Matrix Chain Multiplication
Matrix Chain Multiplication
Download as docx, pdf, or txt
You might also like
- Matrix Chain MultiplicationDocument4 pagesMatrix Chain MultiplicationjoycyNo ratings yet
- DAA (Unit 2)Document88 pagesDAA (Unit 2)aanandram221No ratings yet
- Lec3 PDFDocument9 pagesLec3 PDFyacp16761No ratings yet
- SortingDocument57 pagesSortingSanjeeb PradhanNo ratings yet
- Aad 4Document19 pagesAad 4tobymanpurayidathilmathew.b22cs1159No ratings yet
- Solu 3Document28 pagesSolu 3Aswani Kumar100% (2)
- Design Techniques Part 2 64Document15 pagesDesign Techniques Part 2 64SANDEEP SinghNo ratings yet
- Big OhDocument10 pagesBig OhFrancesHsiehNo ratings yet
- ADA QB SolDocument13 pagesADA QB Solankitaarya1207No ratings yet
- U5 (1) (2)Document16 pagesU5 (1) (2)sreenidhiborntoruletheworldNo ratings yet
- 20MCA023 Algorithm AssighnmentDocument13 pages20MCA023 Algorithm AssighnmentPratik KakaniNo ratings yet
- Assignment 1 - GossipDocument3 pagesAssignment 1 - GossipAgustín EstramilNo ratings yet
- Assign5 SolutionDocument4 pagesAssign5 SolutionKiet NguyenNo ratings yet
- 03a1 MIT18 - 409F09 - Scribe21Document8 pages03a1 MIT18 - 409F09 - Scribe21Omar Leon IñiguezNo ratings yet
- A Minimal Algorithm For The Multiple-Choice Knapsack ProblemDocument23 pagesA Minimal Algorithm For The Multiple-Choice Knapsack ProblemsulphuckeriumNo ratings yet
- Daa Kcs503 2021-22 Aktu Qpaper SolDocument40 pagesDaa Kcs503 2021-22 Aktu Qpaper SolMRIGYA SAHAINo ratings yet
- Practice Sheet Divide and ConquerDocument5 pagesPractice Sheet Divide and ConquerApoorva GuptaNo ratings yet
- Design & Analysis of Algorithms: Bits, Pilani - K. K. Birla Goa CampusDocument27 pagesDesign & Analysis of Algorithms: Bits, Pilani - K. K. Birla Goa CampusSohan MisraNo ratings yet
- Math 243M, Numerical Linear Algebra Lecture NotesDocument71 pagesMath 243M, Numerical Linear Algebra Lecture NotesRonaldNo ratings yet
- Blaeser Algorithms and Data StructuresDocument109 pagesBlaeser Algorithms and Data StructuresMaia OsadzeNo ratings yet
- MidsemDocument6 pagesMidsemAravind SomasundaramNo ratings yet
- DynprogDocument18 pagesDynprogHykinel Bon GuarteNo ratings yet
- Unit 5Document16 pagesUnit 5Nimmati Satheesh KannanNo ratings yet
- What Are Stacks and QueuesDocument13 pagesWhat Are Stacks and QueuesrizawanshaikhNo ratings yet
- Exercises of Design & AnalysisDocument7 pagesExercises of Design & AnalysisAndyTrinh100% (1)
- MAE 200A - Homework Set #1Document2 pagesMAE 200A - Homework Set #1vsauerNo ratings yet
- DAA Unit 5Document14 pagesDAA Unit 5hari karanNo ratings yet
- Final 13Document9 pagesFinal 13نورالدين بوجناحNo ratings yet
- Introduction To Dynamic Programming: 20bits About WritingDocument6 pagesIntroduction To Dynamic Programming: 20bits About WritingAyele MitkuNo ratings yet
- Iterative Matrix ComputationDocument55 pagesIterative Matrix Computationnicomh2No ratings yet
- Lab 1Document11 pagesLab 1RanaAshNo ratings yet
- To Print - Dynprog2Document46 pagesTo Print - Dynprog2sourish.js2021No ratings yet
- Notes On Dynamic Programming Algorithms & Data Structures: DR Mary CryanDocument12 pagesNotes On Dynamic Programming Algorithms & Data Structures: DR Mary Cryanapi-264609281No ratings yet
- Module-2:Divide and ConquerDocument26 pagesModule-2:Divide and ConquerSk ShettyNo ratings yet
- Multiplym 2Document23 pagesMultiplym 2adyant.gupta2022No ratings yet
- Defcon 18 Schearer ShodanDocument27 pagesDefcon 18 Schearer ShodanYvanNo ratings yet
- Module 2 Daa FINAL 20201Document29 pagesModule 2 Daa FINAL 20201trichy_sathishNo ratings yet
- NP-hard Problems and Approximation Algorithms: 10.1 What Is The Class NP?Document29 pagesNP-hard Problems and Approximation Algorithms: 10.1 What Is The Class NP?Aleksandr TerranovaNo ratings yet
