DC Motor Speed C Bcontrol
DC Motor Speed C Bcontrol
Download as pdf or txt
You might also like
- Project On Linear Programming ProblemsDocument32 pagesProject On Linear Programming ProblemsJeeban BaralNo ratings yet
- Mini Project Report-2Document26 pagesMini Project Report-2Remya Ramakrishnan0% (2)
- Simulation & Controlling of Brushless DC Motor Using PI/Fuzzy HybridDocument4 pagesSimulation & Controlling of Brushless DC Motor Using PI/Fuzzy Hybridsunil kumarNo ratings yet
- Transportation ProblemDocument1 pageTransportation ProblemHina KhanNo ratings yet
- Closed Loop Control of Stepper Motor Without Position SensorDocument9 pagesClosed Loop Control of Stepper Motor Without Position SensorlamushkNo ratings yet
- Speed Control of Stepper MotorDocument15 pagesSpeed Control of Stepper MotormydearbhavaNo ratings yet
- Tahmid's Blog - AC Power Control With Thyristor - Phase Angle Control Using Triac With PIC16F877ADocument7 pagesTahmid's Blog - AC Power Control With Thyristor - Phase Angle Control Using Triac With PIC16F877ANhân TâmNo ratings yet
- Android Controlled Home AppliancesDocument60 pagesAndroid Controlled Home AppliancesWaseem AshrafNo ratings yet
- Automatic Tempearture Controlled FanDocument13 pagesAutomatic Tempearture Controlled FanAbin BabyNo ratings yet
- 3 Level InverterDocument63 pages3 Level InverterThirumal ValavanNo ratings yet
- Simulation Modeling of Inverter Controlled BLDC Drive Using Four SwitchDocument18 pagesSimulation Modeling of Inverter Controlled BLDC Drive Using Four SwitchCHEIF EDITORNo ratings yet
- Microprocessor Lab Manual SolutionDocument47 pagesMicroprocessor Lab Manual Solutionajwadkhan619No ratings yet
- Speed Control of BLDC Motor For Electric PDFDocument6 pagesSpeed Control of BLDC Motor For Electric PDFtarnaNo ratings yet
- Tms 320 F 28379 DDocument222 pagesTms 320 F 28379 DJuan Ku LosanoNo ratings yet
- Self Balancing RobotDocument9 pagesSelf Balancing RobotSebastianNo ratings yet
- DC Motor Speed Controller Design Using Pulse WidthDocument12 pagesDC Motor Speed Controller Design Using Pulse WidthHerman BachtiarNo ratings yet
- Tms320f2812 Based Implementation of Sensorless Control For BLDC MotorDocument10 pagesTms320f2812 Based Implementation of Sensorless Control For BLDC Motoranhdv1979No ratings yet
- A Vector Control System of PMSM With The Assistance of Fuzzy PID ControllerDocument6 pagesA Vector Control System of PMSM With The Assistance of Fuzzy PID ControllerFelix Adrian Trujillo PerdomoNo ratings yet
- A Further Study Into The Use of The PIC32MX250F128B, With Side Projects Using The AT91SAM3X8E (Arduino Due) and The Intel GalileoDocument15 pagesA Further Study Into The Use of The PIC32MX250F128B, With Side Projects Using The AT91SAM3X8E (Arduino Due) and The Intel Galileotahmidmc100% (2)
- Implementation OF Four Quadrant Operation OF BLDC Motor Using MPCDocument65 pagesImplementation OF Four Quadrant Operation OF BLDC Motor Using MPCsaisanketNo ratings yet
- Stepper Motor Positioning Control by IR RemoteDocument80 pagesStepper Motor Positioning Control by IR RemotesathishNo ratings yet
- Fpga Based BLDC Motor ControlDocument20 pagesFpga Based BLDC Motor ControlPreeti Mishra100% (1)
- LABVIEW OverviewDocument24 pagesLABVIEW OverviewbigirimwNo ratings yet
