Exercise Muscle Fatigue Detection System Implementation Via Wireless Surface Electromyography and Empirical Mode Decomposition
Exercise Muscle Fatigue Detection System Implementation Via Wireless Surface Electromyography and Empirical Mode Decomposition
Download as pdf or txt
You might also like
- YathirajavimsathyDocument32 pagesYathirajavimsathyPankajashree RaghuNo ratings yet
- YathirajavimsathyDocument32 pagesYathirajavimsathyPankajashree RaghuNo ratings yet
- The Challenge:: 3. Situation AnalysisDocument11 pagesThe Challenge:: 3. Situation Analysisshabaz198667% (3)
- Content: 2. Literature Survey 3. Problem Definition 4. Objective 5. Methodology 6. ReferencesDocument10 pagesContent: 2. Literature Survey 3. Problem Definition 4. Objective 5. Methodology 6. ReferencesImran ShaikhNo ratings yet
- 06608802Document7 pages06608802aisha00052693No ratings yet
- Non-Invasive Detection of Low-Level Muscle Fatigue Using Surface EMG With Wavelet DecompositionDocument5 pagesNon-Invasive Detection of Low-Level Muscle Fatigue Using Surface EMG With Wavelet DecompositionMuhammad Fauzi D4 ElektromedikNo ratings yet
- EMG Signal Features Extraction of Different Arm Movement For Rehabilitation Device PDFDocument12 pagesEMG Signal Features Extraction of Different Arm Movement For Rehabilitation Device PDFulfahrifNo ratings yet
- Dario Farina, Luigi Fattorini, Francesco Felici and Giancarlo FilligoiDocument12 pagesDario Farina, Luigi Fattorini, Francesco Felici and Giancarlo FilligoiJen PassilanNo ratings yet
- Electromyography (EMG) Based Control For Shoulder Muscles: Long Doan Thanh, Nhon Phan Nguyen QuyDocument5 pagesElectromyography (EMG) Based Control For Shoulder Muscles: Long Doan Thanh, Nhon Phan Nguyen QuyPhan Nguyễn Quy NhơnNo ratings yet
- Identification Method of Human Movement Intention Based On The Fusion Feature of EEG and EMGDocument5 pagesIdentification Method of Human Movement Intention Based On The Fusion Feature of EEG and EMGjimmie_yagerNo ratings yet
- EEG-Based Communication and Control: Short-Term Role of FeedbackDocument5 pagesEEG-Based Communication and Control: Short-Term Role of Feedbackdamaya1701No ratings yet
- 1 s2.0 S1050641107001459 MainDocument7 pages1 s2.0 S1050641107001459 MainLenny YouNo ratings yet
- Sensors: A Brain-Machine Interface Based On ERD/ERS For An Upper-Limb Exoskeleton ControlDocument14 pagesSensors: A Brain-Machine Interface Based On ERD/ERS For An Upper-Limb Exoskeleton ControlLucas da SilvaNo ratings yet
- Nazmi 2015Document6 pagesNazmi 2015u5600291No ratings yet
- 2017 - Noise-Assisted Multivariate Empirical Mode Decomposition For Multichannel EMG SignalsDocument17 pages2017 - Noise-Assisted Multivariate Empirical Mode Decomposition For Multichannel EMG SignalsedsondidierNo ratings yet
- Development of EMG Sensor For Transfemoral Amputation (Knee Flexor and Knee Extensor)Document5 pagesDevelopment of EMG Sensor For Transfemoral Amputation (Knee Flexor and Knee Extensor)seventhsensegroupNo ratings yet
- seizure non seizure classificationDocument4 pagesseizure non seizure classificationseemamehlalockdownNo ratings yet
- Identification of Hand Movements From ElDocument12 pagesIdentification of Hand Movements From ElAlyaa GhaziNo ratings yet
- On-the-Field Resistance-Tubing Exercises For Throwers: An Electromyographic AnalysisDocument8 pagesOn-the-Field Resistance-Tubing Exercises For Throwers: An Electromyographic AnalysisJaime SotoNo ratings yet
- Design and Development of A Practical Muscle Fatigue MonitorDocument7 pagesDesign and Development of A Practical Muscle Fatigue MonitorPankajashree Raghu100% (1)
- Controlling Wheelchair Using ElectroencephalogramDocument7 pagesControlling Wheelchair Using ElectroencephalogramSaurabh MishraNo ratings yet
- EMG BruxismoDocument1 pageEMG BruxismoLiane Conterato RamosNo ratings yet
- Air University PaperDocument11 pagesAir University PaperMuhammad Ali AhmedNo ratings yet
