, 75 AHr
Eagle Picher
(USA)
6
Not flown on small
satellite
Advanced
battery
Li-Ion, custom from
space qualified COTS
ABSL Space
Products
(UK / USA)
6
Not flown on small
satellite
Advanced
battery
Li-Polymer, 8.2 V, 1.24
Ahr
Clyde Space
Ltd.
(UK)
6
Not flown on small
satellite
Advanced
battery
Li-Ion #VEL / #VL, 3.6
V, 4.5 - 50 Ahr
Saft SA
(France/
USA)
6
Not flown on small
satellite
Advanced
battery
Li-Ion #18650HC raw
#19670 protected
Sony
(Japan)
6
Not flown on small
satellite
6
Not flown on small
satellite
Advanced
battery
Li-Ion Lithion 3.6V 7-
350 AHr
Yardney
(USA)
2.3 Power Management and Distribution
Satellite power distribution architectures include voltages regulated centrally or
distributed along with Direct Energy Transfer (DET) or Peak Power Tracking
(PPT); small satellites follow the same power distribution architectures as well. A
study of 33 CubeSat power systems where data was available revealed 20
centralized and five distributed with 13 DET and 15 PPT, with DET favored in the
20
newer designs (Burt, 2011). In a DET architecture, the regulation mechanism
matches the solar power voltage to the load(s) and there are no intermediate
components to dissipate excess power, thus making it the most efficient power
regulation of the two available methods. A PPT design has a series regulation
device between the solar arrays and loads, which regulates how much current is
extracted from the array (Burt, 2011). Nanosatellite Electrical Power Systems (EPS)
typically have a main battery bus voltage of 8.2 V but can distribute a regulated
5.0 V and 3.3 V to various subsystems. The EPS also protects the electronics and
batteries from non-nominal current and voltage conditions. The main
commercial CubeSat EPS suppliers are Pumpkin Inc., GomSpace ApS., Stras Space,
and Clyde Space Ltd. The manufacturers datasheets generally mention quality
and acceptance component testing as well as flight qualified heritage. SpaceMicro
Inc., lists commercially-available radiation-hardened systems and testing
methods for qualifying systems for space applications. Improvements in the
electronic components for the power management and distribution systems are
due to trends in consumer electronics rather than manufacturers being
responsive to the needs of the space industry.
3. On the Horizon
3.1 Power Generation
There are new technologies for power generation that are currently being
assessed for smaller spacecraft applications. The areas include improved solar
efficiencies, regenerative fuel cells, space tethers, and numerous methods to
harvest the heat from radioactive decay. Four-junction solar cells are on a
roadmap to reach 50% efficiency, but currently research laboratory cells are at
43% under concentrated solar conditions. Specification sheets are not available
so it is unknown if the addition of another layer on the solar cell (the fourth
junction) results in an equivalent powerto-weight-ratio.
Fuel cells might be a more effective technology to generate power during long
eclipse periods when compared to photovoltaics and battery power; however, no
fuel cell has advanced beyond laboratory tests. In addition to system lifetime, the
obstacles to overcome include minimizing mass, volume, and the parasitic power
21
requirement. One development program by Boeing/Saint Louis University called
BillikenSat-II was a CubeSat that was powered by beer, but the status of the
program is unknown (Pais, et al., 2007). Figure 6 shows the relative energy
densities of fuel cells (Pais et al., 2007). It should be noted that fuel cells cannot
be recharged on orbit hundreds of times like advanced batteries, but
regenerative fuel cells are also being researched. Another program is the 2011
JPL/USC 300 W suitcase-sized prototype Direct Methanol Fuel Cell developed for
DARPA at TRL 3 (Vega, 2011).
Figure 6: Relative stored energy for candidate fuel cells (Pais et al., 2007).
Although electrodynamic power generation is possible using conductive space
tethers, as shown with the Tethered Satellite System aboard STS-75, no tests are
planned on small satellites. Electric tethers require the magnetic field of the
Earth to harvest electrons at the cost of reducing the orbital kinetic energy. The
satellite must be launched to a sufficiently high altitude to prevent reentry due
to drag before the mission ends, but the output can be several hundred volts per
kilometer of tether.
Another method in power generation is utilization of radioactive decay. Small
nuclear devices have the potential to be an enabling technology for small
satellites and landers if solar energy is unavailable. Figure 7 shows that
radioisotope thermoelectric generators (RTG) have been used for primary power
supply since the beginning of the space program. The smaller Multi-Mission RTG
(MMRTG) used on the Mars Science Lab Curiosity has a mass of 44 kg and
22
generates 125 W, which could be utilized on
small satellites. There are also lightweight
Radioisotope Heating Units (RHU), shown in
Figure 8, used to keep components like
circuits and rechargeable batteries above
0#C.
A full size RTG, such as on New Horizons
mission to Pluto (Radioisotope Power
Systems, New Horizons 2012), has a mass of
56 kg and can supply 300W (6.3% efficiency)
at the beginning of its life. Future
developments on Advanced Stirling
Radioisotope Generators (ASRG) are looking
to increase efficiency to 28% with a mass of 20
kg to generate 143 W, but are only at TRL 5
(Vining & Bennett, 2010).
Figure 7: Evolution of RTG technology.
Radioactive heat sources are mainly Plutonium-238 in the form of Plutonium
Oxide, PuO2, with a half-life of about 87 years. Other candidates are Curium-242
and Americium-241. Generally, power density roughly scales inversely with half-
life. Americiums power density is less than a quarter of Plutonium with a half-
life of 432 years. Compared to
Plutonium, both require more radiation
shielding, with Curium requiring
significantly more due to gamma
particle emission. Americiums lower
output results in a higher mass system
for the same electrical output.
At a lower TRL, beta- and alpha-voltaic
power conversion systems use a
secondary material to absorb the
energetic particles and re-emit the
Figure 8: Light Weight Radioisotope Heater
Unit compared to the size of a U.S. one cent
penny (Cataldo et al., 2012).
23
energy through luminescence. These photons can then be absorbed via
photovoltaic cells. Methods for retrieving electrical energy out of radioactive
sources include beta-voltaic, alpha-voltaic, thermophotovoltaic, piezoelectric, and
mechanical conversions.
Thermophotovoltaic power converters are similar to high TRL thermoelectric
converters, with the difference that the latter uses thermocouples and the former
uses infrared-tuned photovoltaic cells. Thermophotovoltaics are technically
challenging because they require the radioisotope fuel to have a temperature of
>1273 K for high infrared emission, whilst maintaining temperature suitable for
photovoltaic cells (<323 K) for efficient electrical conversion. These devices are
predicted to produce tens of watts of power at specific powers of 6 W/kg. The
radioisotope fuel of choice is Plutonium-238 in the form of Pu-O
2
, which,
however, requires Congressional authorization to use. Other options are Curium
and Americium.
Piezoelectric power converters are miniature electromechanical devices that
utilize a cantilever beam system to convert vibrational energy into electrical
energy via a piezoelectric thin-film. A miniature cell has been tested to produce
15 !W with dimensions 4.5 mm " 2 mm " 1 !m.
NASA Glenn is developing both the Small Radioisotope Power System (SRPS), and
the ASRG shown in Figure 9. These utilize linear Stirling actuators and a 30%
efficient thermodynamic cycle using a piston to convert thermal and mechanical
energy to electrical energy. A single SRPS device is aimed at producing 80 W of
power with a specific power of 7 W/kg.
Table 4 shows future
technologies in power
generation for small
satellites. The table is
heavily weighted to using
radioisotope heat sources
and advanced mechanical
Figure 9: Advanced Stirling radioisotope generator
(Cataldo et al., 2011).
24
or photovoltaic harvesting methods. NASA Glenn is the lead center in space
power generation research.
Technology
Name
Description Developer TRL Status Figures
Primary battery
Ag-Zn, SZHR50, 0.76kg,
1.5 V, 50 AHr
Eagle Picher
(USA)
6
Not flown on small
satellite
Primary battery
Ag-Zn, Silvercels, 1.5 V,
0.1-20k AH
Yardney
(USA)
6
Not flown on small
satellite
Rechargable
battery
Ni-H2, SAR10097, 28kg,
10 V, 75 AHr
Eagle Picher
(USA)
6
Not flown on small
satellite
Advanced
battery
Li-Ion, custom from
space qualified COTS
ABSL Space
Products
(UK / USA)
6
Not flown on small
satellite
Advanced
battery
Li-Polymer, 8.2 V, 1.24
Ahr
Clyde Space
Ltd.
(UK)
6
Not flown on small
satellite
Advanced
battery
Li-Ion #VEL / #VL, 3.6
V, 4.5 - 50 Ahr
Saft SA
(France/
USA)
6
Not flown on small
satellite
Advanced
battery
Li-Ion #18650HC raw
#19670 protected
Sony
(Japan)
6
Not flown on small
satellite
6
Not flown on small
satellite
Advanced
battery
Li-Ion Lithion 3.6V 7-
350 AHr
Yardney
(USA)
Table 4: Future technologies in power generation for small satellites.
3.2 Energy Storage
There is nothing to indicate new battery technology developments for small
satellite systems. One issue may be that large firms are not actively marketing to
the small satellite manufacturers. COTS batteries are put through quality
assurance testing and then custom integrated into products intended for the
small satellite market.
25
3.3 Power Management and Distribution
There is a general need to miniaturize and radiation-harden electronic
components for single event upsets. No evidence of progress in that direction
(focused on small satellite technology) could be found during the limited amount
of time assigned to this study.
4. Conclusion
Small spacecraft are using advanced power generation and energy storage
technology, namely 29% efficient triple-junction solar cells and lithium ion
batteries. Todays small spacecraft mission designers are faced with stringent
mass and volume restrictions and requirements and have a higher risk
tolerancewhich has led to the industrys early adoption of flat lithium polymer
battery packs. All the power subsystems benefit from technology advances and
component miniaturization in the consumer electronics market. Figure 10 shows
the general trend of solar cell efficiency over the last three decades. Figure 11
shows energy storage density by volume and mass versus battery chemistry.
Figure 10: Advances in solar cell efficiency by cell type (National Renewable Energy Laboratory,
2013).
26
Figure 11: Comparison of energy storage density by volume and mass versus battery chemistry
(Wagner, 2006 Woodbank Communications, Ltd).
5. References
Anonymous: Datasheet [Online], 2002. Available at:
http://www.spectrolab.com/DataSheets/PV/PV_NM_TASC_ITJ.pdf
[Accessed August 2013].
Banks, J.: Technology Thrusts [Online], 2012. Available at:
https://rt.grc.nasa.gov/power-in-space-propulsion/photovoltaics-power-
technologies/technology-thrusts/ [Accessed August 2013].
Burt, R.: Distributed Electrical Power System in CubeSat Applications. s.l.: All
Graduate Theses and Dissertations. School of DigitalCommons@USU, 2011.
Cataldo, R., Bennett, G.: US Space Radioisotope Power Systems and Applications:
Past, Present and Future. Cleveland: s.n., 2011.
Dimroth, F.: 43.6 % Four-Junction Solar Cell under Concentrated Sunlight New
Manufacturing Technologies allow for Higher Efficiencies [Online], 2013.
Available at: http://www.ise.fraunhofer.de/en/press-and-media/press-
releases/presseinformationen-2013/43.6-four-junction-solar-cell-under-
concentrated-Sunlight [Accessed August 2013].
27
Dow, A., Schmid, U., Kherani, N. P.: Analysis and Modeling of a Piezoelectric
Energy Harvester Stimulated by !-emitting Radioisotopes. Smart Materials and
Structures Journal, 20(1), pp. 1-9, 2011.
Dyches, P.: Radioisotope Power Systems, New Horizons [Online], 2012.
Available at: http://solarsystem.nasa.gov/rps/newhorizons.cfm
[Accessed August 2013].
Fraeman, M. et al.: Small Radioisotope Power System at NASA Glenn Research
Center. s.l.:s.n., 2011.
Furano, G.: Review of Rad Hard electronics activities at European Space Agency.
Topical Workshop on Electronics for Particle Physics (TWEPP). Oxford, UK, 2012.
Kalman, A.: Enhanced Power Systems for CubeSats. San Luis Obispo, s.n., 2012.
Landis, G. et al.: Non-solar photovoltaics for small space missions. Austin, s.n., p.
2819 2824, 2012.
Lange, R., Carroll, W.: Review of Recent Advances of Radioisotope Power Systems.
Energy Conversion and Management Journal, 49(3), pp. 393-401, 2008.
Lyons, V. J., Gonzalez, G. A., Houts, M. G., Iannello, C. J.: Space Power and Energy
Storage Roadmap, Technology Area 03. s.l., NASA, 2012.
Otting, W., Gard, L., Hammel, T. E., Bennett, R.: Preparation of the MMRTG for the
Mars Science Laboratory Mission. Atlanta, s.n., 2012.
Reinhard, W.: Electropaedia. [Online], 2006.
Available at: http://www.maximintegrated.com/app-notes/index.mvp/id/3958
Vega, P.: JPL-Developed Clean Energy Technology Moves Forward [Online], 2011.
Available at: http://www.jpl.nasa.gov/news/news.php?release=2011-163
[Accessed August 2013].
Vining, C., Bennett & Gary, L.: Power for Science and Exploration: Upgrading the
General Purpose Heat Source Radioisotope Thermoelectric Generator. Nashville,
s.n., pp. 1-15, 2010.
28
IV. PROPULSION
1. Introduction
Miniaturized propulsion systems for small spacecraft are advancing rapidly in
ability and are the subject of great attention. Small spacecraft have numerous
proposed objectives that can be attained by using propulsion systems:
responsive space systems and communication platforms; distributed and
fractionated satellite architectures that rely on precise formation flying; and
scientific research and remote sensing of Earth and beyond.
Although numerous systems such as ion electrospray and miniaturized Hall
thrusters are currently in development and show great promise for high specific
impulse and efficiency, the SoA in small satellite propulsion is limited to cold gas
thrusters, solid rocket motors, and pulsed plasma thrusters. However, serious
challenges exist for such systems to achieve a mature level of adoption and flight
heritage. Associated technology requirements for the full utilization and
realization of small spacecraft propulsion are deployable solar arrays, thermal
management systems, and miniaturized power processing units (PPUs) sufficient
for high voltage requirements. The increase in mission capabilities provided by
small satellite propulsion is also proving to be a driver for development by
numerous institutions.
As a secondary payload, small spacecraft cannot interfere with the primary
mission, which has led to the development of relatively benign thruster
technologies such as cold gas and electric propulsion. While some small satellites
can be custom built and launched as a higher priority or primary mission, the
CubeSat Design Specification (CDS) agreed upon between CubeSat builders and
launch vehicle providers require a waiver to deviate from general requirements
(CDS Rev 13, 2013). These requirements limit potential propulsion systems in
addition to CubeSat dimensions: less than 1.33 kg mass for 1U, up to 4.0 kg
mass for 3U, pressurization less than 1.2 standard atmospheres, less than 100
W-Hr of stored chemical energy, and no hazardous materials.
29
2. State of the Art
2.1 Cold Gas Thrusters
The simplest propulsion system available to small spacecraft vents a cold,
pressurized gas through a nozzle. The specific impulse of a cold nitrogen gas
system is less than 75 sec and thrust levels are less than 5 N. The system does
not have a pump and is referred to as a blow down system, where the pressure of
the system decreases with time. It is possible to have a high-pressure tank with a
regulator to vent the gas at a lower pressure for a longer amount of time, but the
total impulse delivered is the same since it is a function of the pressure force
over time. Many cold gas systems used on larger satellites are theoretically
usable on small satellites, however their use on CubeSats may be limited due to
valve power requirements even if sufficiently low in mass and volume. While no
CubeSat has yet flown a cold gas thruster, Surrey Space flew SNAP-1, a 6.5 kg
small satellite with a 450 g butane cold gas system from Polyflex Aerospace, Ltd,
which performed proximity operations on orbit.
Different gases are available as propellants; nitrogen and helium are popular for
pressurization because they do not chemically react, but they may require a
pressure regulator to function with an on/off valve. Propellants with a critical
temperature above the ambient exist only in the gas phase, while those below the
critical temperature are liquid. Propellants below the critical temperature such as
propane, sulfur hexafluoride, and butane are self-pressurizing, negating the need
for a pump, and they have a higher storage density in liquid form. Because
operational safety is of primary importance in CubeSats, there is active
development of cold gas systems for small satellites. Butane has the lowest vapor
pressure at room temperature, as shown in Table 5. Because butanes low
pressure allows for non-spherical or flat-wall tank designs, 3D-printers can
manufacture conforming tanks.
30
Table 5: Comparison of propellants used in cold gas systems.
Table 6 shows the SoA in cold gas systems. Currently, several nitrogen cold gas
systems are available, yet many systems may prove to be ineffective on a small
satellite due to limitations of valve power, volume, and mass requirements.
Table 6: List of a few small satellite cold gas propulsion systems.
Technology
Name
Description Developer TRL Status Figures
Cold gas
thruster
n-Butane, 0.025 N
Isp 70 sec
VACCO
Space
(USA)
7
Tested, not flown
Polyflex
Aerospace
LTD
(UK)
Cold gas
thruster
MPS, n-Butane, 0.01N
Isp 69 sec
9
Flown on SNAP-1
Cold gas
thruster
SF6, 0.05 N, Isp 45 sec
VACCO
Space
(USA)
9
Flown on Can X-2
58E143/144/145/146
Nitrogen, 0.016-0.04 N
Isp 65 sec
Cold gas
thruster
Moog
(USA)
9
NASA CHAMP
31
2.2 Chemical Propulsion
Chemical propulsion systems use a chemical reaction to produce a high-pressure,
high-temperature gas that accelerates out of a nozzle. Chemical propellant can
be liquid, solid or a hybrid of both. Liquid propellants can be a monopropellant
passed through a catalyst. A more conventional bipropellant is a mix of oxidizer
and fuel. A solid rocket motor contains both an oxidizer and a fuel that are
molded into various grain patterns.
The benefits of monopropellants and solid systems include relatively low-
complexity/high-thrust output, low power requirements, and high reliability.
Liquid and hybrid systems can be stopped and re-started, and in some cases
throttled, whereas solid motors can only be used once. The highest thrust and
highest specific impulse systems are bipropellant but they are more complex, not
miniaturized, and are not meant for low thrust applications. Table 7 shows a
variety of propellants from different systems, including cold gas for comparison.
Table 7: Comparison table of propellant options, efficiency, and thrust for small satellites.
Table 8 show monopropellant and solid systems available for use on small
spacecraft. It is important to note that, at the time of this study, virtually no
bipropellant systems were suitable for small spacecraft.
32
Table 8: List of select small satellite chemical propulsion options.
Technology
Name
Description Developer TRL Status Figures
Monopropellant
thruster
GPIM, HAN (AFM315E),
1N - 22 N, Isp 250 sec
NASA
Glenn, Ball
Aerospace
(USA)
6
GPIM datasheet, Falcon
Heavy launch 2015
Monopropellant
thruster
HPGP, ADN (FLP106),
1 N, Isp 220 sec
ECAPS, SSC
Group,
(Sweden)
6
PRISMA satellite
demonstration
Monopropellant
thruster
MR-140, Hydrazine,
1 N, Isp 202 sec
Aerojet
(USA)
7
Champs system
Solid rocket
motor
STAR 4G, Solid, 257
N, Isp 269 sec
ATK
(USA)
7
Two test, 0 flights
9
Six tests, 3 flights
Solid rocket
motor
STAR 5A, Solid, 169
N, Isp 250 sec
ATK
(USA)
In recent years, there has been more of a push to move from toxic propellants
(hydrazine and nitrogen tetroxide) to greener, less-toxic propellants such as
hydrogen peroxide (H
2
O
2
) or nitrous oxide fuel blend (NOFB), and ionic liquids
such as hydroxyl ammonium nitrate (HAN), hydrazinium nitroformate (HNF) and
ammonium di-nitramide (ADN). One such program for small satellites is NASA
Glenns Green Propellant Infusion Mission (GPIM) using HAN, which plans to fly
on a SpaceX Falcon Heavy launch in 2015. OHB-Swedens PRISMA project has a
high-performance green propellant ADN 150 kg satellite demonstration called
Tango.
2.3 Electric Propulsion
Electric propulsion systems produce thrust generally by producing plasma and
accelerating it electromagnetically out of the thruster. The plasma can be
produced through various discharge mechanisms such as with electrodes or
antennas, and can use a variety of propellants ranging from solids to gasses. The
advantage of an electrical propulsion system over chemical propulsion systems
33
is that the propellant is separated from the power source (typically solar
photovoltaic arrays) and as such the thruster is not limited by the energy of a
chemical reaction. Plasma thrusters are capable of high specific impulse and long
burn durations, thus allowing for high delta-V maneuvers.
Electric propulsion systems have a long flight heritage on satellites, with
hundreds of ion thrusters and Hall effect thrusters being flown since the 1970s.
Similarly to chemical thrusters, miniaturized plasma thrusters for small satellites
are a relatively new technology and development is currently underway.
Nevertheless, there are pulsed plasma thrusters (PPT) that have flown on
missions, and should be considered SoA.
Pulsed plasma thrusters produce plasma by ablating solid Teflon with an arc
discharge across electrodes. The plasma is then accelerated electromagnetically
to produce thrust. Busek Company, Inc., has developed the Micro Propulsion
Attitude Control System (MPACS, see Figure 12), which has flown on the Air
Force Academy CubeSat FalconSat-3. MPACS provided attitude control for the
CubeSat with 80 Ns impulse bits at 830 sec Isp. Aerojet also has a similar EO-1
PPT that flew on NM EO-1, and the thruster has similar specifications (650-1400
sec Isp, 90-860 Ns impulse bit, at 5 kg thruster mass).
Figure 12: Busek MPACS (Busek datasheet).
34
3. On the Horizon
3.1 Chemical Propulsion
Monopropellant hydrazine thrusters have a long heritage as ADCS thrusters
since as early as 1966 (Mueller et al.). Recently JPL has developed a CubeSat scale
hydrazine thruster, the Hydrazine Milli-Newton Thruster shown below in Figure
13, capable of 150 sec Isp and 129 mN thrust at 40 g of thruster mass and 8 cm
3
volume. The power requirements of the thruster are low at an instantaneous 8 W
for valve opening and a continuous 1 W during the burn.
Figure 13: JPL hydrazine Milli-Newton thrusters (Mueller et al.).
Another group researching green propellants at Austrian Research Centres
Seibersdoorf (ARCS) is using hydrogen peroxide as their monopropellant, a fuel
which has an equivalently long flight heritage (1960s) as hydrazine. Scharlemann
et al. at ARCS have demonstrated their Miniature Hydrogen Peroxide Thruster
(Figure 14) as capable of 100-800 mN at 153 sec Isp. The power requirement is
higher for heating the catalyst bed, around a continuous 10 W.
35
Figure 14: Miniature hydrogen peroxide thruster (Scharlemann et al.).
Bipropellants offer the capability of higher specific impulse than
monopropellants, with the disadvantage of requiring separate storage tanks for
oxidizer and fuel. Tethers Unlimited overcomes this challenge with their Hydros
thruster (Figure 15) by storing the hydrogen and oxygen propellants as water,
and then generates them into gaseous form through electrolysis. They have so
far demonstrated 0.8 N of thrust at 300 sec Isp. Bipropellant thrusters, as with
previously mentioned chemical propulsion technologies, have a long flight
heritage on large satellites and are in development for small satellites.
Figure 15: Hydros thruster (Tethers Unlimited datasheet).
36
3.2 Electric Propulsion
As there currently are numerous electric propulsion technologies being
developed for small satellites, this section will be limited to a selection of several
different candidates. These include vacuum arc, hall effect, gridded ion,
electrospray, and helicon thrustersall of which are at various TRL designations
of 5 or below.
NASA JPL is developing a vacuum arc thruster (see Figure 16) that creates plasma
from an arc discharge between two solid electrodes. The plasma then expands
and accelerates out of a magnetic nozzle, creating thrust. The laboratory
demonstrated specifications are 125 N thrust and 1500 sec Isp at 40 g mass and
10 W power. The plasma emitted from the thruster is quasi-neutral and thus
does not require a neutralizer to prevent spacecraft charging.
Figure 16: JPL vacuum arc thrusters (Mueller et al.).
Princeton Plasma Physics Laboratory is developing a cylindrical Hall thruster
(Figure 17) capable of 3-6 mN and 1200-2000 sec Isp at 50-170 W power and < 1
kg mass. The Hall thruster forms plasma by electron bombardment of a neutral
gas, and the resulting ions are accelerated out of the chamber due to an
electrostatic potential difference. A neutralizer in the form of an electron-
emitting cathode is required in order to prevent spacecraft charging, and the
miniaturization of thermionic cathodes has been a challenge facing developers.
37
Figure 17: PPPL cylindrical Hall thruster (Mueller et al.).
JPL is also producing a RF plasma discharge gridded ion thruster called the
Miniature Xenon Ion Thruster (MiXI, shown in Figure 18). MiXI is capable of 1.5
mN thrust and 3200 sec Isp, uses 50 W of power and has a mass of 200 g. The
plasma in RF discharge is formed by accelerating electrons in an oscillating
electromagnetic field and causing ionization upon neutral particle bombardment.
The ions are then accelerated out of the thruster via electrostatic potential grids,
and thus a neutralizer is also required.
Figure 18: JPL Miniature Xenon Ion thruster (Mueller et al.).
Electrospray thrusters function by electrostatically accelerating charged liquid
particles, usually from a volatile ionic liquid, and thus do not require any
mechanism to form a plasma discharge. These are beneficial and much more
efficient than miniature plasma thrusters. Busek Corporation has also developed
38
an electrospray thruster (Figure 19) with specifications of 1 mN thrust and 400
1300 sec Isp, while consuming 8.5 x 8.5 x 6 cm and 10 W power. The electrospray
thruster also requires a neutralizer to prevent spacecraft charging and spacecraft
contamination.
Figure 19: Busek PUC electrospray thruster.
Two new plasma thrusters being developed are the CubeSat Ambipolar Thruster
(CAT, Figure 20) at University of Michigan and the mini Heated Helicon Thruster
(mH2T) at Stanford University. Both thrusters form plasma with a radiofrequency
discharge in an axial magnetic field specifically to develop a helicon wave within
the plasmathis has been shown to efficiently produce high-density, low-
pressure plasma. CAT then accelerates the plasma out of a magnetic nozzle via
an ambipolar electric field. CAT is predicted to produce 1 mN thrust at 2000 sec
Isp while consuming 10 W of power. mH2T further heats the electrons after
ionization before accelerating the plasma similarly out of a magnetic nozzle.
This is predicted to produce 1.5 mN thrust at 3000 sec Isp while consuming 50 W
power.
Figure 20: CubeSat Ambipolar Thruster (Longmier, 2013).
39
3.3 Solar Sails
Solar sails offer a propellant-less option for satellites by harnessing momentum
of the solar flux with reflective sails. This is an attractive alternative that also
complies with the CubeSat standard prohibiting the use of high pressure storage
tanks. University of Surrey in the United Kingdom is developing a 3 kg solar sail
CubeSat called CubeSail (Figure 21), with a sail surface area of 5 m x 5 m.
Figure 21: Engineering and CAD models of CubeSail (Lappas et al. 2011).
Table 9 shows a summary of the small satellite propulsion technologies listed
above. Although this subsection has focused primarily on CubeSat technologies,
similar technologies are being developed globally for 50-180 kg class small
spacecraft. One such mission is NASAs Sunjammer solar sail. The 180 kg sail
module is scheduled for launch in 2015. This mission builds on the NanoSail-D2
demonstration on a 3U CubeSat.
40
Table 9: List of small satellite propulsion technologies.
Technology
Name
Description Developer TRL Status Figures
MPACS
Pulsed plasma
thruster flown on
FalconSat-3
Busek Corp
(USA)
9
Flight tested
Miniature
hydrogen
peroxide
thruster
Green
monopropellant
thruster using
hydrogen peroxide
ARCS
(Austria)
4
Component laboratory
testing
Hydros thruster
Oxygen and hydrogen
bipropellant chemical
thruster, propellant
stored as water
Tethers
Unlimited
(USA)
4
Component laboratory
testing
JPL hydrazine
milli-newton
thruster
Hydrazine
monopropellant
thruster
JPL
(USA)
3
Proof of concept,
laboratory development
Vacuum arc
thruster
Pulsed plasma
thruster that erodes
its cathode via an arc
to produce propellant
JPL
(USA)
4
Component laboratory
testing
Cylindrical hall
thruster
Miniature Hall effect
thruster using a
cylindrical (instead of
anular) geometry
Princeton
(USA)
4
Component laboratory
testing
Miniature
xenon ion
thruster
RF discharge gridded
ion thruster
JPL
(USA)
3
Proof of concept,
laboratory development
PUC
electrospray
thruster
Electrostatically
accelerates charged
liquid particles from
an ionic liquid
Busek Corp.
(USA)
5
Subsystem laboratory
testing
CAT
Thruster with a
helicon plasma
discharge accelerated
out of a magnetic
nozzle
University
of Michigan
(USA)
3
Proof of concept,
laboratory development
mH2T
Thruster with a
helicon plasma
discharge with
electron heating stage
and magnetic nozzle
Stanford
University
(USA)
2
Technology concept
and application
formulated
CubeSail
25 square meter
CubeSat solar sail
University
of Surrey
(UK)
3
Proof of concept,
laboratory development
5
Schedule for launch
2015
Sunjammer
1200 square meter
Kapton solar sail
module
NASA L'Garde
(USA)
41
4. Conclusion
Small spacecraft propulsion is a slightly primitive, but rapidly growing
technology field. The SoA in this field consists of cold gas thrusters, solid rocket
motors, and pulsed plasma thrusters. There are upcoming demonstrations in
green monopropellant systems. The future of propulsion technology is diverse
with both chemical and electric propulsion options on track to mature within the
next five years. A summary of the performance of these technologies is detailed
graphically below in Figure 22.
Figure 22: Plot detailing the spectrum of small satellite propulsion options.
5. References
B. W. Longmier: PEPL Thrusters: CubeSat Ambipolar Thruster. May 2013.
Busek Co, Inc.: Busek Electrospray. [Online], 2013. Available at:
http://www.busek.com/technologies__espray.htm [Accessed August 2013].
CubeSat Design Specification (CDS). Revision 13, California Polytechnic State
University, San Luis Obispo, CA, April 2013.
42
CubeSat Technology: Current SoA and Future Needs. Jet Propulsion Laboratory
Hruby, Vlad, Busek Corp.: High Isp CubeSat Propulsion. iCubeSat Conference at
MIT, 2012.
Lappas, Vaios, et al.: CubeSail: A low cost CubeSat based solar sail demonstration
mission. Advances in Space Research 48.11, 1890-1901, 2011.
Mueller, Juergen, et al.: A survey of micro-thrust propulsion options for
microspacecraft and formation flying missions. 5th Annual CubeSat Developers
Workshop. San Luis Obispo, CA, 2008.
Mueller, Juergen, Richard Hofer, and John Ziemer: Survey of propulsion
technologies applicable to CubeSats. 2010.
Tethers Unlimited, Inc.: Hydros, Powerful Propulsion and Precision Pointing for
CubeSats. [Online] 2013. Available at: http://www.tethers.com
http://pepl.engin.umich.edu/thrusters/CAT.html
43
V. ATTITUDE DETERMINATION AND CONTROL
SYSTEM
1. Introduction
The SoA of ADCS for small spacecraft relies on miniaturizing technology without
significant degradation of performance. Despite the fact that ADCS algorithms
used on small spacecraft are essentially the same as those flown on conventional
spacecraft, small spacecraft are good platforms to test new algorithms and
advanced software. Benefits of using small spacecraft include low cost and rapid
development; research to decrease the development cost of ADCS software is
addressed below.
2. State of the Art
2.1 ADCS Technology
2.1.1 Reaction Wheels
The performance of reaction wheels is described by maximum angular
momentum, maximum output torque, electrical power, and the level of micro-
vibrations produced by the wheels. Current research focuses on increasing
angular momentum and maximum output torque, and decreasing electrical
power and micro-vibrations. For CubeSats, which may not have sufficient volume
to accommodate three independent wheels, integrated three-axis wheel systems
are considered a SoA option
4
.
Wheel performance, in terms of maximum angular momentum and output
torque, is proportional to wheel volume (Larson & Wertz, 2004). One convenient
way of describing the SoA of wheels is by mapping the ratio of maximum angular
4
Traditionally CubeSats did not require precise attitude stability and micro-vibrations have not
been considered problematic for these spacecraft, but recent CubeSat missions require more
precise observations, and thus recent miniature wheel research focuses both on improved pointing,
and on being able to deal with micro-vibrations.
44
momentum to volume against the mass of the wheel, as depicted in Figure 23.
The Figure gives an overview of the current SoA techniques by comparing a
number of benchmark wheels presented in detail in Table 10.
Figure 23: SoA for small spacecraft ADCS wheels. The performance of nine wheels, expressed
through the ratio of maximum angular momentum to volume, is plotted against mass. The orange
dashed line separates SoA technologies from those still under development. The data used to
draw the graph is given in Table 10.
