Var Pres
Var Pres
Download as pdf or txt
You might also like
- Signals-and-Systems - Basics & Formula HandbookDocument19 pagesSignals-and-Systems - Basics & Formula HandbookKALAIMATHI100% (15)
- The Index Trading Course - FontanillsDocument432 pagesThe Index Trading Course - Fontanillskaddour7108100% (1)
- DFA AnalysisDocument43 pagesDFA AnalysisfahadkhanffcNo ratings yet
- Physics Annual PlanDocument60 pagesPhysics Annual Plan112233445566778899 998877665544332211100% (3)
- Biology IADocument5 pagesBiology IALevie Arlius Lie0% (2)
- 2018 ME131 - Thermodynamics 1 RDUDocument4 pages2018 ME131 - Thermodynamics 1 RDUJamiel CatapangNo ratings yet
- Advanced Econometrics: Based On The Textbook by Verbeek: A Guide To Modern EconometricsDocument27 pagesAdvanced Econometrics: Based On The Textbook by Verbeek: A Guide To Modern EconometricsRenato Salazar RiosNo ratings yet
- Var ProcessDocument13 pagesVar ProcessmdashrafalamNo ratings yet
- Advanced Econometrics: Based On The Textbook by Verbeek: A Guide To Modern EconometricsDocument48 pagesAdvanced Econometrics: Based On The Textbook by Verbeek: A Guide To Modern EconometricsRenato Salazar RiosNo ratings yet
- Advanced Econometrics: Based On The Textbook by Verbeek: A Guide To Modern EconometricsDocument24 pagesAdvanced Econometrics: Based On The Textbook by Verbeek: A Guide To Modern EconometricsRenato Salazar RiosNo ratings yet
- Vector Autoregressions: How To Choose The Order of A VARDocument8 pagesVector Autoregressions: How To Choose The Order of A VARv4nhuy3nNo ratings yet
- Ca07 RgIto TalkDocument25 pagesCa07 RgIto Talkssaurabh26jNo ratings yet
- VAR, SVAR and SVEC Models: Implementation Within R Package VarsDocument32 pagesVAR, SVAR and SVEC Models: Implementation Within R Package Varsbenz jarjitNo ratings yet
- Time Series - Woolridge CH 11 - TD - Student Version-1Document27 pagesTime Series - Woolridge CH 11 - TD - Student Version-1Rabeya AktarNo ratings yet
- Sta 445 1 Stationarity and Non-StationarityDocument15 pagesSta 445 1 Stationarity and Non-StationarityfreemancenzoNo ratings yet
- 2 JurnalDocument15 pages2 JurnalAri IrhamNo ratings yet
- Econometrics For Finance Ch6Document10 pagesEconometrics For Finance Ch6haminjohn15No ratings yet
- Complete Convergence of ENDDocument13 pagesComplete Convergence of ENDhiếu hữuNo ratings yet
- Station A RityDocument18 pagesStation A RityStiven RodriguezNo ratings yet
- Forecasting and VAR Models - PresentationDocument11 pagesForecasting and VAR Models - PresentationFranz EignerNo ratings yet
- Stationary Random SeriesDocument14 pagesStationary Random Serieskipropnathan15No ratings yet
- SSRN Id1404905 PDFDocument20 pagesSSRN Id1404905 PDFalexa_sherpyNo ratings yet
- PDF 4Document11 pagesPDF 4shrilaxmi bhatNo ratings yet
- EC6303 NotesDocument73 pagesEC6303 NotesECEOCETNo ratings yet
- SSRN FinanceDocument20 pagesSSRN FinancepasaitowNo ratings yet
- Black-Box Identification of MIMO Transfer Functions: Asymptotic Properties of Prediction Error ModelsDocument33 pagesBlack-Box Identification of MIMO Transfer Functions: Asymptotic Properties of Prediction Error Modelsnagaraj0710No ratings yet
- 3706 Cavin AS5 RandomWalkProcesses CE2 Feb 23Document13 pages3706 Cavin AS5 RandomWalkProcesses CE2 Feb 23Anonymous ReaperNo ratings yet
- OscillatorsDocument15 pagesOscillatorsdamilolaa_xNo ratings yet
- Time Series and Stochastic ProcessesDocument46 pagesTime Series and Stochastic ProcessesSana ElahyNo ratings yet
- Time-Series Analysis in The Frequency DomainDocument15 pagesTime-Series Analysis in The Frequency DomainPatyNo ratings yet
- Fon Ull 2024 NODEADocument28 pagesFon Ull 2024 NODEAWahid UllahNo ratings yet
- Ptspunit 5notesDocument7 pagesPtspunit 5notesbtechgamingwallaNo ratings yet
- Econ 3 - Time SeriesDocument28 pagesEcon 3 - Time Seriesl237345No ratings yet
