0 ratings0% found this document useful (0 votes)
53 viewsOn Routing Schemes For Switch-Based In-Vehicle Networks: Shuhui Yang, Wei Li, and Wei Zhao
On Routing Schemes For Switch-Based In-Vehicle Networks: Shuhui Yang, Wei Li, and Wei Zhao
Uploaded by
Alex ParampampamThis document discusses routing schemes for switch-based in-vehicle networks. It proposes a switch-based network architecture where sub-networks are connected by switches to form a backbone. It analyzes routing schemes for their performance in meeting criteria like delivery guarantee, loop-free routing and real-time constraints. It shows that existing systems can easily satisfy the conditions for effective routing schemes in this new network architecture.
Copyright:
© All Rights Reserved
Available Formats
Download as PDF, TXT or read online from Scribd
On Routing Schemes For Switch-Based In-Vehicle Networks: Shuhui Yang, Wei Li, and Wei Zhao
On Routing Schemes For Switch-Based In-Vehicle Networks: Shuhui Yang, Wei Li, and Wei Zhao
Uploaded by
Alex Parampampam0 ratings0% found this document useful (0 votes)
53 views15 pagesThis document discusses routing schemes for switch-based in-vehicle networks. It proposes a switch-based network architecture where sub-networks are connected by switches to form a backbone. It analyzes routing schemes for their performance in meeting criteria like delivery guarantee, loop-free routing and real-time constraints. It shows that existing systems can easily satisfy the conditions for effective routing schemes in this new network architecture.
Original Title
08-12
Copyright
© © All Rights Reserved
Available Formats
PDF, TXT or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
This document discusses routing schemes for switch-based in-vehicle networks. It proposes a switch-based network architecture where sub-networks are connected by switches to form a backbone. It analyzes routing schemes for their performance in meeting criteria like delivery guarantee, loop-free routing and real-time constraints. It shows that existing systems can easily satisfy the conditions for effective routing schemes in this new network architecture.
Copyright:
© All Rights Reserved
Available Formats
Download as PDF, TXT or read online from Scribd
Download as pdf or txt
0 ratings0% found this document useful (0 votes)
53 views15 pagesOn Routing Schemes For Switch-Based In-Vehicle Networks: Shuhui Yang, Wei Li, and Wei Zhao
On Routing Schemes For Switch-Based In-Vehicle Networks: Shuhui Yang, Wei Li, and Wei Zhao
Uploaded by
Alex ParampampamThis document discusses routing schemes for switch-based in-vehicle networks. It proposes a switch-based network architecture where sub-networks are connected by switches to form a backbone. It analyzes routing schemes for their performance in meeting criteria like delivery guarantee, loop-free routing and real-time constraints. It shows that existing systems can easily satisfy the conditions for effective routing schemes in this new network architecture.
Copyright:
© All Rights Reserved
Available Formats
Download as PDF, TXT or read online from Scribd
Download as pdf or txt
You are on page 1of 15
1
On Routing Schemes for Switch-Based In-Vehicle
Networks
Shuhui Yang, Wei Li, and Wei Zhao
Department of Computer Science
Rensselaer Polytechnic Institute
Troy, NY 12180
Emails: {yangs6, liw7, zhaow3}@rpi.edu
Abstract In this paper, we study in-vehicle digital
communication networks. We propose switch-based network
architecture and analyze routing schemes in terms of their
performance in this new kind of in-vehicle network. We are able
to derive conditions under which a network with a proper
routing scheme can meet criteria of delivery guarantee, loop-less
routing, link-capability limitation, and real-time constraints. We
show that these conditions can be easily satisfied in existing
systems. Hence, network solutions we discover can be readily
utilized in a wide range of practical automotive systems.
Keywords bus network, in-vehicle network, routing scheme,
switch network.
I. INTRODUCTION
In this paper, we address issues related to in-vehicle digital
network systems. A vehicle is inherently a distributed
information system, as the operation of a vehicle depends on
the collaborative operations of functional components in
different locations [Cho95] [KWMH96] [Kop99] [LH02a].
Before the era of automotive electronic systems,
communication in the system was performed by mechanical or
hydraulic means. A modern vehicle consists of mechanical
systems, (i.e., engines, drive train, and steering), hardware,
(i.e., electronic control units, sensors and actuators, and vehicle
networks), and software, (i.e., embedded operating systems,
middleware, and applications). Digital networking technology
has been exploited for in-vehicle communication due to its
cost-efficiency, space efficiency, and flexibility [AFH03]
[CKMNP07] [CVV05] [Koo02] [LHD99] [NHB05]
[NSSW05]. A variety of functions, including lights, wipers,
doors/windows, and motor control, have realized digitized
control. Network protocols have been developed accordingly,
such as LIN [ABD99], CAN [Bos91], TTP/C [TTP99],
FlexRay [BE01], and MOST [MOST02]. Our goal is to
develop and analyze network architectures and related
protocols to support scalable, flexible, and real-time
communications in automotive systems.
The control-by-wire feature [WNSS04] [Tre02] is being
realized in the design of the next generation vehicle
thoroughly, for not only general functionalities (e.g. light-by-
wire), but also for mission critical ones (e.g. break-by-wire,
engine-by-wire). An integrated x-by-wire system [WNSS04]
is expected to take charge of the communication in the vehicle
in a real-time, reliable, fault-tolerant, and scalable manner. The
rapid development of vehicle capabilities introduces new
challenges and demands for automotive network systems
[CVV05] [KHM04] [LHD99] [NHB05] [NSSW05]. For
example, the amount of transmitted information will increase
significantly with more electronic and digital components
deployed in automotive systems (e.g., use of audio and video).
In addition, applications such as Collision Warning and/or
Avoidance and Intelligent Transportation Systems (ITS)
[MM99] also require the support of novel network [HA04]
[KHM03] [Koo02].
Protocols used for current in-vehicle digital systems (e.g.,
CAN), are mostly based on bus-based networks. The event-
triggered mechanism [Alb04] [ASV04] [BB03] [Kop01] is
used in protocols such as CAN to provide priority-driven
communications. The time-triggered mechanism [AFF99]
[Alb04] [Ban99] [FMAPN00] [GN05] [KG94] [KHE00]
[Kop01] [LH02b] [OPK05] is also widely used, in which a
system-wide time-base is established in order to transmit
messages in a synchronous manner. The bus-based network
architecture lacks scalability when more electrical components
are added to the system. Real-time gateways [Dod01] [TY03]
are designed to solve the problem by constructing a
heterogeneous in-vehicle network to make the system scale
easily, as well as to integrate different protocols. However, the
single-node gateway has the inherent drawback of the
capability bottleneck that may harm the system performance.
The major contributions of this paper are as follows: First,
we propose novel switch-based network architecture. Note that
the concept of switch-based networks is adopted for the
purpose of flexible and scalable communication. In our system,
a network is partitioned into sub-networks. Each of these can
be a bus-based network, as in current in-vehicle systems. These
bus-based sub-networks are then connected by a backbone that
consists of a number of switches. The several unique
characteristics of our switch-based network architecture
distinguish it from other proposals: Taking advantage of a
switch-based backbone, our network can be easily scaled up in
terms of bandwidth capabilities and may eliminate a single
point of failure if properly configured. As we connect bus-
based sub-networks to the backbone, the system is still
compatible with existing vehicle control units that usually
connect to bus-based networks. The cost of the network can be
kept low as the switches in the system require very low
hardware complexity.
Then, based on this architecture, we focus our study on
message routing schemes that are particularly suitable for these
new in-vehicle network systems. While routing schemes have
been extensively studied for switch-based networks, we have
new challenges here. The messages of in-vehicle networks are
usually not addressed by their source and destination addresses,
rather by functional types. Each type of messages may have
multiple senders and multiple receivers. We evaluate routing
schemes in terms of their efficiency and effectiveness for this
2
Figure 1. Switch-based Network Architecture
type of many-to-many cast messages. We are able to derive
conditions under which a network with a proper routing
scheme can meet criteria of delivery guarantee, loop-less
routing, link-capability limitation, and real-time constraints.
We show that these conditions can be easily met in the in-
vehicle system design. Hence, the solutions we discover can be
readily utilized in real automotive systems.
The remainder of the paper is organized as follows: Section
II discusses related work; Section III presents the architecture
of the proposed system, the design of the switch, and the
network model. Section IV provides detailed results on
evaluation of routing schemes. Section V summarizes the paper
with a discussion of future work.
II. RELATED WORK
A number of digital in-vehicle network systems such as
CAN, LIN, FlexRay and TTP/C have been developed. They all
adopt a bus-based architecture but are different in terms of
functions, performance and application scope. These networks
can be classified into two categories, the event-triggered and
the time-triggered networks. CAN and TTP/C are the
representatives for each category, respectively. The event-
triggered architecture (such as CAN) is designed for
asynchronous communications. In CAN, each frame has an
identifier standing for its priority. It also uses the method of
binary countdown to select the frame with the highest priority
for transmission. On the other hand, time-triggered architecture
(such as TTP/C, FlexRay) is designed to support synchronous
communications. For example, TTP/C is designed to support
real-time communications by adopting Time Division Multiple
Access (TDMA) scheme. In TDMA scheme, each node has
been allocated a fixed time period to utilize the network
resources in a round-robin, instead of preemptive manner in
event-triggered networks. [Alb04] compares these two types of
architecture and details their advantages and drawbacks.
As automotive systems evolve with increasing capabilities,
more electronic components are integrated into vehicle
electronic systems. This brings remarkable increasing demand
on communications in terms of bandwidth, real time, and
reliability. Existing in-vehicle networks become the bottleneck
of bandwidth and performance due to their bus-based
architecture. Work has been done to upgrade the bus-based
network architecture. The basic idea has been to partition a
network into sub-networks (each of them is still a bus for the
sake of compatibility) and then to interconnect the sub-
networks. Two types of approaches have been proposed for the
interconnection. We briefly discuss them below.
The first is to use a backbone network for interconnection,
called the backbone approach. That is, the backbone network
interconnects all functional sub-networks. Information
exchanged among different sub networks is performed by this
network as well as message format conversion. In [RSG05],
IEEE 1394 networks are used as backbones to link all other
networks such as CAN and TTP/C. In [HPZ07] [SJ W08], a
FlexRay network is used as a backbone network to
interconnect several sub systems, which are networked by
MOST, CAN and FlexRay as well. [SBF05] uses a bus
Ethernet to interconnect several CAN bus.
The second one is called gateway approach. In [Dod01]
[TY03], it uses a dedicated computer node to interconnect sub-
networks. The role of the gateway computer is to transmit
messages from one sub-network to another and perform
message format conversion, if necessary. The gateways can be
implemented at a different layer of OSI model. At the DLL and
MAC layer, a gateway is then called a bridge. In [EKP96] and
[EKP97] design and performance of CAN-to-CAN bridges
have been discussed. In [AST03], [CSS00], [KB02], [MSK07],
[PEP04], [PEP05], [PF00], [SB07], [SBF06], [SHL06], and
[SLH06], different types of gateways which interconnect
different in-vehicle network protocols have been introduced.