1000 200 0
Maximum Angular Momentum / Volume [Nms/mm^3]
Mass[g]
1000
100
10
!"# % &
'() *+,,-.
/!"# 0 12
400 600 800
45
Table10: Examples of SoA wheel technology for small spacecraft.
Technology
Description Developer TRL Status Figures
Name
SoA single axis wheel
for minisatellite
9
(Max AM = 1500 SSTL
100SP-O TechDemoSat-1
mNms, (UK)
Kazakhstan
Max torque =110
mNm)
9
SoA single axis wheel UK-DMC-2,
for microsatellite SSTL Deimos-1,
10SP-M
(Max AM = 420 mNms, (UK) NigeriaSat-2,
Max torque =11 mNm) & ExactView-1
SoA single axis wheel
Astro- und
for microsatellite 8
RW90 Feinwerktechnik
(Max AM = 340 mNms, BIRD, TET-1
(Germany)
Max torque =15 mNm)
SoA single axis wheel
8
for nanosatellite Sinclair
RW-0.03-4 UniBRITE
(Max AM = 30 mNms, Interplanetary
BRITE-Austria
Max torque =2 mNm)
SoA three axis
integrated miniature
wheel for cubesat Maryland 7
MAI-200
(Max AM = 10.8 mNms, Aerospace QbX1, QbX2
Max torque =0.63
mNm)
SoA single axis
miniature wheel for
Astro- und
cubesat 7
RW1 Feinwerktechnik
(Max AM = 0.6 mNms, BEESAT
(Germany)
Max torque =0.02
mNm)
2.1.2 Magnetorquer
The purpose of magnetorquers is to develop a magnetic field that interfaces with
Earths magnetic field so that the counter-forces produced provide useful torque.
46
Whereas large spacecraft usually do not rely on magnetorquers (their size would
be prohibitive), magnetorquers for small spacecraft are built around two types of
technology: air core coils and metal core coils (also known as torque rods). The
performance of metal core coil magnetorquers depends on the material used:
materials with high magnetic permeability allow higher magnetic moment; mini-
and micro satellites are adapted to having a redundant coil inside their
magnetorquer in case of contingency. Table 11 gives an overview of some SoA
technology for magnetorquers.
Table 11: Examples of the SoA of magnetorquer technology for small spacecraft.
Technology
Name
Description Developer TRL Status Figures
The most popular
Magnetorquer
magnetorquer for
micro satellites to
mini satellites
(with/without
ZARM
(Germany)
9
Numerous flight
demonstrations
redundancy)
The most popular
Magnetorquer
magnetorquer for
pico satellites to nano
satellites
(with/without
ZARM
(Germany)
9
Numerous flight
demonstrations
redundancy)
SSBV
Aerospace
&
Technology
Group
(UK)
9
Flight heritage on the
BADR
!
B, Fedsat and
MicroLabSat
Magnetorquer
rod
Magnetorquer with
redundancy
2.1.3 Other Actuators
For active, high-agility missions such as side-looking slew maneuvers in Earth
observation, gamma ray burst observation, or observation of asteroid fly-bys,
higher output torque actuators are required. In these cases, Control Moment
Gyros (CMGs) are usually the technology of choice.
47
Technologies for passive attitude stabilization using the ambient space
environment include aerodynamic wing technologies (taking advantage of
atmospheric drag), gravity gradient stabilization, and permanent magnets for
magnetic field aligned control.
These technologies are mostly used with active control actuators or rate dampers
(see Table 12).
Table 12: Examples of the SoA of other actuators for small spacecraft.
Technology
Description Developer TRL Status Figures
Name
CMG used in SSTL's SSTL 8
CMG
satellites (UK) Flown on BILSAT-1
Aerodynamic Pumpkins Colony I Pumpkin 7
wing CubeSat Bus (USA) Flown on QbX
2.1.4 Star Trackers
Currently, star trackers are the most important attitude sensor for small
spacecraft. The performance of star trackers is measured by accuracy, data
output rate, first tracking time, and maximum allowable slew rate (attitude
maneuver rate). The accuracy of a star tracker is proportional to the size of its
field of view. Figure 24 maps the in-plane accuracy of a number of benchmark
star trackers against their mass and power requirements. A subset of the data
used is given in Table 13.
48
Figure 24: SoA of small spacecraft star trackers. The performance of eight star trackers, expressed
through the accuracy achievable, is plotted against mass and power requirements. The blue
surface highlights the SoA technology at TRL > 7, and the red surface highlights technology at TRL
lower or equal to 6. A subset of the data used to draw the graph is given in Table 13.
Table 13: Examples of SoA star trackers for small spacecraft.
Mass[g]
Accuracy [deg]
!"""
!""
!"
"#""! "#"!
!"#$%#&'
!"&((
)*+,-.#/01
2"3 !""
5!"#6$7
!" !"" !
58#!"
Accuracy [arcsec]
$%& ( )
*+, *$$
-$%& . /0
!"9::)
Power[W]
!"
!
"#!
0;" <,=>
Technology
Name
Description Developer TRL Status Figures
ASC (Micro
Advanced
Stellar
Compass)
World's highest
accuracy star tracker
for mini satellites
(accuracy=1 arcsec)
Technical
University
of
Denmark
(DTU)
9
Proba series, Myriade
series
Miniature star tracker
for micro satellites
(accuracy=18 arcsec)
VECTRONIC
Aerospace
(Germany)
9
TUBSAT series, SDS
series
VST-41M
49
2.1.5 Sun Sensors
There are two types of Sun sensors for small spacecraft: fine- or medium-
precision Sun sensors and coarse Sun sensors. Traditionally, fine-precision Sun
sensors have combined two orthogonally arranged solar cells with narrow slits
over the cells, and measured the analog current from the cells to detect the
direction of the Sun. More recently, fine-precision sensors use two line array
sensors or an area sensor to obtain a digital value for the Suns direction. Coarse
Sun sensors basically consist of a solar cell or a photo diode. Currently the most
advanced Sun sensor technology for small spacecraft is the SS-411 from Sinclair
Interplanetary, as shown in Table 14.
Technology
Name
Description Developer TRL Status Figures
SS-411 Digital
Sun Sensor
World's best seller
micro DSS
(accuracy=0.1!)
Sinclair
Interplanetary
(Canada)
9
!DSS
2-D APS (Active Pixel
Sensor) detector array
DSS
(accuracy=0.1!)
TNO
(Netherlands)
7
PROBA-2, Delfi-
n3Xt(2013)
Table 14: Examples of SoA fine-precision Sun sensors.
2.1.6 Earth Sensors
Most recent miniature Earth sensors use thermopile sensors or photodiodes to
locate the curve of the Earth without the use of scanning mechanisms. Since the
temperature of the Earths contour differs significantly between polar regions
and the equator, a set of thermopile arrays measures both the temperature of the
limb of the Earth and space, and a CPU calculates the difference to determine the
displacement from nadir. The process is illustrated in Figure 25, with an example
of current TRL in Table 15.
50
Figure 25: The use of thermopiles to detect the limb of the Earth has enabled Earth sensors to be
miniaturized.
Table 15: An Example of a SoA Earth sensor for small spacecraft.
Technology
Name
Description Developer TRL Status Figures
Earth nadir
sensor
SoA miniature
European Space
Agency for cubesat
Aerospace
(USA)
7
PSSCT-2
2.1.7 Angular Rate Sensors
Gyroscopes can be ranked as follows, in decreasing order of precision and
system resource requirements: mechanical and ring laser gyroscopes, fiber
optical gyroscopes, and MEMS vibrating structure gyroscopes. Microsatellites
tend to use fiber optical gyroscopes, while nano- and picosatellites generally use
MEMS-based gyroscopes. The precision of gyroscopes is measured by bias
instability and angle random walk. Figure 26 shows an overview of the SoA
gyroscopic technology available to small spacecraft by mapping system resource
requirements against precision. Note that the values for power and mass need to
be multiplied by three if the angular rate is required to be measured along the
three axes of the spacecraft. Some of the raw data used in Figure 26 is specified
in Table 16.
51
Figure 26: SoA of gyroscopic technology for small spacecraft. System resource requirements are
mapped against precision.
Table 16: Examples of SoA gyroscopes for small spacecraft.
Mechanical, Ring Laser Gyro
Fiber Optical Gyro
MEMS Gyro
15 150 1500 1.5 0.15 0.015 0.0015 0.00015
Bias Instability [deg/s]
Mass[g]
1000
100
10
1
0.1
Power[W]
10
1
0.1
0.01
!"# % &
'() *+*' ,-.(/
0!"# 1 23
Technology
Name
Description Developer TRL Status Figures
!FORCE-1
Single axis fiber
optical gyro
for mini satellites
(BI=1deg/h)
Northrop
Grumman
LITEF GmbH
(USA/
Germany)
9
VSGA
3-axis MEMS gyro
using CRS09 for
mincrosatellites
(BI=3deg/h)
AES
(Japan)
7
Flown on SDS-4
ADIS16405BLM
Triaxial inertial sensor
with magnetometer
for nano and pico
satellites
(BI=25.2deg/h)
Analog
Devices
(USA)
8
52
2.1.8 GPS Receivers and Antennas
GPS receivers are used not only for orbit control but also for ADCS purposes, in
particular to determine of the direction of a ground target. The best way to make
GPS receivers smaller is to develop high-end Application Specific Integrated
Circuits (ASIC). Examples of these current technologies are listed in Table 17. In
order to use COTS GPS receivers in space, the Doppler frequency range and the
ionospheric delay correction must be modified accordingly. To do so, developers
must have access to the firmware of the receiver.
Table 17: Example SoA GPS receivers for small spacecraft.
Technology
Name
Description Developer TRL Status Figures
SGR-10
Higher-end GPS receiver
(L1, 2 antennas,24ch,
10m)
SSTL
(UK)
9
Flown on NigeriaSat-2
GPS-12-V1
GPS receiver
(L1, 1 antenna,12ch,
10m)
SpaceQuest
(USA)
9
Flown on AprizeSat-1,-2
SGR-05P
Miniature GPS receiver
(L1, 1 antenna,12ch,
10m)
SSTL
(UK)
8
Flown on UKDMC
Phoenix-S
Miniature and higher
performance GPSR
with Kalman filter
inside
(L1,1antenna,12ch, 10m)
DLR
(Germany)
9
Flown onPROBA-2, X-Sat,
PRISMA, FLP, & ARGO
7
Flown on CanX-2 &
CASSIOPE
OEM4-G2L
Dual frequency GPSR
(L1/L2,1antenna,12+12c
h, 1.5m)
NOVATEL
(Canada)
53
3. On the Horizon
3.1 ADCS Technology
3.1.1 Reaction Wheels
Table 18 presents a number of wheel technologies currently under development.
Table 18: On the horizon technologies for small spacecraft wheels.
Technology
Name
Description Developer TRL Status Figures
Type SSS
Single axis wheel for
microsatellite
(Max AM=400mNms,
Max AM/V = 1102
Nms/m^3)
Mitubishi
Precision
(Japan)
6
Not flown yet
RW-0.060
Single axis wheel for
nanosatellite
(Max AM=60mNms,
Max AM/V = 324
Nms/m^3)
Sinclair
Interplanetary
(Canada)
6
Not flown yet
6
Not flown yet
Micro reaction
wheel
Single axis miniature
wheel for cubesat
(Max AM=18mNms,
Max AM/V = 541
Nms/m^3)
Blue Canyon
Technologies
(USA)
3.1.2 Magnetorquer
Three-axis integrated magnetorquer systems for nano- and picosatellites are in
development, as shown in Table 19.
54
Technology
Name
Description Developer TRL Status Figures
Delft
University
(Netherlands)
TU Delft MTQ
Sytem
Three axis integrated
magnetorquer system
5
DELFI-N3XT
5
Not flown yet
The ISIS
MagneTorQuer (iMTQ)
is a PCB based 3-axis
magnetorquer system
ISIS
Magnetorquer
ISIS
(Netherlands)
Table 19: Examples of future magnetorquer technology for small spacecraft.
3.1.3 Other Actuators
Research focuses on CMGs and aerodynamic wings for CubeSats. For missions
beyond-GEO and near-Earth environment, magnetorquers such as thrusters and
electrochromic vanes for solar pressure control cannot be used. However, all are
promising technologies as shown in Table 20.
Table 20: Examples of future technologies for other actuators for small spacecraft.
Technology
Name
Description Developer TRL Status Figures
CMG
CMG for
microsatellite
Tamagawa
Seiki
(Japan)
6
Demonstrated on
TSUBAME
Electrochromic
vanes for solar
pressure
control
Electrochromic vanes
for solar pressure
control
JPL
(USA)
4
55
3.1.4 Star Trackers
Areas of research include fast and effective star identification algorithms, and
low-reflection small (or deployable) baffles, as shown in Table 21.
Table 21: On the horizon technologies of star trackers for small spacecraft.
Technology
Name
Description Developer TRL Status Figures
BCT Nano
Tracker
CubeSat compatible
star tracker with
digital interface drive
electronics
(accuracy=6 arcsec)
Blue Canyon
Technologies
(BCT)
(USA)
6
To be flown on JPL's
INSPIRE 3U CubeSat,
planned for launch 2014-
2016
ST-16 Star
Tracker
Miniature star tracker
(accuracy=7 arcsec)
Sinclair
Interplanetary
(Canada)
6
17 Flight units
delivered. First launch
Q4 2013
The ST-200 is one of
the worlds smallest
autonomous star
trackers for CubeSats
and other nano
satellite missions
(accuracy=30 arcsec)
Berlin Space
Technologies
(BST)
(Germany)
Star Tracker ST-
200 Not
5
flown yet
The ST-100 is a low-
cost star tracker for
micro and nano
satellites which allows
tracking of magnitude
6 stars with an update
rate of 5Hz
(accuracy=30 arcsec)
Star Tracker ST-
100
Berlin Space
Technologies
(BST)
(Germany)
6
Flying on LAPAN-A2 and
LAPAN-ORARI
microsatellites,
launching mid-2013
3.1.5 Sun Sensors
Research is ongoing as can be noted from Table 22.
Table 22: On the horizon fine Sun sensor technology for small spacecraft.
Technology
Name
Description Developer TRL Status Figures
SSBV
Aerospace &
Technology
Group
(Netherlands/
UK)
6
To be flown on Ukube-1
and TechDemoSat-1
(a.k.a. TDS-1), both of
which are launching in
Sep. 2013
Miniature
CubeSat Sun
Sensor
Fine sun sensor for
cubesats
56
3.1.6 Earth Sensors
Table 23 shows an example of an Earth sensor for small spacecraft currently
under development.
Table 23: Example of an Earth sensor for small spacecraft under development.
Technology
Name
Description Developer TRL Status
6
Not flown yet
(planned in 2013 on
SOCRATES)
Figures
MESA
Wide FOV ESA for
nanosatellite
Meisei
Electric
(Japan)
3.1.7 Angular Rate Sensors
Recent R&D has enabled MEMS gyros to be on par with fiber optic solutions in
terms of precision. As shown in Table 24, a number of microsatellites have
already adopted MEMS gyros. MEMS gyros are small, lightweight, low power, and
fit the needs of small spacecraft.
Table 24: Examples of gyroscopes under development for small spacecraft.
Technology
Name
Description Developer TRL Status Figures
STIM300
3-axis MEMS gyro
(BI=0.5!/h)
Sensonor
(Norway)
5
Not flown yet
CRS39
Single axis MEMS gyro
(BI=0.2!/h)
Silicon
sensing
(UK)
5
Not flown yet
5
Not flown yet
SAR500
Single axis MEMS gyro
(BI=0.02!/h)
Sensonor
(Norway)
57
3.1.8 GPS Receivers
Current research areas that look to be advantageous are: multi-antenna inputs,
multi-Global Navigation Spacecraft Systems (GNSS) decoders, L1/L2 dual-
frequencies, internal Kalman filtering (only very few GPS receivers for small
spacecraft currently have an internal Kalman filter), GPS constellation spacecraft
initial acquisition & search algorithms, precise positioning using carrier-wave
phase information, and open source software GPS receivers. An example of this
is the FOTON subsystem under development by University of Texas, Austin (as
shown in Table 25).
Table 25: Example of a GPS receiver under development for small spacecraft.
Technology
Name
Description Developer TRL Status Figures
Dual frequency, open
source GPSR with
Kalman filter inside
(L1/L2,2
antennas,12+12ch,
1.5m)
University
of Texas
Austin
(USA)
FOTON 6
Table 25A: ADCS accuracies achievable for mini-, micro-, nano- and picosatellites. The overall
accuracy is the root mean squared value of the three preceding values.
Attitude
Determination
Ground Target
Position
Attitude
Control
Overall
Accuracy
Mini/Microsatellites
Nano/Picosatellites
~0.1 ~0.8 ~1.8 ~2
~0.01 ~0.01 ~0.04 ~0.1
3.1.9 Reaction Control System Thrusters
No small spacecraft in LEO have used RCS thrusters in past missions. Currently,
there are only limited efforts going in this direction. An example of a current
project is the STRaND-2 mission by SSTL developing a cold gas thruster based
RCS for nanosatellite rendezvous and docking. A large number of thrusters have
been developed for small spacecraft but all of these systems have been built for
58
the purpose of orbit correction and not for attitude control. The reasons for this
lack of development are the limitations in size, mass and power of small
spacecraft. In LEO, magnetorquers are typically used to unload angular
momentum and no RCS thrusters are necessary.
The situation changes for interplanetary missions beyond Earth orbit.
Magnetorquers cannot be used any more since Earths magnetic field is not
available to provide the torque. There is a need to develop RCS thrusters for
interplanetary missions. Cold gas thrusters are the most likely candidate
technology since chemical thrusters are too complex to mount on small
platforms. Electric thrusters are not a likely option either since the net thrust
force of such systems is not sufficient for RCS purposes. Electric systems also
require significant power that is usually not available for typical small spacecraft.
4. Conclusion
Pointing accuracy depends on attitude determination error, ground target error,
and attitude control error. Errors can furthermore be categorized into random
errors, bias (offset) errors, and transitional errors. Figure 27 gives an overview of
the SoA of pointing accuracy technology for small spacecraft. Most mini- and
microsatellites are Earth orbiting spacecraft and the attitude control requirement
is typically 0.1# (see Table 26).
59
!"!#
!"#
#
#!
#!!
!
"
#
$
%
#
$
&
(
)
)
*
+
(
)
,
-
.
/
&
0
#!!(#'!)* #!(#!!)* (#!)*
23%+"$"4,
5/)"$$(#33($)/
6(+%7 3)#/$)/
58 9 :"44*$#)(%#"$
++,-(#.! ++,-(#.!
++,-(#!!
/010
2345678
2345678
2345678
9-:
++,-
,;<
0=>4?$!! 0=>4?$!!
@4?A6
@4?A6
@4?A6
++,-(#!!
B6C(1$
DA1
/010
2E,
,;98FG>
B1<H
+5IJ
2345678
K6FI?C=6>
!"!!#
$!!! $!!$ $!!% $!!& $!!' $!#! $!#$ $!#%
1/(+
Figure 27: Pointing accuracy of spacecraft below 180 kg as a function of time. The two arrows
depict the trend through the last decade for mini/microsatellites and nano/picosatellites. The SoA
is 0.1E for mini/micro and 2E for nano/pico, respectively. The requirement for typical small
spacecraft EO missions is on the order of 0.1E. Higher accuracy below 0.1E can be achieved using a
mission related sensor (i.e., a payload instrument) in the attitude control loop. CubeSats are part
of the nano- and picosat category. Their pointing accuracy has improved rapidly thanks to
miniaturized ADCS components. The data used to plot the graph is shown in Table 26.
60
Table 26: Examples of the SoAs for small spacecraft with improved pointing accuracy.
Technology
Name
Description Developer TRL Status Figures
SSTL150 bus
ADCS system level
SoA for 150-180 kg
satellites
(Pointing accuracy =
0.1!)
SSTL
(UK)
9
Flown on Beijing-1 &
RapidEye
Astro200 bus
ADCS system level
SoA for 150-180 kg
satellites
(Pointing accuracy =
0.1!)
Comtech
AeroAstro
(USA)
9
Flown on STPSat-1 &
STPSat-2
Myriade bus
(Astrosat-100)
ADCS system level
SoA for 150-180 kg
satellites
(Pointing accuracy =
0.1!)
CNES /
Astrium
(France)
9
Flown on Parasol,
Demeter & Picard
Proba bus
ADCS system level
SoA for 100-150 kg
satellites
(pointing accuracy =
0.02)
ESA /
QinetiQ
(UK)
9
Flown on PROBA-2 &
PROBA-V
SSTL100 bus
ADCS system level
SoA for 50-100 kg
satellites
(pointing accuracy =
0.5)
SSTL
(UK)
9
Flown on Alsat &
NigeriaSat-X
SDS bus
ADCS system level
SoA for 10-50 kg
satellites
(pointing accuracy =
0.5)
JAXA
(Japan)
8
Flown on SDS-4
Cubesat bus
ADCS system level
SoA for less than
10kg satellites
(pointing accuracy =
2.0!)
Morehead
State
University
(USA)
7
Flown on CXBN
61
Table 27 shows design approaches for achieving higher pointing accuracy. Most
of the current research in ADCS can be related to the steps denoted. The SoA
design level for nano- and picosatellites deals mostly with Steps 1 to 3 and is
highlighted in italics. The development of miniature star trackers and miniature
wheels is especially important. For micro- and minisatellites, the design level can
go up to Step 14. End-to-end in-orbit calibrations and systematic micro-vibration
management are an area of importance here.
Table 27: Design strategies and approaches in order to achieve higher pointing accuracy for small
spacecraft. The steps highlighted in italics show the current SoA for nano- and picosatellites
(including CubeSats). The ADCS of mini- and microsatellites can be refined to include all the
design steps presented.
1. Apply 3-axis control architecture.
2. Use high accuracy sensors like star trackers.
3. Apply filtering (e.g. Kalman filter) to eliminate random errors and to
estimate bias errors in the attitude determination software.
Basic
4. Apply transitional error calibration e.g., temperature compensation.
5. Use a mission related sensor (a payload instrument) in the control
loop for end-to-end feedback.
6. Conduct an alignment test on ground to calibrate misalignments
between ADCS and mission related sensors.
7. Apply 3-axis zero momentum control architecture.
8. Use low micro-vibration wheels, and apply dumping materials to the
structure.
9. Design structure and components layout for higher moment of
inertia for the same size and mass.
10. Use actuators with a better input frequency response.
11. Use higher performance onboard computer to increase control
frequency.
Advanced
12. Flexible structure analysis and design.
13. Apply in-orbit calibration and parameter modification in the attitude
control software.
14. Apply highly autonomous fault detection, isolation and
reconfiguration software for operational safety.
62
There are two main ways to address ADCS software development: model-based
development and open-architecture development.
In the case of model-based development the ADCS flight software uses an
overarching model from conceptual design to system level test. At conceptual
design level, the Matlab and Simulink tools are usually used to model the ADCS.
The same model, with partial refinements, is then used in the preliminary and
critical design phases (where C++ flight code can be generated from Matlab).
Even during final ADCS flight software testing, the model is used to simulate
attitude dynamics and to create test cases. Some merits of applying model-based
development are overall consistency between design phases, cost savings
achieved with a decrease in labor, and rapid development cycles. Proba-V (ESA),
Myriade (CNES, EADS) and LADEE (NASA ARC) ADCS are examples of current
software development projects using model-based development.
Open-architecture development relies on a different philosophy to address
ADCS software development. This environment enables multi-national and multi-
institutional projects: anybody can join and contribute to the development of
ADCS software modules. The development of proprietary code is avoided. This is
often the option of choice for ADCS software developed in an academic setting.
The SoA for small spacecraft ADCS subsystems is based on miniaturizing
existing technology without performance degradation. Miniaturizations are
achieved for many technologies. Examples include:
new imaging devices such as the high resolution CMOS image sensor for
star trackers, and thermopile sensor for Earth sensors;
new materials to increase the moment of inertia of wheels, and new
materials to decrease reflections inside the baffle of star trackers;
new configurations to miniaturize fine-precision Sun sensors, and Earth
sensors;
new algorithms to increase the accuracy of GPS receivers, and star
trackers; and
new peripheral circuits to increase the accuracy of MEMS gyros.
63
5. References
Arnold, S., et. al.: QbX - The CubeSat Experiment. SSC12-XI-4.
Kyohei A., et. al.: High-Speed Attitude Control System for Small Spacecraft with
Micro-CMGs. 27th International Symposium on Space Technology and Science
(ISTS), Tsukuba, July 5-10, 2009-d-23, 2009.
Lappas, V., et. al.: Micro CMGs for Agile Small Spacecraft: Design and In-Orbit
Tests. Proceedings of the 6th International ESA Conference on Guidance,
Navigation and Control Systems. Loutraki, Greece, Oct. 17-20, 2005.
Larson, W. J., Wertz, J. R.: Space Mission Analysis and Design. Microcosm Press,
3rd ed. El Segundo, CA, 2004.
64
VI. STRUCTURES, MATERIALS & MECHANISMS
1. Introduction
The structure is what holds the different components of the spacecraft together
and provides the necessary interfaces for each subsystem. The selection of the
structure depends on the accommodation of the payload devices and circuitry,
material properties, stability, and protection reliability. The structure should
dually minimize the complexity of the design and minimize the cost. In addition,
it must support significant loads encountered during launch while still providing
an easily accessible power and data bus.
Different materials can be used for the construction of the main frame, providing
desirable protection against radiation as well as taking into account the
temperature gradients and the vacuum conditions in space. Mechanisms and
actuators are a key component to guarantee the functionality of various
subsystems (a prominent example is power and the related deployment of solar
panels).
2. State of the Art
2.1 Structures
Structures have to meet various needs such as stiffness, stability, low mass, low
price, ease of manufacture, and ability to support deployable mechanisms. The
primary frame can be machined out of a single block of material, or it can be
assembled from separate parts. There is no consensus on the typical structure
mass for small spacecraft as many different configurations were represented.
The assembly techniques differ greatly, however, and use screws to fasten
separate pieces together still seems to be the most common technique. Computer
Numerical Controller (CNC) techniques are very efficient since they minimize
material losses and internal stresses during fabrication. Spacecraft developers
can purchase prefabricated structures or make their own custom designs.
SSTL, Pumpkin, and Incorporated and Innovative Solutions in Space (ISIS) are the
most popular commercial vendors of CubeSat structures. Pumpkins designs
65
range from 0.5 to 3 U and are based on precision sheet-metal fabrication. They
are made of 5052-H32 aluminum sheet metal that is hard anodized and alodined
in order to comply with CubeSat guidelines. An advanced version is fabricated
from 7075-T6 billet aluminum and is one of the lightest and strongest structures
available due to the ability to resist both compression and twist forces.
The CubeSat frame was proposed in 1999 at CalPoly and Stanford University. The
typical dimensions for a 1U unit are shown in Figure 28 (CalPoly, 2013).
!
!
!
!
!
Figure 28: CubeSat specifications (CalPoly, 2013).
ISIS CubeSat structures comply with CubeSat standards. Avionics and payload
modules are mounted onto the primary load-carrying components. The package
includes the following components:
Primary Structure:
2x side frames, black hard anodised
Ribs, blank alodined
2x kill-switch mechanisms
Supplied with inserted phosphor bronze helicoils
Fasteners
66
Secondary Structure:
! 6x aluminum shear panels, blank alodined
M3 threaded rods, M3 hex nuts, M3 bus spacers
Boards are supported using M3 washers
!
!
2.2 Custom Designs
Several institutions and universities have created their own spacecraft designs
(NASA 3U designs). SwissCube, launched in 2009, was a project undertaken in
Switzerland that machined an entire block of aluminum by adapting the wire
electrical discharge machining (EDM) method. This technique consists of a fast
series of single electrical discharges that make precision shapes without
exceeding cutting tool pressure. As a result, SwissCube had a structure of just 95
g of mass, one of the lightest frames ever produced.
2.3 Materials
Materials have to be lightweight and conduct electricity, since radiation can
induce potential charge accumulation in the satellite electronics. Various
conductive lightweight metals are the most commonly used materials for small
spacecraft structures.
The California Polytechnic State University, San Luis Obispo (CalPoly) writes a
yearly report with updated basic standards for CubeSat design and integration.
In their latest release (CalPoly, 2009), they establish general rules governing
materials:
No hazardous material shall be used in a CubeSat.
All CubeSats should comply with the following requirements regarding
outgassing:
o Total mass loss shall be less than 0.1%.
Collected Volatile Condensable Material shall be less than 0.1%. o
2.3.1 Aluminum
Aluminum is the most common material of choice in most recent small satellite
missions. Aluminum offers reliability and lightweight support at low cost. It is
67
thermally and electrically conductive, chemically resistant and non-sparking. In
terms of strength, aluminum is equal to that of other metals if reinforced at low
temperatures (Univ. of Texas, 2003). Table 28 and
Table 29 show the characteristics of a few examples of different aluminum alloys
used in previous satellite missions.
Table 28: Aluminum structures used in recent missions.
Mission Materials Launch Date
EST-1
Aluminum AW 6061-T6
and AW 7075
2013
Aluminum (AA2024-
PROBA V T3) and Aluminum 2013
(AA7075-T7351
e-St@r Aluminun 5005 H16 2012
Techedsat Aluminum 6061 2012
Hermes Aluminum 7075-T73 2011
Table 29: Properties of aluminum types.
Aluminum
Type
Density
(g/cm^3)
Modulus of
Elasticity
(Gpa)
Fatigue
Strength
(MPa)
Ultimate
Tensile
Strength
(MPa)
Thermal
Conductivity
(W/m!K)
Electrical
Resistance
(ohms!cm)
2024-T3 2.78 73.1 138 483 121 5.82E-06
7075-T73xx 2.81 72 150 505 155 4.30E-06
5005 H16 2.7 69 N/A 180 205 N/A
6061 2.7 68.9 62.1 124 180 3.66E-06
2.3.2 Other Metals
Titanium has several positive traits, such as resistance to corrosion, a low
thermal expansion coefficient, and high durability. However, it is very difficult to
machine and is about 60% heavier than aluminum.
Steel offers a very low stiffness to density ratio and a large range of strength and
ductility. It is also extremely heavy, even more than titanium.
Beryllium has appeared as a viable option due to its high stiffness to weight ratio
and high thermal conductivity. It is lighter than aluminum but much more brittle,
68
which in turn makes it very expensive and time-consuming to machine. In
addition, particles are toxic, driving manufacturing costs even higher.
2.3.3 Composites
Composite materials are made of two or more materials with different physical
and chemical properties. The main advantage of composites is that they can be
designed for the necessities of the mission. Composites are usually made from a
matrix material and a reinforcement material. The material used for the matrix is
usually a cured resin, and it supports the reinforcement materialsusually
carbon fiber. Cyanate resin exhibits very convenient performance characteristics
for space applications due to low moisture absorption, low microcracking and
low outgassing (Ozaki, 2008). Composites are anisotropic; hence the properties
are beneficially different in each part of the material, depending on the direction
of the loads. However one potential problem is that shock forces can separate
the laminates between layers. Due to various potential outcomes, manufacturing
is expensive and time consuming.
Small spacecraft manufacturers are employing composite structures with more
frequency. For example, SSTL is developing a series of low-cost, multifunctional,
high-performance, lightweight composite structures of TRL 6 or more. They are
made from a cyanate-ester and
epoxy based polymer resin with
various fiber reinforcements (see
Figure 29). Another example is
the NASA ARC Common Bus that
has been used for the recent
LADEE mission.
Figure 29: SSTL Composite Structure.
69
2.3.4 Additive Manufacturing Materials
Additive manufacturing is a layer-by-layer process that uses CAD data to create a
3D object. Current capabilities using additive manufacturing are:
High strength build materials of nylon/carbon fiber or titanium
Fully fused construction, which allows for high pressure vessels
Internal cavities
Additive manufacturing does have certain limitations:
Inadequate material strengths
Porous construction, which can lead to outgassing
Non-functional parts/used for fit checks
Additive manufacturing is recently being used for prototype-building due to
flexibility in 3D printing technology. Figure 30 shows a list of some of the most
common materials used in additive manufacturing of small spacecraft
components.
Figure 30: List of materials for additive manufacturing (SINTech, 2013).
2.3.5 Windform Materials
CRP Technology, an Italian-based group, is specialized in Laser Sintering (LS)
technology and is well known for their additive manufacturing materials line
70
called Windform XT. Windform XT is a carbon fiber-reinforced composite
material, of which the properties are shown in
Table 30 and a visual representation can be seen in Figure 31.
Table 30: Properties of Windform XT 2.0.
Material
Density
(g/cm^3)
Elongation
at Break
Tensile
Modulus
(MPa)
Tensile
Strength
(MPa)
Melting Point (!C)
Windform 1.097 3.80% 8928.2 83.84 179.3
Applications of Windform:
In October 2011, CRP Technology successfully completed construction of
a CubeSat built with rapid prototyping and using Windform XT (see Figure
31).
Figure 31: Satellite skeleton prototyped using Windform material (CRP Technology).
A 1U CubeSat called PrintSat was 3D printed by the Montana State
University Space Science and Engineering Laboratory. Once in orbit,
PrintSat will measure and report on the characteristics of Windform XT2.0.
