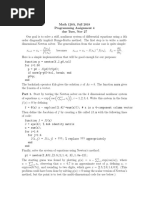
Assn2 PDF
Assn2 PDF
Download as pdf or txt
You might also like
- Problem Set #1. Due Sept. 9 2020.: MAE 501 - Fall 2020. Luc Deike, Anastasia Bizyaeva, Jiarong Wu September 2, 2020Document3 pagesProblem Set #1. Due Sept. 9 2020.: MAE 501 - Fall 2020. Luc Deike, Anastasia Bizyaeva, Jiarong Wu September 2, 2020Francisco SáenzNo ratings yet
- MATH3161/MATH5165 Optimization: The University of New South Wales School of Mathematics and StatisticsDocument4 pagesMATH3161/MATH5165 Optimization: The University of New South Wales School of Mathematics and StatisticsBobNo ratings yet
- Robust Control SystemDocument40 pagesRobust Control Systemtejal daveNo ratings yet
- Assn 2Document3 pagesAssn 2●●●●●●●1No ratings yet
- Solutions For Exercises in Mobile Robotics Mathematics by KellyDocument7 pagesSolutions For Exercises in Mobile Robotics Mathematics by KellyalvinbookfinderNo ratings yet
- Optimal Control and Decision Making: EexamDocument18 pagesOptimal Control and Decision Making: EexamAshwin MahoneyNo ratings yet
- Chapter 2: Quadratic ProgrammingDocument16 pagesChapter 2: Quadratic ProgrammingcartamenesNo ratings yet
- Tutorial 01Document4 pagesTutorial 01Anne Shanone Chloe LIM KINNo ratings yet
- Chandana Monica CGMethodDocument28 pagesChandana Monica CGMethodlavyapadhiyar97No ratings yet
- Solving Optimal Control Problems With MATLABDocument21 pagesSolving Optimal Control Problems With MATLABxarthrNo ratings yet
- Example 1: 4.1: Introduction To Exponential FunctionDocument18 pagesExample 1: 4.1: Introduction To Exponential FunctionKoay Chuah Hui YingNo ratings yet
- Project 1Document9 pagesProject 1likpataNo ratings yet
- Concordia University Machine Learning Assaignment with solutionsDocument8 pagesConcordia University Machine Learning Assaignment with solutionsabdurrafiqitNo ratings yet
- 14 - Fuzzy Pid Self TunningDocument6 pages14 - Fuzzy Pid Self TunningMayer FernandesNo ratings yet
- IE684 Lab03Document6 pagesIE684 Lab03Tirthankar AdhikariNo ratings yet
- Regression and Interpolation Lec. 6.1: Introduction: Dr. Niket Kaisare Department of Chemical Engineering IIT-MadrasDocument12 pagesRegression and Interpolation Lec. 6.1: Introduction: Dr. Niket Kaisare Department of Chemical Engineering IIT-MadrasGrantMwakipundaNo ratings yet
- Mpc12 ExamDocument8 pagesMpc12 Examamir12345678No ratings yet
- Automated Reasoning and Its Applications: John Harrison Intel CorporationDocument35 pagesAutomated Reasoning and Its Applications: John Harrison Intel CorporationSushma B SNo ratings yet
- Problem Set 5: Problem 1: Steady Heat Equation Over A 1D Fin With A Finite Volume MethodDocument5 pagesProblem Set 5: Problem 1: Steady Heat Equation Over A 1D Fin With A Finite Volume MethodAman JalanNo ratings yet
- C4Document20 pagesC4Joseph LeeNo ratings yet
- MA261 2020 PaperDocument3 pagesMA261 2020 PaperMac PearceNo ratings yet
- Indian Institute of Technology, Bombay Chemical Engineering Cl603, Optimization Endsem, 27 April 2018Document3 pagesIndian Institute of Technology, Bombay Chemical Engineering Cl603, Optimization Endsem, 27 April 2018Lakshay ChhajerNo ratings yet
- CHAPTER 2 - Lesson 3Document19 pagesCHAPTER 2 - Lesson 3Meljoy TenorioNo ratings yet
- Assignment 3Document3 pagesAssignment 3Cricket FeverNo ratings yet
- UT Dallas Syllabus For cs3341.501 05f Taught by Pankaj Choudhary (pkc022000)Document3 pagesUT Dallas Syllabus For cs3341.501 05f Taught by Pankaj Choudhary (pkc022000)UT Dallas Provost's Technology GroupNo ratings yet
- Homework 3Document3 pagesHomework 3Kush ParmeshwarNo ratings yet
- MATH3161/MATH5165 Optimization: The University of New South Wales School of JviathematicsDocument4 pagesMATH3161/MATH5165 Optimization: The University of New South Wales School of JviathematicsWayne YangNo ratings yet