The gateway approach is efficient when the number of sub-
networks in the system is small. However, it is prone to single
point failure and may become a performance bottleneck, and
hence suffers scalability. The backbone approach overcomes
these problems but needs to be properly configured in order to
provide required communication services. We adopt this
approach and address how to develop effective routing
schemes.
III. SWITCH-BASED NETWORK ARCHITECTURE
In this section, we introduce a switch-based architecture for
in-vehicle networks. We present the motivation, discuss its
characteristics, and consider the routing problem.
A. Proposed Network Architecture
As mentioned in the previous section, existing in-vehicle
network systems are diverse and correspond to different
protocols. However, they typically share a common
characteristic, i.e., bus-based topology. Most of existing
networks adopt bus topology, implying a broadcast mode for
message transmission.
In a bus-based in-vehicle network, nodes are usually called
Electronic Control Units (ECUs). An ECU is composed of
both hardware and software. Usually, ECUs are directly
connected to sensors and/or actuators. According to their
different functions, ECUs send or receive different types of
messages. In early generations of in-vehicle networks, only
ECUs on the same bus communicate to each other.
However, with increasing demand for onboard automotive
electronic systems, sub-systems may adopt different in-vehicle
networks and information needs to be exchanged among them.
How to connect sub-networks is a critical issue on which we
will focus in this paper.
Figure 1 shows the architecture of our proposed network. In
Figure 1, there are a number of sub-networks. They may be
3
Figure 2. Workflow of a Switch
Figure 3. Conceptual Design of a Switch
CAN, FlexRay, TTP/C or other bus-based sub-networks. Each
sub-network may contain one or more ECUs (not shown in
Figure 1). Sub-networks are then connected by a switch-based
backbone. This backbone relays messages among these sub-
networks and performs format conversion if necessary.
In comparison with other approaches that we discussed in
Section II, this network architecture has the following
advantages:
1) Scalability and adaptability: Switch-based networks
can be easily adjusted to meet the increased demands and to
adapt to different situations. This is a clear advantage over the
gateway approach.
2) Reliability: Redundancy can be easily introduced into
our network in order to eliminate the single point of failure,
hence increasing reliability. In [RSG05], [HPZ07], [SJ W08],
and [SBF05], a bus is used as a backbone which limits
flexibility of topology and hence is difficult to introduce
redundancy.
3) Low cost: With proper design, both manufacturing and
maintenance costs can be kept at a minimum. We will discuss
this issue further in the latter portion of this paper.
B. Design of Switch
Figure 2 presents the main workflow of a switch, which
includes message receiving and buffering, routing table look-
up, protocol/format conversion
1
, and message relay. Based on
this workflow model, Figure 3 provides a conceptual design of
a switch. A switch consists of the following major components:
1) Computing resources. Computing resources include
basic hardware such as processors, memories, storage, etc.
These resources must meet the constraints on cost, reliability,
and real time.
2) Network Interface Controllers. For different sub-
networks, the switches need to use different types of network
interface controllers such as CAN controller or FlexRay
controllers. The ports of a switch are interfaces to sub-
networks or other switches. Messages are received from some
ports and are relayed to others. Usually, a port contains two
message buffers, i.e. a memory space of the FIFO for
incoming and outgoing messages.
3) Routing table. Different from the routing tables in
Internet routers, we will consider routing schemes that use
static routing tables, which means that routing information
will not be changed at runtime and is stored in solid memories,
such as EPROM. Section IV will provide detailed discussion
on this subject.
1
An alternative approach is to implement protocol/format conversion at
ECUs. For example, in [DF06], [Bev01], [OPK05], [O07], [KBM04], and
[DBK03], middleware is used to convert all messages into a standard format
via application programming interface (API) for all ECUs. Each approach has
its own advantages and problems. Where to implement conversion is not
relevant to the results of this paper and hence we will not discuss this issue
further.
C. Challenges of Routing Schemes
As in any switch-based network, routing scheme is critical
for system efficiency and effectiveness. For efficiency, we
mean that a routing scheme should be simple and that it uses
the minimum amount of computing and communication
resources. For effectiveness, we require that messages be
correctly routed to their destinations, meet their deadlines, and
avoid endless loops.
A particular challenge in routing messages in our in-vehicle
network is in the addressing mode of messages. Messages
within in-vehicle networks are not uni-cast, any-cast, or multi-
cast, but are, in fact, many-to-many cast. That is, messages are
grouped into types. For a type of message, there are typically
multiple senders and multiple receivers [TB94]. A message
from any sender of a given type must be delivered to all the
receivers designated by this type.
For these kinds of many-to-many cast messages, routing
schemes utilized in the traditional Internet may not be
adoptable to in-vehicle networks due to (the lack of) efficiency,
effectiveness, or both.
It is the objective of this paper to explore routing schemes
that are suitable for our newly proposed switch-based in-
vehicle networks. Section IV will report details of our
investigation results.
IV. ANALYSIS OF ROUTING SCHEMES
A. Overview
In a network, it is its routing scheme to generate routing
tables that decide how a message is transmitted from its sender
to its receiver. In a switch-based network, routing is usually
realized by routing tables embedded in switches. That is, each
switch has a routing table. A routing table has a number of
entries. Each entry identifies a message and an output port.
Once the message arrives with that particular identification, the
message is delivered to the output port indicated in the entry
for transmission.
4
Group ID Output Ports
Type 1 1, 3
Type 2 2, 3
Type m 1, 2
(a) Case 1
Group ID
Message Type Input Port
Output
Ports
Type 1 1 3
Type 1 2 3, 4
Type 1 3 2, 4
Type 2 1 2
Type 2 2 3, 4
Type 2 3 1, 2, 4
...
Type m 1 2
Type m 2 1, 3
Type m 3 2, 4
(b) Case 2
Group ID
Message Type Input Port Sender
Output
Ports
Type 1 1 15 3, 4
Type 1 1 19 2
Type 1 2 11 1,3
Type 1 2 23 4
Type 1 2 24 3, 4
Type 1 3 12 1, 2
Type 1 3 18 1, 4
.
Type m 1 17 2, 4
Type m 1 24 2, 3
Type m 1 35 3
Type m 2 12 3
Type m 2 32 2
Type m 3 19 2, 3
(c) Case 3
Figure 5. Routing Tables with Different Group Identifiers
Group ID Output Ports
a 1, 4
b 2
z 2, 3
Figure 4. General Form of Routing Table
As networks become more complicated, entries of a routing
table carry more semantics. An entry does not only have to
identify an individual message, rather a group of messages. For
example, messages may be grouped by a particular destination
address and/or a particular sender address. In our case,
naturally, messages may be grouped by their types.
Furthermore, a message may not have to just be transmitted to
one output port. For example, in the case of multi-cast, a
message may need to be transmitted over a group of output
ports. The same is true for many-to-many cast messages in our
in-vehicle networks. Figure 4 shows a general form of routing
table.
Depending on when routing table entries are generated, we
can classify routing strategies as follows:
Dynamic generation of routing table entries. That is,
the routing table entries are generated in an on-demand
fashion at run time. A switch usually caches a number
of routing table entries. When a message arrives at the
switch, if its entry does not exist, the switch invokes a
routing algorithm to dynamically generate the entry.
Obviously, this strategy works well for situations in
which the network is large and may be dynamically
changing. However, this approach requires that
switches have powerful computation and
communication capacity to coordinate with each other
and generate routing table entries in real time.
Static generation of routing table entries. That is, the
entries are generated off line and uploaded to the
switch at the time when the network is installed. This
approach has the advantage of no longer requiring any
computation and communication capability for run-
time entry generation. It works well in the situations
when the complete knowledge of messages is available
before network installation. Fortunately, this is the case
for our in-vehicle networks. Hence, we adopt this
approach in our study.
Now, let us consider group identifiers used in routing table
entries. Obviously, if group identifiers contain more
information, better decisions can be made on how to route the
messages. Hence the system becomes more effective. On the
other hand, as more information is contained in the identifiers,
the space overhead of the switch will be increased. Thus, the
design issue here is to discover routing schemes that can be
effective with the minimum amount of information in group
identifiers. From this point of view, we will consider three
cases of routing table structure:
Case 1. In our system, the simplest way to define group
identifier is to use message type. That is, each type of
messages has an entry in the routing table in a switch.
Figure 5 (a) shows this kind of routing table. The
length of the table is m where m, is the number of
message types.
Case 2. A better way to define the group identifier of a
message is to use both message type and input port ID.
Note that our messages are many-to-many cast. Hence,
messages of the same type may come to a switch from
different input ports. Figure 5 (b) shows this kind of
routing table. Thus, the length of a routing table is now
in the order of O(mn), where n is the number of input
ports a switch may have. We note that n is usually
between 4 and 8. Hence, the increase of the length is
not too significant.
Case 3. A more complicated method is to define group
identifiers by message type, input port ID, and senders
ID. Figure 5 (c) shows this kind of routing table. The
length of a routing table is now in the order of O(nmk),
5
10
20
30
40
50
60
70
80
90
0 10 20 30 40 50 60
S
u
c
c
e
s
s
R
a
t
e
Number of Nodes in Receiver Set
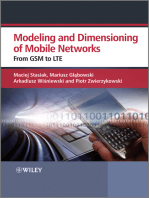
Figure 6. Performance of the Shortest Path Protocol
where k is the total ECUs in the system. Thus, the table
length here is typically at least one or two orders
bigger than that of Cases 1 and 2. Thus, the length
increase is very significant.
Our goal in this paper is not to promote a particular routing
strategy, rather to evaluate (in terms of efficiency and
effectiveness) different routing schemes that use different
amounts of information in the routing table. We hope that the
results of our investigation will provide guidelines for design
and implementation of routing schemes used in practice.
As we are taking a static approach for routing table
generation, we no longer need to worry about the run time
overhead of computation and communication. Thus, the
efficiency of a routing scheme should be measured by its space
complexity of routing table.
In order to be considered effective, a routing scheme must
meet the following four criteria:
Delivery guarantee. The routing scheme must
guarantee that a message is delivered to all its
designated destinations.
Loop-less routing. In-vehicle networks are mission
critical and hence messages should be routed in a way
that would never let them be looped in the network.
Link capacity constraint. Messages transmitted over a
link should be no more than the link capacity allowed.
Real-time constraint. Transmission of messages must
meet their deadlines in order to achieve the mission
objectives.
Much of the work has been done to verify if a given routing
scheme (i.e., routing tables it generated) can meet these criteria
for general switch-based network. In Sections IV.B and IV.C,
we will develop specific verification methodologies for our in-
vehicle networks.
B. Verification of Delivery-Guarantee and Loop-Less
Criteria
In this subsection, we would like to study routing schemes
and analyze under what conditions, they will meet delivery
guarantee and loop-less criteria as outlined in Section IV.A.
First, we introduce a concept of optimal scheme.
Definition 1. An optimal routing scheme in terms of
criterion X (where X can be delivery guarantee, loop less, or
both) is the one that for any network topology and message
specification, if there exists a routing scheme that satisfies
criterion X, the optimal one also satisfies the criterion.
