Download as pdf or txt
You might also like
- FFG Deathwatch - Primaris CharactersDocument4 pagesFFG Deathwatch - Primaris CharactersBrad100% (1)
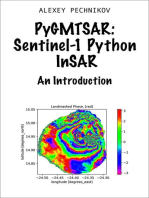
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- AFI31-501 USAF Clearance - SecurityDocument125 pagesAFI31-501 USAF Clearance - SecurityzelosssNo ratings yet
- Loosely Coupled GPS INS Integration With Kalman Filtering For Land Vehicle ApplicationsDocument6 pagesLoosely Coupled GPS INS Integration With Kalman Filtering For Land Vehicle Applicationstolgacakir185No ratings yet
- INS-Camera Calibration Without Ground Control Points: Daniel Bender, Marek Schikora, J Urgen Sturm and Daniel CremersDocument6 pagesINS-Camera Calibration Without Ground Control Points: Daniel Bender, Marek Schikora, J Urgen Sturm and Daniel Cremersqwerrty1029384756No ratings yet
- Sensors: Performance Analysis of Constrained Loosely Coupled GPS/INS Integration SolutionsDocument25 pagesSensors: Performance Analysis of Constrained Loosely Coupled GPS/INS Integration SolutionsAlvaroFernandezVillarNo ratings yet
- Multi-Sensor Data Fusion of DCM Based Orientation Estimation For Land VehiclesDocument6 pagesMulti-Sensor Data Fusion of DCM Based Orientation Estimation For Land VehiclesSemih AteşNo ratings yet
- Node 3Document3 pagesNode 3FasilzebibaNo ratings yet
- EScholarship UC Idedtem 5s740738Document28 pagesEScholarship UC Idedtem 5s740738Guillermo Soto ZuñigaNo ratings yet
- Estimation of IMU and MARG Orientation Using A Gradient Descent AlgorithmDocument7 pagesEstimation of IMU and MARG Orientation Using A Gradient Descent AlgorithmAchillesNo ratings yet
- A Review of Navigation Systems (Integration and Algorithms)Document17 pagesA Review of Navigation Systems (Integration and Algorithms)amguardia100% (1)
- Sensor FusionDocument5 pagesSensor FusionKeerthana AtchutuniNo ratings yet
- Odometry Fusion IMU - 1.5066524Document9 pagesOdometry Fusion IMU - 1.5066524flv_91No ratings yet
- Kinematic Positioning With An Integrated GPS/Pseudolite/INS: Hung Kyu Lee, Jinling Wang, Chris RizosDocument12 pagesKinematic Positioning With An Integrated GPS/Pseudolite/INS: Hung Kyu Lee, Jinling Wang, Chris RizosTeguh OktaprimaNo ratings yet
- Vehicle Sideslip and Roll Parameter Estimation Using GPSDocument8 pagesVehicle Sideslip and Roll Parameter Estimation Using GPSstefanovicana1No ratings yet
- Particle Filter Data Fusion Enhancements For Mems-Imu/Gps: Yafei Ren, Xizhen KeDocument5 pagesParticle Filter Data Fusion Enhancements For Mems-Imu/Gps: Yafei Ren, Xizhen Kenassr_ismailNo ratings yet
- Weiss 11 RealDocument7 pagesWeiss 11 RealVũ Tiến DũngNo ratings yet
- 4 FrancajuniorMorgadoDocument10 pages4 FrancajuniorMorgadoAdetoro Mal PascalNo ratings yet
- A Method of Getting Sag of Power Transmission Line From DSP of Gps MeasurementsDocument10 pagesA Method of Getting Sag of Power Transmission Line From DSP of Gps MeasurementsBhaskar Dutta KarmakarNo ratings yet
- Kalman Filter For Control of SattelitesDocument6 pagesKalman Filter For Control of SattelitesHari B SubediNo ratings yet
- Digital Magnetic Compass and Gyroscope IntegrationDocument10 pagesDigital Magnetic Compass and Gyroscope IntegrationJosé Fernando Velázquez DamiánNo ratings yet
- Fuzzy Adaptive Kalman Filtering For INS/GPS Data Fusion: February 2000Document7 pagesFuzzy Adaptive Kalman Filtering For INS/GPS Data Fusion: February 2000alfaristelecomNo ratings yet
- A Multi-State Constraint Kalman FilterDocument8 pagesA Multi-State Constraint Kalman Filteradeelakram03No ratings yet
- A Sensor Fusion Algorithm For Cooperative LocalizationDocument8 pagesA Sensor Fusion Algorithm For Cooperative LocalizationVijaya YajnanarayanaNo ratings yet
- GPS INS Urban SettingDocument9 pagesGPS INS Urban SettingLogesan SrinivasaluNo ratings yet
- Redundant Imus For Precise Trajectory DeterminationDocument7 pagesRedundant Imus For Precise Trajectory DeterminationKobalt von KriegerischbergNo ratings yet
- Visual SLAM For Flying Vehicles: Bastian Steder Giorgio Grisetti Cyrill Stachniss Wolfram BurgardDocument5 pagesVisual SLAM For Flying Vehicles: Bastian Steder Giorgio Grisetti Cyrill Stachniss Wolfram BurgardAnjana AravindNo ratings yet
