Helical Gears Project
Helical Gears Project
Download as doc, pdf, or txt
You might also like
- Bevel Gear Design Project MainDocument66 pagesBevel Gear Design Project MainJACKPOT LY100% (3)
- Design and Calculation of Five Speed Manual Gear-Box (Landcruiser)Document6 pagesDesign and Calculation of Five Speed Manual Gear-Box (Landcruiser)Dr. Aung Ko LattNo ratings yet
- Report On Helical Gear DesignDocument3 pagesReport On Helical Gear Designdanish100% (1)
- Single-Stage GearboxDocument21 pagesSingle-Stage Gearboxapi-469023149No ratings yet
- Limits Fits and Tolerances SolutionDocument5 pagesLimits Fits and Tolerances SolutionHardik ParmarNo ratings yet
- Gearbox Project ReportDocument15 pagesGearbox Project ReportPARTHA PRATIM PURKAIT100% (1)
- Differential Gearbox Development PresentationDocument35 pagesDifferential Gearbox Development PresentationAreeb KhanNo ratings yet
- Dynamics Lab ManualDocument51 pagesDynamics Lab ManualRavindiran ChinnasamyNo ratings yet
- A Project Report On HMT CompanyDocument32 pagesA Project Report On HMT CompanyKaran Kumar40% (5)
- Final ReportDocument45 pagesFinal ReportKuppu Raj100% (1)
- Construction of A Constant Mesh Gear BoxDocument21 pagesConstruction of A Constant Mesh Gear BoxAmare Eshetie0% (1)
- Design of Gear Box Prepared By: Yaried Worku Muket AGMASDocument34 pagesDesign of Gear Box Prepared By: Yaried Worku Muket AGMASyared sitotaw100% (1)
- Gear Design Project IIDocument123 pagesGear Design Project IIYigremachew bizualew AyenewNo ratings yet
- Helical Gears: DefinitionDocument29 pagesHelical Gears: DefinitionMuthuvel MNo ratings yet
- Gear Box Design Project Two: Faculity of Mechanical and Industrial EngineeringDocument131 pagesGear Box Design Project Two: Faculity of Mechanical and Industrial Engineeringnigusu sisayNo ratings yet
- Gearbox Project ReportDocument11 pagesGearbox Project Reportalexpatow50% (2)
- Gearbox 210509074427Document59 pagesGearbox 210509074427mussietilahungessesseNo ratings yet
- Spur Gear MINI PROJECT FOR 2015Document92 pagesSpur Gear MINI PROJECT FOR 2015Lucky pavanNo ratings yet
- Design Project 11Document38 pagesDesign Project 11Hemanth VeeraNo ratings yet
- Scisor Jack PresentationDocument21 pagesScisor Jack Presentationgemechu mengistu100% (2)
- ME6601-Design of Transmission SystemsDocument16 pagesME6601-Design of Transmission SystemsSecret SecretNo ratings yet
- Experment On Watt and Porter GovernorDocument7 pagesExperment On Watt and Porter GovernorAgare TubeNo ratings yet
- Yared Love Gear Box DesignDocument117 pagesYared Love Gear Box DesignYigremachew bizualew AyenewNo ratings yet
- Design of Spur GearDocument67 pagesDesign of Spur GearShubham Dhurjad100% (1)
- Sliding Mesh Miki FinalDocument93 pagesSliding Mesh Miki FinalalebiegashityNo ratings yet
- Lecture 1Document41 pagesLecture 1norhaslina_aa33% (3)
- Design Against Fluctuating Loads of Helical SpringsDocument29 pagesDesign Against Fluctuating Loads of Helical SpringsVikranth Deepak100% (1)
- Gearbox Lift StandDocument72 pagesGearbox Lift StandfuadNo ratings yet
- Synchromesh Gearbox Definition Construction Working Principle Advantages Application Notes PDFDocument9 pagesSynchromesh Gearbox Definition Construction Working Principle Advantages Application Notes PDFMelanie Martinsson100% (1)