Next, we consider the three cases of routing table structure
discussed in Section IV.A.
Case 1.
Recall that, in this case, the routing table is the simplest and
has the shortest length. Only message types are used to identify
messages in routing. We have the following results.
Theorem 1. Assume that in a network, routing table
structure of Case 1 is adopted. Then, the problem of
determining whether there exist routing tables that meet both
criteria of delivery guarantee and loop less is NP-complete.
Reader is referred to Appendix for a complete proof. From
Theorem 1 and general complexity theory, it is unlikely to
develop an optimal routing scheme that has polynomial time
complexity for this case. Thus, we will no longer investigate
optimal routing schemes for this case. Rather, we will consider
some heuristic schemes.
A common heuristic scheme is the shortest path protocol
(SPP). With SPP, a path with shortest length is chosen to
deliver a message from its source to its destination. SPP is
expected to achieve better performance in terms of message
delay and resource conservation. The pseudo code of the
algorithm is given in Algorithm 1.
Algorithm 1. Shortest Path Protocol (SPP)
1. For each message type i,
2. For each sender node s,
3. For each receiver node r,
4. Find the shortest path from s to r,
5. Fill in the routing table entry on the path
6. End.
Obviously, the shortest path protocol meets the criterion of
delivery guarantee. Figure 6 shows simulation results of the
performance of SPP in terms of meeting the criterion of loop
less. Figure 6 reports the data for randomly generated systems
that have a configuration as shown in Figure 1. In a simulated
system, each subnet contains 10 ECUs. There are 70 types of
messages. For each type, two ECUs are randomly chosen as
senders and x ECUs are randomly chosen as receivers. x varies
from 1 to 70. For each value of x, total 100 systems are
generated. We have also simulated other situations with other
simulation parameters. The results are similar and will not be
reported here due to the space limitation.
We measure the performance by Success Rate, which is
defined as the ratio of the number of generated systems that
meet the loop-less criterion vs. the total number of systems
generated. From Figure 6, we observe that when the number of
receivers increases, the success rate decreases. Especially,
when x, the number of receivers for a type of messages,
exceeds 10, the success rate reduces to between 10% and 30%.
We believe that this kind of performance is unsatisfactory and
would not recommend the shortest path scheme for this case.
6
(a) Network Configuration
Group ID Output Ports
Type 1 1, 3
(b) Routing Table at G1
Group ID Output Ports
Type 1 1, 2
(c) Routing Table at G2
Figure 7. An Example for Case 1
(a) Switch Graph of the System in Figure 1
(b) Another Example of Switch Graph
Figure 8. Switch Graphs
An obvious reason that SPP fails is that SPP is simple and
has no ability to detect and break cycles that may occur due to
the routing tables it generates. Fundamentally, we also believe
that the failure in Case 1 is due to the fact that too little
information is used in routing (i.e., by the group identifiers)
and hence any routing scheme would have difficulty to meet
the loop-less criterion. Consider the following example. It
shows that for a simple network like the one shown in Figure 7,
there does not exist any routing scheme that can meet the loop-
less criterion in Case 1.
Example 1. Figure 7 (a) shows a network with two
switches i.e., G
1
and G
2
. There is one type of messages that has
senders of S
1
and S
2
and receivers of R
1
and R
2
. In order to
route messages from S
1
to R
1
and R
2
, the routing table in G
1
must be in the form shown in Figure 7 (b). Similarly, in order
for messages generated by S
2
to be routed to R
1
and R
2
, the
routing table in G
2
must have a form as shown in Figure 7 (c).
That is, it is necessary to configure the routing tables as shown
in Figures 7 (b) and (c) in order to meet delivery guarantee
criterion.
Now, when a message generated by S
1
arrives at G
1
, it is
routed to R
1
and G
2
. Then, when the message arrives at G
2
, it
will be routed to R
2
and G
1
. Thus, the message will endlessly
loop between G
1
and G
2
, failing to meet the loop-less criterion.
In brief, while systems in Case 1 will have the least space
complexity, it may be difficult to develop good heuristic
routing schemes due to the insufficient information in the
routing table. This motivates us to investigate other cases
where more information is used.
Case 2.
Recall that, in this case, the routing table uses more
information than that of Case 1. Both message types and input
port IDs are used to identify messages in routing. We have the
following results.
Theorem 2. Assume that in a network, routing table
structure of Case 2 is adopted. Then, the problem of
determining whether there exist routing tables that meet both
criteria of delivery guarantee and loop less is NP-complete.
Reader is referred to Appendix for a complete proof. Once
again, from this theorem and general complexity theory, it is
unlikely to develop an optimal routing scheme that has
polynomial time complexity for this case. Thus, we should
consider some heuristic schemes.
Again, the candidate of heuristic scheme is the shortest path
protocol (SPP). Though this scheme meets the delivery
guarantee criterion easily, as analyzed in Case 1, it may not be
able to meet the loop-less criterion due to its simplicity. Our
goal here is to identify certain topological condition under
which SPP can always meet the loop-less criterion. It is our
hope that the topological condition is not too constrained and
can be easily met in practice. We introduce some notations
first.
Definition 2. Switch graph G =(V, E) of an in-vehicle
network system is a graph containing only switch nodes and
links between switches, where V is the set of all nodes and E is
the set of all links.
Figure 8 (a) shows the switch graph of the system in Figure
1. Figure 8 (b) shows another example of switch graph. Note
that the switch graph corresponds to the system backbone.
For any two nodes v
i
and v
j
V, let V
ij
denote the set of
nodes on the shortest path between v
i
and v
j
in the switch graph.
Definition 3. A subgraph G=(V, E) of a switch graph G
is shortest path completed if for any two nodes v
i
and v
j
V,
1) V
ij
V, and
2) if (v
i
,
v
j
) E, (v
i
,
v
j
) E.
Definition 4. A SPP-routing ring of G is a shortest path
completed subgraph of G. The SPP-routing ring has a ring
topology. The number of the nodes on the ring is its ring
length.
In the switch graph shown in Figure 8 (b), the entire switch
graph is a SPP-routing ring with length of 4.
7
In Figure 8 (a), {a, b, d} and edges among them form a
SPP-routing ring with length of 3. Also, {b, d, c} and edges
among them form another SPP-routing ring with length 3.
However, in Figure 8 (a), {a, b, c, d} with edges {(a, b), (b,
c), (c, d), (d, a)} do not form a SPP-routing ring since the
shortest path from b to d is not included in it and it is not
shortest path completed. Thus, our readers should not be
confused between a ring and a SPP-routing ring. A SPP-routing
ring is a ring sub-graph in a graph, but a ring sub-graph may
not necessarily be a SPP-routing ring.
Theorem 3. Assume that in a network, routing table
structure of Case 2 is adopted. If the maximum length of its
SPP-routing rings of the switch graph is no more than 3, the
shortest path protocol is optimal in terms of meeting both
delivery guarantee and loop-less criteria.
Reader is referred to Appendix for the complete proof.
Thus, if in a system, its maximum length of SPP-routing rings
is no more than 3, the shortest path scheme will be truly
effective. The question is if this condition can be easily met.
We argue this is the case in practice. This is because in-vehicle
networks are usually expected to have a small number (say,
less than 6) of switches and they are usually well connected.
Consequently, their switch graphs are unlikely to contain a
large SPP-routing ring. For example, it can be easily proved
that the switch graph in Figure 8 (a) meets this condition.
Case 3.
Recall that, in this case, the routing table uses more
information than that of both Cases 1 and 2. Message types,
input port IDs, and source node identifications are all used to
identify messages in routing. We have the following result.
Theorem 4. Assume that in a network, routing table
structure of Case 3 is adopted. Then the shortest path routing
scheme is optimal in terms of meeting both criteria of delivery
guarantee and loop-less criteria for any network topology.
Reader is referred to Appendix for the complete proof.
Thus, for the systems of this case, the shortest path routing
scheme is recommended.
We now like to make some remarks to conclude Section
IV.B. We analyze the performance of routing schemes in terms
of delivery guarantee and loop-less routing in the three cases of
routing table structures. Generally speaking, the criterion of
delivery guarantee is easy to realize, and the loop-less criterion
has been a focus for the discussion here.
As discussed in the above three cases, more information
contained in the group identifiers is used for routing, more
effective a routing scheme can be.
The length of the routing tables in Case 1 is the
shortest. However, as we have shown, the general
problem is NP hard and the shortest path protocol is
virtually ineffective.
The length of the routing tables in Case 2 is the
second shortest. While the general problem is still NP
hard, the shortest path protocol is optimal as long as
network topology meets certain condition. We argue
that in in-vehicle networks, this condition can be
easily met. Thus, the shortest path scheme is effective
in the domain of in-vehicle networks for this case.
The length of the routing tables in Case 3 is the
longest. The problem is no longer NP hard and the
shortest path protocol is the optimal one. The
problem is that the routing tables used here may be
significantly larger than that in Cases 1 and 2, making
it costly to be utilized in practical system. Note that in
automobile industry, cost is a sensitive issue. While a
router in the Internet may cost thousands of dollars,
switches in the in-vehicle networks we consider here
are expected to have a cost in the order of ten dollars
or less.
The three different routing table structures present the
different tradeoffs between hardware/software cost and routing
performance and provide with designer multiple options.
C. Verification of Link-Capability and Real-Time Criteria
To verify if the real-time requirement can be met is a
challenging topic and usually requires a study of different
methodology from routing schemes. However, recently a new
method called utilization-based schedulability testing [LL73]
[LWF96] [SAA04] [WLZ05] has been developed that
significantly reduces the complexity of the problem. With this
method, one should model network, traffic and real-time
requirement and derive a link utilization bound (say, ). Then,
the verification of real-time requirement will become simple:
if the utilization of payload traffic on a link is less than
percent of the link capacity, real-time requirement is met. In
other words, if we replace link capacity B by B =B, then the
verification of meeting real-time requirement is actually
reduced to verification of link capacity (in terms of B). Thus,
once can be properly derived, we no longer need to develop
an independent verification method for meeting real-time
requirement. We would like to refer readers to [ACZD92],
[ACZD94], [CXLBZ00], and [WXBZ04] for methodologies of
deriving . In the rest of this subsection, we will focus on
verification methods of link capacity.
Let us assume that the link capacity of the system is B.
2
There are m message types in the system, and for message type
i, its bandwidth requirement is b
i
. Let d be the longest path of
any message in the system. The following theorem provides a
sufficient condition under which the link capacity criterion will
be satisfied.
Theorem 5. The link capacity criterion is met if
(1)
Proof: As the length of the longest path is no more than d,
there are at most d+1 switches along any path, denoted them as
{v
1
, v
2
, , v
d+1
}. In the worst case, every switch along the path
except v
d+1
relays messages of type i towards v
d+1
. Then the
cumulated bandwidth on the last link, v
d
tov
d+1
, is d x b
i
. In the
worst case, all the m types of messages behave like this.
Therefore, the summation of bandwidth requirement on the last
link is which must be no more than B in order to
meet the link capacity criterion.
2
As discussed above, B should be normalized by if real-time requirement is
of concern.
