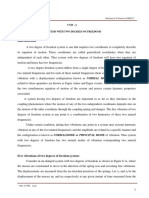
Two-Degrees-of-Freedom Systems: Modes
Two-Degrees-of-Freedom Systems: Modes
Download as docx, pdf, or txt
You might also like
- CyberOps Skills AssessmentDocument4 pagesCyberOps Skills AssessmentCarlos Pinto38% (8)
- Gym ManagementDocument50 pagesGym ManagementAvdhesh Kumar100% (8)
- Cisco IOS Voice Troubleshooting and Monitoring - MGCP Testing CommandsDocument10 pagesCisco IOS Voice Troubleshooting and Monitoring - MGCP Testing Commandscrepusculo89No ratings yet
- 052 DOFand MdofDocument42 pages052 DOFand MdofAbdelhay ElomariNo ratings yet
- 2DOF Systems PDFDocument41 pages2DOF Systems PDFManavNo ratings yet
- Solutions Mode ShapesDocument3 pagesSolutions Mode Shapesjimawsd569No ratings yet
- Chapter - 12 - Vibration of Two Degree of Freedom SystemDocument23 pagesChapter - 12 - Vibration of Two Degree of Freedom SystemArsalan IdreesNo ratings yet
- LESSON On Sample On Determination of Eigen Values-Mode Shape Using FREE Vibration AnalDocument13 pagesLESSON On Sample On Determination of Eigen Values-Mode Shape Using FREE Vibration Analharu oharuNo ratings yet
- Multi-Degree-Of-Freedom SystemsDocument5 pagesMulti-Degree-Of-Freedom SystemsmohanjatinderNo ratings yet
- Clase 10 Calculo Numerico IDocument28 pagesClase 10 Calculo Numerico IenriqueNo ratings yet
- Chapter 2 Single Degree of Freedom SystemDocument80 pagesChapter 2 Single Degree of Freedom SystemAbyot yassabNo ratings yet
- Lab #2 - Two Degrees-of-Freedom OscillatorDocument14 pagesLab #2 - Two Degrees-of-Freedom OscillatorkajariNo ratings yet
- Molecular SpectraDocument13 pagesMolecular Spectra220333No ratings yet
- Dynamics of Structures - MDOFDocument9 pagesDynamics of Structures - MDOFTony CNo ratings yet
- SHM - 2024 1Document45 pagesSHM - 2024 1Paryul ChaudhariNo ratings yet
- 2 DOF NotesDocument35 pages2 DOF Noteslebron jamesNo ratings yet
- Handouts - Lecture 10Document15 pagesHandouts - Lecture 10Avin SharmaNo ratings yet
- Systems With Translational and Rotational DisplacementsDocument9 pagesSystems With Translational and Rotational DisplacementsPrakash DuraisamyNo ratings yet
- ps1Document2 pagesps1vuhl05No ratings yet
- Homework4 PDFDocument3 pagesHomework4 PDFImron FachrurozyNo ratings yet
- Frequency of Free Damped Vibrations (Viscous Damping)Document8 pagesFrequency of Free Damped Vibrations (Viscous Damping)ذوالفقار علي حسينNo ratings yet
- Ch5 - Response of MDOF Systems PDFDocument37 pagesCh5 - Response of MDOF Systems PDFRicky AriyantoNo ratings yet
- Unit - 6 Vibrations of Two Degree of Freedom SystemsDocument28 pagesUnit - 6 Vibrations of Two Degree of Freedom SystemsGURUPRASAD KADAGADNo ratings yet
- Fundamental of VibrationDocument17 pagesFundamental of VibrationMohammad Al BastakiNo ratings yet
- Hdout Chap 5 5210 PDFDocument87 pagesHdout Chap 5 5210 PDFJohn Joshua ProtacioNo ratings yet
- Chapter 4 Multiple Degree of Freedom SystemsDocument89 pagesChapter 4 Multiple Degree of Freedom SystemsTom LaNo ratings yet
- Solution Manual For Physical Chemistry Quantum Chemistry and Molecular Interactions 1st Edition Andrew Cooksy 0321814169Document29 pagesSolution Manual For Physical Chemistry Quantum Chemistry and Molecular Interactions 1st Edition Andrew Cooksy 0321814169stanleybauerrozgfimtbe100% (41)
- Lecture 4Document16 pagesLecture 4Fong Wei JunNo ratings yet
- Chapter 4 Multiple Degree of Freedom SystemsDocument177 pagesChapter 4 Multiple Degree of Freedom Systemsmenna ahmed ebrahemNo ratings yet
- Inno2018 - EMT2502 - VIBRATIONS - Natural Freq and Modes PDFDocument8 pagesInno2018 - EMT2502 - VIBRATIONS - Natural Freq and Modes PDFinnoodiraNo ratings yet
- Inno2018 EMT2502 VIBRATIONS Natural Freq and ModesDocument8 pagesInno2018 EMT2502 VIBRATIONS Natural Freq and ModesinnoodiraNo ratings yet
- MA412 Q&A Part 4Document53 pagesMA412 Q&A Part 4Ahmad Zen FiraNo ratings yet
- Lecture3 2dofDocument86 pagesLecture3 2dofSIMRESH PRODUCTIONNo ratings yet