- INS/magnetometer Integrated Positioning Based On Neural Network For Bridging Long Time GPS OutagesDocument11 pagesINS/magnetometer Integrated Positioning Based On Neural Network For Bridging Long Time GPS OutagesBetty SunNo ratings yet
- Articulo OK VerDocument7 pagesArticulo OK VeryuniervNo ratings yet
- A Simple Observer For Gyro and Accelerometer Biases in Land Navigation SystemsDocument14 pagesA Simple Observer For Gyro and Accelerometer Biases in Land Navigation Systemsdewe sunNo ratings yet
- Cs 3422872295Document9 pagesCs 3422872295IJMERNo ratings yet
- On The Location Accuracy of The Multi-AntennaDocument5 pagesOn The Location Accuracy of The Multi-Antennaاحمد نديم اسماعيلNo ratings yet
- Development of AHRS (Attitude and Heading Reference System) For Autonomous UAV (Unmanned Aerial Vehicle)Document4 pagesDevelopment of AHRS (Attitude and Heading Reference System) For Autonomous UAV (Unmanned Aerial Vehicle)khidirtayNo ratings yet
- Robot Localization Using Relative and Absolute Position EstimatesDocument7 pagesRobot Localization Using Relative and Absolute Position Estimatesengineer86No ratings yet
- (J) 2022 - User Position Affected by Outlier A Case Study of Moving-Horizon Estimation FilterDocument11 pages(J) 2022 - User Position Affected by Outlier A Case Study of Moving-Horizon Estimation Filterdr.awawdeh.moathNo ratings yet
- Vidal Etal Icra2006Document7 pagesVidal Etal Icra2006madupiz@gmailNo ratings yet
- Sensors: An Integration of GPS With INS Sensors For Precise Long-Baseline Kinematic PositioningDocument15 pagesSensors: An Integration of GPS With INS Sensors For Precise Long-Baseline Kinematic PositioningtangphamvanNo ratings yet
- Aircraft Airborne Navigation IDocument104 pagesAircraft Airborne Navigation IRifki FirnandoTPPU 1No ratings yet
- Study of Inertial Measurement Unit SensorDocument4 pagesStudy of Inertial Measurement Unit SensorĐinh Hữu KiênNo ratings yet
- D AdaptiveKalman Sensors 19 01142 v2Document24 pagesD AdaptiveKalman Sensors 19 01142 v2German QuirozNo ratings yet
- Circumventing Dynamic Modeling Evaluation of The Error-State PDFDocument8 pagesCircumventing Dynamic Modeling Evaluation of The Error-State PDFvaseem akramNo ratings yet
- 140 1462512792 - 06-05-2016 PDFDocument4 pages140 1462512792 - 06-05-2016 PDFEditor IJRITCCNo ratings yet
- Investigation of Collision Avoidance and Localization in WSNsDocument15 pagesInvestigation of Collision Avoidance and Localization in WSNsAIRCC - IJCNCNo ratings yet
- Analyse of MEMS Based Inertial Sensors Parameters For Land Vehicle Navigation ApplicationDocument5 pagesAnalyse of MEMS Based Inertial Sensors Parameters For Land Vehicle Navigation ApplicationminhaaaNo ratings yet
- GyrosDocument6 pagesGyrosversineNo ratings yet
- Autonomous Landing of An Unmanned Helicopter Based On Vision and Inertial SensingDocument11 pagesAutonomous Landing of An Unmanned Helicopter Based On Vision and Inertial SensingKarthik NiyanthaNo ratings yet
- IMU Signal Generator Based On Dual Quaternion InteDocument18 pagesIMU Signal Generator Based On Dual Quaternion IntebrightprojectrussiaNo ratings yet
- Real-Time Radar SLAM: 11. Workshop Fahrerassistenzsysteme Und Automatisiertes FahrenDocument10 pagesReal-Time Radar SLAM: 11. Workshop Fahrerassistenzsysteme Und Automatisiertes FahrenAsmaa HassanNo ratings yet
- Hybrid Inertial and Vision Tracking For Augmented Reality RegistrationDocument8 pagesHybrid Inertial and Vision Tracking For Augmented Reality RegistrationAjay HarishNo ratings yet
- 1 s2.0 S0888327018301043 MainDocument17 pages1 s2.0 S0888327018301043 MainSemih AteşNo ratings yet
- Integrated Vehicle Accident Detection and Location System: Telkomnika DOI: 10.12928/TELKOMNIKA.v12i1.1787Document6 pagesIntegrated Vehicle Accident Detection and Location System: Telkomnika DOI: 10.12928/TELKOMNIKA.v12i1.1787defConNo ratings yet
- Strap Down AlignmentDocument12 pagesStrap Down Alignmentwolfpackno9985No ratings yet
- Zheng MEMS2016Document12 pagesZheng MEMS2016chaker AdrianoNo ratings yet