The goal is to validate the usefulness of additive manufacturing for
satellite structures and mechanisms. It will be launched in 2014.
RApidprototyped MEMS Propulsion and Radiation Test (RAMPART) is a
tech demo satellite which will demonstrate the use of rapid prototyping
using Windform XT materials to design, build and fly CubeSats (see Figure
71
32). The entire structure is made of high phosphorus, electroless nickel
plated material to provide radar reflectivity for tracking purposes. Benefits
of the RAMPART propulsion system are the lightweight and specialized
cell structures of the propellant tank made from Windform XT.
Figure 32: RAMPART satellite (Calpoly, 2010).
Experimental Propulsion Labs Additively Manufactured Propulsion System
(AMPS) is at TRL 6-7, and has a propulsion system built via additive
manufacturing technology using Windform XT 2.0 (Dushku, 2012).
2.4 Mechanisms
Satellite mechanisms include one shot devices (such as release mechanisms
and deployment systems), and continuous operation systems (such as solar array
drives, momentum wheels and antenna pointing mechanisms).
72
2.4.1 Antenna Pointing Mechanisms (APM)
Surrey Satellite Technology Ltd's APM, currently at TRL 9, is a low-cost
mechanism designed to complete the payload downlink chain. This APM is
expected to advance the downlink Effective Isotropic Radiated Power (EIRP) in the
order of 13 to 17 dB, compared to a common Isoflux antenna configuration.
SSTLs APM comprises the following elements:
X-Band antenna & RF harness
Elevation drive module
Azimuth drive module
Electronics module
Associated brackets joining the modules together
2.4.2 Deployment and Release Mechanisms
CubeSats and small spacecraft are typically launched into space as piggyback
or secondary payloads. For this reason, pyrotechnic release devices are typically
avoided to minimize the chance of damaging the launcher's primary payload.
Industry is actively working to develop non-pyrotechnic devices to comply with
specifications. The following paragraphs show three examples of SoA release
devices available to small spacecraft.
2.4.3 HoneyComb: Solar Panel Deployment Hinges
Flight Proven on USAF's STPSat-1 in 2007, and currently at TRL 9, Honeybee has
developed multiple precise locking deployment hinges for solar panels and other
appendages. The hinges exhibit stiffness and strength, which requires agile
maneuvering of the spacecraft attitude control system to compensate for
structural flexibility of the solar arrays.
2.4.4 CTERA (Johns Hopkins Applied Physics Laboratory)
Driven by power and volume limitations, the Coefficient Thermal Expansion
Release Actuator (CTERA) developed by Johns Hopkins Applied Physics
Laboratory is inexpensive, has a single moving part, generates no shock, uses
little power, is re-settable, and does not consume any flight parts in its operation.
73
At around TRL 6-7, CTERA has successfully completed functional testing in
vacuum, self-actuation testing and static load testing. The principle operation for
the release mechanism relies on two parts that have complementary thermal
expansion coefficients (Aplanel et al, 2012).
2.4.5 Solar Array Drive Mechanisms (SADM)
The Solar Array Drive Mechanism (SADM) is a flight-tested mechanism that has
flown for many years, and is SoA on many different spacecraft. All the major
spacecraft manufacturers produce SADMs.
3. On the Horizon
A thermally-stable, high-strain, deployable structure made by L'Garde, Inc. is
currently at TRL 2-4. This technology is a composite made of carbon fibers and
elastomeric resin. This combination of materials will allow for a composite with
higher stiffness and strain in comparison to materials currently in use for small
spacecraft. The significance of this innovation is that the proposed material will
enable much more capable deployable structures, as well as minimize
complexity, mass, and cost. This technology can be used for the fabrication of
de-orbiter devices for small satellites (Ariza, 2011).
Deployable Space Systems, Inc. (DSS), in collaboration with the University of
California, Santa Barbara (UCSB), Department of Mechanical Engineering
developed the Roll-Out Solar Array (ROSA). ROSA is an innovative mission-
enabling solar array system that offers enhanced performance for NASA's Space
Science & Exploration missions. ROSA will aid NASA's emerging Solar Electric
Propulsion (SEP) Space Science & Exploration missions through its ultra-
affordability, ultra-lightweight, ultra-compact stowage volume, high strength and
stiffness, and its high voltage and high/low temperature operation capability
within many environments (see Figure 33). It is currently at TRL 3-5.
74
Figure 33: ROSA "Winglet" (Source: NASA).
The ultra-lightweight microcellular nanocomposite foam and sandwich
structures originating from Wright Materials Research Co. will have high specific
mechanical properties, do not involve or release any toxicity and are currently at
TRL 5-6. Potential commercial markets for this ultra-low density nanocomposite
foams and sandwich structures may include electronic housing for satellites and
telecommunication systems (Tan, 2012).
4. Conclusion
In comparison with other subsystems of the satellite, the SoA for structures and
mechanisms is well developed and at high technology readiness levels. The trend
in CubeSats is to use commercial products from 1U to 6U. Companies such as
Pumpkin and ISIS are leading the market. However, some developers choose to
create their own design from a solid block of material, thereby establishing
additive manufacturing as a promising future technology.
Properties of materials are standardized. Metals are valuable for their high
strength and protection against radiation. Various types of aluminum are the
most popular option for most missions. A few have used titanium or
experimented with other metals such as beryllium. Composite materials offer
good performance but their high cost is an important downside for small
satellite projects. Future options may leverage improvements in the additive
75
manufacturing approach by using 3D printed materials. Windform XT may
emerge as a viable option in the upcoming years.
Current mechanisms have a high TRL, since they need to comply with strong
requirements in most of the missions. Deployment mechanisms need proven
reliability before flight in order to ensure the correct behavior of other
subsystems such as communications and power. Commercial companies offer
interesting solutions, however various satellites still opt to develop and build
their own technology.
5. References
Apland, C., et al.: A Novel Release Mechanism Employing the Principle of
Differential Coefficients of Thermal Expansion. Proceedings of the 41st Aerospace
Mechanisms Symposium. Jet Propulsion Laboratory, May 16-18, 2012.
Ariza, Juan Mejia: Thermally-Stable High Strain Deployable Structures. NASA,
2011.
CalPoly: CubeSat Design Specification Rev. 12. The CubeSat Program, Cal Poly
SLO, 2009.
Calpoly. [Online] 2010. Available at:
http://mstl.atl.calpoly.edu/~jfoley/Spring2010/Spring Workshop 2010
PDFs/April 23 Friday/0900 PCBSAT-RAMPART.pdf. [Accessed 08/01/2013]
Dushku, M.: Additively Manufactured Propulsion Systems. Small Satellite
Conference, Logan UT, 2012.
Frame, B.J.: Characterization and process development of cyanate ester resin
composites. Oak Ridge National Laboratory, Engineering Technology
Division,1999.
Frazier, William, Verzuh, Michael, Rohrschneider, Reuben: CubeSat Strategies for
Long-Life Missions. Low-Cost Planetary Mission Conference, 10. Ball Aerospace &
Technologies Corp. June, 2013.
76
Inge, Kai Rokstad, Midtgrd. Birkeland, Roger. Vedvik, Nils: Investigation on the
use of Composite Material for CubeSat Primary Structure. Norwegian University of
Science and Technology (NTNU), Department of Engineering Design and
Materials.
International Alloy Designations and Chemical Composition Limits for Wrought
Aluminum and Wrought Aluminum Alloys (Revised: February 2009).
ISIS: Innovative Solutions In Space. [Online] 2013. Available at: www.isispace.nl
[Accessed 08/02/2013]
Jun, Wei: Opportunities and Applications of 3D Additive Manufacturing. Singapore
Institute of Manufacturing Technology. 2013.
Mojica, Michelle A.: Structural subsystem design, analysis and optimization for a
nanosatellite. San Jose State University, Department of Mechanical and Aerospace
Engineering. San Jose, CA, 2012.
Ozaki, T.: Advanced Composite Parts and Structures for Space Satellites. 52nd,
International SAMPE symposium. 2008.
Passaretti, M., Hayes, R.: Development of a Solar Array Drive Assembly for
CubeSat. 40th Aerospace Mechanisms Symposium. Cocoa Beach, Florida, 2010.
Pumpkin Incorporated: [Online] 2013. Available at: http://www.pumpkininc.com
[Accessed 08/04/2013]
Sandvik, Kim: Development of Composite and Polymer Material CubeSat Structure
with focus on Materials. Norwegian University of Science and Technology,
Department of Engineering Design and Materials. 2012.
SSTL: [Online] 2013. Available at: http://www.sstl.co.uk/Products [Accessed
08/01/2013]
Tan, Seng: Ultra-Lightweight Nanocomposite Foams and Sandwich Structures for
Space Structure Applications. NASA Marshall Space Flight Center. Huntsville, AL,
2012.
77
The University of Texas: Structural Subsystem of CubeSats. [Online] 2003.
Available at:
http://courses.ae.utexas.edu/ase463q/design_pages/spring03/CubeSat/w
eb/Paper Sections/6.0 Structural Subsystem.pdf. [Accessed 07/25/2013].
http://www.windform.it [Accessed 07/30/2013]
78
VII. THERMAL CONTROL SYSTEM
1. Introduction
The examination of a satellites thermal behavior is an iterative process that will
predict temperature distributions throughout components and subsystems, all of
which need to remain in an optimum temperature range for proper functionality.
A small spacecraft can either passively or actively manage its thermal behavior.
Passive Thermal Control Systems (PTCS) are highly attractive to the satellite
designers, especially CubeSat and nanosatellites, because they are associated
with low cost as well as low risk, and have proven reliability. If the spacecraft is
able to preserve thermal stability without additional power requirements then it
is considered passively controlled. This method integrates thermal blankets
such as multi-layer insulation (MLI), thermal coating, and thermal transfer via
heat pipes, washers, bolts, and spacers. All of these techniques are the SoA for
PTCS and are at TRL 9 because they have been demonstrated on several satellite
missions. It should be noted that this is list is not exhaustive.
The system is actively controlled (Active Thermal Control System, ATCS) when
thermal control is accomplished using additional power requirements.
While PTCS are simpler and more reliable, ATCS are associated with higher
precision and have been shown to be more effective for regulating thermal
control (Hogstrom, 2013). However, for temperature sensitive devices such as
batteries, cameras, etc., engineers are able to equip spacecraft with electric
heaters and coolers to maintain operational temperatures. Until spacecraft
designers are able to miniaturize current ATCS techniques, small satellites will
not be able to efficiently use that technology.
79
2. State of the Art
2.1 Passive Thermal Control Systems
2.1.1 Thermal Insulation
Thermal insulation such as MLI has been used on numerous spacecraft as a
radiation barrier from incoming solar flux. A standard sheet of MLI consists of
20-30 layers of # mm aluminized Mylar, where the inner and outermost layers
are 1-2 mm of aluminized Kapton (Baturkin, n.d.), but can be made for particular
layer densities, as shown in Figure 34. MLI material consists of a series of either
gold- or aluminum-plated layers divided by vacuum. Depending on the number
of layers used, MLI has low effective emissivity values (0.002 0.05) due to
neighboring layers radiating heat to one another (Hogstrom, 2013).
Figure 34: MLI (Sheldalh, 2009).
In Figure 35, Hogstrom (2013) illustrated the effective emittance compared to the
number of layers of aluminized mylar, where the lowest number of layers is
proportionate to highest emittance. The ratio of the solar absorptance to the
emittance of the materials bombarded by the Sun is the deciding factor in the
desired amount of solar energy that reaches the spacecraft (Sheldahl, 2013).
While the concept of using a thermal blanket in space can be appealing to
satellite engineers, the delicacy of the material and manufacturing costs may
outweigh the benefits of using thermal blankets on small spacecraft (Hengeveld,
et al., 2010).
80
Figure 35: Effective emittance of MLI layers (Hogstrom, 2013).
DelfiC-3, a CubeSat mission, was equipped with MLI for eclipse durations, and
excess heat was successfully dissipated into space via COMM power amplifiers
(Rotteveel, et al., n.d.). FASTRAC was also covered in Kapton thermal blankets to
assist the passive thermal system. Examples of thermal insulation SoA methods
are described further in Table 31.
81
Table 31: Applications of SoA thermal insulation techniques for small spacecraft.
Technology
MLI blanket
Description
Materials include
polyimide films,
Nome threads, and
PTFE impregnated
glass cloth
Company
Aerospace,
Fabrication
and
Materials,
(USA)
TRL Status
9
Sucessfully used on
SCISAT I and ISS*
Figure
MLI blanket
Aluminized polyester,
polymide, or
flurocarbon
Dunmore
(USA)
9
Sucessfully flown on
CASSINI/HUYGENS
PROBE, ISS, and FUSE*
MLI blanket
Aluminized (one/two
sided) polyester, or
polymide
SHELDAHL
(USA)
9
Sucessfully applied on
BIRD
Beta Cloth 500F
PTFE
type of fireproof
silica fiber cloth, used
in addition to MLI
Chemfab
(USA)
9
Sucessfully used on
Apollo/Skylab7 space
suits, ISS, & MISSE
mission*
*This technology has been flight proven on larger spacecraft. No specific small spacecraft
demonstration flight could be found for specific MLI Company.
2.1.2 Thermal Coating
Another PTCS method changes the optical characteristics (solar absorptance and
emittance) of the surface material simply by applying matte paint. In Figure 36,
Anvari and colleagues (2009) illustrated the spectral absorptance/emittance ratio
of white and black coatings. While black paint will absorb all incident heat, white
paint limits how much heat is absorbed from the surrounding environment due
to its low absorption/emittance ratio (Anvari, et al., 2009).
82
Figure 36: Absorptance/Emittance vs. wavelength for different paints (Anvari, et al., 2009).
The majority of satellite radiators in space are coated in white, or shades of grey
with a range of solar absorptive values, to maximize heat rejection. For example,
on small spacecraft PICARD (150 kg), SG12FD (white) paint was used, where the
absorptivity and emissivity for SG121FD is 0.2+/- 0.02 and 0.88 +/-0.03 (MAP,
2013), which is similar to the absorptivity (0.25-0.5) and emissivity ranges (-.3-
0.9) for AZ Technology white paints. Although this is an inexpensive method to
alter the optical properties of the surface, the application of paint on a CubeSat
requires an onsite professional, curing time, and has a relatively short usable
lifetime (1-2 years). Figure 37 illustrates the appearance of black and white paint
used for thermal coating on a small spacecraft and an optical instrument.
83
Figure 37: ANDE minisatellite with Aeroglaze276 white paint (Anon., 2013) (left) and CorMASS
Optical Bench with AeroglazeZ306 black paint (right).
Tape is known to be a useful resource in the absence of paint; it is easy to both
apply and remove, is relatively inexpensive, and has a longer usable lifetime than
paint (NASA ARC Internal Communications, 2013). For instance, Falconsat-2
applied multiple combinations of thermal tape, aluminum and Kapton (Lyon, et
al., 2002). Aluminum tape has an absorptivity of 0.14 and an emissivity of 0.09,
and Kapton tape has an absorptivity of 0.39 and an emissivity of 0.63 (Lyon, et
al., 2002). AZ Technology, MAP, and Astral Technology Unlimited, Inc.
manufacture thermal coatings (paint and tape) for aerospace use. BIRD applied
white PSG 120 FD paint to its radiator as well as to the back of the outer solar
panels (Lura, et al., 2002). Small spacecraft MITA-O (170 kg) used MLI blankets on
the bottom, front, and rear surfaces and painted them black to increase heat
dissipation into space (Falvella, et al., 2003). In Table 32, some examples of
thermal coatings for aerospace use are shown.
84
Table 32: SoA for thermal coating on small spacecraft.
Technology
Name
Description Developer TRL Status Figures
SG121FD
Non conductive white
paint
silicone / zinc oxide
MAP
(France)
9
Successfully flown on
OUTSat and Demetre
missions
N/A
PSG 120 FD
Non conductive white
paint
silicone / zinc oxide
Akzo Nobel
Aerospace
Coatings
(Netherlands)
9
Successfully used on
BIRD mission
N/A
Aeroglaze A276
White paint with
titanium dioxide/
polyurethane
Lord
Techmark, Inc
(USA)
9
Succesfully used on
ANDE mission
AZW/LA-II
Inorganic ceramic
white paint, using
silacate binder
AZ tech
(USA)
9
Sucessfully flown on
MISSE*
Aeroglaze Z306
Flat black absorptive
polyurethane paint
Lord
Techmark, Inc
(USA)
9
Used on BLUEsat
mission, and on
CorMASS optical bench
*This technology has been flight proven on larger spacecraft. No specific small spacecraft demonstration
flight could be found for specific paint type.
2.1.3 Heat Pipes
An efficient thermal transfer technology is heat pipes. This closed-loop system
transports excess heat via temperature gradients, typically from electrical
devices to a heat sink, allowing the energy to dissipate into space (Steinbeck, et
al., 2010). The heat pipes most commonly used on spacecraft are cylindrical in
shape, and of an aluminum/ammonia
type that allows optimal temperature
control in the 0-40C range (De Parolis &
Pinter-Krainer, 1996), see Figure 38. Heat
pipes are available in a variety of designs
(see Table 33). For example, engineers on
BIRD (37 kg) used MLI, thermal coating, and
Figure 38: Heat pipe schematic
(Thermacore, 2013).
85
cylindrical heat pipes to thermally control spacecraft during orbit (heat pipes
from KPI, National Technical University of Ukraine).
Similar to a heat pipe, a loop heat pipe is a passive, two-phase heat transfer
device, in which a capillary wick moves heat from one location to a condenser, or
radiator. Loop heat pipes are more advantageous than conventional heat pipes
because they can operate for longer periods of time, are much more flexible in
heat transfer lines, and can operate independently of gravitational forces
(Baturkin, 2004). For example, on microsatellite TacSat-4, the thermal control
system relied solely on a loop heat pipe to maintain thermal stability, see Figure
39 (Dussinger, et al., 2009).
Figure 39: Loop heat pipe schematic (Dussinger, et, al, 2009).
Also analogous to traditional heat pipes are flat platesrectangular stainless
steel tubing sandwiched between two aluminum plates and charged with a
working fluid inside (Nakamura, et al., 2013). Designed specifically as a C-shape,
this technique was incorporated on the SDS-4 (50 kg) mission and has been a
successful thermal control system (Nakamura, et al., 2013; see Figure 40).
86
Figure 40: SDS-4 minisatellite thermal control system using flat heat pipe design (Nakamura, et
al., 2013).
Advanced Cooling Technologies (ACT) and Thermacore Inc. produce several
active and passive thermal control systems including heat pipes, loop heat pipes,
flat plates, and variable conductance heat pipes for aerospace use.
Table 33: Examples of SoA heat pipe technology for small spacecraft.
Technology Description Company TRL Status Figure
Heat pipe
Close loop
heat transfer
system,
either via
capillary
action or
gravity
Advanced
Cooling
Technology,
Inc.
(USA)
9
Sucessfully used on
BIRD mission
Two-phase
heat transfer
device, using
capillary
action to
move heat to
a radiator
Advanced
Cooling
Technology,
Inc.
(USA)
Loop heat pipe
9
Sucessfully used as TCS
on TacSat-4
9
Successfully flown on
SDS-4
Flat
rectangular
shape using
capillary
action to
move heat to
a radiator
Flat plate heat
pipe
Advanced
Cooling
Technology,
Inc.
(USA)
87
2.1.4 Bolts and Washers
To limit heat transfer, materials with low thermal conductivity such as titanium
bolts, washers, and spacers can be incorporated into the satellite structure.
These items reduce the thermal path to sensitive areas on the spacecraft, such as
the payload or battery. In one instance, Pharmasat mission engineers used
titanium bolts and Ultem washers to help limit the heat transfer from the solar
panels to the pressurized payload chamber (Hogstrom, 2013).
2.2 Active Thermal Control Systems
2.2.1 Electrical Resistance Heaters
Electrical resistance heaters simply supply heat to a spacecraft, specifically to the
battery in smaller spacecraft. They are switched on and off according to the
temperature range of a particular component, or can be left on continuously via
a thermal control unit (De Parolis & Pinter-Krainer, 1996). In orbit, a CubeSat
primarily relies on solar arrays for power production but is commonly unable to
fully supply all of the spacecrafts required power during periodic peaks and
eclipse durations (Horvth, et al., 2012). Eclipse durations can interrupt the
amount of heat supplied to the battery or other crucial components and require
stored electrical assistance. For example, on CubeSat MASAT-1, resistance
heaters were attached to the Lithium-Ion Polymer battery to maintain operational
temperature during eclipse periods (Horvth, et al., 2012). Nanosatellite OUTFI-1
also connected two heaters (250 mW each that were actuated when temperature
transgressed <5C) for the two batteries (NOL, 2010).
2.2.2 Thermo-Electric Coolers
Similar to devices that need to be kept warm during spaceflight, there are also
pieces of equipment that require low operational temperatures to function. A
thermoelectric cooler is made up of semi-conductor-based components that
function as small heat pumps (Farison, et al., 2010). This device is able to
maintain cool temperatures for sensitive devices, such as cameras and sensors,
even when surrounded by a spacecrafts heated constituents. For instance,
CloudSat (3kg) required the assistance of a two-stage electric cooler, created by
88
TE Technology, to maintain low operational
temperatures of the camera-imaging detector
during orbit (Farison, et al., 2010; see Figure 41).
A four-stage thermoelectric cooler is available
that can target more definitive temperatures
than the less-sensitive two-stage thermoelectric
cooler, which allows for more precise
temperature control.
2.3 Integration and Modeling
In the early production stages, thermal calculations can be performed by treating
the system as a basic sphere with uniform optical properties representative of
the spacecrafts average thermal control, using only solar flux and internal power
dissipation (Hogstrom, 2013). Once general thermal characteristics are known,
computer software is used to evaluate detailed thermal transfer in the system.
Thermal Desktop and ANSYS are known products for simulating the generated
external and internal heat flux.
Figure 41: Two stage cooler from TE Tech.
Inc., on Cloudsat (Farison, et al, 2010).
3. On the Horizon
3.1 Passive Thermal Control Systems
3.1.1 Thermal Insulation
An effective and inexpensive way to insulate a spacecraft is to use MLI on the
external surface; however, this requires special handling and installation of the
MLI material onto the spacecraft. Silica Aerogels, developed by NASA, have a
comparable performance to MLI efficiency and have been demonstrated as an
improved method of insulation. They reduced installation time by nearly 50%,
cost approximately 35% less, and have an 11% reduction in mass compared to
regular MLI applications (Hengeveld, et al., 2010). Aerogels have the lowest
associated thermal conductivity and density value of any solid, which means they
have high insulation characteristics and are lightweight, as shown in Figure 42.
Although the material is fragile and brittle, the silica aerogel can sustain high
compressive pressures and can be reinforced to improve mechanical properties
89
(Burg, 2006). While silica aerogel has not been thoroughly tested on small
spacecraft, it has been incorporated on the Mars Exploration Rovers thermal
system (Burg, 2006); therefore current TRL is estimated to be at 4-5.
Figure 42: Silica aerogel (Wikipedia, 2012).
3.1.2 Heat Pipes
While heat pipes have been a resourceful method of heat transfer for numerous
small spacecraft missions, ongoing work continues to improve this technique.
Inventors Youssef Habib, Lyman Rickard, Bryan John, and John Steinbeck have
patented a nano-structured wick for a heat pipe that would improve upon several
current technological limitations. By altering the length and spacing of the
bristles and material of the internal wick, there have been several advancements
in weight, size, thermal resistance, and heat flux capacity of the heat pipe. These
modifications have shown a ten-fold increase in the transfer capacity in current
heat pipes. In comparison to the current sintered powdered configuration, the
condensed array of packed-together bristles produces high capillary pressure,
increases the fluid flow in the wick, and the aligned configuration of the bristles
supply clear paths for vapor venting, thus reducing thermal resistance 35-50%
(Steinbeck, et al., 2010), as shown in Figure 43.
90
Figure 43: Nano-structured wick comparison to current sintered powder (Steinbeck, et al., 2010).
The invention of the nano-structured heat pipe was supported by a US
Government Phase I SBIR Navy Contract. The European Space Agency is also
currently funding development and flight tests of miniaturized loop heat pipes
with multiple evaporators and condensers (Ku, et al., 2007). Validation tests have
exceeded requirements for start up, heat transport, operation, thermal load
sharing, and large homogeneous portfolio (LHP) model correlation in thermal
vacuum environments (Ku, et al., 2007). The technology was going to be tested
for flight validation under NASAs New Millennium Program ST8 Project, however
this project was cancelled. Current TRL status for the nano-structured wick is 5.
3.2 Active Thermal Control Systems
3.2.1 Fluid Loops
A pumped fluid loop achieves sufficient heat transfer between multiple different
locations via forced fluid convective cooling. Currently, mechanically pumped
fluid loops are not attractive to small spacecraft engineers due to the heavy
power consumption and small spacecraft mass limitations. However, there is a
single- and two-phase mechanically pumped loop concept that is being
investigated for microspacecraft thermal management (Birur, n.d.).
A single-phase pump circulates the fluid while a two-phase heat transfer takes
place in the evaporator and condenser (Birur, n.d.). For the single-phase pump
loop, the current mass and power targets for this fluid loop system are less than
5 kg and 5 W to manage up to 100 W of spacecraft power (Birur, n.d.). This
technique is at TRL 3-4.
91
3.2.2 Cryo-Management
Improved cooling technology on small spacecraft would greatly enhance the
ability to use cryogenic propellants in space. Currently, aerospace engineers are
simply miniaturizing current heat pipe cooler designs to be adapted for
microsatellite use. A heat pipe cooler uses high efficiency evaporation and
condensation cycles of working fluid to transfer heat, and is advantageous over
other active thermoelectrics (fluid and loop phase cooling) due to the lower levels
of energy usage and noise, higher efficiency, and structural reliability (Steinbeck,
et al., 2010). CubeSat CryoCube-1 will demonstrate innovative thermal control
technologies including radiation shields, MLI, and cryogenic management for low
Earth orbit passive cooling. This flight test will increase the current TRL value of
4-5 to TRL 7.
3.2.3 Variable Emissivity Surfaces
By simultaneously altering the optical surface properties and the path of heat
transfer, variable emissivity surfaces can be used as a potential method for
thermal balance modulations (Hengeveld, et al., 2010). A radiator with variable
emittance capability offers comparable thermal control potential to a mechanical
louver (see following subsection), including decreased mass, cost, and
mechanical complexity (Paris, et al., 2005).
3.2.3.1 Micro Louvers
A louver, or shutter system, is a useful option to transfer heat around a
spacecraft. It can either provide a heat sink during hot phases (Sun illumination)
or heat insulation during eclipse durations (De Parolis & Pinter-Krainer, 1996).
However, the associated mechanisms and mass can limit the overall reliability of
the system (De Parolis & Pinter-Krainer, 1996), which makes it very complicated
for smaller satellites to utilize the louver system. Shutters and louvers utilizing
MEMS technology enable nano- and picosatellite active and efficient thermal
control. Inventors William Trimmer and Belle Mead have devised a micro louver
by creating a reflective/absorbing device that can be configured to control heat
absorption and emission by a spacecraft. This micro louver provides a reflective
covering over the spacecrafts surface, which can be curled up to expose the
92
spacecraft to the Sun, or uncurled over surface to protect it (Trimmer & Mead,
2001). The orientation of the reflective material will influence whether or not
heat will be absorbed (warmed) or emitted (cooled) from the satellite. This idea is
advantageous to the small spacecraft community as a basic lightweight structure.
3.2.3.2 Electrochromatics
Materials that are electroactive, or electrochromic, are able to reverse their
reflectance in the presence of an electric field, and may be manufactured into
ultra-lightweight thin-films or coatings (Paris, et al., 2005). When a small voltage
is applied, a charge buildup occurs in the electrochomic materials, which
modifies material reflectance (Paris, et al., 2005). Researchers at JPL and Ashwin-
Ushas Corporation are improving this technique for microspacecraft use (see
Figure 44), which could be developed as thermal control for multiple devices.
This technology needs to be demonstrated in orbit; it is currently at TRL 4.
Figure 44: Dual-electrode electrochromic device (Ashwin-Ushas Corp., Inc.).
4. Conclusion
Miniaturizing thermal technology is vital for implementing many thermal control
systems in small spacecraft. SoA techniques for small spacecraft thermal control
subsystems are well developed, but current advances include improving overall
weight, mass, volume, cost, durability, and efficiency of the thermal control
system. Thermal insulations (MLI) and coating (paint & tape) are effective SoA
techniques for PTCS for small spacecraft; however, ATCS systems are currently
limited in their small spacecraft applications due to mass and power budgets.
Nevertheless, engineers are designing micro-devices for each technique that
93
require less power and are much smaller in mass, volume, and weight. While
these proposed technologies may not have been demonstrated in space just yet,
future testing and validation are expected to increase their low TRL values.
5. References
Agency, E. S.: Loop heat pipe. [Online] 2007.
Available at: http://www.esa.int/TEC/Thermal_control/SEM8JNBE8YE_0.html
[Accessed August 2013].
Anvari, A., Farhani, F., Niaki, S.: Comparative Study of Space Qualified Paints Used
for Thermal Control of a Small Satellite. Iranian Journal of Chemical Engineering,
6(2), 2009.
Baturkin, V.: Micro-Satellites Themral Control. Acta Astronautica, pp. 1-4, 2004.
Baturkin, V., n.d.: Micro-Satellites Thermal Control Concepts and Components.
National Technical University of Ukraine. Kyiv Polytechnic Institute, s.n.
Birur, G., n.d.: Thermal Control of Small Spacecraft Using Single and Two-Phase
Fluid Loops. Jet Propulsion Laboratory, California Institute of Technology, s.n.
Burg, B.: Thermal Control Architecture for Planetary and Lunar (Sub-) Surface
Exploration Robots. Zurich, s.n., 2006.
De Parolis, M. N., Pinter-Krainer, W.: Current and Future Techniques for
Spacecraft Thermal Control 1. Design drivers and current technologies. [Online]
1996. Available at: http://www.esa.int/esapub/bulletin/bullet87/paroli87.htm
[Accessed August 2013].
Dinh, D.: Thermal Modeling of Nanosat. s.l.:s.n., 2013.
Dussinger, P. M., Sarraf, D. B., Anderson, W. G.: Loop Heat Pipe for TacSat-4.
Hunstville, AL, s.n., pp. 91-100, 2009.
Falvella, M. C. et al.: MITA: An Italian Minisatellite for Small Missions. Advances in
Space Research, 31(2), pp. 357-361, 2003.
94
Farison, M., Hicks, K., Schmidt, M., Yang, S.: Cloud CubeSat Thermoelectric Cooler
Controller. Baltimore, MD, s.n., 2010.
Hengeveld, D., Braun, J. E., Groll, E. A., Williams, A. D.: Review of Modern
Spacecraft Thermal Control Technologies. West Lafayette, s.n., 2010.
Hogstrom, K.: SoA Thermal Analysis Methods and Validations for Small
Spacecraft. s.l.:s.n., 2013.
Horvth, G., Marosy, G., Glisics, S. & Czifra, D.: Battery characterization for
CubeSat missions with battery tester application. Tallinn, Electronics Conference
(BEC). 13th Biennial Baltic, pp. 97 - 100, 2012.
Inc., T.: Loop Heat Pipe for High Density Small Satellite Thermal Control. [Online]
1995. Available at: http://sbir.nasa.gov/SBIR/successes/ss/5-043text.html
[Accessed August 2013].
Ku, J., Ottenstein, L., Pham, T., Douglas, D.: Miniature Loop Heat Pipe with Multiple
Evaporators. Greenbelt, MD, s.n., 2007.
Lam, T. T., Birur, G. C., Bhandari, P.: Pumped Fluid Loops. Spacecraft Thermal
Control Handbook, Volume I: Fundamentals Technologies. s.l.:s.n., pp. 405- 471,
2002.
Lura, F. et al.: Thermal Design and Pre Flight Thermal Test Program of Satellite
BIRD Micro. San Antonio, TX, s.n., 2002.
Lyon, R., Sellers, J., Underwood, C.: Small Satellite Thermal Modeling and Design
at USAFA: FalconSat-2 Applications. s.l., Aerospace Conference Proceedings. IEEE,
pp. 3391 - 3399, 2002.
Nakamura, Y. et al.: Small Demonstration Satellite-4 (SDS-4): Development, Flight
Results, and Lessons Learned in JAXA's Mircosatellite Project. s.l., s.n., 2013.
NOL, J.: Thermal issues settlement and test procedure investigation of OUFTI-1
nanosatellite. Lige, Belgium, s.n., 2010.
95
Olivia, A., Schaalman, G., Stanley, S.: Design and Analysis of Subsystems for a
CubeSat Mission. Worchester Polytechnic Institute, Mechanical Engineering
Department. s.n., 2011.
Paris, A. et al.: Electrochromic Radiators for Microspacecraft Thermal Control. s.l.,
s.n., 2005.
Pendleton, S., Basile, J., Fowler, E., n.d.: Low-Cost Flat Plate Adapters for Dual
Primary Payload Missions. CSA Engineering Inc. Mountain View, CA.
