Pid Tuning Operator
Pid Tuning Operator
Download as pdf or txt
You might also like
- Manual de Partes Motores Mtu PDFDocument179 pagesManual de Partes Motores Mtu PDFJorge Eraldo Albarran Poleo33% (3)
- CB3DSEFJ - DesignStudio - T24ExtensibilityForJava Day 2Document45 pagesCB3DSEFJ - DesignStudio - T24ExtensibilityForJava Day 2cesar100% (5)
- Exp - P9 - Pressure ControlDocument9 pagesExp - P9 - Pressure ControlPriyanshu LilhaNo ratings yet
- Chapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGDocument5 pagesChapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGLakshmiNo ratings yet
- Acfrogdgl836ldvbuspou Eyl6uhjugculhmtzdojwbgtlkkup E7yn7z3wkk04xjugsulhx0ouzu9rws3smog3t9o06r7-Cs1zavkubqcfvimg43ogdym21jddxoevtgcy ZznougjhwjcxkhnDocument40 pagesAcfrogdgl836ldvbuspou Eyl6uhjugculhmtzdojwbgtlkkup E7yn7z3wkk04xjugsulhx0ouzu9rws3smog3t9o06r7-Cs1zavkubqcfvimg43ogdym21jddxoevtgcy ZznougjhwjcxkhnMOHAMED THARIKNo ratings yet
- ExercisesDocument18 pagesExercisescetec1234No ratings yet
- Design and Tuning of Fuzzy Logic PID ControllerDocument19 pagesDesign and Tuning of Fuzzy Logic PID ControllerPriya BhardwajNo ratings yet
- Controller TuningDocument17 pagesController TuningtrshaaaNo ratings yet
- Mesb333 Pid ControlDocument13 pagesMesb333 Pid ControlMohd KhairiNo ratings yet
- Pid Control TheoryDocument8 pagesPid Control TheorySonu SinghNo ratings yet
- 1 - 1 - IntroducaoDocument31 pages1 - 1 - IntroducaoAndré GomesNo ratings yet
- Process Control SystemsDocument3 pagesProcess Control SystemsHammad Ansari100% (1)
- Report ControlDocument33 pagesReport Controlajwadalfatani100% (5)
- PID Controller Design, Tuning and TroubleshootingDocument27 pagesPID Controller Design, Tuning and TroubleshootingMbaliReituNo ratings yet
- Finn Haugen. Telemark University College National Instruments ConfidentialDocument27 pagesFinn Haugen. Telemark University College National Instruments ConfidentialtriplbingaziNo ratings yet
- Lab 6 Engineering Measurement and Lab SampleDocument11 pagesLab 6 Engineering Measurement and Lab Sampletk_atiqahNo ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- Exp - P6 - Temperature ControlDocument10 pagesExp - P6 - Temperature ControlSiddesh PatilNo ratings yet
- Temperature Control LabDocument16 pagesTemperature Control Labhoocheeleong234100% (1)
- PID ControllersDocument9 pagesPID Controllerszs94qjqcx7No ratings yet
- Instruction Manual: Pid Based Pressure Loop TrainerDocument28 pagesInstruction Manual: Pid Based Pressure Loop TrainerKiran BennyNo ratings yet
- Pci Lab Manual (2) StudentDocument67 pagesPci Lab Manual (2) StudentTewodros AsfawNo ratings yet
- Industrial Process Control Basic ConceptsDocument39 pagesIndustrial Process Control Basic Conceptskaezzar10100% (2)
- Pid Tuning ClassicalDocument18 pagesPid Tuning ClassicalVo Quang HuyNo ratings yet
- Feedback Controller TuningDocument23 pagesFeedback Controller Tuningso cool100% (1)
- WINSEM2023-24 BEIE303L TH VL2023240502899 2024-02-02 Reference-Material-IDocument56 pagesWINSEM2023-24 BEIE303L TH VL2023240502899 2024-02-02 Reference-Material-IAffan AhmmedNo ratings yet
- Tuning PID ControllersDocument3 pagesTuning PID ControllersSatsih KumarNo ratings yet
- PID Furnace Temp ControlDocument11 pagesPID Furnace Temp ControlashishNo ratings yet
- PID Theory From WikipediaDocument7 pagesPID Theory From Wikipediaputra-tzuNo ratings yet
- PID Theory Explained, Komplett PDFDocument5 pagesPID Theory Explained, Komplett PDFThierry BaudorreNo ratings yet