- Sensors 19 05177 v2Document21 pagesSensors 19 05177 v2mezianeNo ratings yet
- Comparison of RBF and BPN Neural Networks Applied in INS and GPS Integration For Vehicular NavigationDocument12 pagesComparison of RBF and BPN Neural Networks Applied in INS and GPS Integration For Vehicular Navigationdcrustradheshyam1984No ratings yet
- The Role of Kalman Filter in The ModelliDocument7 pagesThe Role of Kalman Filter in The ModelliivicaNo ratings yet
- Hyun Hak Cho 2013Document6 pagesHyun Hak Cho 2013huy.tranvugia1305No ratings yet
- Adaptive Precision Geolocation Algorithm With Multiple Model UncertaintiesDocument15 pagesAdaptive Precision Geolocation Algorithm With Multiple Model Uncertaintieskj185No ratings yet
- ISARDocument11 pagesISARGouse BujjiNo ratings yet
- Simulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathDocument6 pagesSimulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathIon TomitaNo ratings yet
- IMU CharacterizationDocument8 pagesIMU CharacterizationWill BlackNo ratings yet
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- MIL-STD-781C and Confidence Intervals On MTBF PDFDocument49 pagesMIL-STD-781C and Confidence Intervals On MTBF PDFrab__bitNo ratings yet
- Poetry Research Paper d2Document7 pagesPoetry Research Paper d2api-256449476No ratings yet
- Building A Blimp in 1/144 ScaleDocument4 pagesBuilding A Blimp in 1/144 ScaleduesenNo ratings yet
- Bureaucracy in IndiaDocument16 pagesBureaucracy in IndiaNalini PatnaikNo ratings yet
- Peelian Principle 1: ": "The Nine Peelian Principles"Document6 pagesPeelian Principle 1: ": "The Nine Peelian Principles"Vince De JesusNo ratings yet
- ANewEnglishGrammar 10015445Document531 pagesANewEnglishGrammar 10015445梅楠梓No ratings yet
- Geanhs Sf4-August 2019Document1 pageGeanhs Sf4-August 2019Chay BetchayNo ratings yet
- Dtic Ada354082 TextDocument235 pagesDtic Ada354082 TextPéricles Ferreira Leite100% (1)
- Specifications of A Naval ShipDocument13 pagesSpecifications of A Naval ShipSiddharth Narayanan ChidambareswaranNo ratings yet
- THE COLD WAR-WPS OfficeDocument5 pagesTHE COLD WAR-WPS OfficeReynold N. AlbaNo ratings yet
- Karmen BizetDocument31 pagesKarmen BizetkatoblepaNo ratings yet
- GeneralAwareness MBA MCQ Sample SUATDocument1 pageGeneralAwareness MBA MCQ Sample SUATJAI SHARMANo ratings yet
- Gen Ratko Mladic Ordered Rapes of Women & Massacre of Men/Boys in Srebrenica GenocideDocument3 pagesGen Ratko Mladic Ordered Rapes of Women & Massacre of Men/Boys in Srebrenica GenocideSrebrenica Genocide LibraryNo ratings yet
- The U.S. M1911 M1911A1 Pistols and Commercial M1911 Type Pistols - A Shop Manual (PDFDrive) - Unlocked-8Document15 pagesThe U.S. M1911 M1911A1 Pistols and Commercial M1911 Type Pistols - A Shop Manual (PDFDrive) - Unlocked-8Violeta Sosa rosarioNo ratings yet
- The - Four - Noble - Truths - Mahasi SayadawDocument346 pagesThe - Four - Noble - Truths - Mahasi SayadawAustin Than AungNo ratings yet
- Analysis 1 GeographicalDocument2 pagesAnalysis 1 GeographicalLexie TrầnNo ratings yet
- Sij Acroni - MTC 2Document4 pagesSij Acroni - MTC 2betabarathNo ratings yet
- BPOPS Plan 2018-2020newDocument4 pagesBPOPS Plan 2018-2020newHenry Baliar100% (6)
- Role and Impact of MRD Movement in Pakistan's Politics (1981-1988)Document6 pagesRole and Impact of MRD Movement in Pakistan's Politics (1981-1988)ZAK TechnologyNo ratings yet
- CN 3Document7 pagesCN 3pavi cNo ratings yet
- Draganfly Motorcycles: E F N P G MDocument2 pagesDraganfly Motorcycles: E F N P G MPeter SeifterNo ratings yet
- 02 Smartness and Good OrderDocument10 pages02 Smartness and Good OrderMEOW41100% (3)
- Chapter 11 - St. John AmbulanceDocument8 pagesChapter 11 - St. John Ambulancedkgu100% (1)
- ProveeDocument285 pagesProveeesneyder ardilaNo ratings yet
- J.D, SindDocument32 pagesJ.D, SindNOORULFALEELANo ratings yet
- Lea For PRC LicenseDocument17 pagesLea For PRC LicenseArnold Zabate AparicioNo ratings yet
- Read ListDocument19 pagesRead ListSophie Grace GriffinNo ratings yet
- Ka 'Elele - 12 Pages MagazineDocument8 pagesKa 'Elele - 12 Pages MagazineGrassroot InstituteNo ratings yet