Rotteveel, J. et al., n.d.: Delfi-C3: A Student Nanosatellite Test Bed for in-orbit
Demonstration of Micro Systems Technology. s.l.:s.n.
Sarda, K. et al.: Canadian Advanced Nanosatilllite Experiment 2: On-Orbit
Experiences with a Three-Kilogram Satellite. Logan, UT s.n., 2008.
Selva, D., Krejci, D.: Survey and Assessment of the Capabilities of CubeSats for
Earth Observation. Journal of Acta Astronautica, Volume 74, pp. 50-68, 2012.
Steinbeck, J. W., Habib, Y. M., John, B. G., Rickard, L. H.: Heat Pipe with
Nanostructured Wick. Patent No. US 2010/0200199 A1. PLEASANTVILLE, NY, USA,
2010.
Trimmer, W., Mead, B.: Micro Louvers for Cooling. Patent No. US 2002/0056790
A1. McLean, VA, USA, 2001.
96
VIII. COMMAND AND DATA HANDLING
1. Introduction
Command and data handling (C&DH) is handled by the spacecraft flight
computer, usually a general purpose processor. Other on-board processing may
be needed depending on the spacecraft architecture. For small spacecraft,
general and application-specific processing units will be discussed agnostic to
actual function. For context, a brief segment on processing functions will be
provided. C&DH is the brains of the spacecraft, responsible for dictating
spacecraft functions (i.e. spacecraft control and execution, data management,
storage and retrieval) and compiling inputs and outputs of other subsystems.
The key characteristic of this system is high reliability (hi-rel) since it is the
central part of the spacecraft. Often this reliability is realized by redundancy and
use of radiation-hardened (rad-hard) components. The processing requirement
for the C&DH function has been relatively static through the years. In centralized
architectures, other processing needs (e.g. payload interface, signal processing)
are handled through a core C&DH processor. The push for higher processing
capabilities in C&DH and other processing elements are driven by advancing
scientific studies looking for higher resolution and data throughput.
In addition to the processing unit, the main components of the C&DH system
include memory, clock, and interfaces to communicate with other subsystems, as
shown in the architecture diagram in Figure 45.
97
Figure 45: Typical smallsat C&DH architecture and image of C&DH board (Space Systems
Laboratory).
2. State of the Art
A cursory attempt is made to survey SoA hardware C&DH components to capture
the current state of small satellite capability. The survey, while not
comprehensive or exhaustive, should still yield good insight into the current
state of practice for small spacecraft. The goal of this effort is not only to convey
basic research on the SoA, but to solicit inputs and sources to be shared with the
greater community in future revisions.
While smallsats, especially in the nanosat class, have higher risk tolerance and
are able to rely more on COTS components, much of the aerospace industry still
relies heavily on stringent standards that ensure reliability. Using COTS
components has been explored and debated over the years. On one side, cost
savings can be demonstrated by using typical, more capable and less expensive
COTS components at the price of increased risk. On the other hand, as smallsat
capabilities increase, the functions that they support will have greater
importance and consequently will require higher reliability. Standard COTS
98
electronics fail with a total ionizing dose (TID) of 3 to 30 krads, while radiation
hardened parts offer protection from 100 krads to Mrads. In brief, the use of
COTS components in the development and experimental phases is increasing
(with proficient components being brought along to higher standards), while
QML Class V standards are still expected of failsafe missions.
2.1 Form Factor
Prior to 2000, the majority of spacecraft C&DH and on-board processing boards
were custom built. As commercial technology advanced, specific standards
emerged allowing collaborations across industries. Three form factors are
common in space applications and are listed with dimensions in Table 34.
Table 34: C&DH form factor.
C&DH Form Factor Dimensions [mm]
6U cPCI 233 x 160 mm
3U cPCI 100 x 160 mm
PC/104 90 x 96 mm
While the dimensions in themselves are not restrictive for the larger class of
smallsats, volumetric constraints play a crucial factor in the smaller end of the
spectrum. The nanosats class typically uses the PC/104 backplane-less form
factor because of limited volume. Micro- and minisats use 3U-6U configurations
depending on the specific functional block needed with respect to the usable
area on the board. Custom configurations are still used for special cases. Beyond
volume, the next main limiting factor for smallsat C&DH is power.
2.2 Microprocessor/Computer/Microcontroller
Spacecraft processing capability has followed the commercial market. The slow
development may be due to the rigors of qualifying operations in the space
environment and limited production volumes. Nonetheless, processing resources
are increasing while spacecraft processing requirements have stayed relatively
static. Typical C&DH systems need a processing throughput of ~30 MIPS. This
does not include payload and digital signal processing, which are driving the
industry towards greater processing capabilities, data throughput and storage.
99
Early spacecraft computers like the 32-bit RH32 and RICS/6000 provide <40
MIPS. The RAD6000 and RAD750, introduced in the 2000s timeframe, are more
capable rad-hard solutions providing up to 300 MIPS. These throughput values
satisfy typical C&DH functions but require a lot of power (~20 W). While this is
less of a concern for the typical 1,000+ kg satellites of the time, it poses a
challenge for smallsats. Typical orbit average power vs. spacecraft mass is shown
in Figure 46.
Figure 46: Orbit average power vs. satellite mass.
The general trend improves with tracking arrays or pointable spacecraft, however
the linear fit shows power generation typically less than 1 W per kg spacecraft
mass. The smaller classes of smallsat are highly power constrained. Luckily for
smallsat designers, the world of microprocessors, computers and
microcontrollers is ever expanding in the commercial market. Small hand-held
and mobile devices are driving smaller form factors with low power
consumption. In space applications, the push for more computational power
from payload and digital processing systems has driven the space industry to
seek practical solutions in using COTS components and technology. In the
aerospace industry, due to the higher reliability standards mentioned before,
there are still just a handful of core manufacturers (Atmel, Microchip, TI,
Freescale, etc.) that dictate trends in the market. Figure 47 shows the qualitative
trend of processing elements used as spacecraft on-board computers.
100
Figure 47: Satellite processing trends
The size of C&DH systems has scaled down over time, to the aforementioned
form factors. Performance, on the other hand has steadily increased more or less
in concert with Moores Law.
In terms of technology, there are microcontrollers (MCU), digital signal
processors (DSP), field programmable gate arrays (FPGA), and traditional
application specific integrated circuits (ASIC). For simple data processing, FPGAs
outperform DSPs with regards to computational speed, power consumption, and
volume. DSP are used for complex repetitive calculations (e.g. image processing
and data compression). Often the various technologies are mixed and matched to
meet specific requirements. Circa 2005, integrated RISC/DSP processors offered
higher performance and lower system power. For smallsats, power, thermal and
volume constraints are more apparent and various mixed technology solutions
have been used. Atmel and Xilinx are two of the main manufacturers of rad-hard
integrated circuits (IC) for space applications and their use can be seen
throughout the industry.
101
There are many differentiating factors (technologies, architectures, peripheral
interfaces etc.) surrounding the C&DH systems. While the goal is to be as
exhaustive and inclusive as possible in capturing the SoA of smallsat capabilities,
for brevity only some prominent and recent systems will be highlighted, see
Table 35, Table 36, and Table 37.
Table 35: Examples of SoA processing elements for small spacecraft (1/3).
Technology
Name
Description Developer TRL Status Image
!RTU
Remote Terminal
Units (RTU), 32-bit,
fault-tolerant
AAC Microtech
(USA)
9
Flown on SPRITE-
SAT, TechEdSat
processor
uses Actel
RTAX2000S/SL
FPGA
9
Flown on
Chandrayaan-1,
ARGO, & PRIMSA
LEON3FT-RTAX
AeroFlex - Gaisler
(Sweden)
9
Flown on ERNObox
(prototype
computer payload)
on ISS in 2008 &
Proba-2 in 2009
AT697F
(LEON2-FT)
Rad-Hard 32-Bit
SPARC
V8 processor
Amtel
(USA)
AVR8
8-bit
microcontroller
Amtel
(USA)
9
Flown on AAUSat-3
Smart ARM
microcontroller,
flash-based, cortex
processor
AT91M40807
Amtel
(USA)
9
Flown on SRMSAT
102
Table 36: Examples of SoA processing elements for small spacecraft (2/3).
Technology
Name
Description Developer TRL Status Image
RAD750
RAD750 is a radiation
hardened PowerPC
microprocessor. It replaces
RAD 6000 which is a hardened
version of IBM RS/6000 used
by 200+ spacecrafts
BAE System
Electronic
Solutions
(USA)
9
Flown on Curiosity,
Juno, WISE, LRO,
Kepler, & MRO;
first flown on Deep
Impact (2005)
Mirideon
PPC440
Single board computer using
BRE440
BRE
(USA)
9
Flown on SB-Sat
Nanomind
A712D
ARM, RISC based computer
processor
GOMSpace
(Denmark)
9
Flown on STRAND 1
SH
Super H (SH), 32-bit RISC used
in embedded applications (e.g.
appliances, engine control,
mobile phone)
Hitachi
(Japan)
9
Flown on PROITERES
(2012)
StrongARM
StrongARM SA1100/Xscale
processor; 88 MHz - 220 MHz
experimental
Intel
(previously
Digital
Equipment
Corp, ARM
Limited)
(USA)
9
Flown on SNAP-1, X-
Sat, FalconSat-2,
TacSat-1, & DMC-1G
SpaceCube II uses HRS5000S processor
JAXA
(Japan)
9
Flown on SDS-1 &
ASNARO
RT ProASIC3
Low power, reprogrammable,
flash-based FPGA
Microsemi
(previously
Actel)
(USA)
9
Flown on X-Sat
N/A
SpaceCube 2M
SpaceCube 2.0 Mini for
CubeSats
NASA
Goddard
(USA)
9
Flown/Proposed on:
Intelligent Payload
Experiment (IPEX),
TechCube, & SDS-1
103
Table 37: Examples of SoA processing elements for small spacecraft (3/3).
Technology
Name
Description Developer TRL Status Image
STM32F103 N/A
STMicroelectonics
(Geneva)
9
Flown on
ESTCube-1
SBC
Sparc
v7(TSC695F),
21020 DSP, RTX-
2010,
PowerPC603e,
Sparc v8(TSC697)
SwRI
(USA)
9
Flown/Proposed on
Juno, WISE, Kepler,
GLAST, Orbital
Express, Deep
Impact, Swift,
Coriolis, & DS1
Mongoose-V
R3000, 32-bit
microprocessor,
built for DOE
applications
Synova
(USA)
9
Flown on EO-1, MAP,
ST5, CONTOUR,
TIMED, New
Horizons, & IceSat
Glas
MSP430
Family of low
power
microcontroller;
16-bit RISC, used
in Pumpkin
FM430
Texas Instruments
(USA)
9
Flown on CSSWE,
Delfi-C3, HawkSat-1,
ITU-pSAT1, AIS
Pathfinder 2,
GOLIAT, e-st@r, &
Libertad-1
Q6 processor
board
Based on Xilinx
Spartan 6
Xiphos
Technologies
(Canada)
9
First flew in 2011,
many previous
flights with prior
version
Only some missions actually use the latest and most capable elements listed
above. Spacecraft missions have diverse processing requirements leading to the
use of various processors and technologies. On one hand, there are novel
missions like PhoneSat, which used the newest technologies available in the form
of unmodified smartphones and Arduninos as the main processing element. On
the other hand, it can be seen that even recent missions use some of the older
processing elements. Outdated processors such as the RAD6000 and NSSC-1
104
(NASA Standard Spacecraft Computer-1) are not listed in Table 35, Table 36, or
Table 37, though they are still used from time to time.
With many capable processing elements in the market, one of the main decisive
factors leading to processor selection (other than matching functional
requirements to capability) is heritage. With that in mind, parts obsolescence
becomes an issue with rapidly advancing technology.
A trending study has shown an overall increases in using integrated circuits in
space with a recent inclination towards FPGAs (see Figure 48). ASICs have been
the preferred space-based solution as they typically offer the highest density,
lowest weight and power, but they lack flexibility, have higher cost and longer
schedules. Smallsats are typically tied to smaller budgets and schedule, which
leads them to use other ICs.
Figure 48: Trends for integrated circuits in space (ESA; Furano, 2012).
Another factor contributing to more FPGA usage in space applications is
radiation tolerance. The two prominent FPGA technologies are SRAM- and
antifuse-based. SRAM-based FPGAs typically offer higher densities then antifuse
but are more susceptible to radiation. Mitigation techniques such as triple
105
modular redundancy (TMR) are typically employed. Xilinxs Virtex-5QV FPGA
offers a rad-hard reconfigurable processing option. Prior FPGAs have been one-
time programmable.
2.3 Memory/Data Storage
The range of on-board memory for smallsats is wide, typically starting around 32
kb and increasing with available technology. Again, for C&DH functions, on-
board memory requires high reliability. Different memory technologies are
available, but SRAM is typically used. A comparative chart showing performance
of various memory types is shown in Table 38.
Table 38: RAM comparison.
106
Thanks to the commercial industries and advancing technology, data storage has
continued to increase with relatively static mass, power and volume
requirements. This is complimented by more space usage and increases in
reliability and heritage. Memory and data storage are currently not of great
concern to smallsat designers. The limiting factor in the end-to-end information
system is the data transmission rates. Typical missions can now store more than
they can transmit down to ground stations. Figure 49 shows the SoA capability of
solid-state recorders.
Figure 49: An example of SoA solid state recorder capability (SEAKR).
The trend for the smaller class of smallsats to use more COTS components
remains true for data storage hardware. High heritage developers like SEAKR are
apparent throughout the spacecraft industry, and emerging commercial
companies offer high performance components. Table 39 below illustrates SoA
technologies for data storage.
107
Table 39: Examples of SoA applications for memory components.
Technology
Name
Description Developer TRL Status Image
MRAM
magnetic material
and silcon IC
combined to form
fast reliable non-
volatile memory
AeroFlex
9
Flown on M
3
, SpriteSat
(Rising), ALL-STAR,
SOMP, & GOLIAT
CASI
Camera and storage
interface board
BRE
9
Flown on TacSat2, XSS-
11, AMS, Angels, &
LADEE
MR0A08B
Magetic polarization
storage MRAM
EverSpin
9
Flown on ALL-STAR &
Rising-2
Compact SSDR
Solid state data
recorder
Innoflight
9
Flown on RASAT,
TechDemoSat-1, & DMC-
1G,
HSSU
High speed storage
unit
SEAKR
9
Flown on GeoEye-1 &
WorldView-1
SSDR
Solid state data
recorder
SEAKR
9
Flown on NEAR, ACE
HSDR
High speed data
recorder, 16 GB
SSTL
9
Flown on Nigeriasat-2
2.4 Bus and Interfaces
The system bus connects major computer system components. Modern
computing systems have a variety of separate buses customized to specific
needs. Interfaces significantly vary from basic to extremely complex. MIL-STD-
1553 has been the standard for spacecraft and ESAs SpaceWire (SpW) is
becoming more prominent. For nanosats, ATK has developed the A100 bus,
especially designed for payloads less than 15 kg. These platforms are compatible
108
with most launch systems and a wide range of payload interfaces. The A100 bus
has flown on NASAs ARTEMIS mission.
While universal serial bus (USB) and controller area network (CAN) buses are
being used sporadically, the I$C data protocol seems to be the most popular
standard bus system for nanosat missions, due to power reasons. I$C consumes a
very small amount of energy and is already integrated in most microcontrollers,
avoiding the necessity of extra electronics. A singular and flexible interface for
different payload types is desirable. Some of the most common interfaces are
listed below with a brief description:
CAN Bus Controller Area Network Bus
I
2
C inter-integrated circuit - low power consumption, low speed
(100 kbps), multi-master capability, strong commercial support
LVDS low voltage differential signaling
MIL-STD-1553 Bus moderate speed (1 Mbps), standard for most
OBDH systems
MIL-STD-1394 Bus high speed (100 Mbps)
PCI Bus Peripheral Component Interconnect, local computer bus
to connect other hardware to a computer
RS-232 traditional standard serial connection
RS-422 traditional standard enabling digital differential signaling
circuit
RS-485 traditional standard enabling multi-point system
SerDes serializer/deserializer
SpaceWire standard for high speed links (<160 Mbps)
SPA-S Spacecraft plug-and-play spacewire
SPA-U Spacecraft plug-and-play USB w/ +28V
SPI Serial Peripheral Interconnect
UART Universal Asynchronous Receiver/Transmitter
USARTUniversal Synchronous/Asynchronous Receiver/Transmitter
USB universal serial bus
109
2.5 Frequency Source
C&DH functions include maintaining spacecraft clock or time. Timing provided
by a frequency source enables controlled timing events, time-tagged data, and
navigation. Traditionally, spacecraft have employed quartz resonators for timing
(Norton & Cloeren, n.d.).
Recently, DARPA has made an effort to incorporate miniaturized and low power
Chip-Scale Atomic Clocks (CSAC) into small satellites. These tiny atomic clocks
fit into small satellites while improving frequency performance and time
references. In addition, the Integrated Micro Primary Atomic Clock Technology
(IMPACT) is a project that aims to improve the capabilities of CSAC by reducing
the power requirements while maintaining the accuracy and stability of the main
clock. It is on its second phase and the goal is to deliver a 20 cc, 250 mW
working clock that will have less than 160 ns time loss after one month (DARPA).
There are some series of cesium, rubidium, and quartz oscillators for frequency
sources with proven reliability in Space. SC-cut quartz resonators provide
reliability and they meet NASA Grade 1 standards. They can function under
adverse temperature conditions and their output frequency ranges from 4 to 60
MHz.
Other options consider the problem of high exposure to radiation. A Radiation
Tolerant Low Power Precision Time Source (LPPTS-R) has a frequency of about 10
Mhz. Some of the most popular vendors are Symmetricom, Kernco and Rakon.
The classical resonators offer a reliable solution that has been used extensively
in the last few years. Nevertheless, it appears that there is an effort to improve
the capabilities of small satellites by adding the new micro-atomic clocks.
2.6 Power Distribution System Electronics
Depending on the bus disposition, different architectures can be implemented
for the power distribution on board. One of the most common interface
standards is the 28 V bus, which is linked with a distributed architecture. By
using distinct switchers, many components can be connected to the main core of
the electrical power system (EPS). Another option is to choose a centralized EPS
110
architecture which provides more than one power bus to manage different
devices. Regulators are needed in this architecture and engineers should take the
potential for overloads into account in order to avoid failures. Thus, there is a
trade-off between simplicity and performance, since having multiple components
will increase complexity. For nanosats, volume constraints often trump added
complexity. Table 40 illustrates a survey of nanosat missions with different EPS
architectures.
Table 40: EPS architecture (Burt, 2012).
Mission Size Architecture Distributed/Centralized
#of
Buses
Bus Voltage
AAU 1U MPPT Centralized 1 5R
AtmoCube 1U DET Centralized 6 3.3R, 5R, 6R, -6R, -100
Colony 1 3U PPT Centralized 3 7.2bat, 3.3R, 5R
Compass One 1U PPT Centralized 3 3.3R, 5R
CP3 1U PPT Distributed 6 3R, 3.7bat
CP4 1U PPT Distributed 7 3R, 3.7bat
CUTE-1 1U DET Centralized 3 5R, 3.7bat, 3.3R
CUTE-1.7 2U PPT Centralized 4 3.3R, 5R, 6R, 3.8bat
Delfi-C3 3U DET Distributed 1 12 R
DICE 1.5U PPT Centralized 3 7.2bat, 3.3R, 5R
DTUsat 1U Distributed 1 3.6R
e-st@r 1U PPT Centralized 3 7.4bat, 5R, 3.3R
Gollat 1U DET Centralized >1 7.4bat, others
HAUSAT 1U Centralized 3 5R, 3.3R, 3.6bat
Hermes 1U DET Distributed 4 7.4R, 5R, 3.3R
KUTEsat 1U Centralized 3 5R, 3.3R, 12bat
KySat 1U PPT Centralized 3 12bat, 5R, 3.3R
MEROPE 1U PPT Centralized 5 5R, -5R, 6R, 8R
OuFTl-1 1U DET Centralized 3 7.2bat, 3.3R, 5R
QuakeSat 3U DET Centralized 2 5R, -5R
Sacred 1U Centralized 2 5R, 3.3R
SEEDS 1 1U DET 1 5R
XI-IV 1U DET Centralized 3 5R
XI-V 1U DET Centralized 4 5, 3, 8bat
111
Though a centralized configuration is more common, there are studies claiming
that a distributed system is more efficient as it is more flexible and has higher
degree of utility (Burt, 2011). In most of the architectures shown above, the
satellite distributes a 5 V, a 3.3 V, and sometimes a third regulated voltage to the
battery bus.
All the electronic spacecraft components have gone through changes over the
last few years. A plug-and-play approach allows a faster integration of previous
designs and platforms but all the different subsystems must comply with a rigid
group of physical, electrical and software standards. Customized designs are
preferred by the majority of developers to allow adaptations to specific payload
needs. The downside to customized electronics is increased requirements in
terms of budget and time. Space plug-and-play avionics are self-describing and
can be thought of as black boxes; they can communicate with each other by
network protocols (Bruhn et al., 2011). Plug-and play avionics are taking a more
prevalent role as standards are adopted yielding the possibility of parallel
development and simpler integration for different components. Some attempts
to realize the plug-and-play concept have been conducted. For example, the
QuadSat-PnP mission, launched in 2011, used this approach.
3. On the Horizon
While C&DH systems and on board processing both benefit from commercial
advances and suffer from subtleties like parts obsolescence, the overall trends
are promising. Companies like Texas Instruments and National Semiconductor
Corporation have taken note of the challenges facing spacecraft designers and
are proactively providing solutions, including guarantees of no obsolescence and
continual development. There are also a number of technologies on the horizon
that show good promise in advancing smallsat C&DH capabilities, illustrated in
Table 41.
112
Table 41: Examples of C&DH technologies on the horizon.
Technology
Name
Description Developer TRL Status Image
Collection of
networked satellites to
perform parallel or
distributed computing
Distributed
Computing
N/A
5
N/A
Central
instrument data
handling (CIDH)
Data management
system developed to
handle large data
volume
SwRI
(USA)
3
Analysis performed on
critical functions to
characterize
performance
Northrop
Grumman
(USA),
JAXA
(Japan)
Wireless bus
(bluetooth, WiFi) to
reduce bus volume
and design complexity
3
Testbed introduced for
design, build and test of
wireless spacecraft bus
Wireless bus N/A
Nonvolatile
chalcogenide random
access memory is
inherently radiation
hard utilizing
amorphous state to
store bits
Phase change
memory (PCM),
aka CRAM or
PRAM
BAE (UK),
Micron (USA),
Samsung
(South Korea),
Ovonyx (USA)
5
Completed QML-Q
testing
5
testing performed in
relevant environment.
To be flown on COVE
(2013/2014)
Xilinx Virtex-
5QV FPGA
Rad-hard
reconfiguration FPGA
Xilinx
(USA)
SpaceCube 2.0
On board data
processor, FPGA Xilinx
Virtex 5 (FX130T)
NASA
Goddard
(USA)
5
4. Conclusion
C&DH is a growing and rapidly advancing subsystem area for small spacecraft,
with increased processing power and reduced mass, power and volume. C&DH
subsystem components with the exception of memory storage devices are
typically small in size, thus are not a major driver of mass and volume. While
C&DH subsystem components draw considerable power, advancing technologies
in commercial areas are already providing promising solutions. One drawback to
fast evolving electronics is parts obsolescence (e.g. 80C32 microcontroller,
TSC21020 DSP).
113
As mentioned, the hardware solutions to satisfy performance requirements are
abundant. As such, differentiating criteria often revolve around cost, risk and
heritage. It is often the case that proven heritage components are more expensive
and less capable, while developmental units in the COTS realm are appealing for
smaller programs more willing and capable of accepting risk.
5. References
Anon.: Xilinx Virtex-5 Datasheet. [Online] 2012. Available at:
http://www.xilinx.com/support/documentation/data_sheets/ds192_V5QV_Devic
e_Overview.pdf
Bentoutou, Y.: A follow-up of in-orbit observations of radiation-induced effects in
commercial off the shelf memories on-board Alsat-1. Advances in Space Research,
Volume 48, pp. 1147-1154, 2011.
Bentoutou, Y.: A Real Time EDAC System for Applications Onboard Earth
Observation Small Satellite. IEEE Transactions on Aerospace and Electronic
Systems, 48(1), pp. 648-657, 2012.
Bentoutou, Y., Mohammed, A. S.: A Review of in-orbit Observations of Radiation-
Induced Effects in Commercial Memories on-board Alsat-1. s.l.: World Academy of
Science, Engineering and Technology, 2012.
Bingcai, C., Haifeng, X., Wei, X.: The Architecture of Picosatellite Nodes in Satellite
Formation Network Based on Reconfigurable Distributed Computing. Wireless
Communications, Networking and Mobile Computing (WiCOM). Shanghai, 2012.
Burt, Robert: Distributed Electrical Power Systems in CubeSat Applications. Utah
State University, 2012.
Conde, R. F. et al.: Benefits and Lessons Learned from the use of the Compact PCI
Standard for Spacecraft Avionics. s.l., Digital Avionics Systems Conference, 2002.
114
Furano, G.: Review of Rad Hard electronics activities at European Space Agency.
Topical Workshop on Electronics for Particle Physics (TWEPP). Oxford, UK, 2012.
Ibrahim, M. M., Asami, K., Cho, M.: Fault Tolerant Architecture Alternatives for
Developing Nano-Satellites Embedded Computers. AIAA Space Conference &
Exposition. Pasadena, CA, 2012.
Koizumi, H., Komurasaki, K., Arakawa, Y.: Development of the Miniature Ion
Propulsion System for 50 kg Small Spacecraft. 48th AIAA/ASME/SAE/ASEE Joint
Propulsion Conference & Exhibit. Atlanta, Georgia, 2012.
MacLeod, T. C., Sims, W. H., Varnavas, K. A., Ho, F. D.: Results from on-Orbit
Testing of the Fram Memory Test Experiment on the Fastsat Micro-Satellite.
Integrated Ferroelectrics, 132(1), 2012.
Norton, J. R., Cloeren, J. M.: Precision Quartz Oscillators and their use in Small
Satellites. Small Satellite Conference. Logan, UT, 1992.
Norton, J. R., Cloeren, J. M., n.d.: Precision Quartz Oscillators and their use in
Small Satellites. Johns Hopkins University Applied Physics Laboratory. Laurel,
Maryland.
Odegaard, K. A., Skavhaug, A.: Simple Methods for Error Detection and Correction
for Low-Cost Nano Satellites. SAFECOMP. Toulouse, France, 2013.
Pingree, P. J.: Advancing NASA's on-board processing capabilities with
reconfiguratble FPGA technologies: Opportunities & Implications. IEEE - Parallel &
Distributed Processing. Atlanta, GA, 2010.
Sayyah, R., Macleod, T. C., Ho, F. D.: Radiation-Hardened Electronics and
Ferroelectric Memory for Space Flight Systems. Ferroelectrics, 413(1), pp. 170-175,
2011.
Staehle, R. L. et al.: Interplanetary CubeSat Architecture and Missions. AIAA Space
Conference & Exposition. Pasadena, CA, 2012.
Wang, J. J.: Radiation effects in FPGAs. s.l., 9th Workshop on Electronics for LHC
Experiements, 2003.
115
IX. COMMUNICATIONS
1. Introduction
The majority of small spacecraft missions have a primary objective to collect
scientific data and to transmit that data back to researchers on Earth. One of the
main impediments to data collection from in-orbit and interplanetary spacecraft
is the transmission of data to and from the spacecraft. This section outlines the
current SoA in small spacecraft communication technologies and also provides
an overview of communication systems that are on the horizon.
2. State of the Art
Current small spacecraft technologies use an array of frequency bands to
communicate. The majority of spacecraft, however, tend to use the following
spectra:
Very High Frequency (VHF) 30 to 300 MHz
Ultra High Frequency (UHF) 300 MHz to 3 GHz
S Band 2 GHz to 4 GHz
X Band 8 GHz to 12 GHz
Ku Band 12 GHz to 18 GHz
K Band 18 GHz to 26.5 GHz
Ka Band - 26.5 GHz to 40 GHz
Visible (LASER Communication) 100 THz to 800 THz
The general purpose of any communication system is to maximize the data
transfer rate while minimizing hardware constraints, price, and power
consumption. These factors among others dictate the frequency spectrum that is
appropriate for a mission. This review of the current SoA technology will provide
a general overview of the hardware behind current electricity & magnetism (E&M)
communication systems. It will also encompass SoA transmitters, receivers, and
antennas. In addition, a recent survey of communication systems for all cube
satellites launched between the years 2003-2012 was conducted by Bryan Koflas
(see Appendix I).
116
The maximum amount of data that can be transmitted over electromagnetic
waves from point A to point B depends upon the signal to noise ratio (SnR) of the
system and the available bandwidth. This maximum capacity is illustrated by the
Shannon-Hartley theorem and is shown in Equation 1, where C is the maximum
data transfer rate in bits/second, B is the bandwidth of the channel in Hertz, and
SnR is the signal to noise ratio. Equation 1 is under the assumption that the
carrier frequency does not approach the data transmission rate:
! ! !!"#
!
! !!"#
(1)
To increase data transmission rates there must be an increase in available
bandwidth and SnR. Due to current utilization and government regulation,
bandwidth is limited in the microwave frequency spectrum, but is much less
restricted in the visible spectrum. SnR, however, is easily controlled by hardware
specifications and is the target of current SoA research. The SnR ratio issue is
addressed by increasing the signal strength and by finding better methods to
filter out noise.
2.1 Transmitters
Transmitters are responsible for using an input signal to modulate a carrier wave
which is then sent to an antenna. Since regulations, project budget, and expected
data throughput are important factors in selecting a carrier frequency, the
current non-exhaustive listing of SoA transmitters for each commonly used
spectrum is identified below.
2.1.1 VHF/UHF Transmitters
VHF/UHF transmitters are a reliable, low cost solution for missions requiring
nominal amounts of data transfer. These systems are typically used in LEO with
omni-directional antennas, and therefore do not require a high level of pointing
accuracy. Transceivers/transmitters in this category can cost from hundreds to a
few thousand dollars. Some examples of current application of VHF/UHF
Transmitters can be seen in REF _Ref366229518 \h \* MERGEFORMAT Table 42.
117
Table 42: Examples of SoA VHF/UHF transmitters.
Technology
Name
Description Developer TRL Status Figures
Helium radio
transmitter
UHV/VHF transmitter
Power consumption: < 6 W
Mass: ~0.1 kG
Data rate: < 38.4 kbps
Astronautical
Development
(USA)
9
Has successfully flown
on multiple missions
ISIS transceiver
VHF downlink / UHF uplink full duplex
transceiver
(transmit/receive)
Power consumption: 1.7 W/0.2 W
Mass: 0.085 kg
Data rate: < 9600 bps / < 1200 bps
Innovative
Solutions in
Space
(Netherlands)
9
Over 24 units flown
UHF/VHF
transceiver
UHF/VHF transceiver
(transmit/receive)
Power consumption: 10 W/0.25 W
Mass: 0.090 kg
Data rate: < 9600 baud / < 1200 baud
Clyde Space
(UK)
9
Has successfully flown
on multiple missions
2.1.2 S-Band Transmitters
S-Band transmitters are a popular communication system being used on recent
small satellite launches (see Table 43). These transmitters can be small enough in
size to fit into a CubeSat, and can be scaled up in larger satellites to provide data
transmission rates up to 10 Mb/s. These transmitters can range in cost from a
few thousand to a few hundred thousand dollars depending upon size and
reliability.
118
Table 43: Examples of SoA S-Band transmitters.
2.1.3 X-Band Transmitters
X-Band transmitters start to approach the high data transfer rates currently
available for fully vetted small satellite applications in the microwave frequency
spectrum. These systems represent a significant increase in data transfer rate
and system cost; this is a desirable class of transmitter for missions with large
amounts of scientific data. For examples of X-Band transmitter applications on
small spacecraft (see Table 44).
Technology
Name
Description Developer TRL Status Figures
S-Band transmitter for CubeSat
6
CubeSat S-Band
transmitter
applications
Power consumption: < 6 W
Mass: 0.08 kG
Data rate: < 2 Mbps
Clyde Space
(UK)
Integrated in Ukube-1
and preparing for
launch. Similar
components can be
found at TRL 9
High/Low mode transmitter with
switchable data rates
Surrey
S-Band
transmitter
(high/low)
Power consumption: 38 W/6 W
Mass: 1.8 kg /0.60 kg
Satellite
Technology
(UK)
Over 24
9
Units Flown
Data rate: < 10 Mbps / < 38.4 kbps
Integrated S-Band data transmitter
S-Band
transponder
and reciever.
(Receive/Transmit)
Power consumption: 5W/25W
Mass: 2.6 kg
Thales
Alenia
Space
(France)
Has
on
9
successfully flown
multiple missions
Data rate: < 2 Mbps / < 8 Mbps
Integrated S-Band data transmitter
and reciever.