- Unit 4 Two DOF Systems - Part 2Document12 pagesUnit 4 Two DOF Systems - Part 2efgh21177No ratings yet
- 06 Ex Linear SystemsDocument8 pages06 Ex Linear Systemsraafet slimenNo ratings yet
- Stability of Delays SystemsDocument41 pagesStability of Delays SystemsVikranth VeeraNo ratings yet
- Chapter-Vi Multi Degree of Freedom SystemsDocument37 pagesChapter-Vi Multi Degree of Freedom SystemsAHMEDNo ratings yet
- Vibration - 3: Sam Noble (IIST) April 12, 2019 1 / 15Document21 pagesVibration - 3: Sam Noble (IIST) April 12, 2019 1 / 15VishakMuralidharanNo ratings yet
- Advanced Mechanical Vibrations-2Document114 pagesAdvanced Mechanical Vibrations-2Abdullah AwanNo ratings yet
- Two Degree of Freedom SystemDocument42 pagesTwo Degree of Freedom Systemmohanrajjercy71No ratings yet
- Chapter 5 French PDFDocument70 pagesChapter 5 French PDFAman BhatiaNo ratings yet
- Chapter 5 FrenchDocument70 pagesChapter 5 FrenchVaibhav SharmaNo ratings yet
- PHY 102: Quantum Physics: Topic 4 Introduction To Quantum TheoryDocument24 pagesPHY 102: Quantum Physics: Topic 4 Introduction To Quantum TheorySuhardi EffendyNo ratings yet
- Lecture 5Document18 pagesLecture 5Fong Wei JunNo ratings yet
- BasicQuantumMechanics PDFDocument43 pagesBasicQuantumMechanics PDFMOHAMMAD ZAINNo ratings yet
- Planned Sequence: Examine Classical WavesDocument17 pagesPlanned Sequence: Examine Classical Waveskasun1237459No ratings yet
- ch35 LectureDocument37 pagesch35 Lectureeasylin0126No ratings yet
- AppuntiDocument20 pagesAppuntimarcoNo ratings yet
- Chapter 5: Systems With Two Degree of FreedomDocument45 pagesChapter 5: Systems With Two Degree of Freedomjawad khalidNo ratings yet
- BasicsofQM 1Document20 pagesBasicsofQM 1MOHAMMAD ZAINNo ratings yet
- PowerPoint Files-Chapter 3Document81 pagesPowerPoint Files-Chapter 3Ankit Ambani100% (1)
- Response: Free or Forced in This Chapter: Free Response, I.E. No External Forces Are AppliedDocument12 pagesResponse: Free or Forced in This Chapter: Free Response, I.E. No External Forces Are AppliedCorinne Wesnee YuNo ratings yet
- ME 451 Mechanical Vibrations Laboratory Manual: A. G. Haddow Haddow@egr - Msu.edu Edited by G. D. RecktenwaldDocument42 pagesME 451 Mechanical Vibrations Laboratory Manual: A. G. Haddow Haddow@egr - Msu.edu Edited by G. D. RecktenwaldfaqhrulNo ratings yet
- Examples Mode ShapesDocument1 pageExamples Mode Shapesjimawsd569No ratings yet
- Vibrations: Free Response of Multi-Degree-of-Freedom SystemsDocument8 pagesVibrations: Free Response of Multi-Degree-of-Freedom SystemsCharlie TejNo ratings yet
- 3.1 Free Vibration 3.1.1 Equation of Motion & Its SolutionDocument10 pages3.1 Free Vibration 3.1.1 Equation of Motion & Its SolutionAryan BhattaraiNo ratings yet
- 3.1 Free Vibration 3.1.1 Equation of Motion & Its SolutionDocument10 pages3.1 Free Vibration 3.1.1 Equation of Motion & Its SolutionAryan BhattaraiNo ratings yet
- F KX X C X M: Chapter 4: Multi Degree of Freedom SystemsDocument11 pagesF KX X C X M: Chapter 4: Multi Degree of Freedom SystemsTAPASVI BHATTNo ratings yet
- Cho-Models To Solve Coupled PendulDocument4 pagesCho-Models To Solve Coupled PendulAqe KitamNo ratings yet
- CH 4Document69 pagesCH 4Abraham ChalaNo ratings yet
- Two-Degree-of-Freedom Systems: William J. Palm IIIDocument7 pagesTwo-Degree-of-Freedom Systems: William J. Palm IIIHensel KevinNo ratings yet
- Mechanical - Engineering - Mechanical Vibrations - Vibrations of Two Degree of Freedom Systems - NotesDocument28 pagesMechanical - Engineering - Mechanical Vibrations - Vibrations of Two Degree of Freedom Systems - NotesSahrish RaeesNo ratings yet
- Z - Transforms E4Document21 pagesZ - Transforms E4HayderyNo ratings yet
- Numerical Integration N6Document23 pagesNumerical Integration N6HayderyNo ratings yet
- Power Series Solutions of ODE E3Document17 pagesPower Series Solutions of ODE E3HayderyNo ratings yet