8
With this theorem, we can derive a simpler verification
condition for the shortest path scheme.
Corollary 1. Assume that the shortest path scheme is used
and that d* is the diameter of the switch graph. Then, the link
capacity criterion is met if
(2)
The proof of this corollary is straightforward. Depending
on the routing scheme, (1) or (2) can be used to verify if the
link capacity criterion can be met.
V. FINAL REMARKS
In this paper, we propose the switch-based network
architecture for an in-vehicle digital communication system.
This network architecture is compatible with most of the
existing in-vehicle systems and aims at providing flexibility,
scalability, reliability, and cost efficiency. Due to the
performance requirements and the specific communication
mode of the in-vehicle systems, the major challenge of the
proposed solution is the development of routing schemes. We
analyze routing schemes with different routing table structures.
We propose four criteria of delivery guarantee, loop less, link-
capacity and real time and use them to evaluate routing
schemes in the proposed network. In particular, we discover
that the shortest path method will perform well in a wide range
of networks used for in-vehicle communication. In general, the
results of our work clearly reveal performance tradeoffs among
different routing schemes and provide guidelines for network
design in practice.
The work reported in this paper is fundamental but
preliminary, and many extensions are possible. In our proposed
switch-based in-vehicle system, the switch design in both
hardware and software is vital to the effectiveness of the entire
system. One of our ongoing efforts is to design and prototype
hardware and software that realize the proposed low-cost
switches. Another interesting extension is to explore the
capability of fault tolerance for the switch-based networks.
With the introduction of fault tolerance criteria, more design
spaces need to be explored. For example, one may choose to
provide routing schemes with built-in fault tolerance capability
(i.e., transmitting redundant copies of a message in the
network) or to consider schemes with dynamic fault detection
and reconfiguration (of routing tables). These alternative
approaches are expected to offer various performance tradeoffs
and are certainly worth a comprehensive investigation.
REFERENCES
[ABD99] Audi AG, BMW AG, Daimler Chrysler AG, Motorola Inc. Volcano
Communication Technologies AB, Volkswagen AG, and Volvo Car
Corporation, LIN specification and LIN press announcement, SAE World
Congress Detroit, http://www.lin-subbus.org, 1999.
[ACZD92] G. Agrawal, B. Chen, W. Zhao, and S. Davari, Guaranteeing
Synchronous Message Deadlines with the Timed Token Protocol, in
Proceedings of IEEE International Conference on Distributed Computing
Systems, J une 1992.
[ACZD94] G. Agrawal, B. Chen, W. Zhao, and S. Davari, Guaranteeing
Synchronous Message Deadlines with the Timed Token Medium Access
Control Protocol, in IEEE Transactions on Computers, vol. 43, no. 3, pp.
327-339, March 1994.
[AFF99] L. Almeida, J .A. Fonseca, and P. Fonseca, A Flexible Time-
Triggered Communication System Based on the Controller Area Network:
Experimental Results, in Proceedings of International Symposium on
Fieldbus Technology, 1999.
[AFH03] J . Axelsson, J . Froberg, H. Hansson, C. Norstrom, K. Sandstrom,
and B. Villing, A comparative case study of distributed network architectures
for different automotive applications, Technical Report, MRTC, 2003.
[Alb04] A. Albert, Comparison of event-triggered and time-triggered
concepts with regards to distributed control systems, in Proceedings of
Embedded World Conference, pp. 235252, 2004.
[AST03] A. Albert, R. Strasser, and A. Trachtler, Migration from CAN to
TTCAN for a Distributed Control System, in Proceedings of 9th international
CAN in Automation Conference, vol.5, pp. 9-16, 2003.
[ASV04] F. Ataide, M.M. Santos, and F. Vasques, A comparison of the
communication impact in CAN and TTP/C networks when supporting steer-
by-wire systems, in Proceedings of IEEE International Conference on
Industrial Technology, vol.2, pp. 1078-1083, Dec. 2004.
[Ban99] R. Bannatyne, Time Triggered Protocol: TTP/C, Embedded
Systems Programming, pp. 76-86, Mar. 1999.
[BB03] I. Broster and A. Burns, An analysable bus-guardian for event-
triggered communication, in Proceedings of 24th IEEE Real-Time Systems
Symposium, pp. 410-419, Dec. 2003.
[BE01] J . Berwanger, C. Ebner, and et al., FlexRay--The Communication
System for Advanced Automotive Control Systems, in SAE World Congress,
Society of Automotive Engineers Press, no. 2001-01-0676, Apr. 2001.
[Bev01] M. Beveridge, J ini on the control area network (can): a case study
in portability failure, Master thesis, Carnegie Mellon University, 2001.
[Bos91] Robert Bosch, CAN specification 2.0, Parts A and B, Sep. 1991.
[Cho95] E. G. Chowanietz, Automobile Electronics in the 1990s. Part 1:
Powertrain Electronics, in J ournal of Electronics and Communication
Engineering, vol. 7, no. 1, pp. 23- 36, 1995.
[CKMNP07] J .A. Cook, I.V. Kolmanovsky, D. McNamara, E.C. Nelson, and
K.V. Prasad, Control, Computing and Communications: Technologies for the
Twenty-First Century Model T, in Proceedings of the IEEE , vol.95, no.2,
pp.334-355, Feb. 2007.
[CSS00] P. Castelpietra, F. Simonot-Lion, Y.-Q. Song, and M. Attia,
Performance Evaluation of a Multiple Networked in-Vehicle Embedded
Architecture, in Proceedings of WFCS2000, 2000.
[CVV05] G. Cena, A. Valenzano, and S. Vitturi, Advances in automotive
digital communications, in Computer Standards & Interfaces, vol. 27, no. 6,
pp. 665-678, J une 2005.
[CXLBZ00] B. Choi, D. Xuan, C. Li, R. Bettati, and W. Zhao, Scalable QoS
Guaranteed Communication Services for Real-Time Applications, in
Proceedings of IEEE International Conference on Distributed Computing
Systems, Apr. 2000.
[DBK03] M. Ditze, R. Bernhardi, G. Kamper, and P.Altenbernd, Porting the
Internet Protocol to the Controller Area Network, in RTLIA, 2003.
[DF06] M. Dinkel and D. Fengler, Unified Communication in Heterogeneous
Automotive Control Systems, in Proceedings of the 3rd International
Workshop on Intelligent Transportation, Mar. 2006.
[Dod01] D.S. Dodge, Gateways - 101, in the Proceedings of IEEE Military
Communications Conference, vol.1, pp. 532-538, 2001.
[EKP96] H. Ekiz, A. Kutlu, E.T. Powner, Design and implementation of a
CAN/CAN bridge, in Proceedings of Second International Symposium on
Parallel Architectures, Algorithms, and Networks, pp.507-513, 12-14 J un.
1996.
[EKP97] H. Ekiz, A. Kutlu, and E.T. Powner, Implementation of CAN/CAN
bridges in distributed environments and performance analysis of bridged CAN
systems using SAE benchmark, in Proceedings of IEEE Southeastcon 97,
pp.185-187, Apr. 1997.
[GN05] B. Gaujal and N. Navet, Maximizing the Robustness of TDMA
Networks with Applications to TTP/C, in Real-Time System, vol. 31, no. 1-
3, pp. 5-31, Dec. 2005.
[FMAPN00] J . Fonseca, E. Martins, L. Almeida, P. Pedreiras, and P. Neves,
Flexible Time-Triggered Protocol for CAN New Scheduling and
Dispatching Solutions, in Proceedings of 7th International CAN Conference,
Oct. 2000.
[HA04] P. F. Hokayem and C. T. Abdallah, Inherent Issues in Networked
Control Systems: A Survey, in Proceedings of 2004 American Control
Conference, pp. 4897-4902, 2004.
[HPZ07] M. Horauer, O. Praprotnik, M. Zauner, R. Holler, and P. Milbredt,
A Test Tool for FlexRay-based Embedded Systems, in International
Symposium on Industrial Embedded Systems, pp. 349-352, J ul. 2007.
9
[Kan92] V. Kann, On the Approximability of NP-complete Optimization
Problems, PhD thesis, Department of Numerical Analysis and Computing
Science, Royal Institute of Technology, 1992.
[KB02] J . Kaiser and C. Brudna, A publisher/subscriber architecture
supporting interoperability of the CAN-Bus and the Internet, in Proceedings
of 4th IEEE International Workshop on Factory Communication Systems, pp.
215-222, 2002.
[KBM03] J . Kaiser, C. Brudna, C. Mitidieri, and C. Pereira, COSMIC: A
Middleware for Event-Based Interaction on CAN, in Proceedings of 9th
IEEE International Conference on Emerging Technologies and Factory
Automation, 2003.
[KG94] H. Kopetz and G. Grnsteidl, TTP-A Protocol for Fault-Tolerant
Real-Time Systems, in Computer, vol. 27, no. 1, pp.14-23, J an 1994.
[KHE00] H. Kopetz, M. Holzmann, and W. Elmenreich, A Universal Smart
Transducer Interface: TTP/A, In Proceedings of 3rd IEEE International
Symposium On Object-oriented Real-time Distributed Computing, Mar. 2000.
[KHM03] N. Kandasamy, J . P. Hayes, and B.T. Murray, Dependable
Communication Synthesis for Distributed Embedded Systems, in
Proceedings of Computer Safety, Reliability and Security Conference, pp.
275288, 2003.
[KHM04] N. Kandasamy, J .P. Hayes, and B.T. Murray, Dependable
communication synthesis for distributed embedded systems, in Proceedings
of International Conference on Computer Safety, Reliability and Security,
Sep. 2003.
[Koo02] P. Koopman, Critical embedded automotive networks, in IEEE
Micro, vol. 22, no. 4, pp. 14-18, J ul./Aug. 2002.
[Kop01] H. Kopetz, A Comparison of TTP/C and FlexRay, Research
Report 10/2001, TU Wien, May 2001.
[Kop99] H. Kopetz, Automotive electronics, in Proceedings of 11th
Euromicro Conference on Real-Time Systems, pp.132-140, 1999.
[KWMH96] J . G. Kassakian, H. Wolf, J . M. Miller, and C. J . Hurton,
Automotive electrical systems circa 2005, in IEEE Spectrum, vol. 33, no. 8,
pp. 22-27, Aug. 1996.
[LAE08] P. Lindgren, S. Aittamaa, and J . Eriksson, IP over CAN,
Transparent Vehicular to Infrastructure Access, in Proceedings of 5th IEEE
Consumer Communications and Networking Conference, pp. 758-759, 2008.
[LH02a] G. Leen and D. Heffernan, Expanding automotive electronic
systems, in Computer, vol.35, no.1, pp.88-93, J an. 2002.
[LH02b] G. Leen and D. Heffernan, TTCAN: A New Time-Triggered
Controller Area Network, in Microprocessors and Microsystems, vol. 26, no.
2, pp. 7794, 2002.
[LHD99] G. Leen, D. Heffernan, and A. Dunne, Digital networks in the
automotive vehicle, in Computing & Control Engineering J ournal , vol.10,
no.6, pp.257-266, Dec. 1999.