- A Design of A PID Self-Tuning Controller Using Labview: Mohammad A. K. Alia, Tariq M. Younes, Shebel A. AlsabbahDocument11 pagesA Design of A PID Self-Tuning Controller Using Labview: Mohammad A. K. Alia, Tariq M. Younes, Shebel A. AlsabbahEdgar Maya PerezNo ratings yet
- Development of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringDocument23 pagesDevelopment of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringHakan AykuluNo ratings yet
- PIDTuningClassical - ControlsWikiDocument14 pagesPIDTuningClassical - ControlsWikiAbolhasanNo ratings yet
- Ziegler - Nichols Pid TuningDocument2 pagesZiegler - Nichols Pid TuningTrần Ngọc MẩnNo ratings yet
- Pid Control and Communication in Siemens PLCDocument50 pagesPid Control and Communication in Siemens PLCCesar BarrosNo ratings yet
- PID in Siemens PLCDocument50 pagesPID in Siemens PLCabdulahadkhan165No ratings yet
- EngM513 LAB Manual Automatic Control EngineeringDocument23 pagesEngM513 LAB Manual Automatic Control Engineeringlacika04No ratings yet
- Second ChapterDocument17 pagesSecond ChaptersebihiachwakNo ratings yet
- PID Tuning ClassicalDocument10 pagesPID Tuning ClassicalTolga DurudoganNo ratings yet
- Embedded Systems and Control Systems': An Open-Loop ControllerDocument5 pagesEmbedded Systems and Control Systems': An Open-Loop Controllermohed_kamalNo ratings yet
- Features of Practical PID ControllersDocument8 pagesFeatures of Practical PID ControllersGeorge MarkasNo ratings yet
- Ipc PPT 7thDocument25 pagesIpc PPT 7thChemical engrNo ratings yet
- Module 10 - Loop TuningDocument41 pagesModule 10 - Loop TuningHtet LwinNo ratings yet
- PID ControllersDocument6 pagesPID ControllersNguyễn HảiNo ratings yet
- LTCSDKDocument8 pagesLTCSDKhoquangloi789No ratings yet
- PIDTuningClassical - ControlsWikiDocument14 pagesPIDTuningClassical - ControlsWikiksameer_coepNo ratings yet
- Control Lab Project ReportDocument28 pagesControl Lab Project ReportDanyal QamarNo ratings yet
- PID Controller Working Principle Explained For BeginnersDocument6 pagesPID Controller Working Principle Explained For BeginnersPramillaNo ratings yet
- Objectives 2Document17 pagesObjectives 2Shaikhan NadzemiNo ratings yet
- Process Reaction CurveDocument6 pagesProcess Reaction Curveindra100% (1)
- Temperature ControlDocument7 pagesTemperature ControlDina099No ratings yet
- Pid PDFDocument22 pagesPid PDFmansoorNo ratings yet
- NI Tutorial 3782 enDocument4 pagesNI Tutorial 3782 enhiperboreoatlantecNo ratings yet
- Experiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerDocument16 pagesExperiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerfahadfiazNo ratings yet
- A Design of A PID Self-Tuning Controller Using PDFDocument11 pagesA Design of A PID Self-Tuning Controller Using PDFDaniel SanchezNo ratings yet
- NI Tutorial 3782 enDocument4 pagesNI Tutorial 3782 enpetergoodingNo ratings yet
- CH 8Document81 pagesCH 8kfaliNo ratings yet
- Lecture2 3Document25 pagesLecture2 3vrushalibhattNo ratings yet
- ZzizigranatiDocument1 pageZzizigranatikarmoweldingNo ratings yet
- CFTC SetDocument26 pagesCFTC SetkarmoweldingNo ratings yet
- Piping SystemsDocument6 pagesPiping SystemsThomas LiewNo ratings yet
- Durbin WatsonDocument25 pagesDurbin WatsonkarmoweldingNo ratings yet
- MATLab Tutorial #3Document19 pagesMATLab Tutorial #3karmoweldingNo ratings yet
- 1234 Forex SystemDocument3 pages1234 Forex SystemkarmoweldingNo ratings yet
- Interactive Cares Laravel Career Path Outline 1Document15 pagesInteractive Cares Laravel Career Path Outline 1Neamotullah NaimNo ratings yet