- V/F Based Speed Control of Induction Motor Using Simplified Fuzzy-PI ControllerDocument6 pagesV/F Based Speed Control of Induction Motor Using Simplified Fuzzy-PI ControllerNoor Hussain100% (1)
- Fuzzy Logic Based Speed Control of BLDC Motor PDFDocument5 pagesFuzzy Logic Based Speed Control of BLDC Motor PDFtewodros asfawNo ratings yet
- Water Level Indicator and Controller Using PIC MicrocontrollerDocument11 pagesWater Level Indicator and Controller Using PIC Microcontrollerweb100% (1)
- Programming A Cypress PSoC Using PSoC DesignerDocument12 pagesProgramming A Cypress PSoC Using PSoC DesignerThanhha NguyenNo ratings yet
- Project Status Review Semester: 7 EE (Group No: 2) Project I (2170001)Document51 pagesProject Status Review Semester: 7 EE (Group No: 2) Project I (2170001)UmangNo ratings yet
- CEA7 - 160 - Automatic Intelligent Plant IrrigationDocument79 pagesCEA7 - 160 - Automatic Intelligent Plant IrrigationInitz TechnologiesNo ratings yet
- Interface GSM Module With PICDocument7 pagesInterface GSM Module With PICahmad_wazierNo ratings yet
- Sharingan ThesisDocument69 pagesSharingan Thesisprince asadNo ratings yet
- Control of DC Motor in Labview by Using Ni-MyrioDocument4 pagesControl of DC Motor in Labview by Using Ni-MyrioIJSTENo ratings yet
- DC Motor Speed Control Using Pulse Width Modulation (PWM)Document30 pagesDC Motor Speed Control Using Pulse Width Modulation (PWM)अमरेश झाNo ratings yet
- Linux Based Speaking Medication Reminder ProjectDocument4 pagesLinux Based Speaking Medication Reminder ProjectEditor IJTSRDNo ratings yet
- Three-Phase Induction Motor Drive by FPGADocument6 pagesThree-Phase Induction Motor Drive by FPGAmani_kumar_16100% (2)
- DSP Processors and ArchitecturesDocument2 pagesDSP Processors and ArchitecturesVemuganti RahulNo ratings yet
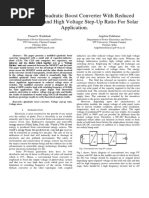
- A Modified Quadratic Boost Converter Wit PDFDocument6 pagesA Modified Quadratic Boost Converter Wit PDFkadr sherpa100% (1)
- ¡ Digital Control in Power Electronics¡ by Simone Buso and Paolo MattavelliDocument159 pages¡ Digital Control in Power Electronics¡ by Simone Buso and Paolo Mattavellidevchandar100% (3)
- Manual PLC FestoDocument77 pagesManual PLC Festoul15e5100% (1)
- TMS320C50 ArchitectureDocument2 pagesTMS320C50 ArchitectureParvatham Vijay100% (5)
- Iot Based Home AutomationDocument9 pagesIot Based Home AutomationBORN TO DIENo ratings yet
- Introduction & Stepper MotorDocument45 pagesIntroduction & Stepper Motorchappidi anushaNo ratings yet
- Design of A Real Time Smart Honking SystemDocument6 pagesDesign of A Real Time Smart Honking SystemArka MajumdarNo ratings yet
- Design of Buck Boost Converter Final Thesis PDFDocument53 pagesDesign of Buck Boost Converter Final Thesis PDFSusiNo ratings yet
- A Review On Control Techniques For Brushless DC (BLDC) MotorsDocument15 pagesA Review On Control Techniques For Brushless DC (BLDC) MotorsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Speed Control of Brushless DC Motor Using Fuzzy Logic ControllerDocument9 pagesSpeed Control of Brushless DC Motor Using Fuzzy Logic ControllerIOSRjournalNo ratings yet
- AC MotorDocument3 pagesAC MotormadhumithaaNo ratings yet
- Space Vector PWM - 1Document5 pagesSpace Vector PWM - 1guanitouNo ratings yet
- DC MOTOR GSM REORT FinalDocument28 pagesDC MOTOR GSM REORT FinalUMADEVI K MNo ratings yet