S-Band
transceiver
(receive/transmit)
Power consumption: 4 W/14 W
COM DEV
EUROPE
(UK)
Has
on
9
successfully flown
multiple missions
Mass: 0.78 kg
Data rate: < 1 Mbps / < 6.25 Mbps
119
Table 44: Examples of SoA X-Band transmitters.
Technology
Name
Description Developer TRL Status Figures
X-band transmitter for small
satellite applications
Power consumption: 120 W
Mass: 4.0 kg
Data rate: < 500 Mbps
Surrey
Satellite
Technology
(UK)
9
Has successfully
flown on multiple
missions
X-Band
transmitter
X-band transmitter for small
satellite applications
Power consumption: <90 W
Mass:3.9 kg
Data rate: < 400 Mbps
X-Band
transmitter
L-3 Cincinnati
Electronics
(USA)
9
Has successfully
flown on multiple
missions
Low power low mass option
Power consumption: 10 W
Mass: 0.4 kg
Data rate: < 50 Mbps
X-Band
transmitter
Syrlinks
(France)
6
2.1.4 K-Band/Ka-Band/Ku-Band Transmitters
The Ku-band spectrum is used primarily by fixed and broadcast services such as
satellite television. Space shuttle communication systems and the ISS also use
the Ku-band frequency for scientific ventures. Communication satellites most
commonly use the Ka-band frequency, and the Kepler Mission uses a Ka-band
transmitter to send scientific data. Table 45 shows some examples of SoA
K/KA/KU-Band transmitters that are space qualified.
120
Table 45: Examples of SoA K,Ku,Ka-Band transmitters.
Technology
Name
Description Developer TRL Status Figures
State of the art Ka-Band
transmitter
(receive/transmit)
Power consumption: N/A
Mass: 2.7 kg
Data rate: < 3 Gbps
3
Still scaling up
performance to meet
specifications
Ka-Band
transmitter
Space Micro
(USA)
Ku-band transmitters with Ka-
band and X-band options
Power consumption: 47 W
Mass:2.26 kg
Data rate: < 150 Mbps
Ku-Band
transmitter
General
Dynamics
(USA)
9
Has flown succesfully
Integrated S-Band data
transmitter and Reciever.
Power consumption: 30 W
Mass: 2.8 kg
Data rate: < 1.2 Gbps
K-Band
transmitter
L-3 Telemetry
West
(USA)
6
Tested in similar
environment
2.1.5 Infrared/Visible Spectrum Transmitters
Laser communication systems have been explored extensively for ground-based
communication systems, but they are now starting to be explored as an option
for in-orbit and interplanetary spacecraft missions. LASER communication
systems can transfer large amounts of data with a significant decrease in power
requirements and hardware mass from traditional microwave band-based
communication systems.
The basic principle behind a LASER communication system is that a high-
powered laser is incident upon an optical receiver. Due to little beam divergence
and how well the laser signal can be collimated, the amount of power required to
transmit a signal is reduced in comparison to radio wave-based communication
121
systems. Because the signal is so directional, these systems produce almost no
interference with other communication systems and pose little threat to
congesting the spectrum like many other frequency bands have done.
This technology is being developed for ground-to-spacecraft, spacecraft-to-
ground, and spacecraft-to-spacecraft systems. LASER communication systems
look to be an exciting new field in the small spacecraft communications sector;
Table 46 provides current information.
Table 46: An example of visible/infrared transmitters.
Technology
Name
Description Developer TRL Status Figures
LADEE laser communication
demonstration, data rates from
moon orbit.
Power consumption: 50-140 W
Mass: 30 kg (PPM/DPSK)
Data range: <625 Mbps/<2.88
Gbps
6
Launched on LADEE;
Demonstrated in
2013
Infrared/visible
transmitter
NASA/Loral
(USA)
2.2 Antennae
2.2.1 Deployable Antennae
High gain deployable antennae are of keen interest to many small spacecraft
missions. Table 47 is a sampling of standardized deployable antennae available
to small spacecraft.
122
Table 47: Examples of SoA deployable antennae for small spacecraft.
Technology
Name
Description Developer TRL Status Figures
A deployable antenna for
cube satellite missions. Can
deploy four monopole
antennae.
Max RF power: 2 W
Mass: 0.10 kg
Deployable
UHF/VHF
antenna
Innovative
Solutions in
Space
(Netherlands)
9
Flown on multiple
successful missions
A deployable high gain
antenna for cube satellites.
Max gain: 18 dBi
Mass: 1.0 kg
Deployable
high gain
antenna
BDS
Phantomworks
(USA)
6
A deployable high gain
antenna for cube satellites.
USC's Space
Engineering
Research
Center (SERC),
(USA)
Deployable
high gain
antenna
9
Launched succesfully
on Aeneas CubeSat
Max gain: 15 dBi
Half angle: 11
o
Mass: 1.0 kg
2.2.2 Integrated Pointing Systems
The current integrated pointing systems available provide a fully integrated
system for a high gain antenna combined with accurate pointing units. The
required accurate pointing technologies are not a main focus of this survey, but
an example of a currently available product in this field can be found in Table 48.
Table 48: Examples of SoA integrated pointing systems for small spacecraft.
Technology
Name
Description Developer TL Status Figures
Integrated
pointing high
gain antenna
This technology provides a
complete integrated system
for a high gain antenna
combined with a pointing
unit accurate to 0.25
o
Surrey
Satellite
Technology
(UK)
9
Flown on NigeriaSat-2
123
2.2.3 Microstrip/Patch Antennae
There appears to be an increased use of Microstrip and Patch antennae in
spacecraft communication systems. The reason for this is the microstrip and
patch antenna are meant to minimize the mass and size requirements of a
standard antenna while still maintaining good signal strength output. Microstrip
and patch antennae are currently commercially available for a variety of
frequency spectrums including the popular S-Band and X-Band (see Table 49).
Table 49: An example of patch antennae for small spacecraft.
Technology
Name
Description Developer TL Status Figures
S-Band patch
antenna
X-band transmitter for small
satellite applications
Half power angle: 70
Mass: 0.08 kg
Gain: < 7 dBiC
Surrey
Satellite
Technology
(UK)
9
Over 70 units flown
3. On the Horizon
There are many promising technologies in communication systems that are
currently under development. These technologies cover a wide span of
applications including novel transmitters, high gain antenna, and the use of
additional frequency spectrums. The technology detailed is not an exhaustive
list, but should provide a general idea of the areas of interest in current small
spacecraft communication systems.
3.1 Ka-Band Transmitters
The Ka-band has the potential for even faster data transfer rates and products
are currently in development to tap the large bandwidth the Ka-band has to
offer. Table 50 is just one sample of upcoming Ka-band transmitters.
124
Table 50: Example SoA Ka-Band transmitters.
Technology
Name
Description Developer TRL Status Figures
State of the art Ka-Band
transmitter
Ka-Band
transmitter
(receive/transmit)
Power consumption: N/A
Mass: 2.7 kg
Data rate: < 3 Gbps
Space Micro
(USA)
3
3.2 Modulating Retro Reflectors
In an effort to reduce the power and mass load requirements placed on small
spacecraft by their communication systems, research is being done to move
much of that load from the satellite to the ground station. A high-powered laser
from a ground station applies a pulse to a satellite; the satellite then modulates
the incoming pulse and reflects it back to a ground station. This scheme provides
two-way laser communication, but with all of the laser power provided by the
ground stationthe spacecraft communication subsystem, power, mass, and
volume are very small, consisting only of the laser receiver and modulating retro
reflector.
Table 51: Modulating retro reflector.
Technology
Name
Description Developer TRL Status Figures
Modulating retro reflectors are
attached to satellites which can
modulated a groundbased
signal and reflect it to transmit
data. Designed for
visible/ifrared spectrum.
Modulated
retro reflectors
NASA
(USA)
2-3
125
3.3 Integrated Solar Panel Reflect Arrays
Integrated solar panel reflect arrays aim to increase the data downlink rate for
small spacecraft by several orders of magnitude by acting as a high gain antenna
(see Table 52). This technique can be incorporated with minimal additional cost,
mass, and volume as compared to a stand-alone high gain antenna. This
technology is ideal for CubeSats or similar-sized spacecraft. A five month in-orbit
small satellite mission, ISARA, is currently in the planning stages to validate this
design.
Table 52: Integrated solar panel reflect array.
Technology
Name
Description Developer TL Status Figures
Integrated solar
panel reflect
array
Using solar panels to reflect
and concentrate radio waves to
achieve higher data transfer
rates
NASA JPL
(USA)
2-3
3.4 X-Ray Communication
Research is being conducted into communication systems using the X-ray
frequency spectrum. Among other benefits, X-ray communication systems could
overcome the re-entry communication blackout period (see Table 53). Lab
demonstrations have created a digital data link > 1 Mbps. Additional in-orbit
testing is currently being pursued
Table 53: X-Ray Communication.
Technology
Name
Description Developer TRL Status Figures
Communication using the X-
ray frequency spectrum. Lab
testing has been conducted
with succesful digital links up
to 1 Mbps
X-Ray
communication
NASA
(USA)
3
4. Conclusion
The microwave frequency spectrum is currently highly developed for use in
satellite communication systems. Current trends in this area involve using high
gain antennae with high pointing precision to transmit large amounts of data.
The microwave spectrum however, is becoming quite congested and so the use of
other spectrums, such as visible, seems promising. Optical communication
systems are an area of heavy research and development at the moment and have
the potential to provide increased data transfer rates with nominal bandwidth
pollution compared to the microwave frequencies. Figure 50 below depicts the
maximum achievable data transfer rates for different frequency spectrums. In
spite of the early development stage, optical communication is already
surpassing traditional transmitters.
!" References
Astronautical Development: AstroDev Helium Radios. [e-book] Astronautical
Development, 2009.
$
$%
$%%
$%%%
$%%%%
$%%%%%
$%%%%%%
$%%%%%%%
&'()*'( +,-./0 1,-./0 2,-./0 *343567
2FGF ,FGHI JKLMIN
8.9. :.974 ;<5=4>
Figure 50: Data rates for frequency bands.
126
http://www.astrodev.com/public_html/downloads/datasheet/Helium-
Specification.pdf [Accessed: 20th August, 2013].
127
BDS Phantom Works: Miniature Deployable High Gain Antenna. [e-book] BDS
Phantom Works,
2011. http://mstl.atl.calpoly.edu/~bklofas/Presentations/DevelopersWorkshop2011
/47_MacGillivray_Miniature_Antennas.pdf [Accessed: August 20th, 2013].
Cincinnati Electronics: T-724A HIGH DATA RATE X-BAND TRANSMITTER. [e-book]
Cincinnati Electronics, 2013. Available at:
http://www.cinele.com/images/space_datasheets/t-724a_x-band.pdf
[Accessed: August 20th, 2013].
Cincinnati Electronics: T-720 TRANSMITTER. [e-book] Cincinnati Electronics,
2007. http://www.cinele.com/images/space_datasheets/t-720.pdf [Accessed: August
20th, 2013].
Clyde-space.com: CPUT CMC: UHF/VHF Transceiver, Communication Systems
CubeSat. [online] 2013. Available at:
http://www.clyde-space.com/CubeSat_shop/communication_systems/170_cmc-uhf-
vhf-transceiver [Accessed: 26 Aug 2013].
Clyde-space.com: CPUT CubeSat S-Band Transmitter, Communication Systems
CubeSat. [online] 2013. Available at:
http://www.clyde-space.com/CubeSat_shop/communication_systems/301_CubeSat-s-
band-transmitter [Accessed: 26 Aug 2013].
COM DEV EUROPE: S-Band TT&C Transceiver. [e-book] COM DEV EUROPE,
2010. http://www.comdev.ca/docs/TTC Data sheet V2-10.pdf [Accessed: August
20th, 2013].
Klofas, Bryan: CubeSat Developers' Workshop 2013. [online] 2013. Available at:
http://mstl.atl.calpoly.edu/~bklofas/Presentations/DevelopersWorkshop2013/
Klofas, Bryan: CubeSat Developers' Workshop 2008. [online] 2008. Available at:
http://mstl.atl.calpoly.edu/~bklofas/Presentations/DevelopersWorkshop2008/
CubeSatshop.com: ISIS VHF downlink/UHF uplink Full Duplex Transceiver. [online]
2012. Available at:
http://www.CubeSatshop.com/index.php?page=shop.product_details&category_id=5
128
&flypage=flypage.tpl&product_id=73&option=com_virtuemart&Itemid=67 [Accessed:
26 Aug 2013].
Directory.eoportal.org: LADEE - eoPortal Directory - Satellite Missions - Earthnet
Online. [online] 2011. Available at:
https://directory.eoportal.org/web/eoportal/satellite-missions/l/ladee [Accessed: 26
Aug 2013].
Gendreau, K.: X-Ray Comm. [email] Sent August 15th, 2013.
General Dynamics: Ku/Ka/X-Band High Rate Transmitter (HRT150). [e-book] General
Dynamics, 2012.
http://www.gd-ais.com/Documents/High Rate Transmitter (HRT150).pdf [Accessed:
August 20th, 2013].
Innovative Solutions In Space: Deployable UHF and VHF antennas. [e-book] Innovative
Solutions In Space,
2013. http://www.isispace.nl/brochures/ISIS_AntS_Brochure_v.7.11.pdf [Accessed:
August 20th, 2013].
L3 Telemetry West: K-Band OQPSK Transmitter. [e-book] L3 Telemetry West,
2012. http://www2.l-3com.com/tw/pdf/datasheets/ML601_Rev D.pdf [Accessed:
August 20th, 2013].
NASA JPL. n.d.: ISARA - Reflectarray Antenna for High Bandwidth Communications.
[e-book] NASA JPL. http://www.nasa.gov/pdf/706631main_sstp_3_projects.pdf
[Accessed: August 20th, 2013].
Salas, A., Stupl, J. and Mason, J.: Modulating Retro-Reflectors: Technology, Link
Budgets And Applications. 63rd International Astronautical Congress, 2013.
[Accessed: 27 Aug 2013].
Space Micro: !Tx-300 Ka-Band Transmitter. [e-book] Space Micro,
2013. http://www.spacemicro.com/pdfs/KA-Band v5.0.pdf [Accessed: August 20th,
2013].
Sstl.co.uk. n.d.: High Gain X-Band Antenna Pointing Mechanism. [online] Available at:
http://www.sstl.co.uk/Products/Subsystems/Communication/Antennas/High-Gain-
X-Band-Antenna-
129
X. INTEGRATION, LAUNCH AND DEPLOYMENT
1. Introduction
The current development of small spacecraft integration, launch, and
deployment systems has largely been focused on leveraging existing launchers
for much larger vehicles. To reduce costs, small spacecraft are often allocated a
chunk of the mass margin leftover after the primary mission defines most launch
criteria. In this paradigm, small spacecraft are certainly not the drivers of launch
requirements and are usually designed explicitly for minimal interference to the
primary mission. As small spacecraft grow increasingly popular and capable,
launch vehicles, integration, and deployment systems must meet the challenges
of rising demand and capabilities. SoA technologies in these areas are
responding to the changing small spacecraft market to support new, advanced
missions with diverse technologies that will take small spacecraft further into
both space and the future.
SoA launch vehicles such as the Evolved Expendable Launch Vehicle (EELV)
boosters were not originally designed for hosting small payloads. Since launch
vehicles rarely match the exact capabilities needed by the primary customer,
there is usually enough leftover mass, volume, and other performance margins
available for delivery of small spacecraft. Small spacecraft can share this free
space for a cheap ride to space. A large market of adapters and deployment
technologies has been created to compactly house multiple small spacecraft on
these heritage launchers. These technologies provide both a secure attachment to
the launcher as well as mechanisms for departure at the appropriate time. In the
future, though, the expanding capabilities of small spacecraft payloads will
demand a dedicated launcher. For missions that need a very specific science
orbit, interplanetary trajectories, precisely timed rendezvous, or special
environmental considerations, flying the spacecraft as a primary payload may be
the best method of ascent. Highly capable host spacecraft will provide greatly
expanded capabilities to large launchers as well. Through innovative dedicated
launchers or integration mechanisms, the mission envelope for small spacecraft
can be greatly expanded. This will enable fields from technology development to
130
hard sciences to take advantage of the
quick iteration time and low capital cost of
small spacecraft to yield new and exciting
advances in space capabilities and
understanding.
2. State of the Art
2.1 $%&'() *+),(-+.
2.1.1 Primary Payloads
The primary payload market for small
spacecraft is currently very limited. To
date, only a few modern vehicles are
available specifically for small spacecraft.
Since the growth in popularity of small
spacecraft is a recent development, a robust market of small launchers has not
yet developed. Of the vehicles on the market, though, the Super Strypi/SPARK
(Spaceborne Payload Assist Rocket; see Figure 51) rocket has TRL value of 9 and
is a promising technology. Developed jointly by the Innovative Satellite Launch
Program at the University of Hawaii in cooperation with Sandia National
Laboratories and Aerojet, SPARK is an evolved version of Sandias Super Strypi
research rocket that is designed to deliver 250 kg to a 400 km Sun-synchronous
orbit from Kauai, Hawaii. It is designed to integrate payloads with the NASA
Ames payload adapter and deployer. Launch of a 1U spacecraft is anticipated to
be only ~$40-60K, and launch of a 12U is ~$1.5M (Taylor, 2013). The first launch
is planned for October 2013 (David, 2013).
The Pegasus, an air-launched vehicle built by Orbital Sciences, is a small- to
medium-lift launcher that has already built a heritage of successful launches
since 1996. The system can deliver 450 kg to LEO with three solid stages. The
rocket has a record of 26 consecutive fully successful missions including the
recent NASA Interface Region Imaging Spectrograph (IRIS) mission launched in
June 2013 aboard a Pegasus XL variant (NASA, 2013). This system allows greater
Figure 51: The Super Strypi and SPARK
launchers (Brgge, n.d.).
131
mobility and flexibility in launch since the rocket is launched from a carrier
aircraft (Orbital Sciences, 2013).
Another vehicle produced by Orbital Sciences, the Minotaur, is the last medium-
lift launcher currently available to be considered as a SoA primary payload
launch vehicle. With a payload capacity of 580 kg to LEO, the Minotaur would be
overkill for most small satellite missions, but could still be valuable depending
on destination and number. Out of the entire rocket family, the Minotaur I is the
most applicable to small satellites since it has the lowest payload and cost, and
has conducted ten missions successfully. The Minotaur I is designed with four
solid stages from a converted Minuteman ballistic missile (Orbital Sciences,
2013).
Table 54: Examples of SoA primary launch vehicles for small spacecraft.
Technology
Name
Description Developer TRL Status Figures
Minotaur
Rocket family
currently with 580 kg
to LEO (Minotaur I)
and 437 kg to TLI
(Minotaur V)
Orbital
Sciences
(US)
9
First launch of family
in 2000; launch of
Minotaur V in 2013
Pegasus
Air-launched, three-
stage orbital vehicle
with up to 450 kg to
LEO
Orbital
Sciences
(US)
9
Launched successful
IRIS mission; 26
consecutive fully
successful missions
Satellite launch
vehicle VLS-1
380 kg to LEO; three-
stage solid, eventual
evolution to some
liquid stages
Brazilian Space
Agency (AEB),
with Russian
assistance
(Foreign)
6
Multiple tests of
vehicle, but no
successfully flown
missions yet
Super Strypi
Small, three-stage, all-
solid orbital
expendable launcher
with 250 kg payload
to 400 km SSO
University of
Hawaii, Sandia,
Aerojet
(US)
7
Will fly HiakaSat by late
2013
NLSP nano-sat
launcher (NEXT
program)
15 kg to 425 km
minimum specs
NASA Launch
Services;
Contractor not
yet selected (US)
6 or higher
Draft RFI prepared at
http://prod.nais.nasa.go
v/eps/eps_data/156837-
DRAFT-001-001.pdf
N/A
132
2.1.2 Secondary Payloads
Secondary payload arrangements provide far more options for immediate launch
at high TRL. Workhorse vehicles like the Atlas V and Soyuz now carry secondary
payloads as regular course. Since almost any large launcher can fit a small
payload within mass and volume margins, there is no shortage of options for
craft that want to fly as a secondary. Even on small vehicles like the Super
Strypi/SPARK, there is often enough extra performance to squeeze in at least a
1U CubeSat.
The EELV programs boosters, the Atlas V and Delta IV, have been the most
common and capable secondary launchers for small spacecraft programs to date.
The EELV Secondary Payload Adapter (ESPA ring) has flown everything from
larger payloads like the NASA LCROSS mission to several small CubeSats in Poly
Picosatellite Orbital Deployers (P-PODs). With a diverse family of launchers and a
fully developed integration and launch services scheme, the EELVs are the most
successful small spacecraft launchers currently available.
The Atlas V (see Figure 52) can deliver from approximately 9,800 kg to almost
19,000 kg into a 200 km LEO orbit at 28.7#
depending on configuration. The Atlas
program enjoys a long heritage reaching
back over 600 launches, and the Atlas V has
been 100% successful since its introduction.
The Delta IV is a heavier lift EELV that can
deliver from approximately 9,200 kg to over
28,000 kg to a 200 km LEO orbit at 28.7#
depending on configuration. Although the
Delta IV does not share the same long flight
history as the Atlas, it provides good
opportunities for secondary launches due to
its extreme payload capability (United
Launch Alliance, 2013).
Figure 52: Atlas V with the LCROSS and
LRO payloads (Atkinson, 2009).
133
The Falcon family of rockets from Space Exploration Technologies (SpaceX) is
proving to be another valuable asset to the small spacecraft community as well.
SpaceXs only current launcher is the Falcon 9, a two-stage LOX/RP-1 vehicle
capable of lifting over 13,000 kg to LEO. SpaceXs contracts with NASA to provide
cargo services and eventually crewed missions to the International Space Station
means those opportunities to rideshare will continue into the far future. All five
launches to date have been successful. SpaceX is currently redesigning the
vehicle to yield higher performance and lower costs, and plans to achieve at least
partial reusability which could dramatically lower costs for all spacecraft
(Technologies, Space Exploration, 2013).
Foreign vehicles such as the Soyuz and Dnepr-1 are also viable competition in the
market. Like the Atlas, Soyuz also enjoys a long heritage and is one of the most
popular launchers in the world. Both Soyuz and Dnepr-1 are designed and built
in Russia. The Soyuz is the only current launcher for human crews to the ISS.
Table 55: Examples of SoA secondary launch vehicles for small spacecraft.
Technology
Name
Description Developer TRL Status Figures
Antares
Two-stage launcher
with solid and liquid
stages for payloads
over 5,000 kg to LEO
Orbital Sciences
(USA)
9
Launcher for successful
PhoneSat mission
Ariane 5
European civilian
launcher family;
current Ariane 5 is
heavy lift vehicle
capable of 20,000 kg to
LEO
European Space
Agency
(Foreign)
9
Ariane 1 first
operational in 1979;
Ariane 5 first
operational in 1996
Atlas V
Evolved expendable
9,800-18,850 kg to LEO;
multiple secondary
payloads aboard ESPA
ring
United Launch
Alliance
(USA)
9
Hot Bird 6 first launch;
has flown several
CubeSats and other
small satellites since
134
Delta II
2,700 kg - 6,100 kg to
LEO; two-stage liquid
with option third
stage
United Launch
Alliance
(USA)
9
First launch in 1989
Delta IV
Rocket family with
medium- and heavy-
lift options; 8,600 kg -
22,560 kg to LEO
United Launch
Alliance
(USA)
9
First launch in 2002
Dnepr-1
4,500 kg to LEO; three-
stage, hypergolic
Yuzhny
Machine-
Building Plant
(Foreign)
9
First launch in 1999
Falcon 9
13,150 kg to LEO;
ongoing design for
reusability; LOX/RP1
two-stage booster
Space
Exploration
Technologies
(USA)
9
First launch 2010
Falcon heavy
53,000 kg to LEO;
ongoing design for
reusability; LOX/RP1
two-stage booster
Space
Exploration
Technologies
(USA)
7
Multiple Falcon 9 core
flights for NASA
COTS/CRS missions
H-IIA/B
10,000 kg (H-IIA) -
16,500 kg (H-IIB) to
LEO
Mitsubishi
Heavy
Industries
(Foreign)
9
First launch of H-IIA in
2001
International
Space Station
Hand-launch or P-POD
deployment for
CubeSats
ISS Partners;
launcher for
CubeSats on
JEM (Japanese
Experiment
Module) (Mixed)
9
J-SSOD deployed
multiple CubeSats on
Expedition 33
Kosmos-3m
1,500 kg to LEO;
IRFNA/UDMH-fueled
two-stage
Yuzhnoye/NPO
Polyot
(Foreign)
9
First flight in 1967
Long March
Widely varies;
currently 2,400 kg -
11,200 kg to LEO
China Academy
of Launch
Vehicle
Technology
(Foreign)
9
First of family launched
in 1970; most recent
launch of taikonauts in
June 2013
135
Minotaur
Rocket family
currently with 580 kg
to LEO (Minotaur I)
and 437 kg to TLI
(Minotaur V)
Orbital Sciences
(USA)
9
First launch of family in
2000; launch of
Minotaur V in
September 2013
Pegasus
Air-launched, three-
stage orbital vehicle
with up to 450 kg to
LEO
Orbital Sciences
(USA)
9
Launched successful
IRIS mission; 26
consecutive fully
successful missions
PSLV
3,250 kg to LEO
(standard)
Indian Space
Research
Organization
(Foreign)
9
First flight 1993
Rokot-KM
1,950 kg to LEO; three-
stage, liquid
Eurockot
Launch Services
(Foreign)
9
First flight in 1990
Soyuz
Rocket family; three-
stage LOX/RP1 with
7,100 - 7,800 kg to LEO
OKB-1, TsSKB-
Progress
(Foreign)
9
Large heritage of
missions; currently
only man-rated
launcher to ISS; first
flight in 1966
Space Launch
System
Initially 70,000 kg to
LEO, evolved to
130,000 kg
Boeing, ATK,
Pratt & Whitney
Rocketdyne,
NASA, and
others
(USA)
7
First flight scheduled
for 2017; significant use
of shuttle-derived
components
Super Strypi
Small, three-stage, all-
solid orbital
expendable launcher
with 250 kg payload to
400 km SSO
University of
Hawaii, Sandia,
Aerojet
(USA)
7
Will fly HiakaSat by late
2013
Taurus
1,320 kg to LEO; four
solid stages
Orbital Sciences
(USA)
9
First launch in 1994, but
notable recent failures
Vega
European small
launcher with 300-
2,500 kg primary
payload and up to 9
CubeSats; reference
mission is 1,500 kg to
700 km polar orbit
European Space
Agency
(Foreign)
9
CubeSats flown in 2007
on maiden flight of
vehicle
136
2.2 Payload Adapters and Deployment
Currently no launch vehicle dedicated to payloads less than 180 kg is available,
thus most small satellites must ride as secondary payloads. In order to
accommodate this class, and in order to fully use available payload space on
launch vehicles, adapters have been created to store, isolate and deploy
secondary payloads. A broad spectrum of adapters exists to serve payloads of
different sizes, as shown in Figure 53.
Figure 53: Examples of secondary payload adapters available to serve payloads of various masses,
ranging from nanosatellites to minisatellites (image credit: United Launch Alliance).
2.2.1 Nanosatellites 0-10 kg
The nanosatellite class is dominated by CubeSats. Although the CubeSat
architecture does not strictly limit spacecraft mass to be less than 10 kg, to-date
CubeSats missions have fit within this range. While nanosatellites exist outside
the form factor of the CubeSat, they require individualized adapters. Therefore
the focus of this section is on integration systems conforming to the CubeSat
architecture.
137
The CubeSat form lends itself to container based
integration systems. While several systems exist, the
standard deployer is the Poly Picosatellite Orbital
Deployer, or P-POD, named for California Polytechnic
State University where it was originally developed.
The P-POD is a rectangular 7075-T73 aluminum
container which can hold up to 10 x 10 x 34 cm of
deployable spacecraft, either three 1U CubeSats or one
3U CubeSat, or a mix of intermediate sizes. The
container acts as a Faraday cage, so hosted payloads
meet electromagnetic compatibility (EMC) standards.
Deployment is achieved by a pusher plate and spring
ejection system. The main driver spring is aligned with
the central axis of the P-POD (see Figure 54. If more than
one satellite is loaded, additional spring plungers placed
between CubeSats are used to provide initial separation between payloads. The
interior is anodized with a Teflon-impregnated solution to ensure smooth
deployment. The tubular design of the P-POD prevents rotation of the CubeSats
during ejection, ensuring linear trajectories. The exit velocity of the CubeSat is
designed to be 1.6 m/s, though the central spring may be replaced to achieve
different exit velocities (Lan, 2007). Typically P-PODs are connected to a larger
secondary payload interface and not directly to the launch vehicle (see
Microsatellites and Minisatellites subsections for more information).
Other POD designs exist, though the systems are essentially the same as the P-
POD. Such systems include T-POD, X-POD, ISIPOD, and EZPOD. Details on these
technologies may be found in Table 56. One should note these deployers are not
necessarily competitors to the P-POD, but rather exist to provide various
organizations rideshare opportunities when room for secondary payloads opens
on launch vehicles (Kramer, 2012).
Figure 54: P-POD ejection
spring. Ref:
http://rjwagner49.com/Per
sonal/Work/Mayflower/.
138
Table 56: Examples of SoA 1-3U POD deployers for small satellites.
Developer
Technology
Name
Description TRL Status Figures
9
Successfully deployed 4
CubeSats from
Eurockot in 2003
Tubular container
which deploys up to
3U CubeSats
Spaceflight,
Inc.
(USA)
P-POD
9
Successfully used to
deploy XI-V CubeSat in
2003
University of
Tokyo
(Japan)
Adapter used to
deploy a 1U CubeSat
T-POD
Customizable adapter
which deploys up to
14kg, inlcuding
CubeSat standard
UTIAS Space
Flight
Laboratory
(Canada)
9
Successfully used to
deploy CubeSats on
ISRO PSLV-C9 in 2008
X-POD
9
3U ISIPOD successfully
deployed Cosmogia's
Dove-1 and Dove-2
spacecraft in 2013
CubeSat launch
adapter capable of
carrying 1, 2 and 3 U
CubeSats
ISIS
(Netherlands)
ISIPOD
Andrews
Space, Inc. and
ISIS,
(USA and
Netherlands)
9
Successfully used to
deploy STRanD-1
CubeSat in 2013
US version of ISIPOD,
6U and 12U versions
in development
EZPOD
9
Successfully deployed
CubeSats including
RAIKO, FITSAT-1, WE
WISH, NanoRacks
CubeSat-1/F-1 and
TechEdSat
Japan
Aerospace
Exploration
Agency (JAXA),
(Japan)
Deploys up to 6 1U
CubeSats from the ISS
J-SSOD
8
System has been tested
on zero gravity and sub-
orbital flights. First
mission will be the
BarnacleSat Mission
1U CubeSat deployer
based on RocketCam
system
Ecliptic
Enterprises
(USA)
Rocket Pod
139
Ecliptic Enterprises developed an approach for carrying CubeSat secondary
payloads on the exterior of rockets. The device, known as RocketPod, may also
be mounted on the interior of the payload fairing or on adapter rings such as
ESPA and CAP (see Microsatellites and Minisatellites subsections). RocketPod
uses mechanical and electrical interfaces flight proven on Ecliptics RocketCam.
Like the P-Pod, ejection is achieved via a spring-loaded mechanism (Caldwell &
Ridenoure, 2005).
In addition to deploying from a launch vehicle as a secondary payload,
nanosatellites may also be deployed from the ISS via the Japanese Experiment
Module (JEM) Small Satellite Orbital Deployer (J-SSOD). Like previous deployers,
ejection is achieved via a compressed spring mechanism and guide rails (IHI
Aerosapce, 2012).
As CubeSats grew in popularity, demand increased for integration systems
allowing for larger CubeSat payloads, as well as more CubeSats per launch. To
accommodate this demand, a variety of 6U-capable deployers based on the P-POD
were developed, including Wallops 6U deployer, Planetary Systems Canisterized
Satellite Dispenser (CSD), Andrews 6U EZPOD, and NASA Ames NanoSat Launch
Adapter System (NLAS). While these systems have yet to fly, all have been tested
in a relevant environment and achieved a TRL of at least 6. As a secondary
payload adapter system, not merely a deployer, NLAS has the additional
advantage of carrying a large number of CubeSats, up to a total of 24U (Ames,
2013).
Like NLAS, the Naval Postgraduate Schools CubeSat launcher (NPSCul) is capable
of carrying large numbers (up to 24U) of CubeSats to orbit. While NLAS is a
stand-alone adapter system, NPSCul requires an additional secondary payload
adapter to interface with the launch vehicle. The capabilities of the
aforementioned systems are highlighted in Table 57.
140
Table 57: Examples of SoA 6U+ deployment systems.
Technology
Name
Description Developer TRL Status Figures
Goddard
Space Flight
Center/
Wallops Flight
Facility
(USA)
6
Vibration and
deployment testing in
relevant environmnet
Wallops 6U
CubeSat
deployer
CubeSat deployer
capable of holding 6U
CubeSats
Planetary
Systems
Corporation
(USA)
Canisterized
Satellite
Dispenser (CSD)
CubeSat dispenser
capable of deploying
3U and 6U payloads
6
Qualified to MIL-STD-
1540 level
NASA Ames
Research
Center
(USA)
6
Qualified using the
General Environmental
Verification Standards
Deploys 1, 3 and 6 U
CubeSats, up to a total
of 24U.