- ISTQB Dumps and Mock Tests For Foundation Level Paper 16 PDFDocument7 pagesISTQB Dumps and Mock Tests For Foundation Level Paper 16 PDFJohn SmithNo ratings yet
- A Novel Prioritized Deciding Factor (PDF) Approach For Directed Acyclic Graph (DAG) Based Test Case Prioritization Using Agile Testing MethodologyDocument8 pagesA Novel Prioritized Deciding Factor (PDF) Approach For Directed Acyclic Graph (DAG) Based Test Case Prioritization Using Agile Testing MethodologyiirNo ratings yet
- Anexo Ii - Licenciamento de Software SapDocument2 pagesAnexo Ii - Licenciamento de Software Sapmademoiselle Lilya LilyaNo ratings yet
- Lecture 4 Chapter - 4Document29 pagesLecture 4 Chapter - 4Sai Karthik BaggamNo ratings yet
- Report in System IntegrationDocument22 pagesReport in System IntegrationRitchie Dela Cruz PepitoNo ratings yet
- FHWA TrafficControlSystemsHandbook 10-2005-FINALDocument368 pagesFHWA TrafficControlSystemsHandbook 10-2005-FINALcipliliNo ratings yet
- Failure Analysis Methods What, Why and HowDocument26 pagesFailure Analysis Methods What, Why and Howjwpaprk1100% (1)
- Jntuh College of Engineering Hyderabad Dept of Computer Science and EngineeringDocument4 pagesJntuh College of Engineering Hyderabad Dept of Computer Science and EngineeringsidNo ratings yet
- Puppet CourseDocument2 pagesPuppet CourseMadhanNo ratings yet
- NHA2414 Lecture 1-1 Module IntroductionDocument18 pagesNHA2414 Lecture 1-1 Module Introductionpriom ahmedNo ratings yet
- Act05 Bsme33 Ca23Document3 pagesAct05 Bsme33 Ca23Lagajino Rolando Jr. A.No ratings yet
- Object-Oriented Programming in Action Script 3.0Document50 pagesObject-Oriented Programming in Action Script 3.0dfmNo ratings yet
- Is 217 - Deployment Maintenance & ServicesDocument18 pagesIs 217 - Deployment Maintenance & ServicesAllan IgbuhayNo ratings yet
- Kajal ProjectDocument46 pagesKajal ProjectRohan SinghNo ratings yet
- NO.1 A. B. C. D.: AnswerDocument7 pagesNO.1 A. B. C. D.: Answers-tinyNo ratings yet
- CIS2303 - Project Details and Rubric - 202310Document11 pagesCIS2303 - Project Details and Rubric - 202310omaralmutawa1No ratings yet
- Object Oriented Programming in C++Document130 pagesObject Oriented Programming in C++oussama amaraNo ratings yet
- Asset-V1 TUMx+QPLS3x+2T2018a+type@asset+block@QPLS3X 1-4 MuraMuriMuda Woolfrey Part2 PDFDocument8 pagesAsset-V1 TUMx+QPLS3x+2T2018a+type@asset+block@QPLS3X 1-4 MuraMuriMuda Woolfrey Part2 PDFChristianNo ratings yet
- 11 12 106removing and Installing Right Cylinder Head (N62 From 9-03 and N62TU)Document8 pages11 12 106removing and Installing Right Cylinder Head (N62 From 9-03 and N62TU)abdull rehmanNo ratings yet
- Analisis Keandalan Dan Ketersediaan Komponen Lokomotif Diesel Elektrik Dengan Pendekatan RCM IiDocument6 pagesAnalisis Keandalan Dan Ketersediaan Komponen Lokomotif Diesel Elektrik Dengan Pendekatan RCM IiTata OdoyNo ratings yet
- Web101 1 2Document12 pagesWeb101 1 2trishabanania5No ratings yet
- Week 13 Activity PDFDocument13 pagesWeek 13 Activity PDFkashinath.kbNo ratings yet
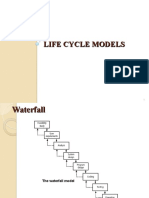
- The Spiral ModelDocument5 pagesThe Spiral ModelMary Ann RebloraNo ratings yet
- Software Engineering: Unit-2Document41 pagesSoftware Engineering: Unit-2Rameswar ReddyNo ratings yet
- WWW - Aka.ms/pathways: Getting Started Role Based Certification Doing More Going Further.. and FurtherDocument1 pageWWW - Aka.ms/pathways: Getting Started Role Based Certification Doing More Going Further.. and FurtherMarwan Saad100% (1)
- KL 002.11.6 en Unit2 v1.0.6Document91 pagesKL 002.11.6 en Unit2 v1.0.6LuizCannalongaNo ratings yet