- BSP OelDocument7 pagesBSP OelAli AliNo ratings yet
- 5 - An EMG Patch For The Real-Time Monitoring of Muscle-Fatigue Conditions During ExerciseDocument15 pages5 - An EMG Patch For The Real-Time Monitoring of Muscle-Fatigue Conditions During ExerciseTEJAS BAKSHINo ratings yet
- Standards For Suface Electromyography: The European Project Surface EMG For Non-Invasive Assessment of Muscles (SENIAM)Document6 pagesStandards For Suface Electromyography: The European Project Surface EMG For Non-Invasive Assessment of Muscles (SENIAM)tissbadreddineNo ratings yet
- Normalization of EMG Signals: Optimal MVC Positions For The Lower Limb Muscle Groups in Healthy SubjectsDocument8 pagesNormalization of EMG Signals: Optimal MVC Positions For The Lower Limb Muscle Groups in Healthy SubjectsFahad SherwaniNo ratings yet
- Fpga PDFDocument16 pagesFpga PDFlmaraujo67No ratings yet
- Denoising of EMG Signals Based On Wavelet Transform: N. M. SobahiDocument7 pagesDenoising of EMG Signals Based On Wavelet Transform: N. M. SobahiTher SitaNo ratings yet
- Principal Component Analysis of Electromyographic Signals: An OverviewDocument5 pagesPrincipal Component Analysis of Electromyographic Signals: An OverviewSailesh ConjetiNo ratings yet
- Analise EmgDocument36 pagesAnalise EmgBruno SantosNo ratings yet
- Human Gait Analysed by An Artificial Neural Network ModelDocument4 pagesHuman Gait Analysed by An Artificial Neural Network Modelstroci4047No ratings yet
- 05 T07.P12 80 PDFDocument1 page05 T07.P12 80 PDFGideão O BarbosaNo ratings yet
- Comparative Analysis of Machine Learning Algorithms On Myoelectric Signal From Intact and Transradial Amputated LimbsDocument9 pagesComparative Analysis of Machine Learning Algorithms On Myoelectric Signal From Intact and Transradial Amputated LimbsIAES IJAINo ratings yet
- Classification of Gait Phases From Lower Limb EMG: Application To Exoskeleton OrthosisDocument4 pagesClassification of Gait Phases From Lower Limb EMG: Application To Exoskeleton OrthosisshravantataNo ratings yet
- 9 Adaptive Threshold To Compensate The Effect of Muscle Fatigue On Elbow-Joint Angle Estimation Based On ElectromyographyDocument11 pages9 Adaptive Threshold To Compensate The Effect of Muscle Fatigue On Elbow-Joint Angle Estimation Based On ElectromyographyTriwiyanto TriwiyantoNo ratings yet
- 2 - Remosion de Artefactos 2Document109 pages2 - Remosion de Artefactos 2Lucía del ValleNo ratings yet
- As As As As As As As AsDocument5 pagesAs As As As As As As AsIbrahim Basar AkaNo ratings yet
- Detection and Removal of Non-Responsive Channels and Trials in Evoked Potentials Using Median TestDocument10 pagesDetection and Removal of Non-Responsive Channels and Trials in Evoked Potentials Using Median TestsipijNo ratings yet
- Ijbb 121 PDFDocument8 pagesIjbb 121 PDFRahma WatiNo ratings yet
- Single Channel EMG Classification With Ensemble Empirical Mode Decomposition Based ICA For Diagnosing Neuromuscular DisordersDocument10 pagesSingle Channel EMG Classification With Ensemble Empirical Mode Decomposition Based ICA For Diagnosing Neuromuscular DisordersRama BayuNo ratings yet
- Two Degrees of Freedom Dynamic Hand Wrist EMG - 2019 - Journal of ElectromyogDocument9 pagesTwo Degrees of Freedom Dynamic Hand Wrist EMG - 2019 - Journal of ElectromyogA.M. SaadNo ratings yet
- Analysis of Human PPG, ECG and EEG Signals by Eigenvector MethodsDocument8 pagesAnalysis of Human PPG, ECG and EEG Signals by Eigenvector MethodsShafayet UddinNo ratings yet
- A New Method For Recording Temporomandibular Joint Sounds and Electrical Jaw Muscle Activity in Relation To Jaw Opening DegreeDocument7 pagesA New Method For Recording Temporomandibular Joint Sounds and Electrical Jaw Muscle Activity in Relation To Jaw Opening DegreeBo Buon BaNo ratings yet
- Literature Review Draft 1 - FYP1Document8 pagesLiterature Review Draft 1 - FYP1Naavalan Krishnaga Art'wNo ratings yet