[LL73] C. L. Liu and J . W. Layland, Scheduling algorithms
formultiprogramming in a hard-real-time environment, in J ournal of ACM,
vol. 20, no. 1, pp. 4661, J an. 1973.
[LWF96] J . Liebeherr, D. E. Wrege, and D. Ferrari, Exact admission control
for networks with a bounded delay service, in IEEE/ACM Transaction on
Networking, vol. 4, no. 6, pp. 885901, 1996.
[MM99] J . McQueen and B. McQueen, Intelligent Transportation Systems
Architectures, Boston, USA, Artech House Books, 1999.
[MOST] MOST Cooperation, MOST Specification, Nov. 2002.
[MSK07] T. Moon, S. Seo, J . Kim, S. Hwang, and J . J eon, Gateway system
with diagnostic function for LIN, CAN and FlexRay, in Proceedings of
International Conference on Control, Automation and Systems, pp.2844-2849,
Oct. 2007.
[NHB05] T. Nolte, H. Hansson, and L. Bello, Automotive Communications -
Past, Current and Future, in Proceedings of 10th IEEE International
Conference on Emerging Technologies and Factory Automation, 2005.
[NSSW05] N. Navet, Y. Song, F. Simonot-Lion, and C. Wilwert, Trends in
Automotive Communication Systems, in Proceedings of IEEE, vol.93, no.6,
pp.1204-1223, J un. 2005.
[O07] R. Obermaisser, A Model-Driven Framework for the Generation of
Gateways in Distributed Real-Time Systems, in Proceedings of 28th IEEE
international Real-Time Systems Symposium, 2007.
[OPK05a] R. Obermaisser, P. Peti, and H. Kopetz, Virtual Gateways in the
DECOS Integrated Architecture, in Proceedings of 19th IEEE International
Parallel and Distributed Processing Symposium, Apr. 2005.
[OPK05b] R. Obermaisser, P. Peti, and H. Kopetz, Virtual networks in an
integrated time-triggered architecture, in Proceedings of 10th IEEE
International Workshop on Object-oriented Real-time Dependable Systems,
2005.
[PEP05] P. Pop, P. Eles, and Z. Peng, Analysis and optimisation of
heterogeneous real-time embedded systems, in IEE Proceedings on
Computers and Digital Techniques, vol. 152, no. 2, pp. 130-147, Mar. 2005.
[PEP04]P. Pop, P. Eles, Z. Peng, V. Izosimov, M. Hellring, and O. Bridal,
Design optimization of multi-cluster embedded systems for real-time
applications, in Proceedings on Design, Automation and Test in Europe
Conference and Exhibition, vol. 2, no. 16-20, pp. 1028-1033, Feb. 2004.
[RSG05] M. Rabel, A. Schmeiser, H.P. Grobmann, Ad-hoc in-car
networking concept, in Proceedings of IEEE Intelligent Transportation
Systems, pp. 363-368, 13-15 Sept. 2005.
[SAA04]L. Sha, T. Abdelzaher, K. Arzen, A. Cervin, T.Baker, A. Burns, G.
Buttazzo, M. Caccamo, J . Lehoczky, and A. K. Mok, "Real Time Scheduling
Theory: A Historical Perspective," in J ournal of Real-time Systems, col. 28,
no. 2-3, 2004.
[SAE93] Class C Application Requirement Considerations, SAE Technical
Report J 2056/1, J un. 1993.
[SB07] J . Sommer and R. Blind, Optimized Resource Dimensioning in an
embedded CAN-CAN Gateway, in Proceedings of International Symposium
on Industrial Embedded Systems, pp. 55-62, J ul. 2007.
[SBF05] J .-L. Scharbarg, M. Boyer, and C. Fraboul, CAN-Ethernet
architectures for real-time applications, in Proceedings of 10th IEEE
Conference on Emerging Technologies and Factory Automation, vol. 2, pp. 8,
19-22 Sept. 2005.
[SBF06] J . Sommer, L. Burgstahler, and V. Feil, An Analysis of Automotive
Multi-Domain CAN Systems, in Proceedings of 12th EUNICE Open
European Summer School, 2006.
[SHL06] S. Shaheen, D. Heffernan, and G. Leen, A gateway for time-
triggered control networks, in Microprocessors and Microsystem, vol. 31, no.
1, pp. 38-50, Feb. 2007.
[SJ W08] G. Sung, C. J uan, C. Wang, Bus Guardian Design for automobile
networking ecu nodes compliant with FlexRay standards, in Proceedings of
IEEE International Symposium on Consumer Electronics, pp. 1-4, Apr. 2008.
[SLH06] S. Seo, S. Lee, S. Hwang, and J . J eon, Development of Network
Gateway Between CAN and FlexRay Protocols For ECU Embedded
Systems, in Proceedings of International J oint Conference on SICE-ICASE,
pp. 2256-2261, Oct. 2006.
[TB94] K. Tindell and A. Burns, Guaranteed Message laten-cies for
Distributed Safety-Critical Hard Real Time Con-trol Networks, Technical
Report YCS229, Department of Computer Science, University of York, May
1994.
[Tre02] N.R. Trevett, X-by-Wire, New Technologies for 42V Bus
Automobile of the Future, PhD thesis, South Carolina Honors College, 2002.
[TTP99] TTTech Computertechnik AG, Specification of the TTP/C Protocol,
1999.
[TY03] M. Tokunaga and S. Yoshida, Advanced Functionality of Vehicle
Gateways, SEI Technical Review, no.55, pp. 55-59, J an. 2003.
[WNSS04] C. Wilwert, N. Navet, Y.-Q. Song, and F. Simonot-Lion, Design
of automotive X-by-Wire systems, The Industrial Communication
Technology Handbook, R. Zurawski, Ed. Boca Raton, FL: CRC, 2004.
[WLZ05] J . Wu, J . Liu, and W. Zhao, On Schedulability Bounds of Static
Priority Schedulers, in Proceedings of IEEE Real-Time and Embedded
Technology and Applications Symposium, Mar. 2005.
[WLZ07] J . Wu, J . Liu, and W. Zhao, Utilization-Bound Based
Schedulability Analysis of Weighted Round Robin Schedulers, in
Proceedings of 28th IEEE Real-Time Systems Symposium, Dec. 2007.
[WXBZ04] S. Wang, D. Xuan, R. Bettati, and W. Zhao, Providing Absolute
Differentiated Services for Real-Time Applications in Static-Priority
Scheduling Networks, in IEEE/ACM Transactions on Networking, vol. 12,
no. 2, pp. 326-339, Apr. 2004.
[YLZ08] S. Yang, W. Li, and W. Zhao, Analysis of Routing Schemes for
Switch-Based In-Vehicle Networks, Technical Report, Department of
Computer Science, Rensselaer Polytechnic Institute, Aug. 2008.
10
Appendix
In this section, we will present the proofs of theorems, and
related definitions and lemmas. For proving Theorem 1, we
need two lemmas: the first one is to show that the computation
complexity of determining whether there exists a feasible
message path set is equvelant to that of determining whether
there exists a feasible generated DAG; the second one is to
show that determination of the existence of a feasible generated
DAG is NP-complete. Then, we result in Theorem 1.
For proving Theorem 2, we need three lemmas: Lemma 3
and Lemma 4 are used to prove the set of switch-based graphs
and the set of port-based graphs have a one-to-one mapping,
and this mapping function is efficiently computable. That is,
there exists a polynomial time complexity algorithm for the
mapping function; Lemma 5 is to show if a port-based graph
has circles then its mapped switch-based graph will also have
circles, and vice versa. From these lemmas, we can get the
result of Theorem 2.
For Theorem 3, we first show that the worst-case message
set is the one with all nodes being senders/receivers in Lemma
6. Then we prove the necessary and sufficient condition for
SPP to be feasible in Case 2.
For Theorem 4, we prove the SPP scheme is optimal in
Case 3.
Next, we will present the detailed proofs.
Definition 5. A switch-based in-vehicle system is modeled
as a directed graph , where each subnet or
switch is a node in V
s
, and the connection between switches,
and switch and its subnets are directed links in A. An arc
is considered to be directed from x to y. The arc
is called the arc inverted. The number
of nodes in is denoted as . The number of arcs in is
denoted as .
Definition 6. The messages in the system is denoted as M =
{m
i
| m
i
=(i, S
i
, R
i
, b
i
), }, where i is the message type
number, S
i
is the sender set, R
i
is the receiver set, and b
i
is the
bandwidth requirement of this message. There are M types of
messages in the system.
Note that to make the notation simple, when we study on a
certain message type in the following, we use S and R to denote
its sender/receiver set.
Definition 7. A directed acyclic graph is a directed graph
with no directed cycles, that is, for any
vertex v, there is no nonempty directed path that starts and ends
on v. If is a sub graph of and is directed acyclic,
we say is a generated DAG of .
Definition 8. Given a generated DAG of , we say
it is a feasible generated DAG if in :
Condition I. For any and , there exists a
path .
Definition 9. For a given directed path p ={ , , },
if and , we call as a message path. If any
node in this path will appear only once, we call p as a feasible
message path.
It is obvious that the path defined in Condition I. must be a
feasible message path from to .
Definition 10. Given that two paths and have the
same node set V and different arc set and . For any two
nodes and , which are connected by an arc
and , if for any , there is an arc
and , i.e., , we say
is an inverted path of (and vice versa), and we denote
the inverted path of as .
Definition 11. For a given directed graph , we call a
path set as a feasible message path set if satisfies: For
any and , their feasible message path exists and
is in .
Definition 12. If a path is a sub graph of path ,
i.e., , we say is the sub path of .
Definition 13. Given any two paths and , if there
exist sub paths , , and , have same
start node and end node, then we say and have an
alternative route.
Definition 14. If a path set , we call as an
acyclic feasible message path set if satisfies: For any two
feasible message paths and in , and has no
alternative route.
Lemma 1. For a given system , for any message type
with S and R, if and only if a feasible generated DAG exists, an
acyclic feasible message path set for this message exists.
Proof of Lemma 1.
First we prove the necessity of the condition. That is, for a
given topology , if an acyclic feasible message path set
exists, then a feasible generated DAG must exist.
11
We assume that graph has an acyclic feasible message
path set but has no feasible generated DAG, which means:
1) For directed graph , no generated DAG exist, or
2) All possible generated DAG of do not satisfy
Condition I.
For the case 1), it is obviously that for any bidirectional
graph , there exists at least one generated DAG. So, case 1)
does not hold.
Case 2) means a generated DAG that contains at least one
path from any sender to any receiver does not exist. According
to the definition, feasible message path is a sub graph of .
So we first use union operation to joint all paths in
together, and we denote the resulting graph as . It is easy to
know that , and there are no cycles in . This also
means is a generated DAG of . Therefore there exists
a feasible generated DAG that contains at least one path from
any sender to any receiver.
So, in both cases the assumptions are not true, and the
necessity of the condition holds.
Next we prove the sufficiency of the condition. That is, for
a given topology, if a feasible generated DAG exists, then an
acyclic feasible message path set must exist.