- Modeling and Simulation of The Orthogonal Cut by Using The Law of DamageDocument4 pagesModeling and Simulation of The Orthogonal Cut by Using The Law of DamageHayderyNo ratings yet
- An Aircraft Engine Has A Rotating Unbalanced Mass M at Radius RDocument1 pageAn Aircraft Engine Has A Rotating Unbalanced Mass M at Radius RHayderyNo ratings yet
- Cooling and Heating Load CalculationsDocument51 pagesCooling and Heating Load CalculationsHaydery100% (1)
- Cooling and Heating Load CalculationsDocument51 pagesCooling and Heating Load CalculationsHaydery100% (1)
- 5@problems On Time and WorkDocument10 pages5@problems On Time and WorkAmul ChiluveruNo ratings yet
- (Contemporary Soviet Mathematics) V. M. Alekseev, V. M. Tikhomirov, S. V. Fomin (Auth.) - Optimal Control-Springer US (1987) PDFDocument322 pages(Contemporary Soviet Mathematics) V. M. Alekseev, V. M. Tikhomirov, S. V. Fomin (Auth.) - Optimal Control-Springer US (1987) PDFthassio luan alves rodriguesNo ratings yet
- Office Sys DriverDocument61 pagesOffice Sys DriverHum ZaaNo ratings yet
- Cusat PapersDocument2 pagesCusat PapersAbheek KashyapNo ratings yet
- Program-Circular Linked ListDocument9 pagesProgram-Circular Linked ListYajushiNo ratings yet
- William Stallings Data and Computer Communications 7 Edition Need For Protocol ArchitectureDocument8 pagesWilliam Stallings Data and Computer Communications 7 Edition Need For Protocol ArchitectureSandhya PandeyNo ratings yet
- Unit - 3: Big Data AnalyticsDocument23 pagesUnit - 3: Big Data AnalyticsaNo ratings yet
- A Comparative Study On Market Basket Analysis and Apriori Association TechniqueDocument4 pagesA Comparative Study On Market Basket Analysis and Apriori Association TechniqueRofi Abul HasaniNo ratings yet
- Lecture Planner - Computer Science - PDF Only - Uday 2025Document1 pageLecture Planner - Computer Science - PDF Only - Uday 2025BhavishyarohillaNo ratings yet
- WCF ArchitectureDocument67 pagesWCF Architecturepatidar.shekharNo ratings yet
- Mca Sem I Mcsl-017 Lab QuestionDocument18 pagesMca Sem I Mcsl-017 Lab QuestionkanaksanketNo ratings yet
- UPM Lab Task 1 (Numerical Method)Document9 pagesUPM Lab Task 1 (Numerical Method)Faizal Juan KumarNo ratings yet
- Android Using Menus: Notes Are Based OnDocument26 pagesAndroid Using Menus: Notes Are Based Onlenam_dnNo ratings yet
- Flexit InternationalDocument4 pagesFlexit InternationalAhmed Magdy100% (1)
- 3.2.2 Circuit Switching, Packet Switching and RoutersDocument8 pages3.2.2 Circuit Switching, Packet Switching and RoutersDeewas Pokh100% (1)
- Energy Consumption in Data CentersDocument3 pagesEnergy Consumption in Data CentersAnte NekicNo ratings yet
- Discussion Between ACase and Macintosh 264 - 2011-09-25Document3 pagesDiscussion Between ACase and Macintosh 264 - 2011-09-25macintosh264No ratings yet
- Documents: Search Books, PresentationsDocument11 pagesDocuments: Search Books, PresentationsAnn NersisyanNo ratings yet
- Metode Numerik - FullDocument18 pagesMetode Numerik - FullDedi NurpadilahNo ratings yet
- Sensitivity Analysis of Transportation ProblemsDocument9 pagesSensitivity Analysis of Transportation ProblemspedrosNo ratings yet
- DipeshHaria (5,0)Document4 pagesDipeshHaria (5,0)api-19878312No ratings yet
- Grade 10 ICT Exam On Units 1, 2, 3, 4 (English)Document3 pagesGrade 10 ICT Exam On Units 1, 2, 3, 4 (English)Asma100% (1)
- 06 Continual Service ImprovementDocument19 pages06 Continual Service ImprovementIchwan Habibie100% (1)
- DAA-unit 3Document16 pagesDAA-unit 3saisandeep1912No ratings yet
- ESCL-QSP-005, Corrective Action ProcedureDocument6 pagesESCL-QSP-005, Corrective Action Procedureadiqualityconsult100% (1)
- Oracle Tuning Session LongopsDocument2 pagesOracle Tuning Session LongopsshubhrobhattacharyaNo ratings yet
- How To Disable 'Autorun - Inf' To Prevent Virus Attack Computer. TagsDocument4 pagesHow To Disable 'Autorun - Inf' To Prevent Virus Attack Computer. Tagsjitu_211003No ratings yet