- Low Cost' Three Phase To Single Phase Matrix ConverterDocument6 pagesLow Cost' Three Phase To Single Phase Matrix ConverterRaghu RamNo ratings yet
- Automatic Engine Locking System Through Alcohol Detection For Drunken DriversDocument44 pagesAutomatic Engine Locking System Through Alcohol Detection For Drunken Driversyakshithreddy000No ratings yet
- Motor Control and Drive Design Solutions PDFDocument20 pagesMotor Control and Drive Design Solutions PDFBhausaheb BNo ratings yet
- Smart Power Processing For Energy Saving: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanDocument21 pagesSmart Power Processing For Energy Saving: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanAkhilrajscribdNo ratings yet
- An Overview of PLC Based Control Panel System For External Plunge Grinding Machine and CNC MachineDocument3 pagesAn Overview of PLC Based Control Panel System For External Plunge Grinding Machine and CNC MachineIJMERNo ratings yet
- Microprocessor Based Digital PID Controller For Speed Control of D.C. MotorDocument6 pagesMicroprocessor Based Digital PID Controller For Speed Control of D.C. MotorSwapnica GarreNo ratings yet
- DC Servomotor-Based Antenna Positioning Control System Using PidDocument15 pagesDC Servomotor-Based Antenna Positioning Control System Using PidSharanya Shree SubbaraoNo ratings yet
- Mydcmotorcontrol: Applying Control Theory To A Real DC Motor System in An Open-Loop ConfigurationDocument5 pagesMydcmotorcontrol: Applying Control Theory To A Real DC Motor System in An Open-Loop ConfigurationnorickespinosNo ratings yet
- Speed Control of DC Motor Using Pid Controller BasedDocument16 pagesSpeed Control of DC Motor Using Pid Controller Basedayesha amjadNo ratings yet
- PID Controller Based DC Motor Speed ControlDocument4 pagesPID Controller Based DC Motor Speed ControlEditor IJRITCCNo ratings yet
- A Master-Slave DSP Board For Digital ControlDocument5 pagesA Master-Slave DSP Board For Digital Controlfurious143No ratings yet
- 10 IrosDocument7 pages10 IrosRoger RozarioNo ratings yet
- Overall Funding Agenies PDFDocument45 pagesOverall Funding Agenies PDFRoger RozarioNo ratings yet
- Discrete-Time Recurrent Neural Networks With Time-Varying Delays: Exponential Stability AnalysisDocument11 pagesDiscrete-Time Recurrent Neural Networks With Time-Varying Delays: Exponential Stability AnalysisRoger RozarioNo ratings yet
- 4 CBFHDocument4 pages4 CBFHRoger RozarioNo ratings yet
- Design of An Arduino-Based Smart Car: Zhao Wang, Eng Gee Lim, Weiwei Wang, Mark Leach, Ka Lok ManDocument2 pagesDesign of An Arduino-Based Smart Car: Zhao Wang, Eng Gee Lim, Weiwei Wang, Mark Leach, Ka Lok ManRoger RozarioNo ratings yet
- Bernard Widrow: Fields of ResearchDocument2 pagesBernard Widrow: Fields of ResearchRoger RozarioNo ratings yet
- Assignment - 1 Soft Computing (Science Based Electives)Document1 pageAssignment - 1 Soft Computing (Science Based Electives)Roger RozarioNo ratings yet
- Grammar in 15 Minutes A DayDocument240 pagesGrammar in 15 Minutes A Daylalith.shankar7971100% (10)
- R 2008 M.E. Power Electronics SyllabusDocument22 pagesR 2008 M.E. Power Electronics SyllabusstandalonembaNo ratings yet
- Unit V: Power Quality MonitoringDocument3 pagesUnit V: Power Quality MonitoringRoger RozarioNo ratings yet
- PED SyllabusDocument32 pagesPED SyllabusRoger RozarioNo ratings yet