We assume that graph has a feasible generated DAG
but no acyclic feasible message path set. That is, there is a
graph that satisfies the following conditions:
1) There exists node and with no feasible
message path between them, or
2) Feasible message path set exists, but no acyclic feasible
message path set.
Case 1) means, for node and , a) no message
path between them exists or, b) their message paths exist, but
all these paths have loops. For a), if it holds, then and will
not connect to each other. This will conflict to the definition of
feasible generated DAG, which requires that any sender and
any receiver must have a path. For b), since all possible paths
between and have loops, none of these paths will appear
in any feasible generated DAG.
Case 2) means there exist two feasible message paths
and , ,
. and satisfy: 1) and has an alternative
route, 2) there does not exist another feasible message path
from to that makes and has no alternative
route (otherwise and will not be chosen to construct
acyclic feasible message path set). This means for any feasible
message path from to and any feasible message
path from to , and will have an
alternative route. However, from the definition of feasible
generated DAG, we know that there must exit a path
from to and a path from to , which make
and have no alternative route.
Therefore, in both cases the assumption can not hold, and
the sufficiency of conditions is proved.
Definition 15. A feedback arc set (FAS) is a set of edges
which, when removed from the graph, leave a DAG. In other
words, it is a set containing at least one edge of every cycle in
the graph [Kan92].
Lemma 2. Given a directed graph , finding a feasible
generated DAG is NP-complete.
Proof of Lemma 2.
Next we convert this problem to feedback arc set problem
which is a NP-complete problem.
Feedback arc set problem: Given a directed
graph and a positive integer k, whether there
exits a subset with such that A' contains at
least one arc from every directed cycle in . [Kan92]
We assume that there is a polynomial algorithm which
can find a feasible generated DAG.
This means that, given , S and R, we can find a feasible
generated DAG in polynomial time with . Since the
specification of S and R is independent to the configuration of
, we can use a modified algorithm to find a feasible
generated DAG of any given directed graph by:
1) labeling nodes in with sets S and R, and then
2) using algorithm to find out a feasible generated DAG.
Because step 1) can be finished in polynomial time,
algorithm can be finished in polynomial time. Then we get:
Given any directed graph , there exists an algorithm
, which can find a feasible generated DAG in polynomial
time.
According to the definition of feasible generated DAG,
there is no cycle in any feasible generated DAG. This means,
algorithm can find out all possible cycles in and
choose correct directions of each arcs to avoid cycles. That is,
for any possible cycles in , algorithm must remove one
or more arcs in this cycle to break the cycle. This also means
that, using algorithm we can construct an arc set, by
removing which the graph will have no cycles. This arc set
is the feedback arc set problem defined. However, as we know,
12
feedback arc set problem has been proved as a NP-complete
problem, so our assumption here will not hold.
Theorem 1. Assume that in a network, routing table
structure of Case 1 is adopted. Then, the problem of
determining whether there exist a routing table that meets both
criteria of delivery guarantee and loop less is NP-complete.
Proof of Theorem 1.
We only have to prove that determining whether there
exists a routing table that meets the criteria of loop less is NP-
complete. That is, for any given topology defined in Definition
5 and message set defined in Definition 6, determining if there
exists an acyclic feasible message path set is NP-complete.
We assume that we can find an acyclic feasible message
path set in polynomial time. That is, for a given system with
topology , and an arbitrary message with S and R, there
exists a polynomial algorithm which can find an acyclic
feasible message path set for the system. If we find out an
acyclic feasible message path set by , then we would know
that the system must have a feasible generated DAG. We can
determine whether has a feasible generated DAG in
polynomial time. Obviously, this conflicts to the conclusion of
Lemma 2. Therefore, the assumption we made is not true and
Theorem 1 holds.
Definition 16. For a given directed graph
and , if for any two nodes , , there is an
arc from to , then we call this graph an internal port
graph. It is obvious that an internal port graph is a
complete graph.
Definition 17. Given two internal port graphs and ,
for any two nodes and , the arc from
to is called link arc of and .
Definition 18. Given a set of internal port graphs
and a set of link arcs , is
union of the internal port graph set and link arc set, if
satisfies followings we say is a port-based graph:
1) For any internal port graph, it has at least one link arc
with any other internal port graph,
2) For any two internal port graphs, they have only one link
arc if they have link arcs.
Definition 19. All link arcs of construct a set , and
all nodes of construct a set .
Definition 20. All possible switch-based graphs construct a
set .
Definition 21. All possible port-based graphs construct a
set .
From Theorem 1, we know that for a given system with
topology , and an arbitrary message with S and R, there are
no polynomial algorithms to find an acyclic feasible message
path set for the system.
Then our problem to be solved in Theorem 2 can be equally
changed to, for a given system with any topology of ,
whether there exists a polynomial algorithm to find an acyclic
feasible message path set for the system.
To prove it, we first prove that port-based graph set has a
one-to-one relation to switch-based graph set.
Definition 22. If there exists a bijection
function , we say f is a port-based graph
mapping function from to .
Lemma 3. There exists a bijection
function .
Proof of Lemma 3.
We first construct a as following:
We use a node mapping function . That is,
given a port-based graph , for any of its internal port
graph , will mapping each internal node set to one
and only one node in .
We use a link mapping function , which will
mapping each arc in to one and only one arc in . That is,
for each link arc , ,
, and , .
Then we use these two functions to construct a new graph
based on a port-based graph.
Obviously, will construct a graph and it is a
switch-based graph defined before.
From the definition of , we know that given a port-based
graph we can generate a unique switch-based graph.
13
Next, we will give the definition of , i.e.,
.
The meaning of function is to mapping a switch to its
port set, and all these ports are fully connected. This also
means given a switch node, will mapping one and only
one port set, i.e., one and only one internal port graph.
The meaning of function is that, for a given arc
in , , we will replace with a port in
and replace with a port in .
This also means, given an arc in switch-based graph, function
will mapping one and only one link arc in port-based
graph. Then for any given switch-based graph, will
mapping it to one and only one port-based graph.
So, for any port-based graph, there exists a bijection
function which mapping it to a switch-based graph.
Lemma 4. The bijection functions and are
efficiently computable.
Proof of Lemma 4.
An efficiently computable mapping is
equal to there exists an algorithm with polynomial complexity
which can determine if for any there is one and
only one that satisfy .
First we will analyze the complexity of function link
mapping function h. In function h, we need to search all
possible internal port graphs, whose complexity will not
exceed .
Next, for the node mapping function g, for each link arc, we
need to find the internal port graphs connected to this arc,
whose complexity will be .
Therefore the complexity of function will not exceed
, and then function is
efficiently computable. That is, there exists a polynomial
algorithm that can transform a port-based graph to one and
only one switch-based graph. Similarly, we can prove is
also efficiently computable.
Lemma 5. A switch-based graph has a circle if and only
if has a circle which contains link arcs.
Proof of Lemma 5.
We first prove the sufficiency. That is, if
has a circle which contains link arcs, then
will contain a circle. According to the definition of
and , if has a circle which contain link arcs, the circle
will contain two switches connected. That is, the circle will
pass through these two switches infinitely. Therefore, in a
switch-based graph, these two switches will be on a circle.
Next, we will prove the necessity. That is, if has a
circle, will have a circle which contain link
arcs. This means that the circle in includes multiple
switches and arcs. According to the definition of and ,
in there exists a circle that pass through multiple internal
graphs no matter how ports are connected. In addition, because
there are at least two switches in this circle, at least one link arc
will be contained in this circle.
Theorem 2. Assume that in a network, routing table
structure of Case 2 is adopted. Then, the problem of
determining whether there exist routing tables that meet both
criteria of delivery guarantee and loop less is NP-complete.
Proof of Theorem 2.
Similar to the proof of Theorem 1, here we will only have
prove that the problem of determining whether there exist
routing tables that meet the criteria of loop less is NP-complete.
That is, we need to prove that for any given port-based graph, it
is NP-complete to determine if there exists an acyclic feasible
message path set.
We assume that there is a polynomial complexity algorithm
that can determine if a port-based graph has circles and for
each circle if it contains link arcs. Then for any switch-based
graph , according to Lemma 4, we can use an algorithm
with polynomial complexity to generate a port-based
graph . So, by algorithm we can determine
whether has circles and if these circles have link arcs.
Therefore, according to Lemma 5, we can also determine
whether has circles. That is, we can use polynomial
complexity algorithm to determine if a switch-based graph has
a circle.
However, according to the result of Theorem 1, finding a
circle in switch-based graphs is NP-complete. Our assumption
does not hold. Therefore, it is NP-complete to determine
whether a port-based graph has a circle.
Definition 23. From a given message type i with sender set
S and receiver set R, sender switch set is a set
including all switch nodes whose attached subnets have
senders; receiver switch set , is a set including all
switch nodes whose attached subnets have receivers.
14
Definition 24. For a given message type i, and a switch
graph G, NET
i
=(V, E, V
SD
, V
RV
). When a routing protocol (RP)
satisfies the delivery guarantee and loop-less criteria on G for
this message type, we denote as f(NET
i
, RP)=1; otherwise,
f(NET
i
, RP)=0.
Definition 25. NET* ={NET
i
| NET
i
=(V, E, V
SD
, V
RV
)} is
the set of NETs corresponding to all possible message types.
Definition 26. A NET
w
is the worst case for a switch graph
G, if for any NET
i
in NET*, when f(NET
i
, RP)=0, f(NET
w
,
RP)=0.
Lemma 6. For a switch graph G, NET
w
= (V, E, V
SD
, V
RV
)
is the worst case for any RP, which guarantees the delivery.
Proof of Lemma 6.
We use contradiction to prove. If the lemma is not true,
then there exists a NET
i
= (V, E, V
SD
, V
RV
), where
or . f(NET
i
, RP)=0,
f(NET
w
, RP)=1. RP is a routing protocol.
f(NET
w
, RP)=1, and v
i
V
and v
j
V, using RP the
message is routed correctly from v
i
to v
j
in NET
w
.
f(NET
i
, RP)=0. Therefore, there exists a v
i
V
SD
and a v
j
V
RV
, when using RP to route the message from v
i
to v
j
, since RP
guarantees the delivery, the message route forms a routing
loop.
Since the sender/receiver switch set of NET
i
is a subset of
that of NET
w
, the output ports of each entry of the routing
tables of NET
i
is a subset of that of NET
w
. Since RP is
deterministic, the message generated from v
i
to v
j
forms a
routing loop based on the tables in NET
w
. Therefore, f(NET
w
,
RP)=0.
This is contradicted by the assumption. Therefore, NET
w
is
the worst case.
In the following proof, we assume the worst-case message
specification, that is, the sender/receiver switch sets are both V.
Theorem 3. Assume that in a network, routing table
structure of Case 2 is adopted. If the maximum length of its
SPP-routing rings of the switch graph, if exists, is 3, the
shortest path protocol (SPP) is optimal in terms of meeting
both delivery guarantee and loop-less criteria.
Proof of Theorem 3.
i) First to prove the condition that l is 3 is the necessary
condition for SPP to be feasible. We prove if there exists a
SPP-routing ring of G that has length larger than 3, SPP can
not guarantee loop less.
