0% found this document useful (0 votes)
54 viewsMonitoring and Control of Single Phase Induction Motor: Power Supply
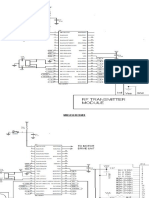
The document describes the components and operation of an online monitoring and control system for a single phase induction motor. It includes sensors to measure voltage, current, and speed which send data to a PIC microcontroller. The microcontroller processes the data and displays it on an LCD. It can also transmit the data wirelessly using Zigbee protocol to a remote computer where a user can set reference values to control the motor parameters. Key components include a power supply, microcontroller, communication system, driver circuit, and sensors.
Uploaded by
dineshkumarCopyright
© © All Rights Reserved
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
54 viewsMonitoring and Control of Single Phase Induction Motor: Power Supply
The document describes the components and operation of an online monitoring and control system for a single phase induction motor. It includes sensors to measure voltage, current, and speed which send data to a PIC microcontroller. The microcontroller processes the data and displays it on an LCD. It can also transmit the data wirelessly using Zigbee protocol to a remote computer where a user can set reference values to control the motor parameters. Key components include a power supply, microcontroller, communication system, driver circuit, and sensors.
Uploaded by
dineshkumarCopyright
© © All Rights Reserved
Available Formats
Download as DOCX, PDF, TXT or read online on Scribd
/ 16