- Applsci 10 01605 v2Document14 pagesApplsci 10 01605 v2Susan KunkleNo ratings yet
- Recognition of Basic Hand Movements Using ElectromyographyDocument13 pagesRecognition of Basic Hand Movements Using ElectromyographyIlaria PacificoNo ratings yet
- SENIAMDocument5 pagesSENIAMradzinger065No ratings yet
- Bci-Ssvep Final ReviewedDocument8 pagesBci-Ssvep Final ReviewedMuhammad AgungNo ratings yet
- Research Article: Evaluation of Motor Neuron Excitability by CMAP Scanning With Electric Modulated CurrentDocument6 pagesResearch Article: Evaluation of Motor Neuron Excitability by CMAP Scanning With Electric Modulated CurrentDebarunAcharyaNo ratings yet
- EEG Signal Analysis and Characterization For The Aid of Disabled PeopleDocument8 pagesEEG Signal Analysis and Characterization For The Aid of Disabled PeopleShafayet UddinNo ratings yet
- Denoising in Biomedical Signals Using Ensemble Empirical Mode DecompositionDocument7 pagesDenoising in Biomedical Signals Using Ensemble Empirical Mode DecompositionPankajashree RaghuNo ratings yet
- Standards For Suface Electromyography: The European Project Surface EMG For Non-Invasive Assessment of Muscles (SENIAM)Document6 pagesStandards For Suface Electromyography: The European Project Surface EMG For Non-Invasive Assessment of Muscles (SENIAM)mohsin aliNo ratings yet
- Identification of Significant Intrinsic Mode Functions For The Diagnosis of Induction Motor FaultDocument6 pagesIdentification of Significant Intrinsic Mode Functions For The Diagnosis of Induction Motor Faultsantha1191No ratings yet
- A Comparative Study On PCA and LDA Based EMG Pattern Recognition For Anthropomorphic Robotic HandDocument6 pagesA Comparative Study On PCA and LDA Based EMG Pattern Recognition For Anthropomorphic Robotic HandYazanAlomariNo ratings yet
- Man Herle Lazea DAAAMDocument2 pagesMan Herle Lazea DAAAMSergiu ManNo ratings yet
- Elimination of Electrocardiogram Contamination From Electromyogram Signals: An Evaluation of Currently Used Removal TechniquesDocument13 pagesElimination of Electrocardiogram Contamination From Electromyogram Signals: An Evaluation of Currently Used Removal TechniquesShafayet HossainNo ratings yet
- tmpCB1A TMPDocument5 pagestmpCB1A TMPFrontiersNo ratings yet
- An Integrated Fall Prevention System With Single-Channel EEG and EMG SensorDocument7 pagesAn Integrated Fall Prevention System With Single-Channel EEG and EMG SensorNG Jun HowNo ratings yet
- 2008 - Uso Eficiente de Energia No Setor Hospitalar - Hospitais PúblicosDocument13 pages2008 - Uso Eficiente de Energia No Setor Hospitalar - Hospitais PúblicosademargcjuniorNo ratings yet
- On-Line EEG Classification During Externally-Paced Hand Movements Using A Neural Network-Based ClassifierDocument10 pagesOn-Line EEG Classification During Externally-Paced Hand Movements Using A Neural Network-Based ClassifierAshwajit MaskeNo ratings yet
- YmdDocument204 pagesYmdPankajashree RaghuNo ratings yet
- Vakyapadiya With Eng TransDocument274 pagesVakyapadiya With Eng TransPankajashree RaghuNo ratings yet
- Uttararmacharit 00 BhavgoogDocument116 pagesUttararmacharit 00 BhavgoogPankajashree RaghuNo ratings yet
- Vedantasara of Sri Ramanujacharya Translated by V KrishnamacharyaDocument494 pagesVedantasara of Sri Ramanujacharya Translated by V KrishnamacharyaPankajashree RaghuNo ratings yet
- The Life of RamanujacharyaDocument271 pagesThe Life of RamanujacharyaPankajashree RaghuNo ratings yet
- GD011 - Swami Desika DarsanamDocument88 pagesGD011 - Swami Desika DarsanamPankajashree Raghu100% (2)
- Koil Olugu English 1954Document106 pagesKoil Olugu English 1954Pankajashree RaghuNo ratings yet
- Rationale of RahukalamDocument5 pagesRationale of RahukalamPankajashree RaghuNo ratings yet
- ASR On DesikaaDocument5 pagesASR On DesikaaPankajashree Raghu100% (1)
- Yathiraja SaptatiDocument291 pagesYathiraja SaptatiPankajashree RaghuNo ratings yet
- ThiruppallanduDocument84 pagesThiruppallanduPankajashree RaghuNo ratings yet