NLAS
Naval
Postgraduate
School
(USA)
Adapter used to carry
8 P-PODs, or up to 24U
volume of CubeSats
9
Deployed 11 CubeSats
for OUTSat mission
NPSCul
2.2.2 Microsatellites 10-100 kg
Payloads in the microsatellite class have fewer dedicated integration systems.
While a few adapters specifically targeted to this mass range exist, most payloads
of this class must be designed to fit with minisatellite class integration systems.
Indeed, integration systems specifically targeted towards microsatellites, such as
the Aft Bulkhead Carrier (ABC), often evolved out of unique situations.
When redesigning the Atlas V Centaur upper stage pressure system, the Office of
Space Launch (OSL) replaced three helium tanks with two larger tanks leaving a
volume 50.8 x 50.8 x 76.2 cm at the aft end of the upper stage. OSL seized the
141
opportunity to convert this excess volume into secondary payload space. This
location offers several advantages despite its proximity to the upper stage
thruster, namely the secondary payload is completely isolated from the primary,
thereby relaxing electromagnetic interference and contamination concerns of the
primary payload. OSL designed the ABC (see Figure 55) to host payloads in this
space. The adapter carries up to 80 kg by utilizing the plate and struts previously
used to house the helium tank (Willcox, 2012).
Figure 55: Aft Bulkhead Carrier (Willcox, 2012).
Another adapter, originally used to house batteries, has been converted into
secondary payload volume. The C-Adapter Platform (CAP) is a cantilevered
platform capable of carrying up to 45 kg in a volume of 23 x 31 x 33 cm. The
platform is attached to a C-adapter ring via a 20.3 cm clampband and is
compatible with Atlas V and Delta IV launch vehicles (Szatkowski, 2013). C-rings,
mounted in the forward adapter of the Centaur upper stage, are essentially large
aluminum rings used as an interface between payload integration systems and
ground support equipment (ULA, 2010).
Table 58: Microsatellite secondary payload adapters.
142
2.2.3 Minisatellites 100-180 kg
To use additional payload space on the EELV, the Air Force Research Laboratory
Space Vehicles Directorate (AFRL/VS) contracted Moog CSA Engineering to
develop what has become known as an ESPA ring, or EELV Secondary Payload
Adapter. The original ESPA was designed to carry a 6,800 kg primary payload and
up to six 180 kg secondary payloads (Goodwin & Wegner, 2001). Although
initially designed to be compatible with the Atlas V and Delta IV launch vehicles,
the adapter is also compatible with the Taurus II launch vehicle. Additionally,
SpaceX has recently made an agreement with Spaceflight Inc. to host secondary
payloads using Spaceflights Secondary Payload System (SSPS), which has at its
core an ESPA ring (Bergin, 2012).
ESPA is a ring of 7070 T7451 aluminum with six equally spaced 38 cm diameter
bolt circles used to attach six secondary payloads. ESPA sits between the launch
vehicle upper stage and the primary payload, where rings may be stacked to
accommodate more secondary payloads. Each secondary is allowed to occupy a
maximum volume of 61x61x96.5 cm with a 50.8 cm center of gravity
requirement (Goodwin & Wegner, 2001). The deployment is left to the payload
designers, but the ejection system and the payload together must fit within the
size and mass constraints. Any payload that fits within these constraints and is
compatible with the 38 cm bolt circles may ride as a secondary on ESPA,
including the CubeSat deployers discussed previously. In addition to providing a
physical link to the launch vehicle, the ESPA system also accommodates an
electrical interface between launch vehicle and payload to provide power.
Moog CSA also developed the ESPA Six Unit Mount (SUM), which allows for the
addition of up to 12 3U satellites. ESPA SUM makes use of the interior portion of
the adapter ring to house either two 3U P-PODs or one 6U deployer behind each
38.1 cm port, in addition to the six 180 kg payloads (Moog, 2013). CubeSat
deployers may be mounted internally or externally as shown in Figure 56. If
mounted externally, then a total of 24 3U CubeSats may be deployed from the
ESPA SUM, using CSD and P-POD deployers.
143
Figure 56: (Left) ESPA SUM with interior mounted CubeSats and (right) exterior mounted (Marin, n.d.).
To support payloads on the Minotaur launch vehicle, Orbital Sciences
Corporation developed the Multiple Payload Adapter Plate (MPAP), a flat plate
adapter capable of holding up to four 180 kg payloads in a volume of 90.2 x 78.1
x 61 cm (Orbital Sciences, 2013). Plate adapters are
used in conjunction with other payload adapters to
increase the overall secondary payload space. Moog
CSA has developed a similar adapter, known as the
Spiderman Adapter, to interface with ESPA rings. The
adapter, seen in Figure 57, holds two 180 kg payloads
(Pendleton, et al., n.d.). MPAP, ESPA, and other
minisatellite payload adapter systems can be seen in
Table 59.
Figure 57: Two payloads attached
to an ESPA ring via the Spiderman
adapter (Pendleton, et al., n.d.).
144
Table 59: Minisatellite payload adapter systems.
Technology
Name
Description Developer TRL Status Figures
ESPA Ring
Payload interface which
carries up to six 180 kg
secondary payloads
Moog CSA
(USA)
9
Enabled STP-1 mission
in 2007
6
NASA LSP provided
guidance to qualify
prototype based on
generic space flight
parameters
ESPA payload adapter
used to carry up to
twelve 3U satellites per
ring
ESPA SUM
Moog CSA
(USA)
Multiple
Payload
Adapter Plate
(MPAP)
Minotaur adapter
capable of holding up
to four 180 kg payloads
Orbital
Sciences
Corporation
(USA)
9
Successfully used on
STP-S26 mission in 2010
Spiderman flat
plate adapter
Adapter plate integrates
with ESPA enabling two
additional 180 kg
payload
Moog CSA
(USA)
6
Successfully tested
under flight conditions
Secondary
Payload
Adapter and
Separation
System (SPASS)
Capable of carrying one
200 kg primary
payload, 90 kg
secondary payloads,
and up to 24 1U
CubeSats
Space Access
Technologies
and ATSB
(USA and
Malaysia)
9
Successfully flown on
Falcon 1, used to
deploy RazakSAT
2.3 Separation Systems
While many separation systems like the POD deployers make use of a
compressed spring mechanism, band systems are also quite common. Lightband
and Marman clamp separation systems are widely used, particularly for larger
spacecraft.
Lightband is a motorized separation system that ranges from 20.3 cm to 96.5 cm
in diameter. Smaller Lightband systems are used to deploy ESPA class satellites,
while larger variations may be used to separate the entire ESPA ring itself.
Lightbands motorized separation system eliminates the need for pyrotechnic
145
separation, and thus deployment results in lower shock and no post-separation
debris (PSC, 2013).
Marman band separation systems use energy stored in a clamp band, often along
with springs, to achieve separation. The Marman band is tensioned to hold the
payload in place. Upon severing the connecting bolt, via bolt cutters or
pyrotechnic bolts, the stored energy is rapidly released and the payload
separates (Lazansky, 2012). Sierra Nevada produces a Marman band separation
system known as Qwksep, which uses a series of separation springs to help
deploy the payload after clamp band release. Qwksep is available in two sizes,
38.1 cm for ESPA applications and 61 cm for ESPA Grande applications (Stavast,
et al., n.d.).
Other products making use of similar technology are available, but the products
in Table 60 are representative of the SoA. Depending on the launch vehicle,
separation systems may already be in place and available to secondary payloads.
Table 60: Band separation systems.
Technology
Description De veloper TRL Status Figures
Name
Planetary
Systems
Corporation
(USA)
System used to
separate payloads
from launch vehicles
9
Has successfully flown
on over 30 missions
Motorized
Lightband (MLB)
Clamp band
separation system for
ESPA and ESPA Grande
class satellites
6
Significant testing has
been conducted to
verify system
Sierra Nevada
Corporation
(USA)
Qwksep
2.4 Launch Integration Services for Secondary Small Spacecraft
Payloads
The sharing of a launch between a secondary small-satellite and a primary
payload is not considered to be standard and thus the services required for such
rideshare implementation are non-standard as well. Generally, the launch vehicle
146
(LV) customer (not the LV manufacturer) decides whether secondary smallsat
payloads will share a ride with a primary payload and if so, how these secondary
smallsats are dispensed. In most cases, the LV customer is the primary payload;
however, there are cases where a program or integration company can determine
rideshare possibilities
(Sanchez, 2013). More flexibility may be available to
secondary payloads that are funded through such a program, although the
mission schedule is generally decided by the primary payload.
Typical standard rideshare integration services are general services provided
by these integration companies that focus on LV integrations and do not vary
due to mission requirements of the primary payload. Standardized services
include system testing, engineering development support, hardware of the
dispenser, and necessary integration such as smallsat-to-dispenser and
dispenser-to-LV.
Rideshare integration services considered to be non-standard may depend
heavily on the primary payload and can include de-integration (e.g., executing a
separation maneuver), mission and science-specific services, special analyses
related to hardware and integration services, and isolated venting, shock,
vibration, and thermal environmental control.
Examples of launch integration companies include Spaceflight Services, Tyvak
Nano-Satellite Systems LLC, and TriSept Corporation.
Spaceflight Services provides routine access to space for deployed and hosted
smallsat payloads by using published commercial pricing, standard interfaces,
and frequent flight opportunities. They have launched payloads on multiple LVs
for NASA and industry (see Figure 58 for a visual representation of a smallsat
ejection from a dispenser). Specific integration services provided include
engineering analysis, smallsat-to-dispenser and LV integration, flight service,
coordination of launch and on-orbit services, safety audits, customer manifest
planning, and standard interface options for smallsats, including CubeSat (e.g.,
6U, 12U and 24U) from P-POD systems (Spaceflight Services LLC, 2013).
147
Figure 58: Spaceflight Services depiction of Smallsat ejections from dispenser in low-Earth orbit
(LEO)
(Spaceflight Services LLC, 2013).
Tyvak Nano-Satellite Systems LLC provides smallsat space vehicle products and
launch integration services such as engineering analysis, integration of complex
smallsat (e.g. CubeSat) subsystems, smallsat-to-LV interface control
documentation, verification of requirements, and payload certification
(Tyvak
Nano-Satellite Systems LLC, 2013). Tyvak has the experience of 11 successful
launches with five launches in the planning and development stages. Other
integration service capabilities include: smallsat-to-dispenser and LV integration,
dispenser design, fabrication, flight certification, testing (including shock,
vibrations, thermal, and thermal vacuum), launch and general mission
operations, and launch coordination between US and foreign entities.
TriSept Corporation serves as the lead integrator for the Operationally
Responsive Space (ORS) Office. TriSept Corporation has smallsat rideshare
integration experience with NASA, Department of Defense (DoD), and industry,
providing integration of multiple smallsats (e.g. CubeSat from P-POD) on the
Athena LV
and performing integration management of 45 unique smallsat
payloads as part of the ORS-3 and ORS-4 missions
(TriSept Corporation, 2013);
see Figure 59 for an example of a primary spacecraft integrated with a dispenser
filled with secondary smallsats. Specific integration services include secondary
payload integration, interface testing, smallsat-dispenser and primary-to-LV
integration, engineering analysis, and payload certification
(TriSept Corporation,
2013).
148
Figure 59: Example of primary payload integrated with smallsat secondary payloads stowed in
dispenser
(TriSept Corporation, 2013).
2.5 Isolated Environmental Control Possibilities
Services and technologies related to isolating potentially critical environments
for secondary smallsat payloads (such as venting, shock, vibrations, and thermal)
should be considered. To date, there have not been enough missions to properly
define these environments for each combination of LV-to-smallsat dispenser
system and thus this environmental information provided by LV manufacturers
is applicable for the entire payload, not just the secondary. However, this does
not mean the aforementioned environments are not available for isolation on or
within a secondary payload. There are options for secondary payloads that allow
for reduced shock and vibrations; two examples are the aforementioned shock
ring from Spaceflight Services and Moog CSA's Softride products: Shock Ring and
a Tuned Mass Damper, respectively (Moog Inc., 2013; see Figure 60). These
features are independent of the primary payload and LV, meaning the secondary
payload must show up to the launch site equipped with such features. Another
service provided by Moog CSA is component isolation, which can be potentially
valuable to instruments that require lower vibrations compared to the rest of the
system. Isolated thermal control is perhaps more difficult to achieve, considering
149
secondary smallsat payloads are generally attached to the LV's upper stage,
located within the fairing with the primary payload. Isolated thermal control
options are discussed more in the next section.
Figure 60: Moog CSA's shock ring (left) and tuned mass damper (right), used for both shock
isolation and reduced vibrations for secondary smallsat payloads (Moog Inc., 2013).
3. On the Horizon
3.1 Launch Integration Services for Secondary Smallsat Payloads
As previously mentioned, the isolated thermal control appears to be a relatively
difficult service for launch integration companies to provide. There have been
paints in development, and some already developed (AZ Technology, Inc., 2008),
that coat the skin of a smallsat to effectively alter its thermal environment,
independent of the primary payload located within the same upper stage fairing.
Additionally, smallsats can take advantage of multi-layer insulation (MLI) to
create an isolated thermal environment. Many such MLI shielding combinations
exist such as aluminum and black Kapton, aluminum and glass cloth, gold and
polyimide, etc. (Multek Corporation, 2013) and can be used in conjunction with
the aforementioned paints, increasing the thermal control available to smallsats.
3.2 Launch Vehicles
3.2.1 Primary Payload
The future holds the most promise for primary payloads launched on small and
cheap boosters. Many of the prime advantages of a small satelliteincluding
high iteration and replacement rates or large constellationsare not realizable
launching only as space allows on much larger, slower, traditional missions.
150
Several small launchers currently in development are very promising but at a low
TRL. One of the most serious programs currently in development is the Defense
Advanced Research Projects Agency (DARPA) Airborne Launch Assist Space
Access (ALASA) program. This program aims to produce a launcher capable of
boosting on the order of approximately 45 kg into LEO for less than $1M
including range support costs. It also aims to greatly simplify the launch process
by eliminating or mitigating several disadvantages of fixed-base launches
(including weather delays, large capital infrastructure costs, and limited
inclination accessibility) through airborne launches. The program supports
advanced technology development including stable propellant production and
better mission planning to support small launchers (DARPA, n.d.). ALASA
includes Boeing, Lockheed Martin, Northrop Grumman, Space Information
Laboratories, and Virgin Galactic as partners (Messier, 2012).
As a member of the DARPA ALASA program and with a separate airborne carrier
vehicle already extensively developed to host manned suborbital launches, Virgin
Galactic and The Spaceship Company are at the forefront of small launcher
design. The Spaceship Company is a manufacturing joint venture between Virgin
Galactic, which organizes launch customers, and Scaled Composites, which
designs the vehicles. These companies are developing the LauncherOne, which is
designed to deliver a 225 kg payload to low-inclination LEO, or 100 kg to Sun-
synchronous LEO. It will be launched off of the WhiteKnightTwo carrier aircraft
(Virgin Galactic, n.d.; see Figure 61).
Figure 61: Artist's conception of the Virgin Galactic LauncherOne and WhiteKnightTwo
(Virgin Galactic).
151
NASA itself is also working to advance small launchers. NASA Launch Services
(NLS) at the Kennedy Space Center is currently soliciting information for a
potential Nano-Sat Launcher as part of its NLS Enabling eXploration &
Technology (NEXT) program. This launcher is meant to launch at least a 15 kg 3U
CubeSat into a 425 km orbit at inclinations between 0 and 98# no later than
December 15, 2016. This program is limited to companies with fewer than 1,000
employees to encourage small business innovation outside of traditional means
of procurement (Foust, 2013).
152
Table 61: On the horizon primary launchers.
Technology
Name
Description Developer TRL Status Figures
ALASA Program
Multiple contracts to
Lockheed Martin,
Boeing, Virgin
Galactic, Ventions
LLC, Space
Information
Laboratories LLC
DARPA;
contractor not
yet selected
(USA)
!
Current phase (design
risk reduction) focused
on system design and
technology
development; Phase 2
will include build and
flight tests
Boeing small
launch vehicle
Air-launched, three-
stage orbital vehicle
with 100 lb/45 kg
payload now in
development
supported by DARPA
ALASA program
Boeing
(USA)
!
Various components
already flown, but no
larger scale integration
yet
GOLauncher 2
Air-launched, single-
stage rocket
delivering ~45 kg (100
lb) to LEO of up to 400
km with inclinations
from 0 to 98.7 degrees
Generation
Orbit Launch
Services, Space
Propulsion
Group
"
Two-year CRADA with
AFRL ongoing for
computational and
experimental tasks
LauncherOne
Air-launched two-
stage booster
Virgin Galactic
(USA)
!
WK2 carrier vehicle
development largely
complete; ongoing
testing of likely hybrid
rocket for SS2
suborbital manned
Long March
Micro Launch
Vehicle (LM-
MLV)
Smallest launch
vehicle planned of LM
family; other details
unknown
China
Aerospace
Science and
Technology
Corporation,
China National
Space
Administration
(China)
#
Unknown
N/A
Lynx
Suborbital space
plane with dorsal-
launched small
orbital booster, 650
kg to LEO
XCOR
Aerospace
(USA)
3
Mark I in development,
but Mark III necessary
for orbital launch
would be a redesigned
new vehicle
Microsat
Launch Vehicle
(VLM)
150 kg to 300 km
orbit; 3 solid stages
Brazilian Space
Agency (AEB),
German Space
Agency (DLR)
(Brazil/
Germany)
4
Projected launch in 2015
153
5
22.7 kg to LEO; Whittinghill
Minimum cost NASA SBIR 08-2 S4.01-
NO2/Rubber hybrid Aerospace
launch vehicle 8692; will be at TRL 6 by
rocket (USA)
completion of contract
Pump-fed, 2-stage
nano launch vehicle
4
Nano launch for low-cost on Ventions
NASA SBIR 12-1 E1.02- N/A
vehicle demand placement of (USA)
9215
cube and nano-
satellites into LEO
Nanosat launch Orbital nanosat Garvey 4
vehicle (a.k.a launcher with 10 kg to Spacecraft NASA SBIR 12-1 E1.02-
Garvey 10/250) 250 km orbit (USA) 9091
Three-stage vehicle 5
with 30-50 kg Multiple missions on
Interorbital
(variants 5 and 7, manifest for 2013, but
Neptune Systems
respectively) to no test flight yet;
(USA)
circular polar orbit at multiple components
310 km tested
NAMMO,
10 kg to 350 km polar
Norwegian 3
North Star LEO; evolved
Space Centre, First launch planned
Launch Vehicle sounding rocket
ESA for 2020
design
(Norway)
Swiss Space 3
S3 vehicle 250 kg to LEO, air-
Systems (S3) Company launched in
(unnamed) launched, three-stage
(Switzerland) March 2013
25 kg to 750 km orbit
at 28.5 degree 5
U.S. Army;
inclination; 24 hours Ground engine test,
Contractor not
SWORDS from storage to suborbital flight test,
yet selected
launch ready; Tridyne and orbital flight test
pressure-fed engine in summer 2014
with LOX/CH4
3.2.2 Secondary Payload
One advantage of the secondary launch market is that market forces from both
small and large spacecraft can collectively drive development and cost-reduction.
Even advances in large, heavy-lift boosters like NASAs Space Launch System or
154
SpaceXs Falcon Heavy can help to open space to more parties. The Falcon Heavy
is one of the most promising in this area. Projected to cost just over $1K/kg, the
Falcon Heavy will be one of the cheapest vehicles on the market while throwing
53,000 kg into LEO. Innovative features like propellant cross-feed from the side-
mounted boosters to the core for payloads over 45,000 kg help to maximize
performance and efficiency. Advances in reusability or Merlin rocket engine
enhancements will be shared across the Falcon line (Space Exploration
Technologies, 2013).
3.3 Payload Adapters and Deployment
3.3.1 CubeSat Deployers
Several CubeSat integration systems are under development to support increased
demand for CubeSat launches. Planetary Systems is developing 12U and 27U
versions of CSD allowing for larger, more complex CubeSat payloads (Williams,
2013). Spaceflight Services is developing DecaPOD to enable more CubeSat
secondary payloads per launch. DecaPOD holds up to ten 3U CubeSats and is
compatible with Spaceflights Secondary Payload System (SSPS). Two DecaPODs
fit on each of SSPSs five ports, allowing for a total of 100 3U CubeSats if fully
loaded (Spaceflight, 2012).
Table 62: Examples of on the horizon small spacecraft deployers.
Technology
Description Developer TRL Status Figures
Name
Planetary 3
Canisterized CubeSat dispenser
Systems Analyzed with finite
Satellite capable of deploying
Corporation element model under
Dispenser (CSD) 12U and 27U Payloads
(USA) relevant conditions
System capable of
Spaceflight, 5
transporting and
DecaPOD Inc. Deployment subsystem
deploying 10 3U
(USA) has successfully flown
CubeSats
155
3.3.2 Adapter Rings
A scaled version of the ESPA ring is in development, known as Small Launch
ESPA. Small Launch ESPA is designed to be compatible with Minotaur IV, Taurus
and Delta II launch vehicles. It is particularly well suited to host CubeSat and
sub-ESPA class payloads (Maly, et al., 2009). As mentioned previously, fewer
adapters exist to serve the microsatellite class. However, Small Launch ESPA will
greatly increase interface options for microsatellites, especially by increasing the
number of compatible launch vehicles.
Spaceflight Services is developing an ESPA based adapter system known as SSPS,
to be compatible with intermediate class launch vehicles such as Falcon 9,
Antares and EELV. At its core the system has an ESPA Grande ring, a five port
ESPA ring capable of carrying up to 300 kg payloads per port, either standalone
spacecraft or CubeSat deployers. What is unique about SSPS is the inclusion of an
avionics suite, power supply, and batteries to supply power to hosted payloads,
provide telemetry to ground stations, and provide general mission management
(Spaceflight, Inc., 2012). The ability to host secondary payloads after launch
vehicle separation could greatly increase the mission lifetime of secondary
payloads, and may even enable new missions.
Table 63: Examples of on the horizon small spacecraft adapter rings.
Technology
Name
Description Developer TRL Status Figures
Carries up to six 100
kg payloads on
Minotaur IV and Delta
II
3
Analyzed with finite
element model under
launch conditions
Small Launch
ESPA
Moog CSA
(USA)
Spaceflight
Secondary
Payload System
(SSPS)
Hosts up to five 300
kg spacecraft
Spaceflight,
Inc.
(USA)
5
Adapter ring and
deployment
subsystems have
successfully flown
156
3.3.3 Space Tugs
One of the main disadvantages of riding as a secondary payload is the inability to
launch into your desired orbit. In the future secondary payloads may no longer
need to be limited by the primary payload orbit. By using a space tug, or some on
orbit servicing vehicle, secondary payloads will be able to maneuver into desired
orbits.
Moog CSA is currently developing the ESPA Orbital Maneuvering System (OMS) to
fill this role. OMS uses an ESPA adapter ring as the base of a free flying
spacecraft. The ring is designed to separate from the launch vehicle and use its
own propulsion and avionics to navigate to desired orbits (Maly, et al., 2009).
Spaceflight Services is developing a similar technology known as the SHERPA
Tug, or Shuttle Expendable Rocket for Payload Augmentation. The vehicle has
SSPS at its base, but includes solar panels to provide up to 25O W for hosted
payloads, and a propulsion system for orbital maneuvering. Two propulsion
systems exist, one contains a monopropellant thruster capable of delivering up
to 400 m/s deltaV, and one contains a bi-propellant thruster capable of
delivering up to 2,200 m/s deltaV (Spaceflight, Inc., 2012).
Table 64: On the Horizon for small spacecraft for Space tugs.
Technology
Name
Description Developer TRL Status Figures
Orbital
Maneuvering
System
Propulsion system is
integrated into ESPA
ring allowing adapter
to act as an
independent
spacecraft
Moog CSA
(USA)
5
Adapter ring and
deployment
subsystems have
successfully flown
SHERPA Tug
Orbital servicing
vehicle capable of
changing secondary
payload orbit and
host payloads for up
to one year
Spaceflight,
Inc.
(USA)
5
Adapter ring and
deployment
subsystems have
successfully flown
157
3.4 Launch Integration Services for Secondary Smallsat Payloads
As mentioned in this section's state of the art counterpart, isolated thermal
control appears to be a relatively difficult service for launch integration
companies to provide. There have been paints in development (and some already
developed) that coat the skin of a smallsat to effectively alter its thermal
environment, independent of the primary payload located within the same upper
stage fairing. Additionally, smallsat can take advantage of MLI to create an
isolated thermal environment. Many such MLI shielding combinations exist (e.g.,
gold-gold, platinum-glass, etc.) and can be used in conjunction with the
aforementioned paints, increasing the thermal control available to smallsats.
4. Conclusion
A wide variety of integration and deployment systems exists to provide rideshare
opportunities for small satellites on existing launch vehicles. While leveraging
excess payload space will continue to be profitable into the future, dedicated
launch vehicles and new integration systems are needed to fully utilize the
advantages provided by small satellites. Dedicated launch vehicles may be used
to take advantage of rapid iteration and mission design flexibility, enabling small
satellites to dictate mission parameters. New integration systems will greatly
increase the mission envelope of small satellites riding as secondary payloads.
Advanced systems may be used to host secondary payloads on orbit to increase
mission lifetime, expand mission capabilities, and enable orbit maneuvering. As
we move into the future these technologies may yield exciting advances in space
capabilities and understanding.
5. References
Ames, N.: NASA-Built Nanosatellite Launch Adapter System Ready for Flight.
[Online] 2013. Available at:
http://www.nasa.gov/centers/ames/news/2013/NLAS-ready-for-flight.html -
.Ug8RzZLVBsk [Accessed 16 August 2013].
158
Atkinson, N.: The Atlas V with LRO and LCROSS at the pad. [Online] 2009.
Available at: http://www.universetoday.com/32779/lrolcross-ready-for-launch-
to-the-moon/lro-left-vif1s/
Bergin, C.: SpaceX deal boosts Falcon 9!s secondary payload manifest. [Online]
2012.
Available at: http://www.nasaspaceflight.com/2012/06/spacex-deal-falcon-9s-
secondary-payload-manifest/ [Accessed 16 Aug 2013].
Brgge, N., n.d.: Super-Strypi >SPARK. [Online] Available at:
http://www.b14643.de/Spacerockets_2/United_States_7/SPARK/Versions/SPARK
.htm
[Accessed 19 August 2013].
Caldwell, D., Ridenoure, R.: RocketPod: A Method for Launching CubeSat-Class
Payloads on ELVs and Spacecraft. North Logan, UT, s.n. 2005.
DARPA, n.d.: Airborne Launch Assist Space Access (ALASA). [Online]
Available at:
http://www.darpa.mil/Our_Work/TTO/Programs/Airborne_Launch_Assist_Space
_Access_(ALASA).aspx [Accessed 18 August 2013].
David, L.: A Space Aloha: Hawaii Gears Up for First Satellite Launch. [Online]
2013.
Available at: http://www.space.com/20849-hawaii-small-satellite-launch.html
Foust, J.: NASA seeks to buy a dedicated nanosatellite launch. [Online] 2013.
Available at: http://www.newspacejournal.com/2013/08/14/nasa-seeks-to-buy-a-
dedicated-nanosatellite-launch/
Goodwin, J., Wegner, P.: Evolved Expendable Launch Vehicle Secondary Payload
Adapter. Albuquerque, NM, s.n. 2001.
IHI Aerosapce: JEM Small Satellite Orbital Deployer (J-SSOD) Fitch Check Case
Instruction Manual, Tomioka: IHI Aerospace co., Ltd. 2012.
159
Kramer, H. J.: CubeSat Concept. [Online] 2012.
Available at: https://directory.eoportal.org/web/eoportal/satellite-missions/c-
missions/CubeSat-concept [Accessed 16 August 2013].
Lan, W.: Poly PIcosatellite Orbital Deployer MK III ICD. California Polytechnic State
University. San Luis Obispo, 2007.
Lazansky, C.: Refinement of a Low-Shock Separation System. s.l., Jet Propulsion
Laboratory, 2012.
Maly, J. R., Stavast, V. M., Sanford, G. E., Evert, M. E.: Adapter Ring for Small
Satellites on Responsive Launch Vehicles. Los Angeles, CA, s.n. 2009.
Marin, C., n.d.: Evolved Expendable Launch Vehicle (EELV) Secondary Payload
Adapter (ESPA) Six Unit Mount (SUM), s.l.: LSP Mission Integration, Kennedy Space
Center.
Messier, D.: DARPA Awards 6 Small Airborne Launch Vehicle Contracts. [Online]
2012.
Available at: http://www.parabolicarc.com/2012/07/02/darpa-awards-6-small-
launch-vehicle-contracts/
Moog: Other Adapters. [Online] 2013.
Available at: http://www.csaengineering.com/products-services/other-adapters/
[Accessed 16 August 2013].
NASA: IRIS Reaches Orbit. [Online] 2013.
Available at: http://www.nasa.gov/mission_pages/iris/launch/index.html -
.UhIFupLvvh5
Orbital Sciences: Fact Sheet. [Online] 2013.
Available at: http://www.orbital.com/NewsInfo/Publications/Pegasus_fact.pdf
Orbital Sciences: Minotaur IV V VI User's Guide. Orbital Sciences Corporation.
Dulles, VA, 2013.
Orbital Sciences: Taurus. [Online] 2013. Available at:
http://www.orbital.com/SpaceLaunch/Taurus/
160
Pendleton, S., Basile, J., Fowler, E., n.d.: Low-Cost Flat Plate Adapters for Dual
Primary Payload Missions. CSA Engineering Inc. Mountain View, CA.
PSC: 2000785 Rev D User's Manual for Mark II Lightband. Planetary Systems
Corporation. Silver Spring, MD, 2013.
Space Exploration Technologies: Falcon Heavy. [Online] 2013.
Available at: http://www.spacex.com/falcon-heavy
Spaceflight, Inc.: Spaceflight, Inc. Secondary Payload Users Guide. Spaceflight, Inc.
Tukwila, WA, 2012.
Spaceflight: Spaceflight Unveils Its DecaPOD CubeSat Deployer. [Online] 2012.
Available at: http://spaceflightservices.com/spaceflight-unveils-its-decapod-
CubeSat-deployer/ [Accessed 23 August 2013].
Stavast, V., Lazansky, C., Helgesen, B., n.d.: SNC Qwksep - A Simple, Reliable, Stiff
and Low-Shock Separation System for Small Sat Missions. s.l.: IEEE Xplore.
Szatkowski, J.: ULA Rideshare Smallsat Missions for Lunar & Inter-Planetary
Exploration. Cal Tech, CA, s.n. 2013.
Taylor, B.: The University of Hawai'i Innovation Initiative. [Online] 2013.
Available at: http://www.hawaii.edu/offices/op/innovation/taylor.pdf
Technologies, Space Exploration: Falcon 9. [Online] 2013.
Available at: http://www.spacex.com/falcon9
ULA: Atlas V Launch Services User's Guide. Centennial, CO: ULA. 2010.
United Launch Alliance: Technical Summary. [Online] 2013.
Available at:
http://www.ulalaunch.com/site/docs/product_cards/AV_product_card.pdf
Virgin Galactic, n.d.: Performance and Specification. [Online]
Available at: http://www.virgingalactic.com/launcherOne/performance-and-
specification/ [Accessed 18 August 2013].
161
Willcox, T.: Atlas V Aft Bulkhead Carrier Rideshare System. AIAA/USU. North
Logan, UT, 2012.
Williams, R.: Containerized Satellite Dispenser (CSD) Data Sheet. Planetary
Systems Corp. Silver Spring MD, 2013.
162
XI. GROUND SYSTEMS AND OPERATIONS
1. Introduction
1.1 General ground system setup
In the general case, a ground system consists of a network of ground stations
and different control centers such as the Spacecraft Operations Control Center
(SOCC), the Payload Operations Control Center (POCC) and the Mission Control
Center (MCC). These elements may or may not be located at the same
geographical location depending on the type, size and complexity of the mission.
In all cases the different elements are supposed to work together with the overall
goal to support the spacecraft and the users of the data generated by the
mission.
Figure 62 shows the functional relationship between the space segment and the
ground segment of a space mission. The ground segment is made up of the users
of the mission data and the ground system, which has two functions: (i)
supporting the space segment (spacecraft and payload), and (ii) relaying the
mission data to the users. To support the spacecraft, the ground system must
command and control the bus and the payload, monitor their health, track the
spacecraft to determine its orbital position, and determine the spacecrafts
attitude using ADCS sensor information (for more information on ground
systems, refer to Chapter 15 of Larson & Wertz, 2004).