- BCS401 ADA m2 NotesDocument28 pagesBCS401 ADA m2 Notessantoshpatilrao33No ratings yet
- Conjugate Gradient MethodDocument8 pagesConjugate Gradient MethodDavid HumeNo ratings yet
- NA FinalExam Summer15 PDFDocument8 pagesNA FinalExam Summer15 PDFAnonymous jITO0qQHNo ratings yet
- Divide and ConquerDocument20 pagesDivide and ConquerVinay MishraNo ratings yet
- Notes On Divide-and-Conquer and Dynamic Programming.: 1 N 1 n/2 n/2 +1 NDocument11 pagesNotes On Divide-and-Conquer and Dynamic Programming.: 1 N 1 n/2 n/2 +1 NMrunal RuikarNo ratings yet
- Mcs 031 qns2 Image: Travelling Salesman Problem Previous PostDocument5 pagesMcs 031 qns2 Image: Travelling Salesman Problem Previous PostUmesh sharmaNo ratings yet
- Exercises of Design & AnalysisDocument6 pagesExercises of Design & AnalysisKhang NguyễnNo ratings yet
- Daa Unit Vi NotesDocument15 pagesDaa Unit Vi NotesPoorvaNo ratings yet
- ps2Document3 pagesps2sunshiyao0No ratings yet
- Lec12.1-Dynamic Programming 2Document32 pagesLec12.1-Dynamic Programming 2marah qadiNo ratings yet
- MIR2012 Lec1Document37 pagesMIR2012 Lec1yeesuenNo ratings yet
- Linear System: 2011 Intro. To Computation Mathematics LAB SessionDocument7 pagesLinear System: 2011 Intro. To Computation Mathematics LAB Session陳仁豪No ratings yet
- Bosco en El Articulo MatematicoDocument10 pagesBosco en El Articulo MatematicoartovolastiNo ratings yet
- Final Exam: 1. Lots of Ones (20 Points)Document4 pagesFinal Exam: 1. Lots of Ones (20 Points)FidaHussainNo ratings yet
- Tut2 QuestionsDocument3 pagesTut2 QuestionsAmir SharifiNo ratings yet
- To Read Dynprog2Document50 pagesTo Read Dynprog2sourish.js2021No ratings yet
- hw09 Solution PDFDocument8 pageshw09 Solution PDFsiddharth1kNo ratings yet
- PresDocument18 pagesPresEr Umesh ThoriyaNo ratings yet
- Divide and Conquer: Analysis of AlgorithmsDocument11 pagesDivide and Conquer: Analysis of Algorithmsgashaw asmamawNo ratings yet
- Daaunit IVDocument17 pagesDaaunit IVHarika KopparthiNo ratings yet
- MCQ XMLDocument5 pagesMCQ XMLamukhopadhyayNo ratings yet
- 2nd ClassDocument7 pages2nd ClassamukhopadhyayNo ratings yet
- String MatchingDocument12 pagesString MatchingamukhopadhyayNo ratings yet
- StrassenDocument8 pagesStrassenamukhopadhyayNo ratings yet
- Graph Traversal Algorithm: RecapitulationDocument14 pagesGraph Traversal Algorithm: RecapitulationamukhopadhyayNo ratings yet
- Recurrence TreeDocument6 pagesRecurrence TreeamukhopadhyayNo ratings yet
- Networking BasicsDocument14 pagesNetworking BasicsamukhopadhyayNo ratings yet
- ARQDocument6 pagesARQamukhopadhyayNo ratings yet
- Substitution MethodDocument6 pagesSubstitution MethodamukhopadhyayNo ratings yet
- Myhill NerodeDocument10 pagesMyhill NerodeamukhopadhyayNo ratings yet
- AutoDocument7 pagesAutoamukhopadhyayNo ratings yet
- Transport Layer Notes Module 3Document10 pagesTransport Layer Notes Module 3amukhopadhyayNo ratings yet
- Calibration Problem Minimum No of Control PointsDocument1 pageCalibration Problem Minimum No of Control PointsamukhopadhyayNo ratings yet
- Disjoint SetDocument4 pagesDisjoint SetamukhopadhyayNo ratings yet
- Pumping Lemma Note - Get - EasyDocument3 pagesPumping Lemma Note - Get - EasyamukhopadhyayNo ratings yet
- Phase 1: Requirement Analysis and Specification. The Main Task of This Phase Is ToDocument19 pagesPhase 1: Requirement Analysis and Specification. The Main Task of This Phase Is ToamukhopadhyayNo ratings yet
- Advanced C Concepts: 2501ICT NathanDocument32 pagesAdvanced C Concepts: 2501ICT NathanamukhopadhyayNo ratings yet
- 4 Reg ExDocument26 pages4 Reg ExasinawahabNo ratings yet
- Choto DidiDocument1 pageChoto DidiamukhopadhyayNo ratings yet
- 3 PipelineDocument21 pages3 PipelineamukhopadhyayNo ratings yet