- Vector Autoregressive Models: T T 1 T 1 P T P T TDocument4 pagesVector Autoregressive Models: T T 1 T 1 P T P T Tmpc.9315970No ratings yet
- Conditional ExpectationDocument33 pagesConditional ExpectationOsama HassanNo ratings yet
- Methods For Applied Macroeconomics Research - ch1Document28 pagesMethods For Applied Macroeconomics Research - ch1endi75No ratings yet
- Levy ProcessesDocument22 pagesLevy ProcessesMarouane IzmarNo ratings yet
- RPdefinitionsDocument2 pagesRPdefinitionsdajedi43017No ratings yet
- Linear Stationary ModelsDocument16 pagesLinear Stationary ModelsKaled AbodeNo ratings yet
- 3Document11 pages3oldoce66No ratings yet
- econometrics II CH-3 PPT-1 (1)Document35 pageseconometrics II CH-3 PPT-1 (1)yaboman0989No ratings yet
- EC1252 Signals & Systems General Overview (Courtesy REC)Document74 pagesEC1252 Signals & Systems General Overview (Courtesy REC)jeyaganesh100% (1)
- Time Series-Ch02Document16 pagesTime Series-Ch02Abdul Rehman AzmatNo ratings yet
- Formula Notes Signals and SystemsDocument23 pagesFormula Notes Signals and SystemsimmadiuttejNo ratings yet
- Digital Signal Processing Important Two Mark Questions With AnswersDocument15 pagesDigital Signal Processing Important Two Mark Questions With AnswerssaiNo ratings yet
- SSRN Id1404905Document20 pagesSSRN Id1404905LeilaNo ratings yet
- Course 09-2 - Discrete Time Random SignalsDocument40 pagesCourse 09-2 - Discrete Time Random SignalschilledkarthikNo ratings yet
- ContinuumMechanicsV1 7Document89 pagesContinuumMechanicsV1 7Umair IsmailNo ratings yet
- 4 Time SeriesDocument31 pages4 Time SeriesJ.i. LopezNo ratings yet
- ARIMA AR MA ARMA ModelsDocument46 pagesARIMA AR MA ARMA ModelsOisín Ó CionaoithNo ratings yet
- Arch ModelsDocument13 pagesArch Modelsgarym28No ratings yet
- I. Introduction To Time Series Analysis: X X ... X X XDocument56 pagesI. Introduction To Time Series Analysis: X X ... X X XCollins MuseraNo ratings yet
- Notes PDFDocument59 pagesNotes PDFnajera_No ratings yet
- Chapter 2 - Lecture SlidesDocument74 pagesChapter 2 - Lecture SlidesJoel Tan Yi JieNo ratings yet
- Signal BasicsDocument73 pagesSignal BasicsNabeelNo ratings yet
- A Review of Fundamentals of Lyapunov TheoryDocument8 pagesA Review of Fundamentals of Lyapunov TheoryNanthanNo ratings yet
- Random Processes:temporal CharacteristicsDocument7 pagesRandom Processes:temporal CharacteristicsRamakrishnaVakulabharanam0% (1)
- Lévy Processes and Their CharacteristicsDocument23 pagesLévy Processes and Their CharacteristicskensaiiNo ratings yet
- EC6303 UwDocument73 pagesEC6303 UwsivadhanuNo ratings yet
- Wave Particle DualityDocument9 pagesWave Particle DualitydjfordeNo ratings yet
- Structural VAR and Applications: Jean-Paul RenneDocument55 pagesStructural VAR and Applications: Jean-Paul RennerunawayyyNo ratings yet
- Chapter 2 - AutocorrelationDocument16 pagesChapter 2 - AutocorrelationJoseph William MangaNo ratings yet
- Student Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionFrom EverandStudent Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionRating: 4.5 out of 5 stars4.5/5 (2)
- Student's Solutions Manual and Supplementary Materials for Econometric Analysis of Cross Section and Panel Data, second editionFrom EverandStudent's Solutions Manual and Supplementary Materials for Econometric Analysis of Cross Section and Panel Data, second editionNo ratings yet
- FXCM Activetrader: User Guide To The Activetrader PlatformDocument51 pagesFXCM Activetrader: User Guide To The Activetrader Platformkaddour7108No ratings yet
- High Frequency FX Trading:: Technology, Techniques and DataDocument4 pagesHigh Frequency FX Trading:: Technology, Techniques and Datakaddour7108No ratings yet
- A Seasonal Trade in Gasoline Futures PDFDocument2 pagesA Seasonal Trade in Gasoline Futures PDFkaddour7108No ratings yet
- 040 Nancy MinshewDocument6 pages040 Nancy Minshewkaddour7108No ratings yet