Figure 62: Functional relationship between space segment and ground segment (Larson & Wertz,
2004)
!"#$%& ()*+,-
(./0,0"/1+ /%& 2/)3#/&
($..#"+
4,3/) #1 56**6#% 7/+/
7/+/
8*,"*
(./0,0"/1+
!"##$%&
()*+),-,
./,,/"%
0$-$
!"##$%& 1
23$45/%6
0$-$
2)7)#)-38
./,,/"%
0$-$
93"+%& :)6#)%-
:;$4) :)6#)%-
9: ;"#$%& *+/+6#%* < 0#%+"#3 0,%+,"*=
163
1.2 Differences with small spacecraft ground systems
The ground systems architecture for small spacecraft missions often takes a
different form compared to the classical architectures used for large spacecraft
missions. The low-cost paradigm shift mentioned in Section I and the
accessibility of COTS technology for the space sector have not only changed how
designers think about a spacecraft but also how a ground systems architecture
can be conceived. Both the ground systems of small spacecraft missions and the
demographics of the data user community differ from the common scheme of
Figure 62. An overview of such potential differences (shown in Table 65)
highlights the extent to which CubeSat ground systems can differ from their
classical counterparts. Due to length limitations, the entries of Table 65 are not
discussed in detail: refer to Schmidt (2011) for an exhaustive treatise on the
characteristics of small spacecraft ground systems.
Table 65: Fundamental differences between a small spacecraft ground system and classical
ground systems for large spacecraft (see 2.2 of Schmidt [2011] for more information).
Classical Ground System CubeSat Ground System
Legacy systems New systems
High-cost, high complexity Low-cost (COTS), low complexity
Clear distinction between mission
control and ground station network
Standalone system: MCC, SOCC, POCC
and principal ground station are often
aggregated into a single entity
Supports a small to moderate number
of different missions in parallel.
Different types of antennas and
hardware enable capability of
communicating with more than one
spacecraft simultaneously
Capability to support a large number
missions sequentially. Only one
antenna, therefore no capability to
communicate with more than one
spacecraft simultaneously
of
Supports missions with long lifetimes Supports missions with short lifetimes
Provides high quality of service
(security, reliability, etc.)
Does not
service
guarantee high quality of
Commercial or institutional operators Typically academic
operators
or amateur
Hierarchical topology with a small
number of nodes distributed
strategically around the globe
Peer-to-peer topology with typically
large number of ad-hoc nodes
participating on a voluntary basis
a
164
No flexibility in the use of the
topologys individual nodes
Many missions use nearly the same
frequency bands, so individual nodes in
the topology may be exchangeable
S-band and higher frequencies Typically UHF and VHF
CCSDS based long-haul communication
protocols
TCP/IP based communication protocols
Big dishes Small dishes or no dish at all (Ham-type
antennas)
Support high power (> 40W) spacecraft Support low power (< 5W) spacecraft
Large bandwidth, data rate and
throughput
Small bandwidth, data rate and
throughput
Large software requirements Small software requirements
Large number of facilities and
personnel with much expertise
Small number of facilities and
personnel with usually less expertise
Figure 63 illustrates the variety in ground system architectures that can be used
for small spacecraft missions. Image (a) shows an example of a classical ground
system setup, i.e. the Air Force Satellite Control Network (AFSCN). The topology
of the AFSCN is hierarchical, with 12 nodes organized around a central master
node at Schriever AFB, CO. Image (b) depicts the distributed network of ground
stations used for the PhoneSat project (http://www.phonesat.org). PhoneSat was
supported by 1,343 volunteer nodes organized in a distributed topology. Image
(c) shows an example of a common small spacecraft ground segment topologya
single node consisting of a university ground station and control room.
165
Figure 63: Various ground system architectures encountered in small spacecraft missions. (a)
depicts the US Air Force Satellite Control Network (AFSCN) as an example of a conventional
hierarchical ground system setup (image credit: USAF). (b) shows the 1343 nodes that participated
on a voluntary basis in the distributed ground system architecture of Phonesat (image credit:
http://www.phonesat.org). (c) illustrates the case where a smallsat mission is managed and
operated using a single ground station only.
The principal driver for a small spacecraft ground system is cost. To lower costs,
a typical SoA ground system merges the three conventional control centers
MCC, SOCC, and POCCinto a single unit positioned in one geographical
location. The whole mission is often managed from a single lab room modified
for that purpose. The ground station is either a fixed or mobile COTS antenna
connected to mission control using standard cabling. Common frequency bands
are VHF, UHF and sometimes S-band at the higher frequency limit. Tracking,
Telemetry and Command (TT&C) for both platform and payload is managed by a
single desktop computer.
166
2. State of the Art
2.1 Ground Systems
Figure 64 compares the size and scope of typical large and small spacecraft
ground systems.
Figure 64: Differences in size and scope between large (left-hand side) and small spacecraft
ground systems (right-hand side). Top left: NASAs Deep Space Network (DSN) ground station in
Goldstone, CA. Top right: GENSO roof-top ground station at the International Space University,
Strasbourg, France. Bottom left: NASA MCC at JSC, Houston, TX. Bottom right: Student operating
the small spacecraft MCC at the University of Santa Clara, CA.
Table 66 lists a selection of developers providing turnkey solutions for small
spacecraft ground systems. Prices usually range between 10,000 and 100,000
USD.
167
Table 66: Examples of small spacecraft ground system solutions.
Technology
Name
Description Developer TRL Status Figures
ISIS Small
Satellite Ground
Station
Comprehensive
ground system setup
for microsatellites
and CubeSats (VHF,
UHF, S-band options)
Innovative
Solutions In
Space
(Netherlands)
9
Has been used
successfully in at least
one mission: Delfi-C3
nanosat mission (2008)
Open System of
Agile Ground
Systems
(OSAGS)
Low-cost network of
three equatorial
S-band ground
stations
Espace, Inc.
(USA)
8
Successfully used in
2002 to operate the MIT
HETE-2 mission. Can
accommodate CubeSats
8
Comprehensive
ground system setup
for microsatellites
and CubeSats (VHF,
UHF, L-band and
2.4 GHz options)
Installed on the roof at
Satellite
Tracking and
Control Station
(STAC)
the University of
Clyde Space
(Scotland)
Strathclyde, Glasgow,
Scotland. Operational
for 2 years. No available
information on
missions
Mobile CubeSat
Command &
Control Ground
Station
(MC3)
Network of fully
autonomous ground
stations supporting
the NROs Colony
Program
Naval
Postgraduate
School
(USA)
6
TRL assessment
supported by Griffith
(2011)
In addition to purchasing new equipment for mission operations, small
spacecraft operators can also resort to existing capabilities. An example of an
existing ground system supporting high-frequency communications for small
satellites is the Open System of Agile Ground Stations (OSAGS). Owned by
Espace, Inc., OSAGS is a low-cost network of three equatorial S-band ground
stations located in Kwajalein, Cayenne, and Singapore, based on software defined
radio (Cahoy, et al., 2012). The stations operate in S-band with a 2.025 - 2.0120
GHz uplink and 2.20 - 2.30 GHz downlink frequency. They can handle
communication requirements up to 3.5 Mbps. The system is agile and can
168
support different satellite missions simultaneously. The system is readily
available for any small spacecraft mission in need of ground segment support for
little cost. Satellites are required to use dedicated software provided by Espace,
Inc., and they must have the proper S-band capabilities to communicate with the
system.
2.2 Operations
From a regulatory point of view, small spacecraft missions must adhere to the
same radio spectrum regulations that apply to larger spacecraft. In the U.S., these
regulations are governed by the Federal Communications Commission (FCC).
Missions have the option to use amateur radio frequencies for communications,
for which licenses are simple and quick to obtain. Since this kind of license is not
available to governmental entities, whose missions are regulated by the National
Telecommunications and Information Administration (NTIA), a number of
partnerships have emerged between governmental players and academia. For
instance, a number of CubeSat missions developed by NASA Ames Research
Center are operated from the MOC at the University of Santa Clara. Similar radio
frequency regulations exist in other countries, and these regulatory issues can
make small spacecraft partnerships increasingly difficult. It is the responsibility
of the developers to ensure they follow the proper regulations as they build and
operate their satellites.
Traditionally, amateur radio bands have been the preferred means for CubeSats
to communicate with the ground. However, CubeSats are increasingly shifting
from low-performance missions to higher-complexity science or technology
missions. The larger amount of data produced by these higher-complexity
missions necessitates higher communication data rates than amateur bands can
provide. Recent CubeSat missions are indeed moving to higher, non-amateur
frequency bands to support their data requirements. For instance, the Dynamic
Ionosphere CubeSat Experiment (DICE), launched in 2011, used the 460-470 MHz
meteorological-satellite band with L3 Cadet radios to produce a 1.5 Mbps
downlink data rate to support its science mission (Klofas & Leveque, 2012). As
CubeSat missions abandon amateur radio bands for higher-speed frequencies,
their ground system requirements change. Unlike amateur radio licenses that
169
allow CubeSats to autonomously beacon data to any listening amateur radio
operator, non-amateur radio licenses prohibit satellite data beaconing. They are
typically point-to-point, meaning any ground station interacting with the satellite
must be similarly licensed. Clearly, as CubeSats shift to non-amateur
communication bands, their ground systems will have to adapt accordingly.
A possible alternative to using mission-specific ground stations altogether is to
communicate with satellite phone/data networks such as Iridium, Orbcomm, and
Globalstar. TechEdSat-1, a 1U CubeSat launched from the International Space
Station (ISS) in October 2012, had a mission goal to investigate this inter-satellite
communication method. The satellite had Quake Global Q1000 and Q9602
modems onboard to test communications with both the Iridium and Orbcomm
constellations (Lfgren, et al., 2013). Unfortunately, the satellite was forced to
disable its modems before communications could occur due to a delay of the
FCC license. In April 2013, another experiment including an Iridium modem, flew
as an additional payload attached to the outside of the Bell PhoneSats frame
(Green, 2013). This experiment successfully communicated the satellite location
to the Iridium constellation, which then sent the information to the mission team
via email. The team saw improvements in data rate and signal quality as
compared to communications with amateur radio ground stations. The
experiment was also able to transmit 10 hours worth of data to the Iridium
constellation over a 24-hour period, which is a significant improvement over
typical satellite-to-ground transmission durations for CubeSats.
Inter-satellite communication will be tested again soon using TechEdSat-3p, a 3U
CubeSat launched to the ISS on August 3, 2013 (Harding, 2013). After
deployment, TechEdSat-3p will attempt to communicate with the Iridium satellite
network using two redundant Quake Global Q9603 modems. There are also plans
for the 1U AztechSat to test communications with the Globalstar constellation.
These missions are actively proving the value of inter-satellite communications
to relay data to the ground. The potential for saved costs and improved quality
that can result from small satellites exchanging ground stations with existing
satellite phone constellations certainly warrants further investigation.
170
3. On the Horizon
As the ground system and communication options for small satellites and
particularly CubeSats expand, project managers have to consider the trade-off
between data quality/size and cost. In the past, many missions depended entirely
on amateur radio ground stations to support satellite operation and
communication, and the amateur radio community has indeed proved invaluable
to the CubeSat community. But as mission complexity and data requirements
increase, more projects are looking to non-amateur ground stations and other
options like inter-satellite communications with satellite-phone constellations to
meet their needs. These options, however, tend to present higher costs
associated with radio frequency licenses, software specific to a given service
provider, and sometimes the service itself based on data size or communication
duration. Many factors can affect the cost and data quality and size of each
communication method, and for some of these methods the factors are either
only beginning to be understood in the context of small satellite operations, or
they have yet to be encountered. The relationship between data quality, data
size, and cost for these communication methods must be studied over the
coming years as the various methods are analyzed by current and future small
spacecraft missions.
In light of the distributed and highly dynamic ground system topology for small
spacecraft missions (see Figure ), there is a need for coordination between the
ground stations involved. This coordination can be achieved through common,
openly available software for the management of a ground system. The Global
Educational Network for Satellite Operations (GENSO) system by ESA is an
example of this. GENSO is a software networking standard for universities which
allows a remote operator to communicate with their small spacecraft using
participating amateur radio ground stations around the globe. Data collection for
a given satellite could increase from minutes per day via one ground station to
many hours per day via the GENSO network. Unfortunately, the GENSO project is
currently on hold, with little expectation of resuming progress. While the
prospect of GENSOs future is unknown, the general concept of a distributed
network of amateur radio ground stations to support small spacecraft operations
171
is still a concept worth looking into. Planning & scheduling and data management
are two areas of ongoing research within the field of small spacecraft ground
systems software.
The future will see an increasing number of small spacecraft missions involving
not only single satellites but also swarms, constellations and formations of
spacecraft (see e.g., Raymond, et al., 2000). A distributed infrastructure of small
spacecraft made up of dozens, if not hundreds, of units is likely to become a
standard to conduct low-cost Earth observation and science missions. However,
the scalability of mission operations without significant automation is limited.
Siewert & McClure (1995) recall that the number of operators usually scales
linearly with the number of telemetry nodes needed to monitor the satellite. The
authors propose that, assuming a best case scenario in which a single small
satellite requires roughly ten operators to ensure mission success (not including
payload operators), a constellation of hundreds of satellites would require
thousands of operators and thus an inordinate operations budget. In the CubeSat
realm, where operations budgets are generally scarce, conventional operations
would require an unrealistic commitment from the academic and amateur
community. To keep costs low and allow for the emergence of next-generation
distributed small satellite platforms, it will therefore become necessary for the
spacecraft to perform certain operations autonomously in orbit or, automatically
from the ground. The challenges related to partially or fully autonomous
operations and multi-mission operations centers for small spacecraft clusters are
ongoing fields of research.
4. Conclusion
The development of small satellite integration, launch, and deployment systems
to date has largely been focused on leveraging existing launchers for much larger
payloads. Many of these heritage vehicles are available with excess mass capacity
for secondary spacecraft, and a wide variety of integration and deployment
systems have been developed to provide rideshare opportunities. These
rideshares help to reduce costs but are often allocated only after the primary
mission defines most launch criteria. Integration and deployment mechanisms
are thus designed for minimal interference to the primary mission, usually by
172
providing electromagnetic shielding and shock absorption. Adapters exist to
both secure and deploy secondary payloads of various sizes. Multiple POD
based deployment systems are used to launch 1U to 6U CubeSats, while flat plate
adapters and ESPA rings are used to host larger payloads. SoA technologies in
these areas are also responding to increased demand and capability for small
satellite missions. EELV rockets (United Launch Alliances Atlas V and Delta IV)
are currently the most frequent launchers, especially after the development of
the ESPA ring. Current launch vehicles, though, are often unable to meet
demands for missions that need a very specific science orbit, interplanetary
trajectories, precisely timed rendezvous, or special environmental
considerations. Launching as a secondary payload also limits the impact of small
satellite advantages such as quick iteration time and low total capital costs.
5. References
Cahoy, K. et al.: S-Band CubeSat communications with the Open System of Agile
Ground Stations (OSAGS). Cal Poly CubeSat Developers' Workshop. San Luis
Obispo, 2012.
Green, M.: PhoneSat Flight Demonstrations: Successful PhoneSat Mission
Completed. [Online] 2013.
Available at:
http://www.nasa.gov/directorates/spacetech/small_spacecraft/phonesat.html
[Accessed 23 August 2013].
Griffith, R. C.: Mobile CubeSat Command and Control (MC3). Naval Postgraduate
School. Monterey, CA, USA, 2011.
Harding, P.: Japans HTV-4 launches supplies and science to the ISS. [Online] 2013.
Available at: http://www.nasaspaceflight.com/2013/08/japans-htv-4-launches-
supplies-scienceiss/ [Accessed 23 August 2013].
Hsiao, F.-B., Liu, H.-P., Chen, C.-C.: The Development of a Low-Cost Amateur
Microsatellite Ground Station for Space Engineering Education. Global J. of Engng.
Educ., 4(1), pp. 83-88, 2000.
173
Klofas, B., Leveque, K.: The Future of CubeSat Communications: Transitioning
Away from Amateur Radio Frequencies for High-speed Downlinks. AMSAT
Symposium. Orlando, FL, 2012.
Larson, W. J., Wertz, J. R.: Space Mission Analysis and Design. 3rd ed. Microcosm
Press. El Segundo, CA, 2004.
Lfgren, H. et al.: TechEdSat: a minimal and robust 1U CubeSat architecture using
plug-and-play avionics. 9th IAA Symposium on Small Satellites for Earth
Observation. Berlin, Germany, 2013.
Raymond, C. A., Bristow, J. O., Schoeberl, M. R.: Needs for an Intelligent
Distributed Spacecraft Infrastructure. NASA Earth Science Technology Workshop.
Arlington, VA, 2000.
Schmidt, M.: Ground Station networks for Efficient Operation of Distributed Small
Satellite Systems. Universitaet Wuerzburg: Schriftenreihe Wuerzburger
Forschungsberichte in Robotik und Telematik. Band 6, Wuerzburg, 2011.
Shirville, G., Klofas, B.: GENSO: A Global Ground Station Network. Cal Poly State
University. San Luis Obispo, 2004.
Siewert, S., McClure, L. H.: A System Architecture to Advance Small Satellite
Mission Operations. 9th AIAA/Utah State University Conference on Small
Satellites. Logan, UT, 1995.
174
XII. CONCLUSION
This report provides an overview and assessment of the SoA for small spacecraft
technology. After introducing small satellites, the SoA of spacecraft integration
was presented, and the SoA of each of the relevant subsystems was addressed in
turn. Conclusions are given at the end of each section of this report.
This report will be regularly updated as emerging technologies mature and
become SoA. Any current technologies that were inadvertently missed will be
identified and included in subsequent versions. Reader input is welcome; please
email arc-smallsats@mail.nasa.gov and include state of the art report in the
subject line.
The appendix that follows provides additional information and a set of raw data
collected while researching this report.
175
APPENDIX: TABLES AND ADDITIONAL DATA
Table A.1: List of small spacecraft missions that have been used as a reference for the research presented in the report.
Name Launch Date Mission
Weight
(kg)
Owner
Owner
Country
Maker Maker Country Orbit
JAWSat 01/27/2000
Tech
Demo
191.4 USAF USA
LEO
OCS 01/27/2000
Tech
Demo
22.0 USA USA L'Garde, Inc. USA LEO
Falconsat 1 01/27/2000 Education 52.0
United States Air
Force Academy
USA
LEO
ASUSat 01/27/2000 Education 5.0
Arizona State
University
USA
Arizona State
University
USA LEO
Artemis-
Thelma
01/27/2000 Education 0.5
Santa Clara
University
USA
Santa Clara
University
USA LEO
Artemis-
Louise
01/27/2000 Education 0.5
Santa Clara
University
USA
Santa Clara
University
USA LEO
StenSat 01/27/2000 Education 0.2 USA USA LEO
Tsinghua 1 06/28/2000
Tech
Demo
50.0 Tsinghua University China
SSTL
UK SSO
MITA-O 07/15/2000
Tech
Demo
170.0 Italy Italy
Carlo Gavazzi
Space
Italy SSO
Bird-Rubin 07/15/2000
Tech
Demo
37.0 DLR Germany OHB Systems Germany LEO
Tiungsat 1 09/26/2000
Tech
Demo
50.0 Malaysia Malaysia SSTL UK LEO
Megsat 1 09/26/2000
Comm &
Positioning
56.0 MegSat Italy MegSat Italy LEO
Unisat 09/26/2000
Tech
Demo
10.0 University of Rome Italy University of Rome Italy LEO
Saudisat 1A 09/26/2000
Tech
Demo
10.0
KACST Space
Research Institute
Saudi Arabia
KACST Space
Research Institute
Saudi Arabia LEO
Saudisat 1B 09/26/2000
Tech
Demo
10.0
KACST Space
Research Institute
Saudi Arabia
KACST Space
Research Institute
Saudi Arabia LEO
H ETE 2 10/09/2000 Science 124.6 NASA USA NASA USA LEO
176
Tech
STRV 1C 11/16/2000 100.0 DERA UK DERA UK Elliptical
Demo
Tech
STRV 1D 11/16/2000 100.0 DERA UK DERA UK Elliptical
Demo
Swedish Institute of Swedish Institute of
Munin 11/21/2000 Science 6.0 Sweden Sweden SSO
Space Physics Space Physics
Tech
LDREX 12/20/2000 182.0 JAXA Japan Elliptical
Demo
Comm &
LRE 08/29/2001 90.0 JAXA Japan JAXA Japan Elliptical
Positioning
Utah State
NASA Space Grant University Space
Starshine 3 09/30/2001 Science 91.0 USA USA LEO
Consortium Dynamics
Laboratory
Tech
PICOSat 9 09/30/2001 67.0 USAF USA SSTL UK LEO
Demo
Comm &
PCSat 09/30/2001 17.5 US Naval Academy USA US Naval Academy USA LEO
Positioning
Tech
Sapphire 09/30/2001 16.0 Stanford University USA Stanford University USA LEO
Demo
Tech
PROBA 1 10/22/2001 94.0 EU EU Verhaert Belgium SSO
Demo
BIRD 1 10/22/2001 EO 92.0 DLR Germany DLR Germany SSO
Starshine 2 12/05/2001 Science 38.0 NASA USA LEO
Compass 12/10/2001 Science 80.0 Izmiran Russia/CIS GRTsKB Makeyev Russia/CIS SSO
Tech
BADR-2 12/10/2001 70.0 SUPARCO Pakistan SUPARCO Pakistan SSO
Demo
MAROC- Royal Center for Technical University
12/10/2001 EO 45.0 Morocco Germany SSO
TUBSAT Remote Sensing of Berlin
Comm & Air Force Research NII Kosmicheskovo
Reflector 12/10/2001 7.0 USA Russia/CIS SSO
Positioning Laboratory Priborostroeniya
Russian Academy of
Kolibri 11/26/2001 Education 20.0 Russia/CIS LEO
Sciences
QuikTOMS 09/21/2001 EO 168.0 NASA USA SSO
177
NEC TOSHIBA
Tech
DASH 02/04/2002 86.0 JAXA Japan Space Systems, Japan GTO
Demo
Ltd.
Alsat 1 11/28/2002 EO 90.0 Algeria Algeria SSTL UK SSO
Tech Mozhaisky military Information
Mozhayets 11/28/2002 64.0 Russia/CIS Russia/CIS SSO
Demo academy Satellite Systems
Tech Space Innovation
FedSat 12/14/2002 58.0 CRCSS Australia UK SSO
Demo Limited
Chiba Institute of Chiba Institute of
WEOS 12/14/2002 Science 50.0 Japan Japan SSO
Technology Technology
Tech
-LabSat 12/14/2002 53.0 JAXA Japan JAXA Japan SSO
Demo
Tech
Rubin 2 12/20/2002 14.0 OHB Systems Germany OHB Systems Germany LEO
Demo
Tech Aprize Satellite
Latinsat A 12/20/2002 12.0 Argentina Aprize Satellite USA LEO
Demo Argentina
Tech Aprize Satellite
Latinsat B 12/20/2002 12.0 Argentina Aprize Satellite USA LEO
Demo Argentina
Tech KACST Space KACST Space
Saudisat 1C 12/20/2002 15.0 Saudi Arabia Saudi Arabia LEO
Demo Research Institute Research Institute
Tech
Unisat 2 12/20/2002 10.0 University of Rome Italy University of Rome Italy LEO
Demo
Hangtian Tsinghua
HTSTL 1 09/15/2002 50.0 Satellite Technology China SSO
Ltd.
Comm &
IDEFIX 05/04/2002 6.0 AMSAT-France France AMSAT-France France SSO
Positioning
CHIPSat 01/13/2003 Science 60.0 NASA USA SpaceDev, Inc. USA
Tech Air Force Research
XSS-10 01/29/2003 28.0 USAF USA USA LEO
Demo Laboratory
Czech Astronomical The Czech
MIMOSA 06/30/2003 Science 66.0 LEO
Institute Republic
Technical University Technical University
DTUsat 06/30/2003 Education 1.0 Denmark Denmark SSO
of Denmark of Denmark
MOST 06/30/2003 Science 51.3 CSA Canada Dynacon Canada SSO
178
Tokyo Institute of Tokyo Institute of
CUT E-I 06/30/2003 Education 1.0 Japan Japan SSO
Technology Technology
Quakesat 06/30/2003 Science 3.0 QuakeFinder USA Stanford University USA SSO
AAU CubeSat 06/30/2003 Education 1.0 Aalborg University Denmark Aalborg University Denmark SSO
University of
Can X-1 06/30/2003 Education 1.0 University of Toronto Canada Canada SSO
Toronto
CubeSat XI-
06/30/2003 Education 1.0 University of Tokyo Japan University of Tokyo Japan SSO
IV
SciSat 1 08/13/2003 Science 150.0 CSA Canada Bristol Aerospace Canada LEO
Tech
Rubin 4 09/27/2003 45.0 OHB Systems Germany OHB Systems Germany LEO
Demo
Tech
ST Sat 1 09/27/2003 100.0 KAIST S Korea SaTReC S Korea SSO
Demo
Tech Mozhaisky military Information
Mozhayets 4 09/27/2003 64.0 Russia/CIS Russia/CIS LEO
Demo academy Satellite Systems
BNSCSat 1 09/27/2003 EO 80.0 BNSC UK SSTL UK SSO
Nigeriasat 1 09/27/2003 EO 80.0 NASRDA Nigeria SSTL UK SSO
Bilsat 1 09/27/2003 EO 130.0 TUBITAK Turkey SSTL UK SSO
Tech
Naxing 1 04/18/2004 25.0 Tsinghua University China Tsinghua University China SSO
Demo
DEMETER 06/29/2004 Science 130.0 CNES France CNES France SSO
SaudiComsat Tech KACST Space KACST Space
06/29/2004 12.0 Saudi Arabia Saudi Arabia SSO
1 Demo Research Institute Research Institute
SaudiComsat Tech KACST Space KACST Space
06/29/2004 12.0 Saudi Arabia Saudi Arabia SSO
2 Demo Research Institute Research Institute
Tech KACST Space KACST Space
Saudisat 2 06/29/2004 35.0 Saudi Arabia Saudi Arabia SSO
Demo Research Institute Research Institute
Tech Aprize Satellite
Latinsat C 06/29/2004 15.0 Argentina Aprize Satellite USA SSO
Demo Argentina
Tech Aprize Satellite
Latinsat D 06/29/2004 15.0 Argentina Aprize Satellite USA SSO
Demo Argentina
Tech
Unisat 3 06/29/2004 12.0 University of Rome Italy University of Rome Italy SSO
Demo
Comm &
AMSat Echo 06/29/2004 12.0 AMSAT-NA USA AMSAT-NA USA SSO
Positioning
179
Tech
Nanosat 12/18/2004 15.0 INTA Spain INTA Spain SSO
Demo
Security & Ministry of Defense
Essaim 1 12/18/2004 120.0 France Astrium EU SSO
Military (France)
Security & Ministry of Defense
Essaim 2 12/18/2004 120.0 France Astrium EU SSO
Military (France)
Security & Ministry of Defense
Essaim 3 12/18/2004 120.0 France Astrium EU SSO
Military (France)
Security & Ministry of Defense
Essaim 4 12/18/2004 120.0 France Astrium EU SSO
Military (France)
PARASOL 12/18/2004 Science 120.0 CNES France CNES France SSO
Tech
KS5MF2 12/24/2004 50.0 NSAU Ukraine KB Yuzhnoye Ukraine
Demo
Air Force Research University of
Ralphie 12/21/2004 Education 24.0 USA USA
Laboratory Colorado
Air Force Research Arizona State
Sparky 12/21/2004 Education 21.0 USA USA
Laboratory University
Lomonosov Moscow Lomonosov Moscow
Tatiana 01/20/2005 30.0 Russia/CIS Russia/CIS LEO
State University State University
Sloshsat Tech National Aerospace
02/12/2005 127.0 EU EU Netherlands GTO
FLEVO Demo Laboratory
Tech
TNS-0 02/28/2005 5.0 Russia Russia/CIS Russia Russia/CIS LEO
Demo
Tech Air Force Research
XSS-11 04/11/2005 145.0 USA Lockheed Martin USA LEO
Demo Laboratory
Comm &
Hamsat 05/05/2005 42.5 AMSAT India India ISRO India LEO
Positioning
INDEX 08/23/2005 Science 70.0 JAXA Japan JAXA Japan SSO
China-DMC
10/27/2005 EO 150.0 Tsinghua University China SSTL UK SSO
4
Security &
TopSat 10/27/2005 115.0 BNSC UK SSTL UK SSO
Military
University of University of
UWE 1 10/27/2005 Education 1.0 Germany Germany SSO
Wurzburg Wurzburg
Sinah 1 10/27/2005 Tech 160.0 Iranian Research Iran PM Polyot Russia/CIS SSO
180
Demo Organisation for
Science & Technology
SSETI
10/27/2005 Education 77.0 SSETI EU SSETI EU SSO
Express
XI-V 10/27/2005 Education 1.0 University of Tokyo Japan University of Tokyo Japan SSO
Tech Mozhaisky military Information
Mozhayets 5 10/27/2005 90.0 Russia/CIS Russia/CIS SSO
Demo academy Satellite Systems
Tech
Cosmos 1 06/21/2005 40.0 Planetary Society USA NPO Lavochkin Russia/CIS
Demo
Norwegian
Norwegian Space University of
NCube 2 10/27/2005 Education 1.0 Norway Norway SSO
Centre Science and
Technology
Tech
ST5-A 03/22/2006 25.0 NASA USA NASA USA Elliptical
Demo
Tech
ST5-B 03/22/2006 25.0 NASA USA NASA USA Elliptical
Demo
Tech
ST5-C 03/22/2006 25.0 NASA USA NASA USA Elliptical
Demo
FORMOSAT- National Space Orbital Sciences
04/15/2006 EO 62.0 Taiwan USA Circular
3/COSMIC_A Program Office Corporation
FORMOSAT- National Space Orbital Sciences
04/15/2006 EO 62.0 Taiwan USA Circular
3/COSMIC_C Program Office Corporation
FORMOSAT- National Space Orbital Sciences
04/15/2006 EO 62.0 Taiwan USA Circular
3/COSMIC_D Program Office Corporation
FORMOSAT- National Space Orbital Sciences
04/15/2006 EO 62.0 Taiwan USA Circular
3/COSMIC_E Program Office Corporation
FORMOSAT- National Space Orbital Sciences
04/15/2006 EO 62.0 Taiwan USA Circular
3/COSMIC_F Program Office Corporation
COMPASS-2 05/27/2006 Science 80.0 Izmiran Russia/CIS LEO
Hokkaido Institute of Hokkaido Institute
HIT-SAT 09/22/2006 Education 2.7 Japan Japan
Technology of Technology
GeneSat-1 12/16/2006 Science 4.5 NASA USA NASA USA
Tech Air Force
FalconSat 2 03/24/2006 19.5 USAF USA USA
Demo Academy(USA)
181
CUTE- Tech Tokyo Institute of Tokyo Institute of
02/21/2006 3.8 Japan Japan
1.7+APD Demo Technology Technology
LAPAN- Tech Technical University
01/10/2007 56.0 LAPAN Germany SSO
TUBSAT Demo of Berlin
THEMIS 1 02/17/2007 Science 128.0 NASA USA Swales Aerospace USA Elliptical
THEMIS 2 02/17/2007 Science 128.0 NASA USA Swales Aerospace USA Elliptical
THEMIS 3 02/17/2007 Science 128.0 NASA USA Swales Aerospace USA Elliptical
THEMIS 4 02/17/2007 Science 128.0 NASA USA Swales Aerospace USA Elliptical
THEMIS 5 02/17/2007 Science 128.0 NASA USA Swales Aerospace USA Elliptical
Tech
MidSTAR-1 03/09/2007 118.0 US Naval Academy USA US Naval Academy USA
Demo
Tech
STPSat-1 03/09/2007 156.3 NRL USA LEO
Demo
Tech Air Force
FalconSat-3 03/09/2007 53.9 USA SpaceQuest, Ltd. USA
Demo Academy(USA)
Tech Los Alamos National
CFESat 03/09/2007 158.6 USA SSTL UK LEO
Demo Laboratory
National Authority for
Remote Sensing and
EgyptSat-1 04/17/2007 EO 100.0 Egypt Polar
Space Sciences
(Egypt)
KACST Space KACST Space
SaudiSat-3 04/17/2007 EO 200.0 Saudi Arabia Saudi Arabia Polar
Research Institute Research Institute
SaudiComsat- Tech KACST Space KACST Space
04/17/2007 15.0 Saudi Arabia Saudi Arabia SSO
7 Demo Research Institute Research Institute
SaudiComsat- Tech KACST Space KACST Space
04/17/2007 15.0 Saudi Arabia Saudi Arabia SSO
6 Demo Research Institute Research Institute
SaudiComsat- Tech KACST Space KACST Space
04/17/2007 15.0 Saudi Arabia Saudi Arabia SSO
5 Demo Research Institute Research Institute
SaudiComsat- Tech KACST Space KACST Space
04/17/2007 15.0 Saudi Arabia Saudi Arabia SSO
4 Demo Research Institute Research Institute
SaudiComsat- Tech KACST Space KACST Space
04/17/2007 15.0 Saudi Arabia Saudi Arabia SSO
3 Demo Research Institute Research Institute
Tech Tethers Unlimited, Tethers Unlimited,
MAST 04/17/2007 3.0 USA USA SSO
Demo Inc. Inc.