- Assignment2_AIML (4)Document2 pagesAssignment2_AIML (4)Saumya Ranjan SahuNo ratings yet
- Article Title 1Document12 pagesArticle Title 1alipirkhedriNo ratings yet
- Access Solution Manual for Calculus of a Single Variable Hybrid Early Transcendental Functions 6th Edition by Larson and HEdwards ISBN 1285777050 9781285777054 All Chapters Immediate PDF DownloadDocument40 pagesAccess Solution Manual for Calculus of a Single Variable Hybrid Early Transcendental Functions 6th Edition by Larson and HEdwards ISBN 1285777050 9781285777054 All Chapters Immediate PDF Downloadsellezealsz7100% (4)
- Chap 3Document24 pagesChap 3Jhonrick MagtibayNo ratings yet
- General Instructions: Pie Matlab Assessment For Chemical EngineersDocument6 pagesGeneral Instructions: Pie Matlab Assessment For Chemical EngineersJulia RodriguezNo ratings yet
- 1 5134167750603702289 PDFDocument14 pages1 5134167750603702289 PDFJULIO MARTINEZNo ratings yet
- Prog 4Document3 pagesProg 4Kayana Dixon DeniseNo ratings yet
- EBES 2041: Engineering Mathematics 3Document5 pagesEBES 2041: Engineering Mathematics 3Tush HadNo ratings yet
- PINNs_CKadapa_1733587839Document20 pagesPINNs_CKadapa_1733587839messa.gianandreaNo ratings yet
- MM Reference 03 Mathematical Model HCDocument9 pagesMM Reference 03 Mathematical Model HCalisantosodarrian14No ratings yet
- 4-6 Remediation WorksheetsDocument10 pages4-6 Remediation WorksheetsMary Joy LugaNo ratings yet
- Tutorial Week11Document3 pagesTutorial Week11Swapnil PatilNo ratings yet
- Na August 2018Document3 pagesNa August 2018Djaafer MezhoudNo ratings yet
- Ict 4052 Nnfl-Mkp-Part BDocument2 pagesIct 4052 Nnfl-Mkp-Part BShanNo ratings yet
- FDMcodeDocument9 pagesFDMcodekartikdwnNo ratings yet
- Httpsinst Fs Dub Prod - Inscloudgate.netfiles101dc610 c726 4027 8af1 Ba3be536c427homework 2DBI00.Pdfdownload 1&token EyJ0eXDocument15 pagesHttpsinst Fs Dub Prod - Inscloudgate.netfiles101dc610 c726 4027 8af1 Ba3be536c427homework 2DBI00.Pdfdownload 1&token EyJ0eXnbt599gntwNo ratings yet
- ELEC3846 Numerical Methods and Optimization: Bachelor of Engineering Department of Electrical & Electronic EngineeringDocument5 pagesELEC3846 Numerical Methods and Optimization: Bachelor of Engineering Department of Electrical & Electronic EngineeringLouisWong100% (1)
- (Chapter 4) Exponential & Logarithmic FunctionDocument20 pages(Chapter 4) Exponential & Logarithmic FunctiondenixngNo ratings yet
- EECS 16B Summer 2020 Midterm 2 (Form 1) : InstructionsDocument16 pagesEECS 16B Summer 2020 Midterm 2 (Form 1) : InstructionsJohn CrankstonNo ratings yet
- HW02 - KNN DTDocument3 pagesHW02 - KNN DTghukasyans033No ratings yet
- Nef 2023 TutorialDocument9 pagesNef 2023 TutorialMd Sahin SirajNo ratings yet
- HW 06Document2 pagesHW 06Alexander BennettNo ratings yet
- Week6 Assignment SolutionsDocument14 pagesWeek6 Assignment Solutionsvicky.sajnaniNo ratings yet
- Existence of Multiple Limit Cycles On A Predator-Prey With Generalized Nonmonotonic Functional ResponseDocument12 pagesExistence of Multiple Limit Cycles On A Predator-Prey With Generalized Nonmonotonic Functional ResponseEmilioTSNo ratings yet
- CO25Document7 pagesCO25Archie BrownNo ratings yet
- Problem 5Document2 pagesProblem 5Djaafer MezhoudNo ratings yet
- Advanced Process OperationsDocument30 pagesAdvanced Process OperationsSaxon StanleyNo ratings yet
- Series 1Document2 pagesSeries 1Sangwoo KimNo ratings yet
- HomeworkDocument8 pagesHomeworkArtianaNo ratings yet
- ProjetDocument22 pagesProjetNadia ZoubirNo ratings yet
- Student Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionFrom EverandStudent Solutions Manual to Accompany Economic Dynamics in Discrete Time, second editionRating: 4.5 out of 5 stars4.5/5 (2)