- Hydraulic PressDocument5 pagesHydraulic PressSanskrithi Sanskrithi 12No ratings yet
- Experiment No. 5: Aim: Study of Various Types of Gear BoxesDocument9 pagesExperiment No. 5: Aim: Study of Various Types of Gear BoxesSiddhesh RaulNo ratings yet
- Speed Reduction Gear Box Design PDFDocument11 pagesSpeed Reduction Gear Box Design PDFadeasdfs83% (6)
- Experiment No - 1: AIM: Study of Various Types of Gear Boxes Such As Industrial Gear Box, SynchromeshDocument3 pagesExperiment No - 1: AIM: Study of Various Types of Gear Boxes Such As Industrial Gear Box, SynchromeshParas KumbalwarNo ratings yet
- GearsDocument70 pagesGearsJayesh NayakantiNo ratings yet
- Design and Analysis of Rocker ArmDocument23 pagesDesign and Analysis of Rocker ArmAvt Shubhash25% (4)
- Design Procedure For Spur and Helical Gear PDFDocument15 pagesDesign Procedure For Spur and Helical Gear PDFBinoy K B100% (2)
- Mithilesh PPT On Gear TrainsDocument20 pagesMithilesh PPT On Gear TrainsMithilesh KumarNo ratings yet
- Dynamic Force Analysis ProblemsDocument8 pagesDynamic Force Analysis Problemsa c s KumarNo ratings yet
- Dynamics Lab Manual - ME6511Document66 pagesDynamics Lab Manual - ME6511vinothNo ratings yet
- Design of Gear BoxesDocument19 pagesDesign of Gear BoxesMuthuvel MNo ratings yet
- DYNAMICS LAB VIVA QUESTIONS FullDocument4 pagesDYNAMICS LAB VIVA QUESTIONS FullSudipta NathNo ratings yet
- Gear Cutting OperationsDocument23 pagesGear Cutting OperationsHossam Ali0% (1)
- U2 Working & AuxiliaryDocument48 pagesU2 Working & AuxiliaryNurye Nigus100% (1)
- Sliding Mesh Gearbox FullDocument4 pagesSliding Mesh Gearbox FullDarshit GadhiyaNo ratings yet
- Synchromesh Gearbox - Construction, Working Principle, Advantages, Disadvantages, and Applications (PDF)Document7 pagesSynchromesh Gearbox - Construction, Working Principle, Advantages, Disadvantages, and Applications (PDF)Kyle LabileNo ratings yet
- 1 Epicyclic Gear Train ExperimentDocument6 pages1 Epicyclic Gear Train Experimentshuyun88100% (6)
- Mechanical Stepless DrivesDocument7 pagesMechanical Stepless Driveskiran_wakchaure50% (2)
- Theoretical QuestionsDocument17 pagesTheoretical Questionsanbamech50% (2)
- Gear TrainDocument26 pagesGear TraingowthamarajNo ratings yet
- Gearbox DesignDocument94 pagesGearbox DesignHema KumarNo ratings yet
- Constant Mesh Gear BoxDocument10 pagesConstant Mesh Gear BoxSummer Nelson0% (1)
- Cam AnalysisDocument2 pagesCam AnalysisGaurav KumarNo ratings yet
- Protected Type Flange CouplingDocument4 pagesProtected Type Flange CouplingSachi Dhanandam100% (1)
- Designing of Scissor Jack in AutoCADDocument16 pagesDesigning of Scissor Jack in AutoCADOmer Abdullah100% (1)
- Theory of Machines - Lab ManualDocument28 pagesTheory of Machines - Lab ManualHoneyNo ratings yet
- Kinematics of Machines PDFDocument133 pagesKinematics of Machines PDFarjunNo ratings yet
- HMT ReportDocument50 pagesHMT Reportrakeshin100% (1)
- Industrial Training ReportDocument71 pagesIndustrial Training ReportVivek Rekhan100% (1)
- Eccentric TurningDocument57 pagesEccentric TurningNitin100% (1)
- Mit - edu/TPP 12399/car - Ja Rgon - SHTMLDocument14 pagesMit - edu/TPP 12399/car - Ja Rgon - SHTMLRavi TarunNo ratings yet
- JJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJ JJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJ JJDocument17 pagesJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJ JJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJ JJRavi TarunNo ratings yet
- DGNMMMM MMMMMMN ZZZZZZZZZZZZ ZZZZZZZZZZZZ Zzzzzzzzzzzu FLLLLLLLLLLLLLLLLLLLLLLDocument6 pagesDGNMMMM MMMMMMN ZZZZZZZZZZZZ ZZZZZZZZZZZZ Zzzzzzzzzzzu FLLLLLLLLLLLLLLLLLLLLLLRavi TarunNo ratings yet
- FFFFFFFFFFFFFFFFFF FFFFFFFFFFFFFFFFFF FBBBBBBBBB BBBBBBBBBB BBBBBBBBBB BBBBBBBBBB BBBBDocument237 pagesFFFFFFFFFFFFFFFFFF FFFFFFFFFFFFFFFFFF FBBBBBBBBB BBBBBBBBBB BBBBBBBBBB BBBBBBBBBB BBBBRavi TarunNo ratings yet
- FFFFFFFFFFFFFFFFFF FFFFFFFFFFFFFFFFFF F: GDDDDDDDD DDDDDDDDD DDDDNNNNN NNNNNNNNNDocument235 pagesFFFFFFFFFFFFFFFFFF FFFFFFFFFFFFFFFFFF F: GDDDDDDDD DDDDDDDDD DDDDNNNNN NNNNNNNNNRavi TarunNo ratings yet
- FFFFFFFFFFFFFFFFFF FFFFFFFFFFFFFFFFFF FDocument64 pagesFFFFFFFFFFFFFFFFFF FFFFFFFFFFFFFFFFFF FRavi TarunNo ratings yet
- For More Information Please Visit Our Website: WWW - Mbrdi.co - inDocument2 pagesFor More Information Please Visit Our Website: WWW - Mbrdi.co - inRavi TarunNo ratings yet
- Mit - edu/TPP 12399/car - Ja Rgon - SHTMLDocument14 pagesMit - edu/TPP 12399/car - Ja Rgon - SHTMLRavi TarunNo ratings yet
- For More Information Please Visit Our Website: WWW - Mbrdi.co - inDocument2 pagesFor More Information Please Visit Our Website: WWW - Mbrdi.co - inRavi TarunNo ratings yet
- Complex Sheet Metal Part Lower CrossmemberDocument1 pageComplex Sheet Metal Part Lower CrossmemberRavi TarunNo ratings yet
- Yyyyyyyyyyy Yyyyyyyyyyy Yyyyyyyyyyy Yyyyyyyyyyy Yyyyyyyyyyy YyyyyyyyyyyDocument13 pagesYyyyyyyyyyy Yyyyyyyyyyy Yyyyyyyyyyy Yyyyyyyyyyy Yyyyyyyyyyy YyyyyyyyyyyRavi TarunNo ratings yet
- GGGJGJTTTTTT TTTTTTTTTTTTT TTTTTTTTTTTTT TTTTTTTTTTTTT TTTTTTTTTTTTTDocument2 pagesGGGJGJTTTTTT TTTTTTTTTTTTT TTTTTTTTTTTTT TTTTTTTTTTTTT TTTTTTTTTTTTTRavi TarunNo ratings yet
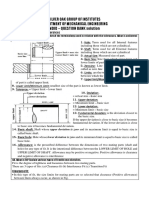
- Exit From Sketcher and Revolve The Generated Feature and Select Remove Option in Revolve Definition Box Which Looks Like A Shown in FigureDocument1 pageExit From Sketcher and Revolve The Generated Feature and Select Remove Option in Revolve Definition Box Which Looks Like A Shown in FigureRavi TarunNo ratings yet
- CGGGGGGGG GGGGGGGGM MMMMMMMM M MKKKKKK KKKKKKKKKK KKKKKKKKKKDocument10 pagesCGGGGGGGG GGGGGGGGM MMMMMMMM M MKKKKKK KKKKKKKKKK KKKKKKKKKKRavi TarunNo ratings yet
- Cylinder Head Detail 10Document2 pagesCylinder Head Detail 10Ravi TarunNo ratings yet
- Cylinder Head Detail 8Document2 pagesCylinder Head Detail 8Ravi TarunNo ratings yet
- Diesel Engines: Automotive 4-Stroke Engine Head Designs - Valve and Camshaft ConfigurationsDocument3 pagesDiesel Engines: Automotive 4-Stroke Engine Head Designs - Valve and Camshaft ConfigurationsRavi TarunNo ratings yet
- Cylinderhead Detail 2Document3 pagesCylinderhead Detail 2Ravi TarunNo ratings yet
- Cylinder Head Detail 1Document3 pagesCylinder Head Detail 1Ravi TarunNo ratings yet
- "Towerplus": A Software Programme Developed To Assist High Voltage Transmission Line DesignDocument4 pages"Towerplus": A Software Programme Developed To Assist High Voltage Transmission Line DesignAdiputra Satria100% (1)