We use {v
1
, v
2
, , v
l
} to represent this SPP-routing ring,
l>3. Other than the ports connecting to its own subnets, each
switch node, v
i
, has two ports connecting to two other switches,
v
i-1
andv
i+1
. As this is a ring, v
l+1
=v
1
.
Prove this by induction. Let l =4, we show the theorem
holds.
Without loss of generality, we can assume that the subnet
of switch v
1
generates a message. Note that we consider here
all switches in both the sender and receiver switch sets (the
worst case). Using SPP, v
1
relays the message to v
2
since this is
the shortest path from v
1
to v
2
. v
2
will then relay the message to
v
3
since it is on the shortest path from v
1
to v
3
in this SPP-
routing ring.
Consequently, the message will be routed to v
4
and then v
1
.
When v
1
receives this message from v
4
, it will be routed to v
2
again. Because v
1
is on the shortest path from v
4
to v
2
.
Hence, message is relayed in the SPP-routing ring with no
halt in the sequences of {v
1
, v
2
, v
3
, v
4
}. This is a routing loop
and SPP does not satisfy loop less.
Now, we assume that the theorem holds for l =k and show
that it will hold for l =k+1, (k>=4).
If when l =k, the SPP-routing ring forms a routing loop,
when l =k+1, the message generated from v
1
, as in the l =k
SPP-routing ring, will be relayed via v
2
, v
3
, , to v
k
.
Since v
k
is on the shortest path from v
k-1
to v
k+1
in the SPP-
routing ring of l =k+1, v
k
relays the message to v
k+1
. v
k+1
then
relays it to v
1
again since it is on the shortest path from v
k
to v
1
.
Hence, message is relayed in the SPP-routing ring with no
halt in the sequences of {v
1
, v
2
, , v
k+1
}. This is a routing loop
and SPP does not satisfy loop less.
ii) Then to prove that l is 3 is the sufficient condition for
SPP to satisfy loop less. This is, if SPP does not satisfy the loop
less for G, l must be larger than 3.
When SPP does not guarantee the loop less, there exists a
routing loop. We use {v
1
, v
2
, , v
x
} to represent the nodes that
are included in the routing loop. Next we first prove that x > 3.
Case a) When x is 2, v
1
does not relay message from v
2
back
to v
2
since it is not on the shortest path from v
2
to v
2
. v
2
does not
relay message from v
1
back to v
1
. Therefore, {v
1
, v
2
} does not
form a routing loop.
Case b) When x is 3, v
1
does not relay message from v
2
to v
3
since it is not on the shortest path from v
2
to v
3
. v
2
and v
3
are the
same. Therefore, {v
1
, v
2
, v
3
} does not form a routing loop.
Therefore, we have that x > 3.
We now to prove that with a SPP routing loop {v
1
, v
2
, ,
v
x
} and x is lager than 3 (according to previous result), there
exists SPP routing ring with length larger than 3.
We use induction in the following proof.
x is 4, we show that {v
1
, v
2
, , v
x
} forms a SPP-routing
ring.
In the routing loop of {v
1
, v
2
, v
3
, v
4
}, v
i
relays message from
v
i-1
to v
i+1
. Using SPP, it means v
i
is on the shortest path from v
i-
1
to v
i+1
. Therefore, there is no direct connection between v
i-1
and v
i+1
.
Therefore, there is no direct connection between v
1
and v
3
,
or between v
2
and v
4
. {v
1
, v
2
, v
3
, v
4
} forms a SPP-routing ring.
Now we assume that when x is k, {v
1
, v
2
, , v
x
} forms a
SPP-routing ring. Then we prove that when x is k+1, there is a
SPP-routing ring.
Since when x is k, {v
1
, v
2
, , v
k
} forms a SPP-routing ring.
With v
k+1
included in the routing loop, v
k+1
must be on the
15
shortest path from v
k
to v
1
. That is to say, there is no direct
connection between v
k
and v
1
.
Since v
1
needs to be on the shortest path from v
k+1
to v
2
,
there is no direct connection between v
k+1
and v
2
. This is the
same with v
k+1
and v
k-1
.
If v
k+1
has no connection to nodes in {v
3
, v
2
, , v
k-2
}, {v
1
,
v
2
, , v
k+1
} forms a SPP routing ring.
Otherwise, we assume that there is a connection between
v
k+1
and v
i
, 2<i<k-1. When v
i
gets the message from v
i-1
, since it
is on the shortest path from v
i-1
to v
k+1
, it will forward the
message to v
k+1
, too. Then {v
1
, v
2
, , v
i
, v
k+1
} is also a routing
loop, and since x is no larger than k and no smaller than 4 in
this case, {v
1
, v
2
, , v
i
, v
k+1
} forms a SPP-routing ring.
That is to say, when x is k+1, either {v
1
, v
2
, , v
i
, v
k+1
}
forms a SPP-routing ring or there exists a SPP-routing ring.
Therefore, there exists a SPP-routing ring. This is
contradicted by the assumption that all SPP-routing rings in G
have numbers smaller equal to 3.
When a given switch graph has no SPP-routing ring, that is,
either there is only one node in G, or G forms a tree structure, it
is obvious that SPP satisfies the loop-less criteria.
Theorem 4. Assume that in a network, routing table
structure of Case 3 is adopted. Then the shortest path routing
scheme is optimal in terms of meeting both criteria of delivery
guarantee and loop-less criteria for any network topology.
Proof of Theorem 4.
Using SPP, given a message type, for each sender node,
there is a subgraph of the switch graph that forms a tree
structure rooted at the sender node and with all the receiver
nodes as leaves. The routing tables are established based on
these tree structures.
When there is only one node in the sender set of the
message, one routing tree exists. Obviously, the switches only
need to relay message from their parents to the children on the
tree. Therefore, the delivery guarantee and loop less are
satisfied.
When there is more than one senders of the message,
correspondingly, several trees are established in the routing
tables. However, since source information is embedded in the
message, the switches can distinguish which tree to use to relay
the message. Therefore, it is the same situation with one sender
node routing. Therefore, delivery is guaranteed and there is no
routing loop.
You might also like
- Missing AnswersDocument8 pagesMissing AnswersManzil TanvirNo ratings yet
- 10 5923 J Ajsp 20110102 07Document6 pages10 5923 J Ajsp 20110102 07markuleNo ratings yet
- (4G Tehnology-A Sensation: This Paper Describes An Architecture For Differentiation of QualityDocument17 pages(4G Tehnology-A Sensation: This Paper Describes An Architecture For Differentiation of QualityshazaadaNo ratings yet
- Les Cahiers Du GERADDocument41 pagesLes Cahiers Du GERADAndreso LozadabNo ratings yet
- Flexray 1Document8 pagesFlexray 1gangn zangNo ratings yet
- 10.1007@s11277 020 07578 7Document13 pages10.1007@s11277 020 07578 7Lotfi AllouNo ratings yet
- Written by Jun Ho Bahn (Jbahn@uci - Edu) : Overview of Network-on-ChipDocument5 pagesWritten by Jun Ho Bahn (Jbahn@uci - Edu) : Overview of Network-on-ChipMitali DixitNo ratings yet
- Adaptive Clustering For Mobile Wireless Networks : Chunhung Richard Lin and Mario GerlaDocument21 pagesAdaptive Clustering For Mobile Wireless Networks : Chunhung Richard Lin and Mario GerlaPratyushNo ratings yet
- Time-Sensitive Networking in Automotive Embedded Systems - State of The Art and Research OpportunitiesDocument15 pagesTime-Sensitive Networking in Automotive Embedded Systems - State of The Art and Research Opportunitiessmyethdrath24No ratings yet
- An ns3 Based Simulation Testbed For In-Vehicle Communication NetworksDocument10 pagesAn ns3 Based Simulation Testbed For In-Vehicle Communication NetworksthirusriviNo ratings yet
- A Qos Framework For Heterogeneous Networking: Mahdi Aiash, Glenford Mapp, and Aboubaker LasebaeDocument5 pagesA Qos Framework For Heterogeneous Networking: Mahdi Aiash, Glenford Mapp, and Aboubaker LasebaeMauricio Alexander Vargas RodríguezNo ratings yet
- Real-Time Error Measurement System For MVB ProtocolDocument7 pagesReal-Time Error Measurement System For MVB Protocolerode els erodeNo ratings yet
- Resource Literature ReviewDocument5 pagesResource Literature ReviewpriyaNo ratings yet
- Smart Traffic Management in High-Speed Networks by Fuzzy Logic ControlDocument7 pagesSmart Traffic Management in High-Speed Networks by Fuzzy Logic ControlInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Traffic Isolation and Network Resource Sharing For Performance Control in GridsDocument6 pagesTraffic Isolation and Network Resource Sharing For Performance Control in Gridsmax37No ratings yet
- 000000da PDFDocument24 pages000000da PDFMukesh KumarNo ratings yet
- Abid 2013Document7 pagesAbid 2013Brahim AttiaNo ratings yet
- AdhocDocument17 pagesAdhocSripriya GunaNo ratings yet
- A Metering Infrastructure For Heterogenous Mobile NetworksDocument8 pagesA Metering Infrastructure For Heterogenous Mobile NetworksLuisa CatalinaNo ratings yet
- The Use of NGN / IMS For Cloud and Grid Services Control and ManagementDocument6 pagesThe Use of NGN / IMS For Cloud and Grid Services Control and ManagementJasmina BerbićNo ratings yet
- Hierarchical Wireless Network Architecture For Distributed ApplicationsDocument6 pagesHierarchical Wireless Network Architecture For Distributed ApplicationsabojablNo ratings yet
- Latency Minimization GlobecomDocument6 pagesLatency Minimization GlobecomWESLEY GERALDO SAMPAIO DA NOBREGANo ratings yet
- New Elements in Vehicle Communication "Media Oriented Systems Transport" ProtocolDocument5 pagesNew Elements in Vehicle Communication "Media Oriented Systems Transport" ProtocolMADDYNo ratings yet
- Exploiting The Advantages of Connectionless and Connection-Oriented NetworksDocument37 pagesExploiting The Advantages of Connectionless and Connection-Oriented NetworksBaby balochNo ratings yet
- Related Virtual Exhibits: Nortel NetworksDocument17 pagesRelated Virtual Exhibits: Nortel NetworksmabvieiraNo ratings yet
- Integration of LTE and Wi-Fi Using Link AggregationDocument6 pagesIntegration of LTE and Wi-Fi Using Link AggregationManmeet Singh Khurana0% (1)