- Exo SkeltonDocument44 pagesExo SkeltonPankajashree Raghu100% (1)
- Design and Development of A Practical Muscle Fatigue MonitorDocument7 pagesDesign and Development of A Practical Muscle Fatigue MonitorPankajashree Raghu100% (1)
- Denoising in Biomedical Signals Using Ensemble Empirical Mode DecompositionDocument7 pagesDenoising in Biomedical Signals Using Ensemble Empirical Mode DecompositionPankajashree RaghuNo ratings yet
- Measuring Increase in Synchronization To Identify Muscle Endurance LimitDocument10 pagesMeasuring Increase in Synchronization To Identify Muscle Endurance LimitPankajashree RaghuNo ratings yet
- Fatigue PlotDocument44 pagesFatigue PlotPankajashree RaghuNo ratings yet
- A Tale of Two Cities, by Charles DickensDocument216 pagesA Tale of Two Cities, by Charles DickensPankajashree RaghuNo ratings yet
- Mca Dissertation Topic ListDocument7 pagesMca Dissertation Topic ListWriteMyPersuasivePaperKansasCity100% (1)
- Category: Section: MembersDocument3 pagesCategory: Section: MembersVinson Josaiah KasilagNo ratings yet
- Syloid C 907 SDSDocument11 pagesSyloid C 907 SDShazem ramadanNo ratings yet
- U.S. Car Makers Pencil in May 18 As Manufacturing Restart DateDocument30 pagesU.S. Car Makers Pencil in May 18 As Manufacturing Restart DateAnandeshwar HiremathNo ratings yet
- wg751-3Document44 pageswg751-3Shouzab AbbasNo ratings yet
- BN SugarcaneDocument11 pagesBN SugarcaneLalita KumariNo ratings yet
- Data Collection On Modified Engines On PureDocument50 pagesData Collection On Modified Engines On PurecoralonsoNo ratings yet
- Nature of Muslim Marriage 3rd YearDocument20 pagesNature of Muslim Marriage 3rd YearMegha BoranaNo ratings yet
- Ce - 4Document2 pagesCe - 4Keshav AgrawalNo ratings yet
- Listado Materias Primas 2Document20 pagesListado Materias Primas 2WALTER KLISSMANNo ratings yet
- AnglaisDocument4 pagesAnglaisAya El HadriNo ratings yet
- SCIENCE LP (Repaired)Document27 pagesSCIENCE LP (Repaired)christinejoybalusdanNo ratings yet
- Mezcladores IKAUSADocument36 pagesMezcladores IKAUSAjesusNo ratings yet
- HR Calculator - CERG - NTNU PDFDocument3 pagesHR Calculator - CERG - NTNU PDFBrij Mohan SinghNo ratings yet
- Final Project Plan-EvolutionDocument10 pagesFinal Project Plan-EvolutionJohanna MasdoNo ratings yet
- Safety Instructions ACS800 Multidrive and ACS800 Multidrive ModulesDocument14 pagesSafety Instructions ACS800 Multidrive and ACS800 Multidrive ModulesJuan Carlos HenaoNo ratings yet
- Executive Summary 2Document2 pagesExecutive Summary 2Jerry PerezNo ratings yet
- Van Den Bulck - Parental Guidenance of Children's Media000001Document31 pagesVan Den Bulck - Parental Guidenance of Children's Media000001josephabogado10No ratings yet
- Master The Basics BookletDocument6 pagesMaster The Basics BookletSapta Yin DonoghueNo ratings yet
- Super Very FinalDocument5 pagesSuper Very FinalLeanne YumangNo ratings yet
- Sil0499 504chDocument6 pagesSil0499 504chnabeel eidNo ratings yet
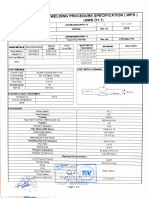
- Wps 15Document5 pagesWps 15Avishek GuptaNo ratings yet
- NAME: Sarah Mae R. Areglado Section: G12 Humss Silang SUBJECT: Understanding Culture, Society and PoliticsDocument6 pagesNAME: Sarah Mae R. Areglado Section: G12 Humss Silang SUBJECT: Understanding Culture, Society and PoliticsEsmen Areglado0% (1)
- 5 - Approaches in PsychologyDocument17 pages5 - Approaches in PsychologyKesithan AnandarashNo ratings yet
- Soalan 6 Why Is Community Service Important in Today's WorldDocument2 pagesSoalan 6 Why Is Community Service Important in Today's WorldcikgucinaNo ratings yet
- Daily Living Self Efficacy ScaleDocument8 pagesDaily Living Self Efficacy Scalespamemail00No ratings yet
- Forklift CatalogDocument20 pagesForklift CatalogScribdTranslationsNo ratings yet
- What Is A Magnetic Flow MeterDocument4 pagesWhat Is A Magnetic Flow MeterLarry SmithNo ratings yet
- MtknfcdtaDocument1 pageMtknfcdtaMuzaffar HussainNo ratings yet