California
California Polytechnic
CP3 04/17/2007 Education 1.0 USA Polytechnic State USA SSO
State University
University
Universidad Sergio Universidad Sergio
LIBERTAD-1 04/17/2007 Education 1.0 Colombia Colombia SSO
Arboleda Arboleda
University of University of
CAPE1 04/17/2007 Education 1.0 USA USA SSO
Louisiana Louisiana
AVM 04/23/2007 185.0 ISRO India LEO
Orbital Sciences
AIM(SMEX9) 04/25/2007 Science 197.0 NASA USA USA LEO
Corporation
Zhejiang
Tech
University 05/25/2007 2.5 Zhejiang University China Zhejiang University China LEO
Demo
pico satellite
Tech University of
Can X-6 04/28/2008 6.5 University of Toronto Canada Canada
Demo Toronto
Cute- Tokyo Institute of Tokyo Institute of
04/28/2008 Science 5.0 Japan Japan Polar
1.7+APD II Technology Technology
Indian Mini
04/28/2008 EO 83.0 ISRO India ISRO SSO
Satellite-1
AAUSAT-II 04/28/2008 Education 0.7 Aalborg University Denmark Aalborg University Denmark Polar
Tech Delft University of The Delft University of
Delfi-C3 04/28/2008 6.5 Netherlands Polar
Demo Technology Netherlands Technology
Tech University of
Can X-2 04/28/2008 3.5 University of Toronto Canada Canada Polar
Demo Toronto
SEEDS 04/28/2008 Education 3.0 Nihon University Japan Nihon University Japan Polar
Tech
Rubin 8 04/28/2008 8.0 OHB Systems Germany OHB Systems Germany Polar
Demo
Orbcomm Comm &
06/19/2008 115.0 ORBCOMM USA OHB Systems Germany LEO
FM37 Positioning
Orbcomm Comm &
06/19/2008 115.0 ORBCOMM USA OHB Systems Germany LEO
FM38 Positioning
Orbcomm Comm &
06/19/2008 115.0 ORBCOMM USA OHB Systems Germany LEO
FM39 Positioning
Orbcomm Comm &
06/19/2008 115.0 ORBCOMM USA OHB Systems Germany LEO
FM40 Positioning
182
183
Orbcomm Comm &
06/19/2008 115.0 ORBCOMM USA OHB Systems Germany LEO
FM41 Positioning
Orbcomm- Comm &
06/19/2008 80.0 ORBCOMM USA OHB Systems Germany LEO
CDS3 Positioning
RapidEye #1 08/29/2008 EO 150.0 RapidEye AG Germany SSTL UK SSO
RapidEye #2 08/29/2008 EO 150.0 RapidEye AG Germany SSTL UK SSO
RapidEye #3 08/29/2008 EO 150.0 RapidEye AG Germany SSTL UK SSO
RapidEye #4 08/29/2008 EO 150.0 RapidEye AG Germany SSTL UK SSO
RapidEye #5 08/29/2008 EO 150.0 RapidEye AG Germany SSTL UK SSO
Ratsat(dumm Tech
09/28/2008 165.0 SpaceX USA SpaceX USA LEO
y payload) Demo
Tech
Trailblazer 08/03/2008 83.5 DoD USA SpaceDev, Inc. USA
Demo
Tech
PRISM 01/23/2009 8.0 University of Tokyo Japan University of Tokyo Japan Polar
Demo
Tech
SDS-1 01/23/2009 100.0 JAXA Japan JAXA Japan Polar
Demo
Tech
SOHLA-1 01/23/2009 50.0 SOHLA Japan JAXA Japan Polar
Demo
SPRITE-SAT 01/23/2009 Science 50.0 Tohoku University Japan Tohoku University Japan Polar
Tech
STARS 01/23/2009 8.0 Kagawa University Japan Kagawa University Japan Polar
Demo
Tokyo Metropolitan
Tokyo Metropolitan
College of
KKS-1 01/23/2009 Education 3.0 College of Industrial Japan Japan
Industrial
Technology
Technology
Tech
Omid 02/02/2009 25.0 Iran Iran Iran Iran
Demo
Security & Ministry of Defense
SPIRALE-A 02/12/2009 117.3 France Astrium EU Elliptical
Military (France)
Security & Ministry of Defense
SPIRALE-B 02/12/2009 117.3 France Astrium EU Elliptical
Military (France)
Tech
ANUSAT 04/20/2009 40.0 Anna University India Anna University India LEO
Demo
PharmaSat 05/19/2009 Science 4.6 NASA USA Stanford University USA LEO
184
Tech Hawk Institute for Hawk Institute for
HawkSat-1 05/19/2009 1.0 USA USA
Demo Space Sciences Space Sciences
California
California Polytechnic
CP 6 05/19/2009 Education 1.0 USA Polytechnic State USA
State University
University
Tech Aerospace Aerospace
AeroCube 3 05/19/2009 1.0 USA USA
Demo Corporation Corporation
RazakSAT 07/14/2009 EO 180.0 ATSB Malaysia Satrec Initiative S Korea LEO
Tech Texas A&M
DRAGONSat2 07/15/2009 15.0 Texas A&M University USA USA LEO
Demo University
Tech
DRAGONSat1 07/15/2009 15.0 University of Texas USA University of Texas USA LEO
Demo
ANDE-2
POLLUX 07/15/2009 Science 25.0 NRL USA LEO
SPHERE
Comm &
Sterkh 1 07/21/2009 170.0 Russia Russia/CIS PM Polyot Russia/CIS Polar
Positioning
Deimos 1 07/29/2009 EO 90.0 Deimos Imaging SL Spain SSTL UK Polar
Dubaisat 1 07/29/2009 EO 190.0 EIAST UAE Satrec Initiative S Korea Polar
UK-DMC2 07/29/2009 EO 96.5 SSTL UK SSTL UK Polar
Comm &
Aprizesat 3 07/29/2009 12.0 Aprize Satellite USA SpaceQuest, Ltd. USA Polar
Positioning
Tech
Nanosat 1B 07/29/2009 22.0 INTA Spain INTA Spain Polar
Demo
Comm &
Aprizesat 4 07/29/2009 12.0 Aprize Satellite USA SpaceQuest, Ltd. USA
Positioning
Tech Republic of South Republic of Stellenbosch
Sumbandila 09/17/2009 81.1 S Africa
Demo Africa South Africa University
Rubin-
Tech
9.1&Rubin- 09/23/2009 16.0 LuxSpace Luxembourg LuxSpace Luxembourg
Demo
9.2
Tech
Proba-2 11/02/2009 130.0 EU EU Verhaert Belgium SSO
Demo
Dongfanghong
Xi Wang-1 12/15/2009 60.0 China China China SSO
Satellite Co.
185
WASEDA-
05/20/2010 Education 1.2 Waseda University Japan Waseda University Japan LEO
SAT2
Negai 05/20/2010 Education 1.0 Soka University Japan Soka University Japan LEO
Kagoshima
KSAT 05/20/2010 Education 1.5 Kagoshima University Japan Japan LEO
University
Mars
UNITEC-1 05/20/2010 Education 21.0 UNISEC Japan UNISEC Japan Transfer
Orbit
PICARD 06/15/2010 Science 150.0 CNES France CNES France SSO
STSAT-2B 06/10/2010 Science 100.0 KARI South Korea SaTReC S Korea
Algerian National
Alsat 2A 07/12/2010 EO 116.0 Space Technology Algeria Astrium EU
Centre
Comm & Norwegian Space University of
AISSAT-1 07/12/2010 6.5 Norway Canada
Positioning Centre Toronto
Scuola Universitaria
TISAT-1 07/12/2010 Education 1.0 Professionale della Switzerland
Svizzera italiana
STUDSAT 07/12/2010 Education 1.0 Team STUDSAT India
Tech Ball Aerospace &
STPSat-2 11/20/2010 110.0 USAF USA USA LEO
Demo Technologies Corp.
Tech
FASTSAT 11/20/2010 148.0 NASA USA NASA USA LEO
Demo
Air Force
FalconSat-5 11/20/2010 Science 160.7 USA
Academy(USA)
Tech
FASTRAC-1 11/20/2010 23.1 University of Texas USA University of Texas USA
Demo
Tech
FASTRAC-2 11/20/2010 23.1 University of Texas USA University of Texas USA
Demo
O/OREOS 11/20/2010 Science 5.4 NASA USA NASA USA LEO
University of University of
RAX 11/20/2010 Science 3.0 USA USA
Michigan Michigan
Tech
NanoSail-D 11/20/2010 3.9 NASA USA NASA USA
Demo
Youthsat 04/20/2011 Science 92.0 ISRO India ISRO
186
Nanyang Nanyang
X-SAT 04/20/2011 EO 106.0 Technological Singapore Technological Singapore
University (NTU) University (NTU)
Malek-Ashtar Malek-Ashtar
Rasad 1 06/15/2011 EO 15.3 University of Iran University of Iran
Technology Technology
Tech Aerospace
PSSCT 2 07/08/2011 4 USAF USA USA
Demo Corporation
Tech Sapienza University Sapienza University
EduSAT 08/17/2011 10 Italy Itaria SSO
Demo of Rome of Rome
NigeriaSat-X 08/17/2011 EO 88.1 NASRDA Nigeria SSTL UK SSO
RASAT 08/17/2011 EO 93 TUBITAK Turkey TUBITAK Turkey SSO
National Space
Sich-2 08/17/2011 EO 176 Ukraine KB Yuzhnoye Ukraine SSO
Agency of Ukraine
Jugnu 10/12/2011 EO 3 IIT Kanpur India
SRMSat 10/12/2011 Education 10.9 SRM University India
Comm &
Vesselsat-1 10/12/2011 28.7 ORBCOMM USA LuxSpace Luxembourg
Positioning
AubieSat-1 10/28/2011 Education 1.03 Auburn University USA Auburn University USA
University of University of
RAX-2 10/28/2011 Science 2.8 USA USA
Michigan Michigan
Space Research
Space Research
Institute of the
Institute of the
Chibis-M 10/30/2011 Science 40 Russia/CIS Russian Academy Russia/CIS Circular
Russian Academy of
of
Sciences(RAN/IKI)
Sciences(RAN/IKI)
Security &
ELISA E12 12/17/2011 120 CNES France Astrium EU SSO
Military
Security &
ELISA E24 12/17/2011 120 CNES France Astrium EU SSO
Military
Security &
ELISA W11 12/17/2011 120 CNES France Astrium EU SSO
Military
Chilean Ministry of
SSOT 12/17/2011 EO 117 Chile Astrium EU SSO
National Defence
187
Comm &
Vesselsat-2 01/09/2012 28.6 ORBCOMM USA LuxSpace Sarl Luxembourg LEO
Positioning
Iran University of
Iranian Space
Navid 02/03/2012 EO 50 Science and Iran Iran LEO
Agency
Technology(IUST)
Tech University of
ALMASAT-1 02/13/2012 12.5 University of Bologna Italy Italy Elliptical
Demo Bologna
Polytechnic University Polytechnic
e-St@r 02/13/2012 Education 1 Italy Italy Elliptical
of Turin University of Turin
University of University of
Goliat 02/13/2012 Education 1 Romania Romania Elliptical
Bucharest Bucharest
Budapest University Budapest University
MaSat-1 02/13/2012 Education 1 of Technology and Hungary of Technology and Hungary Elliptical
Economics Economics
Warsaw University of Warsaw University
PW-Sat-1 02/13/2012 Education 1 Poland Poland Elliptical
Technology of Technology
University of University of
Robusta 02/13/2012 Education 1 France France Elliptical
Montpellier 2 Montpellier 2
UniCubeSat-
02/13/2012 Education 1 University of Rome Italy University of Rome Italy Elliptical
GG
National Institute for
Xatcobeo 02/13/2012 Education 1 Aerospace Spain University of Vigo Spain Elliptical
Technology (INTA)
National University of National University
Tech
Tiantuo-1 05/10/2012 9 Defense Technology China of Defense China
Demo
(NUDT) Technology (NUDT)
Tech Kyushu Institute of Kyushu Institute of
Horyu-2 05/17/2012 7.1 Japan Japan
Demo Technology Technology
Tech
SDS-4 05/17/2012 48 JAXA Japan JAXA Japan
Demo
COM DEV
exactView-1 07/22/2012 EO 100 Canada SSTL UK SSO
International
Federal Space
MKA-PN-1 07/22/2012 Science 110 Russia/CIS NPO Lavochkin Russia/CIS SSO
Agency(Russia)
Tech
TET-1 07/22/2012 120 DLR Germany Kayser-Threde Germany SSO
Demo
188
SFERA 08/01/2012 Science 9.2 Russia Russia/CIS LEO
Tech Osaka Institute of Osaka Institute of
PROITERES 09/09/2012 14 Japan Japan Polar
Demo Technology Technology
ORBCOMM Comm & Sierra Nevada
10/08/2012 142 ORBCOMM USA USA
Generation 2 Positioning Corporation
Tech
HummerSat-1 11/18/2012 160 CAST China CASC China SSO
Demo
Tech
XY 1 11/18/2012 140 China China CAST China SSO
Demo
Kwangmy 12/12/2012 EO 100 North Korea N Korea North Korea N Korea SSO
Tech
STSAT 2C 01/30/2013 100 MEST S Korea SaTReC S Korea Elliptical
Demo
AAUSat-3 02/25/2013 Education 0.8 Aalborg University Denmark Aalborg University Denmark SSO
BRITE-
02/25/2013 Science 14 University of Graz Austria UTIAS-SFL Canada SSO
AUSTRIA
Microsat Systems
NEOSSAT 02/25/2013 Science 65 CSA Canada Canada SSO
Canada Inc.(MSCI)
Department of MacDonald,
Security &
SAPPHIRE 02/25/2013 148 National Defense Canada Dettwiler and Canada SSO
Military
(Canada) Associates Ltd.
Tech
STRAND 1 02/25/2013 3.5 SSTL UK SSTL UK SSO
Demo
UNIBRITE 02/25/2013 Science 14 UTIAS-SFL Canada University of Vienna Austria SSO
ESTCube-1 05/07/2013 Education 1.33 University of Tartu Estonia University of Tartu Estonia SSO
Proba-V 05/07/2013 EO 138.2 EU EU QinetiQ Space Belgium SSO
IRIS 06/28/2013 Science 200 NASA USA Lockheed Martin USA SSO
189
XIII.
XIV.
XV.
XVI.
XVII.
XVIII.
XIX.
XX.
XXI.
XXII.
XXIII.
XXIV.
XXV.
XXVI.
Table A.2: CubeSat communications technology - part 1
*
.
*The original version of this Table can be found on http://www.klofas.com/comm-table/ . The Table has been divided in two parts for better visualization.
190
XXVII.
XXVIII.
XXIX.
XXX.
XXXI.
XXXII.
XXXIII.
XXXIV.
XXXV.
191
192
XXXVI.
XXXVII.
XXXVIII.
XXXIX.
Table A.2: CubeSat communications technology - part 2
193
194
195
APPENDIX: LIST OF ACRONYMS
ABC Aft Bulkhead Carrier
ACT Advanced Cooling Technologies
ADCS Attitude Determination and Control System
ADN Ammonium di-nitramide
AFB Air Force Base
AFSCN Air Force Satellite Control Network
ALASA Airborne Launch Assist Space Access
AMPS Additively Manufactured Propulsion System
APM Antenna Pointing Mechanisms
ARC Ames Research Center
ARCS Austrian Research Centres Seibersdoorf
ASIC Application Specific Integrated Circuits
ASRG Advanced Stirling Radioisotope Generator
ATCS Active Thermal Control System
BOL Beginning of Life
C&DH Command and Data Handling
CAN Controller Area Network
CAP C-Adapter Platform
CAT CubeSat Ambipolar Thruster
CDS CubeSat Design Specification
CMGs Control Moment Gyros
CNC Computer Numerical Controller
COTS Commercial off the shelf
CPU Computer Processing Unit
CSAC Chip-Scale Atomic Clocks
CSD Canisterized Satellite Dispenser
CTERA Coefficient Thermal Expansion Release Actuator
DARPA Defense Advanced Research Projects Agency
DET Direct Energy Transfer
DICE Dynamic Ionosphere CubeSat Experiment
DoD Department of Defense
DSS Deployable Space Systems, Inc.
E&M Electricity & Magnetism
EDM Electrical Discharge Machining
EIRP Effective Isotropic Radiated Power
EMC Electromagnetic Compatibility
EOL End of Life
EPS Electrical Power Systems
ESPA EELV Secondary Payload Adapter
196
FASTSAT Fast, Affordable, Science and Technology Satellite
FCC Federal Communications Commission
FPGA Field Programmable Gate Arrays
GENSO Global Educational Network for Satellite Operations
GEO Geostationary Orbit
GNSS Global Navigation Spacecraft Systems
GPIM Green Propellant Infusion Mission
GS Ground Station
HAN Hydroxyl Ammonium Nitrate
hi-rel High Reliability
HNF Hydrazinium Nitroformate
IC Integrated Circuits
IMPACT Integrated Micro Primary Atomic Clock Technology
Isp Specific Impulse
ISS International Space Station
J-SSOD Japanese Small Satellite Orbital Deployer
JEM Japanese Experiment Module
LEO Low Earth Orbit
LHP Large Homogeneous Portfolio
LPPTS-R Radiation Tolerant Low Power Precision Time Source
LS Laser Sintering
LV Launch Vehicle
MCC Mission Control Center
MCU Micro Controller Unit
MEMS Micro-Electromechanical systems
MEO Medium Earth Orbit
MiXI Miniature Xenon Ion Thruster
MLI Multi-Layer Insulation
MMRTG Multi-Mission RTG
MOC Mission Operations Center
MPACS Micro Propulsion Attitude Control System
MPAP Multiple Payload Adapter Plate
NEXT NLS Enabling eXploration & Technology
NLAS NanoSat Launch Adapter System
NLS NASA Launch Services
NOFB Nitrous Oxide Fuel Blend
NPSCul Naval Postgraduate Schools CubeSat Launcher
National Telecommunications and Information
NTIA
Administration
OMS Orbital Maneuvering System
OSAGS Open System of Agile Ground Stations
OSL Office of Space Launch
P-POD Poly Picosatellite Orbital Deployer
197
POCC Payload Operations Control Center
PPT Peak Power Tracking
PPT Pulsed Plasma Thrusters
PPUs Power Processing Units
PTCS Passive Thermal Control Systems
RAMPART RApidprototyped MEMS Propulsion and Radiation Test
RHU Radioisotope Heating Units
ROSA Roll-Out Solar Array
RTGs Radioisotope Thermal Generators
S/C Spacecraft
SADM Solar Array Drive Mechanism
SEP Solar Electric Propulsion
SnR Signal to Noise Ratio
SoA State of the Art
SOCC Spacecraft Operations Control Center
SpaceX Space Exploration Technologies
SpW SpaceWire
SRPS Small Radioisotope Power System
SSO Sun Synchronous Orbit
SSPS Spaceflight Secondary Payload System
SSTP Small Spacecraft Technology Program
SUM Six Unit Mount
TASC Triangular Advanced Solar Cell
TBD To Be Determined
TCS Thermal Control Systems
TID Total Ionizing Dose
TMR Triple Modular Redundancy
TRL Technology Readiness Level
TT&C Tracking, Telemetry and Command
UCSB University of California, Santa Barbara
USB Universal Serial Bus
You might also like
- F16 Flight ModelDocument4 pagesF16 Flight ModelendoparasiteNo ratings yet
- Drug Specification Named Entity Recognition Base On BiLSTM-CRF Model PDFDocument5 pagesDrug Specification Named Entity Recognition Base On BiLSTM-CRF Model PDFEduardo LacerdaNo ratings yet
- Rocket Propulsion and Spaceflight DynamicsDocument11 pagesRocket Propulsion and Spaceflight DynamicsUday Reddy0% (1)
- Simulation of Spacecraft Attitude and Orbit DynamicsDocument6 pagesSimulation of Spacecraft Attitude and Orbit DynamicsDan PhanNo ratings yet
- CADACFrameworkforAerospaceSimulations PDFDocument140 pagesCADACFrameworkforAerospaceSimulations PDFTim MarvinNo ratings yet
- A Classification of Adjectives For Polarity Lexicons EnhancementDocument5 pagesA Classification of Adjectives For Polarity Lexicons EnhancementacouillaultNo ratings yet
- Aw DD512 Manual G11 110928Document40 pagesAw DD512 Manual G11 110928rafa8607No ratings yet
- Employing A Domain Specific Ontology To Perform Semantic SearchDocument13 pagesEmploying A Domain Specific Ontology To Perform Semantic Searchmona4No ratings yet
- Possibility of Time TravelingDocument5 pagesPossibility of Time TravelingYudhitya 'Kiku' KusumawatiNo ratings yet
- Diff Classification and TaxonomyDocument8 pagesDiff Classification and Taxonomymanoj_thomas_9No ratings yet
- Ontology Mapping - An Integrated Approach: Abstract. Ontology Mapping Is Important When Working With More Than OneDocument15 pagesOntology Mapping - An Integrated Approach: Abstract. Ontology Mapping Is Important When Working With More Than OneIanus72No ratings yet
- Evaluating Semantic Relations by Exploring Ontologies On The Semantic WebDocument12 pagesEvaluating Semantic Relations by Exploring Ontologies On The Semantic WebMarta SabouNo ratings yet
- Generating Semantic AnnotationsDocument78 pagesGenerating Semantic AnnotationsPal Vadasz100% (1)
- Sparql 1 1 Cheat SheetDocument18 pagesSparql 1 1 Cheat SheetGonçalo PalaioNo ratings yet
- 013 State DiagramsDocument30 pages013 State Diagramsvidhya_bineeshNo ratings yet
- An Integrated Approach To Extracting Ontological SDocument16 pagesAn Integrated Approach To Extracting Ontological SMaría MarchianoNo ratings yet
- Knowledge RepresentationDocument10 pagesKnowledge Representationrotago6843No ratings yet
- Simple Knowledge Organization System (SKOS) in 10 PointsDocument11 pagesSimple Knowledge Organization System (SKOS) in 10 PointsKaren Tinajero-VazquezNo ratings yet
- Topic 1 Overview of Intelligent SystemsDocument35 pagesTopic 1 Overview of Intelligent SystemsPurvi ChaurasiaNo ratings yet
- Mathematical Models For A Missile Autopilot DesignDocument46 pagesMathematical Models For A Missile Autopilot DesignManoj ChoudharyNo ratings yet
- Part I: Introduction 1 Why Study Automata Theory? 2 Languages and StringsDocument22 pagesPart I: Introduction 1 Why Study Automata Theory? 2 Languages and StringsMunirul FSNo ratings yet
- Aircraft Vehicle Systems Modelling and Simulation Under UncertaintyDocument64 pagesAircraft Vehicle Systems Modelling and Simulation Under Uncertaintyjakub_gramolNo ratings yet
- Keyphrase Extraction (3rd Review)Document22 pagesKeyphrase Extraction (3rd Review)gowtham1990No ratings yet
- Ontology Visualization Protégé Tools - A ReviewDocument11 pagesOntology Visualization Protégé Tools - A ReviewijaitjournalNo ratings yet
- Monte Carlo TechniquesDocument6 pagesMonte Carlo Techniquesentr200No ratings yet
- 024 KnowledgeRepresentationMethods (Puhr)Document18 pages024 KnowledgeRepresentationMethods (Puhr)anwarussaeedNo ratings yet
- Comparative Study of Text Summarization MethodsDocument6 pagesComparative Study of Text Summarization Methodshagar.hesham.extNo ratings yet
- An Approach To Owl Concept Extraction and Integration Across Multiple OntologiesDocument19 pagesAn Approach To Owl Concept Extraction and Integration Across Multiple OntologiesijwestNo ratings yet
- Space NewsDocument298 pagesSpace NewsKamalanathan KasparNo ratings yet
- Abstractive Text Summary Generation With Knowledge Graph RepresentationDocument9 pagesAbstractive Text Summary Generation With Knowledge Graph RepresentationPrachurya NathNo ratings yet
- Contextual Topic Discovery Using Unsupervised Keyphrase Extraction and Hierarchical Semantic Graph ModelDocument19 pagesContextual Topic Discovery Using Unsupervised Keyphrase Extraction and Hierarchical Semantic Graph Modelياسر سعد الخزرجيNo ratings yet
- Presented By: Arpit Goel (51998 Internal Guide: Dr. Sanjay Mathur (Head of ECE Dept.)Document42 pagesPresented By: Arpit Goel (51998 Internal Guide: Dr. Sanjay Mathur (Head of ECE Dept.)Arpit GoyalNo ratings yet
- A Domain-Specific Automatic Text Summarization Using Fuzzy LogicDocument13 pagesA Domain-Specific Automatic Text Summarization Using Fuzzy LogicIAEME PublicationNo ratings yet
- Expert Systems With Applications: David Sánchez, Montserrat Batet, David Isern, Aida VallsDocument11 pagesExpert Systems With Applications: David Sánchez, Montserrat Batet, David Isern, Aida VallsSendari NoviaNo ratings yet
- Top-Down and Bottom-Up ParsingDocument23 pagesTop-Down and Bottom-Up ParsingvanithaarivuNo ratings yet
- Space Robotics Seminar ReportDocument29 pagesSpace Robotics Seminar ReportRockey RoockNo ratings yet
- 18-08-Todoist Setup GuideDocument14 pages18-08-Todoist Setup GuideNickNo ratings yet
- Semantic - Based Querying Using Ontology in Relational Database of Library Management SystemDocument12 pagesSemantic - Based Querying Using Ontology in Relational Database of Library Management SystemijwestNo ratings yet
- Space RoboticsDocument20 pagesSpace RoboticsDADE ZUBERNo ratings yet
- Search Engine TechniquesDocument10 pagesSearch Engine TechniquesSrikanth AryanNo ratings yet
- What Is OntologyDocument7 pagesWhat Is OntologyNorashikin Ahmad100% (1)
- Start and End Dates For Recurring Tasks: Type This: To Add This Recurring Due DateDocument2 pagesStart and End Dates For Recurring Tasks: Type This: To Add This Recurring Due DateMilan DelićNo ratings yet
- A Survey of Semantic Based Solutions To Web MiningDocument8 pagesA Survey of Semantic Based Solutions To Web MiningInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Architecture For Self-Fabricating Space SystemsDocument17 pagesAn Architecture For Self-Fabricating Space SystemsWalfarid LimbongNo ratings yet
- Ontology Mapping Based On Similarity Measure and Fuzzy LogicDocument5 pagesOntology Mapping Based On Similarity Measure and Fuzzy LogicharzaghiNo ratings yet
- Chapter 3 - Syntax AnalysisDocument88 pagesChapter 3 - Syntax AnalysisAnonymous zDRmfIpGfNo ratings yet
- Spacex BrochureDocument7 pagesSpacex BrochureLuigiNo ratings yet
- Text SummerizationDocument11 pagesText SummerizationDejene TechaneNo ratings yet
- Mining Structures of Factual Knowledge From Text - 9781681733937 - WEB PDFDocument199 pagesMining Structures of Factual Knowledge From Text - 9781681733937 - WEB PDFsomnath_iiiNo ratings yet
- Keplers LawDocument28 pagesKeplers LawMoiz HussainNo ratings yet
- An Intersection of Agile, Lean & IBM Design ThinkingDocument5 pagesAn Intersection of Agile, Lean & IBM Design ThinkingMinh Tân100% (1)
- Iss Operating An Outpost TaggedDocument438 pagesIss Operating An Outpost TaggedGerardNo ratings yet
- Word Semantics, Sentence Semantics and Utterance SemanticsDocument11 pagesWord Semantics, Sentence Semantics and Utterance SemanticsАннаNo ratings yet
- Semantic Web DissertationDocument4 pagesSemantic Web DissertationCanYouWriteMyPaperForMeUK100% (1)
- Spacecraft Propulsion: The Necessity For Propulsion SystemDocument17 pagesSpacecraft Propulsion: The Necessity For Propulsion SystemfunfrancisNo ratings yet
- Small Spacecraft Technology State of The Art 2014 PDFDocument211 pagesSmall Spacecraft Technology State of The Art 2014 PDFKarimTaha100% (1)
- Small Spacecraft Technology State of The Art 2014Document211 pagesSmall Spacecraft Technology State of The Art 2014Don Marco ObispoNo ratings yet
- TemplateDocument8 pagesTemplateArul PrakashNo ratings yet
- 2018-UTM UAS TCL4 Sprint2 Report v2Document24 pages2018-UTM UAS TCL4 Sprint2 Report v2Ziwei LiuNo ratings yet
- 2014-UTM-Enabling Low-Altitude Airspace and Uas OperationsDocument20 pages2014-UTM-Enabling Low-Altitude Airspace and Uas OperationsWANGJIANNANNo ratings yet
- BPD - Unit IDocument33 pagesBPD - Unit IPeraka Naga Siva Pavani ce18e013No ratings yet
- THERMICA Manifolds With Hydraulic SeparatorsDocument8 pagesTHERMICA Manifolds With Hydraulic Separatorsichim danNo ratings yet
- OTC 18839 - Reverse-Circulation Cementing To Seal A Tight Liner Lap PDFDocument10 pagesOTC 18839 - Reverse-Circulation Cementing To Seal A Tight Liner Lap PDFAndresNo ratings yet
- VALVEDocument10 pagesVALVEAl AminNo ratings yet
- Presentation of Turbine Erection 1Document42 pagesPresentation of Turbine Erection 1Anubhav Singhal75% (4)
- OFC TechnologyDocument52 pagesOFC TechnologyBattinapati ShivaNo ratings yet
- Aanenvaimennin EsiteDocument3 pagesAanenvaimennin Esiteruben estebanNo ratings yet
- msebDocument2 pagesmsebbasitNo ratings yet
- Pak Country en Excel v2Document579 pagesPak Country en Excel v2Diana RoseyNo ratings yet
- g8 T2L1 Electric ForceDocument32 pagesg8 T2L1 Electric Forcemobea2010No ratings yet
- Case Study-R12 12Document81 pagesCase Study-R12 12ranjitpandeyNo ratings yet
- Poly (Vinyl Chloride) (PVC) Plastic Pipe, Schedules 40, 80, and 120Document11 pagesPoly (Vinyl Chloride) (PVC) Plastic Pipe, Schedules 40, 80, and 120Flor PeraltaNo ratings yet
- Controls, Start-Up, Operation, Service and Troubleshooting: Aquaforce 30Xw150-400 Water-Cooled Liquid ChillersDocument172 pagesControls, Start-Up, Operation, Service and Troubleshooting: Aquaforce 30Xw150-400 Water-Cooled Liquid ChillersWagner MoraisNo ratings yet
- Hitra Procedure Kz01 CG Pro 53 0113 A02Document41 pagesHitra Procedure Kz01 CG Pro 53 0113 A02odeinat100% (1)
- 51X200, 51X250,51X500Document72 pages51X200, 51X250,51X500Jamrud D'SeekersofLoph100% (1)
- Series: Suitable For Address Reading and Sensing Cut-Off MarksDocument4 pagesSeries: Suitable For Address Reading and Sensing Cut-Off MarksAntony Jim Ferrari SilvaNo ratings yet
- Declaration of ConformityDocument1 pageDeclaration of ConformityhamadaeidNo ratings yet
- Simulation Model of at Plate Solar Collector Performance: February 2011Document20 pagesSimulation Model of at Plate Solar Collector Performance: February 2011Meryem BenNo ratings yet
- Rationale For Unrelated Product Diversification For Indian FirmsDocument10 pagesRationale For Unrelated Product Diversification For Indian FirmsarcherselevatorsNo ratings yet
- No. 511916, Patented Jan. 2, 1894,: N TeslaDocument6 pagesNo. 511916, Patented Jan. 2, 1894,: N TeslaVince GiustiNo ratings yet
- EGPM10-H2S-I-DAT-001 H2S DetectorsDocument1 pageEGPM10-H2S-I-DAT-001 H2S DetectorsdrkongalaNo ratings yet
- Buet Steel Article On RRMDocument10 pagesBuet Steel Article On RRMElafanNo ratings yet
- 업무보고서 20140901 - CNSLDocument7 pages업무보고서 20140901 - CNSLJi Eun LeeNo ratings yet
- Asutosh Mahapatro Updated CV, ResumDocument9 pagesAsutosh Mahapatro Updated CV, ResumJobs SuryaNo ratings yet
- Sheet of CondenserDocument2 pagesSheet of CondenserSafaa Hameed Al NaseryNo ratings yet
- External Transport Process in Heterogeous ReactionsDocument9 pagesExternal Transport Process in Heterogeous Reactionscebajamundi100% (3)
- Articol Conversie ElectricaDocument8 pagesArticol Conversie ElectricaMirceaNo ratings yet
- Local Knowledge - Case Studies of Four Innovative PlacesDocument50 pagesLocal Knowledge - Case Studies of Four Innovative PlacesGiorgio BertiniNo ratings yet
- Brahma MF2 PDFDocument4 pagesBrahma MF2 PDFamicarelliNo ratings yet
- AMF4.0 - User ManualDocument11 pagesAMF4.0 - User ManualKhaleel Khan100% (1)