- Infrastructure To Vehicle Real Time Secured Communication: Ms - Smita Narendra Pathak, Prof - Urmila ShrawankarDocument5 pagesInfrastructure To Vehicle Real Time Secured Communication: Ms - Smita Narendra Pathak, Prof - Urmila ShrawankarChennamsetyNo ratings yet
- Jupiter Rising: A Decade of Clos Topologies and Centralized Control in Google's Datacenter NetworkDocument15 pagesJupiter Rising: A Decade of Clos Topologies and Centralized Control in Google's Datacenter NetworkTaraka Ramarao MNo ratings yet
- Vehicle-to-Vehicle Safety Messaging in DSRCDocument10 pagesVehicle-to-Vehicle Safety Messaging in DSRCAnupam SamantaNo ratings yet
- VPMN - Virtual Private Mobile Network Towards Mobility-as-a-ServiceDocument5 pagesVPMN - Virtual Private Mobile Network Towards Mobility-as-a-ServiceNguyen Hai HongNo ratings yet
- Congestion Control Algorithm33Document5 pagesCongestion Control Algorithm334nn21is019No ratings yet
- Icas2008 Icase Icase Icase Icase Icase Icase Icase Icase Icase Icase Icase IcaseDocument6 pagesIcas2008 Icase Icase Icase Icase Icase Icase Icase Icase Icase Icase Icase IcaseradislamyNo ratings yet
- Java IEEE AbstractsDocument24 pagesJava IEEE AbstractsMinister ReddyNo ratings yet
- Abstract: Due To Significant Advances in Wireless Modulation Technologies, Some MAC Standards Such As 802.11aDocument6 pagesAbstract: Due To Significant Advances in Wireless Modulation Technologies, Some MAC Standards Such As 802.11aVidvek InfoTechNo ratings yet
- Vanet Traffic Report All ReDocument93 pagesVanet Traffic Report All Rebengbengbeng666000No ratings yet
- Juenal CorbaDocument12 pagesJuenal CorbaLaura Veronika Diah MousehunterNo ratings yet
- Design and Implementation of A UCA-based Substation Control SystemDocument8 pagesDesign and Implementation of A UCA-based Substation Control Systemsupachaik6151No ratings yet
- Controller Area NetworkDocument51 pagesController Area Networkmaster vijayNo ratings yet
- Ren 2016Document11 pagesRen 2016Hiba AyoubNo ratings yet
- Fuzzy Congestion Control and Policing in ATM Networks: Ming-Chang HuangDocument20 pagesFuzzy Congestion Control and Policing in ATM Networks: Ming-Chang HuangNeha DadhichNo ratings yet
- Simplified Wireless Connectivity For 5gDocument6 pagesSimplified Wireless Connectivity For 5gflaunayNo ratings yet
- Networks NotesDocument14 pagesNetworks NotesmthemburefilwesmileyNo ratings yet
- Functional Enhancements of Cooperative Session Control For "Minimum Core" ArchitectureDocument9 pagesFunctional Enhancements of Cooperative Session Control For "Minimum Core" ArchitectureKaan Avşar AsanNo ratings yet
- Research On Self-Organizing Software Radio Network: Xiungquun Zheng, Wei QingchunDocument5 pagesResearch On Self-Organizing Software Radio Network: Xiungquun Zheng, Wei QingchunRavi Kumar DubeyNo ratings yet
- Computer Network Long Questions & AnswerDocument12 pagesComputer Network Long Questions & Answersravan123No ratings yet
- Approaches For In-Vehicle Communication - An Analysis and OutlookDocument17 pagesApproaches For In-Vehicle Communication - An Analysis and Outlookkrishna prasathNo ratings yet
- IJEAS0307026Document8 pagesIJEAS0307026erpublicationNo ratings yet
- A Simulation Framework For Cluster-Based Web Services: Emiliano CasalicchioDocument13 pagesA Simulation Framework For Cluster-Based Web Services: Emiliano CasalicchioIan NazarethNo ratings yet
- Modeling and Analysis of End-To-End Delay For Ad Hoc Pervasive Multimedia NetworkDocument6 pagesModeling and Analysis of End-To-End Delay For Ad Hoc Pervasive Multimedia NetworkSagar SwamyNo ratings yet
- Vanet CloudDocument3 pagesVanet Cloudhadji salimNo ratings yet
- A Novel Traffic Capacity Planning Methodology For LTE Radio Network DimensioningDocument5 pagesA Novel Traffic Capacity Planning Methodology For LTE Radio Network DimensioningRizky WahyudiNo ratings yet
- Opnet ResearchDocument7 pagesOpnet Researchhossam80No ratings yet
- Design of An In-Vehicle Network (Using Lin, Can and Flexray), Gateway and Its Diagnostics Using Vector CanoeDocument6 pagesDesign of An In-Vehicle Network (Using Lin, Can and Flexray), Gateway and Its Diagnostics Using Vector Canoesarah bejaouiNo ratings yet
- Wireless Mesh RoutingDocument6 pagesWireless Mesh RoutingSatish NaiduNo ratings yet
- Tim - Sensitive NetworkingDocument12 pagesTim - Sensitive NetworkingKarthyyy RNo ratings yet
- A Simulation Framework For Energy-Aware Wireless Sensor Network ProtocolsDocument7 pagesA Simulation Framework For Energy-Aware Wireless Sensor Network ProtocolsNESEGANo ratings yet
- Performance Evaluation of Control Networks: Ethernet, Controlnet, and DevicenetDocument33 pagesPerformance Evaluation of Control Networks: Ethernet, Controlnet, and DevicenetSudheerNo ratings yet
- Design and Analysis of Low-Power Access Protocols For Wireless and Mobile ATM NetworksDocument15 pagesDesign and Analysis of Low-Power Access Protocols For Wireless and Mobile ATM NetworkshaddanNo ratings yet
- Modeling and Dimensioning of Mobile Wireless Networks: From GSM to LTEFrom EverandModeling and Dimensioning of Mobile Wireless Networks: From GSM to LTENo ratings yet
- Networking Programming with C++: Build Efficient Communication SystemsFrom EverandNetworking Programming with C++: Build Efficient Communication SystemsNo ratings yet
- Athalon CM & Crixus ™ User ManualDocument19 pagesAthalon CM & Crixus ™ User ManualAlex ParampampamNo ratings yet
- LIT2103 R6 PD12C 15B 17A Service ManualDocument48 pagesLIT2103 R6 PD12C 15B 17A Service ManualAlex Parampampam100% (1)
- LIT2103 R6 PD12C 15B 17A Service ManualDocument40 pagesLIT2103 R6 PD12C 15B 17A Service ManualAlex Parampampam100% (2)
- Design of On-Board Software For An Experimental SatelliteDocument10 pagesDesign of On-Board Software For An Experimental SatelliteAlex ParampampamNo ratings yet
- Toward Monitoring Fault-Tolerant Embedded Systems (Extended Abstract)Document3 pagesToward Monitoring Fault-Tolerant Embedded Systems (Extended Abstract)Alex ParampampamNo ratings yet
- CS310 Assignment 2Document3 pagesCS310 Assignment 2sanil.prasadNo ratings yet
- Share 1.1.2 - Concept of Network and TCP - IP ModelDocument54 pagesShare 1.1.2 - Concept of Network and TCP - IP ModelSRISHTI SEYOGINo ratings yet
- of Data ReplicationDocument24 pagesof Data Replicationexon1123No ratings yet
- .Cryptography in Cloud Computing A Basic Approach To Ensure Security in Cloud PDFDocument4 pages.Cryptography in Cloud Computing A Basic Approach To Ensure Security in Cloud PDFHaimy mathaiNo ratings yet
- Chapter 7Document3 pagesChapter 7zhenzhenzhenNo ratings yet
- Avi Vantage Platform Data SheetDocument6 pagesAvi Vantage Platform Data SheetSarah AliNo ratings yet
- pcm1760p LDocument15 pagespcm1760p LДенис БраславскийNo ratings yet
- FleetMon S1-C Satellite TransponderDocument2 pagesFleetMon S1-C Satellite TransponderTaufikNo ratings yet
- Using Drone: Ils / Vor / PapiDocument28 pagesUsing Drone: Ils / Vor / Papifika puteraNo ratings yet
- Massive Mimo: Huawei Technologies Co., LTDDocument41 pagesMassive Mimo: Huawei Technologies Co., LTDturi313No ratings yet
- Equick Guide Osdp V2 Protocol V1.0 PDFDocument11 pagesEquick Guide Osdp V2 Protocol V1.0 PDFAdli Yaumil HakimNo ratings yet
- At T Mobility Device Unlock Code InstructionsDocument28 pagesAt T Mobility Device Unlock Code InstructionsSamuelZabalaPayare100% (2)
- H49020 - Help Desk Manual April 2013Document31 pagesH49020 - Help Desk Manual April 2013vandarsNo ratings yet
- Lab 3 Technical Report: Tools Used: Wireshark, Snort OS: Ubuntu 18.04Document17 pagesLab 3 Technical Report: Tools Used: Wireshark, Snort OS: Ubuntu 18.04Roger ZhangNo ratings yet
- Westermo Ds Merlin 2109 en ReveDocument4 pagesWestermo Ds Merlin 2109 en ReveJuan PerezNo ratings yet
- Aircell Axxess Cabin Communication Systems For Aircrafts IJERTV2IS3449Document6 pagesAircell Axxess Cabin Communication Systems For Aircrafts IJERTV2IS3449locoboeingNo ratings yet
- CableFree Amber Crystal HPR MIMO AC2X2 Radio DatasheetDocument3 pagesCableFree Amber Crystal HPR MIMO AC2X2 Radio DatasheetiomeritoNo ratings yet
- Lab 7Document7 pagesLab 7mayudesk deskNo ratings yet
- Errors in DFT ProcessingDocument20 pagesErrors in DFT Processinghamza abdo mohamoudNo ratings yet
- Introduction To Communication Systems and Networks: Dr. Farid Farahmand Updated 8/31/2010Document44 pagesIntroduction To Communication Systems and Networks: Dr. Farid Farahmand Updated 8/31/2010martoomNo ratings yet
- SyncroB - It Data SheetDocument5 pagesSyncroB - It Data SheetMiguel BorgesNo ratings yet
- An Enhanced Public Key Infrastructure To Secure Smart Grid Wireless Communication NetworksDocument15 pagesAn Enhanced Public Key Infrastructure To Secure Smart Grid Wireless Communication NetworksSenthil KumarNo ratings yet
- 04 SS7Document54 pages04 SS7Kulbhushan Singh BishtNo ratings yet
- 810G-5PI-Industrial Unmanaged Switch - Jan 2023Document2 pages810G-5PI-Industrial Unmanaged Switch - Jan 2023NavneetNo ratings yet
- Supervised by Ass. Prof. Dr. Mohammed Najim Abd-AllahDocument47 pagesSupervised by Ass. Prof. Dr. Mohammed Najim Abd-AllahIhab AmerNo ratings yet
- Ibs Distributed AntennasDocument19 pagesIbs Distributed AntennasMazenRedaNo ratings yet
- AEQA AirScale MAA 64T64R 192 AE B42 200 W DescriptionDocument5 pagesAEQA AirScale MAA 64T64R 192 AE B42 200 W Description'Theodora GeorgianaNo ratings yet
- Welcome To Network For You IP Addressing: NetworkforyouDocument7 pagesWelcome To Network For You IP Addressing: NetworkforyouKu Abhi100% (1)
- FINAL QueStion Bank FYBCOM BCDocument2 pagesFINAL QueStion Bank FYBCOM BCy.zadaneNo ratings yet
- High Speed NetworksDocument11 pagesHigh Speed NetworksNehru VeerabatheranNo ratings yet