- Dynamic Matrix Controller Based On Sliding Mode CoDocument7 pagesDynamic Matrix Controller Based On Sliding Mode CoRenato Fuentealba AravenaNo ratings yet
- Deep Learning in (And Of) Agent-Based Models: A ProspectusDocument19 pagesDeep Learning in (And Of) Agent-Based Models: A ProspectusGetachew A. AbegazNo ratings yet
- Clase 0 UcursosDocument40 pagesClase 0 UcursosOlegario SosaNo ratings yet
- Modifying Gauss-Elimination For Tridiagonal Systems – C PROGRAMDocument5 pagesModifying Gauss-Elimination For Tridiagonal Systems – C PROGRAMArt ScenoNo ratings yet
- Automatic Number Plate Recognition System Using Super-Resolution TechniqueDocument5 pagesAutomatic Number Plate Recognition System Using Super-Resolution TechniqueMallarapu VasanthiNo ratings yet
- HH 3Document23 pagesHH 3hmm raniaNo ratings yet
- PHAS0025 CourseOutlineDocument3 pagesPHAS0025 CourseOutlineo cNo ratings yet
- Assignment On Matrix and Linear Algebra: Eigen Value: Sunjida HaqueDocument25 pagesAssignment On Matrix and Linear Algebra: Eigen Value: Sunjida HaqueMd. Tanvir AhmedNo ratings yet
- Predictive Analytics A Review of Trends and TechniDocument7 pagesPredictive Analytics A Review of Trends and Technisadiyalulu9No ratings yet
- DM TutoriaDocument116 pagesDM TutoriaDekpo11No ratings yet
- Rebalancing An Investment Portfolio in The Presence of Transaction CostsDocument19 pagesRebalancing An Investment Portfolio in The Presence of Transaction CostsprintmathNo ratings yet
- CHP 4 Fuzzy Inference SystemsDocument38 pagesCHP 4 Fuzzy Inference SystemsheadaidsNo ratings yet
- FYP - Thesis - 2022 (1) - MergedDocument50 pagesFYP - Thesis - 2022 (1) - MergedShahilsingh SinghNo ratings yet
- BCS303 - Artificial Intelligence - Game TheoryDocument7 pagesBCS303 - Artificial Intelligence - Game TheoryAdam ChengulaNo ratings yet
- 22k-4522 (Shozab Mehdi) Lab - 1Document4 pages22k-4522 (Shozab Mehdi) Lab - 1k224522No ratings yet
- The DES Algorithm IllustratedDocument10 pagesThe DES Algorithm IllustratedMoosa Khalid0% (1)
- Purdue PGP AI and MLDocument35 pagesPurdue PGP AI and MLalthafNo ratings yet
- Rough Set Adaptive in The Model Based of Cellular Automata and Multi-AgentsDocument7 pagesRough Set Adaptive in The Model Based of Cellular Automata and Multi-AgentsManaging Editor Journal of ComputingNo ratings yet
- Job Sequencing With The DeadlineDocument5 pagesJob Sequencing With The DeadlineAbhiNo ratings yet
- Bio-Inspired ComputingDocument9 pagesBio-Inspired Computingjoseph458No ratings yet
- Function Review Worksheet 2Document2 pagesFunction Review Worksheet 2usads88No ratings yet
- Pert & CPMDocument11 pagesPert & CPMPulkit Aggarwal100% (1)
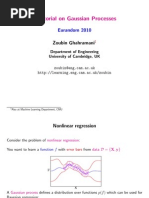
- Ghahramani Lecture2Document30 pagesGhahramani Lecture2Carlos JiménezNo ratings yet
- Statistical Machine Learning-The Basic Approach and Current Research ChallengesDocument35 pagesStatistical Machine Learning-The Basic Approach and Current Research Challengesnikhilesh kumarNo ratings yet
- EPGP in Data Science (Curriculum)Document30 pagesEPGP in Data Science (Curriculum)adadaed adNo ratings yet
- Neural Networks: Directed byDocument53 pagesNeural Networks: Directed bytaha khouzaimaaNo ratings yet
- 02 Maximal Output Admissible Set - Linear Systems With State and Control ConstraintsDocument13 pages02 Maximal Output Admissible Set - Linear Systems With State and Control ConstraintsArash MarashianNo ratings yet