- Exercise 13 & 16 Creative Question: General MathematicsDocument2 pagesExercise 13 & 16 Creative Question: General MathematicsArnabNo ratings yet
- All Problems and AnswersDocument31 pagesAll Problems and AnswerstarhuniNo ratings yet
- DLL - Mathematics 6 - Q3 - W6Document7 pagesDLL - Mathematics 6 - Q3 - W6Treshiel JohnwesleyNo ratings yet
- New Green Field School Alaknanda: Syllabus Class XI - Science Session 2024-25Document11 pagesNew Green Field School Alaknanda: Syllabus Class XI - Science Session 2024-25Anamika JaswalNo ratings yet
- Second Semester 2019-2020Document2 pagesSecond Semester 2019-2020Abhigyan ShekharNo ratings yet
- Unit 5.2 Multiple Choice Practice Parallel and PerpendicularDocument4 pagesUnit 5.2 Multiple Choice Practice Parallel and PerpendicularmahatharwatNo ratings yet
- SamplePaper-XII-Microsoft Word - MCQ 12 Main Maths-133478021686146922Document6 pagesSamplePaper-XII-Microsoft Word - MCQ 12 Main Maths-133478021686146922devblogger40No ratings yet
- Fairing Methods of Planar and Space Curves Under Design Constraints - Applications in Computer-Aided Ship DesignDocument124 pagesFairing Methods of Planar and Space Curves Under Design Constraints - Applications in Computer-Aided Ship DesignKostis PigounakisNo ratings yet
- m2l6 PDFDocument6 pagesm2l6 PDFsrinadh1602No ratings yet
- Numerical Solutions in Heat TransferDocument14 pagesNumerical Solutions in Heat Transferaranna lalNo ratings yet
- Mathematics Paper 3 Sets Relations and Groups HL MarkschemeDocument10 pagesMathematics Paper 3 Sets Relations and Groups HL MarkschemeNeelamNo ratings yet
- Enggmath 2 Midterm ExamDocument2 pagesEnggmath 2 Midterm ExamAyaNo ratings yet
- Algebra Questions For CATDocument12 pagesAlgebra Questions For CATAnsh LohiaNo ratings yet
- Spline InterpolationDocument8 pagesSpline Interpolationrod8silvaNo ratings yet
- A Note On Riemann Normal Coordinates.Document6 pagesA Note On Riemann Normal Coordinates.hammoudeh13No ratings yet
- S&NMDocument2 pagesS&NMManoji PNo ratings yet
- Differential Equation - Examples of Exact EquationsDocument4 pagesDifferential Equation - Examples of Exact EquationsAimi Najwa Zailan50% (2)
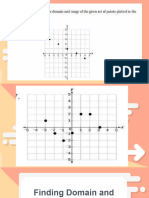
- Finding Domain and Range of A Function G8 1Document13 pagesFinding Domain and Range of A Function G8 1kennethvilla07No ratings yet
- Rational NumbersDocument5 pagesRational NumbersMichael Lumogda Dela PeñaNo ratings yet
- Lecture 15 - The Lie Group SL (2, C) and Its Lie Algebra SL (2, C) (Schuller's Geometric Anatomy of Theoretical Physics)Document10 pagesLecture 15 - The Lie Group SL (2, C) and Its Lie Algebra SL (2, C) (Schuller's Geometric Anatomy of Theoretical Physics)Simon ReaNo ratings yet
- Permutation GroupsDocument12 pagesPermutation GroupsHimanshu AhujaNo ratings yet
- 2D and 3D TransformationDocument42 pages2D and 3D Transformationachintya0105No ratings yet
- PH36010 Numerical Methods: Solving Differential Equations Using MATHCADDocument32 pagesPH36010 Numerical Methods: Solving Differential Equations Using MATHCADbashasvuceNo ratings yet
- 11-Tangents To CirclesDocument4 pages11-Tangents To CirclesCorbette AlvaroNo ratings yet
- JACOBIANDocument14 pagesJACOBIANŞįśirŚärķeŕNo ratings yet
- Classical Mechanics NotesDocument54 pagesClassical Mechanics NotesAmichai LevyNo ratings yet
- Math 201 Lecture 12: Cauchy-Euler EquationsDocument8 pagesMath 201 Lecture 12: Cauchy-Euler EquationsPlease ScribdNo ratings yet
- Mat112n2017 PDFDocument4 pagesMat112n2017 PDFThemba MdlaloseNo ratings yet
- Primary Decomposition in Boolean Rings: X X X X X X X yDocument11 pagesPrimary Decomposition in Boolean Rings: X X X X X X X yrizkyNo ratings yet
- 2015 1 Ked Mahsuri (Q)Document3 pages2015 1 Ked Mahsuri (Q)Misteri JongNo ratings yet