- Echorouk 02 Apr 09 PDFDocument30 pagesEchorouk 02 Apr 09 PDFkaddour7108No ratings yet
- GEA Quick Reference GuideDocument2 pagesGEA Quick Reference Guidekaddour7108No ratings yet
- AC Notes2013 PDFDocument13 pagesAC Notes2013 PDFkaddour7108No ratings yet
- Estimating A VAR - GretlDocument9 pagesEstimating A VAR - Gretlkaddour7108No ratings yet
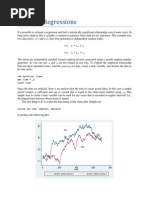
- Spurious Regressions: RW y y V RW X X VDocument3 pagesSpurious Regressions: RW y y V RW X X Vkaddour7108No ratings yet
- Introduction To Algorithmic Trading Strategies: Pairs Trading by CointegrationDocument42 pagesIntroduction To Algorithmic Trading Strategies: Pairs Trading by Cointegrationkaddour7108No ratings yet
- 10 Reasons State Lotteries RuinDocument3 pages10 Reasons State Lotteries Ruinkaddour7108No ratings yet
- A Whale in The Waters of Negative YieldsDocument2 pagesA Whale in The Waters of Negative Yieldskaddour7108No ratings yet
- Biginille Reaction Mechanism PDFDocument4 pagesBiginille Reaction Mechanism PDFshenn0No ratings yet
- Comparing Methods For Calculating Z FactorDocument5 pagesComparing Methods For Calculating Z FactorplplqoNo ratings yet
- 06 Clicker Questions PhysicsDocument20 pages06 Clicker Questions PhysicsVerenice Fuentes100% (1)
- Solutions Assignment 2 f16Document3 pagesSolutions Assignment 2 f16Abdelbassit Abdessamed SenhadjiNo ratings yet
- 0620 Y16 SM 6 PDFDocument4 pages0620 Y16 SM 6 PDFsookchinNo ratings yet
- 12 Chemistry Impq CH03 Electro Chemistry 02 PDFDocument9 pages12 Chemistry Impq CH03 Electro Chemistry 02 PDFamanNo ratings yet
- Afety Requirements IN ALL Stages OF Construction Etermination OF OadsDocument1 pageAfety Requirements IN ALL Stages OF Construction Etermination OF OadsDEBASISNo ratings yet
- Survey Camp 2067 (Version 1)Document26 pagesSurvey Camp 2067 (Version 1)11520035No ratings yet
- Boussinesq Soil Stress FormulaDocument1 pageBoussinesq Soil Stress FormulaAkhtar BahramNo ratings yet
- FIZ101E 1vDocument23 pagesFIZ101E 1vcenkjNo ratings yet
- Sumerians Book I-VII A.IDocument77 pagesSumerians Book I-VII A.IA.INo ratings yet
- Study of Reflection of New Low-Reflectivity Quay Wall Caisson PDFDocument11 pagesStudy of Reflection of New Low-Reflectivity Quay Wall Caisson PDFdndudcNo ratings yet
- Fluid Phase Equilibria, 1 13 DDocument14 pagesFluid Phase Equilibria, 1 13 DEdys BustamanteNo ratings yet
- Stage 8 Progression Test Math 2024 Paper 2Document14 pagesStage 8 Progression Test Math 2024 Paper 2Le Khanh100% (1)
- Business Mathematics and StatisticsDocument78 pagesBusiness Mathematics and Statisticskcmiyyappan2701No ratings yet
- Corner Peeking AnalysisDocument3 pagesCorner Peeking AnalysisAnonymous 5MO0mkNo ratings yet
- Tutorial. 4 CONTROL DESIGNDocument15 pagesTutorial. 4 CONTROL DESIGNSteve Goke AyeniNo ratings yet
- National Highways Authority of IndiaDocument2 pagesNational Highways Authority of IndiajitendraNo ratings yet
- 00 Catalogue Complete Modify08-2016 LowDocument176 pages00 Catalogue Complete Modify08-2016 Lowivan vidondoNo ratings yet
- Zagreb Indices and Their Polynomials of The Linear ParallelogramDocument4 pagesZagreb Indices and Their Polynomials of The Linear ParallelogrambalamathsNo ratings yet
- Substituent Effects - Organic ChemistryDocument8 pagesSubstituent Effects - Organic ChemistrytracyymendozaNo ratings yet
- Industrial Training Presentation NBCDocument31 pagesIndustrial Training Presentation NBCSuraj Singh Mehta100% (2)
- Theory of Limit DesignDocument157 pagesTheory of Limit DesignXingyu YanNo ratings yet
- Differential EqationsDocument39 pagesDifferential EqationsDeepanshu SehgalNo ratings yet
- Automated Suspension Culture: Cytogenetic Harvesting SystemsDocument2 pagesAutomated Suspension Culture: Cytogenetic Harvesting Systemsmoutasim mohammadNo ratings yet
- Flow MeasurementDocument47 pagesFlow MeasurementAshvani ShuklaNo ratings yet