- Advanced Numerical and Semi-Analytical Methods for Differential EquationsFrom EverandAdvanced Numerical and Semi-Analytical Methods for Differential EquationsNo ratings yet
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Operation Research MB 301Document5 pagesOperation Research MB 301grovergaurav13No ratings yet
- 208 SyllabusDocument4 pages208 SyllabusMaman GocekNo ratings yet
- Chapter-2 - Uderstanding and Modeling Organizational Systems HandoutDocument10 pagesChapter-2 - Uderstanding and Modeling Organizational Systems HandoutAshique RasoolNo ratings yet
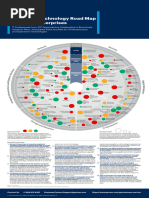
- Le-Emerging-Tech-Roadmap-2021-2023 - Hoja de Ruta de Tecnologías Emergentes en Grandes Empresas 2021-2023Document1 pageLe-Emerging-Tech-Roadmap-2021-2023 - Hoja de Ruta de Tecnologías Emergentes en Grandes Empresas 2021-2023Laura SastoqueNo ratings yet
- Walden UniversityDocument148 pagesWalden UniversityAbNo ratings yet
- Types of System TestingDocument10 pagesTypes of System TestingPatrick SerandonNo ratings yet
- Course DIT822: Software Engineering For AI SystemsDocument34 pagesCourse DIT822: Software Engineering For AI SystemsThelazyJoe TMNo ratings yet
- ISTQB Foundation BookDocument111 pagesISTQB Foundation Bookjainrobin100% (5)
- List of Documents ISO 9001 Documentation Toolkit enDocument2 pagesList of Documents ISO 9001 Documentation Toolkit enocom706No ratings yet
- Architecture: Simple Neural Nets For Pattern ClassificationDocument15 pagesArchitecture: Simple Neural Nets For Pattern ClassificationyayayehNo ratings yet
- SRS FormatDocument8 pagesSRS FormatAgam SinghNo ratings yet
- ITQSB Sample Paper 1Document7 pagesITQSB Sample Paper 1razorsbkNo ratings yet
- Thermo LQ2-0304Document1 pageThermo LQ2-0304Su-ho HanNo ratings yet
- Social Dynamics and Broadcast Media Contents in NigeriaDocument18 pagesSocial Dynamics and Broadcast Media Contents in NigeriaUbong Andem Obong100% (1)
- Thermodynamics NotesDocument16 pagesThermodynamics Notesmuneerahmed7130100% (1)
- Final ReportDocument28 pagesFinal ReportAditya PrajapatiNo ratings yet
- Iatf 16949Document63 pagesIatf 16949Narayan FukeNo ratings yet
- Database QuestionsDocument59 pagesDatabase QuestionsAashutosh SinhaNo ratings yet
- 1.2. E01 TSW 1.2.Document4 pages1.2. E01 TSW 1.2.CarmenNo ratings yet
- Tushar (Project)Document30 pagesTushar (Project)Tushar SharmaNo ratings yet
- Me - New Curriculum Professional SubjectsDocument6 pagesMe - New Curriculum Professional Subjectsgelly bilsNo ratings yet
- Shiva Kumar Data Science ResumeDocument2 pagesShiva Kumar Data Science Resumesenashiva030629No ratings yet
- IB ESS Topic 1.3 NotesDocument5 pagesIB ESS Topic 1.3 NotesZiwei DongNo ratings yet
- SE-21BCA2T341-Unit 1-NotesDocument36 pagesSE-21BCA2T341-Unit 1-NotesGAURI SANTHOSHNo ratings yet
- Design of A Lateral Motion Controller For A Small Unmanned Aerial Vehicle (SUAV)Document6 pagesDesign of A Lateral Motion Controller For A Small Unmanned Aerial Vehicle (SUAV)Adrian DincaNo ratings yet
- Procedure: Introduction To SIMULINK AM Modulation and DemodulationDocument15 pagesProcedure: Introduction To SIMULINK AM Modulation and DemodulationAndrew JonesNo ratings yet
- Definition of A System: Information Systems and AuditDocument5 pagesDefinition of A System: Information Systems and AuditSidd KadaNo ratings yet
- Release ManagementDocument4 pagesRelease ManagementMasood MughalNo ratings yet
- Life Cycle Agile Maturity Assessment Template Excel Life Cycle Agile Maturity Assessment Excel Template FreeDocument7 pagesLife Cycle Agile Maturity Assessment Template Excel Life Cycle Agile Maturity Assessment Excel Template FreehasanNo ratings yet