- Manual de Partes BobcatDocument372 pagesManual de Partes Bobcatxezuz hdezNo ratings yet
- Well-Service-Brochure FINAL LODocument5 pagesWell-Service-Brochure FINAL LOArgenis JimenezNo ratings yet
- 11 - More Electric AircraftDocument7 pages11 - More Electric AircraftAmar JabarNo ratings yet
- Gr300e100202 Ex10Document12 pagesGr300e100202 Ex10anggieNo ratings yet
- SASTRA University-B.tech Mechatronics Syllabus SheetDocument106 pagesSASTRA University-B.tech Mechatronics Syllabus SheetSrikant Gadicherla100% (1)
- FC 4.1.15 - Vibrator Soil Compactor Checklist FormDocument2 pagesFC 4.1.15 - Vibrator Soil Compactor Checklist FormSubzone ThreeNo ratings yet
- Efficient Motor Control With Power Drives SystemsDocument66 pagesEfficient Motor Control With Power Drives SystemsVic Rizenn Isidore BobilesNo ratings yet
- Pplant Lec 2Document6 pagesPplant Lec 2Alyssa SisonNo ratings yet
- Nissan Almera 1995-2000 GIDocument48 pagesNissan Almera 1995-2000 GIHarePistaNo ratings yet
- Installation and Operating Manual: Engine Air StartersDocument17 pagesInstallation and Operating Manual: Engine Air StartersMauricio Ariel H. OrellanaNo ratings yet
- We 315Document4 pagesWe 315jacklyn ade putra100% (1)
- Rough Terrian Crane src750Document11 pagesRough Terrian Crane src750Prieta Aghi Meilia0% (1)
- AMG-GT C190 Katalog 1215 02 ENG eMB PDFDocument68 pagesAMG-GT C190 Katalog 1215 02 ENG eMB PDFSculator100% (1)
- Kunal PPT Jumbo DrillDocument37 pagesKunal PPT Jumbo DrillAmit KashyapNo ratings yet
- Parking Brake - Test: Testing and AdjustingDocument3 pagesParking Brake - Test: Testing and AdjustingRajan MullappillyNo ratings yet
- Tata Ultra T 7 Electric BrochureDocument2 pagesTata Ultra T 7 Electric BrochuregopinadhNo ratings yet
- Cat 772g BRDocument28 pagesCat 772g BR111No ratings yet
- TRSM 1500 0413 Heavy Duty Trans RTO16915Document256 pagesTRSM 1500 0413 Heavy Duty Trans RTO16915Freddy Orellana100% (1)
- C & D Series Backhoe Loader Diagnostics: Service TrainingDocument25 pagesC & D Series Backhoe Loader Diagnostics: Service TrainingFaustoNo ratings yet
- Mechanical Engineering Automobile EngineeringDocument20 pagesMechanical Engineering Automobile EngineeringNilesh patilNo ratings yet
- Characteristics of Chain DrivesDocument4 pagesCharacteristics of Chain DrivesOwa RoperezNo ratings yet
- GSX1400 Manual Section 1 General InformationDocument10 pagesGSX1400 Manual Section 1 General InformationDeaferrantNo ratings yet
- Case IH Steiger Complete - Brochure - 1712Document44 pagesCase IH Steiger Complete - Brochure - 1712JosipNo ratings yet
- 2005 Dyna Super Glide Custom - Owner's ManualDocument146 pages2005 Dyna Super Glide Custom - Owner's Manualroberto gonzalezNo ratings yet
- lh514 Specification Sheet English PDFDocument16 pageslh514 Specification Sheet English PDFV SilvaNo ratings yet
- Abcdefghi Lmnopq Stuvw Z JK R XY: Acronyms and AbbreviationsDocument15 pagesAbcdefghi Lmnopq Stuvw Z JK R XY: Acronyms and AbbreviationsReverson SantosNo ratings yet
- Alfa Laval GJ4 ManualDocument68 pagesAlfa Laval GJ4 ManualLiu YangtzeNo ratings yet
- GearsDocument14 pagesGearsZulhilmi Chik TakNo ratings yet
- 6HP19 21Document31 pages6HP19 21dannn12No ratings yet